傳感器測(cè)量系統(tǒng)在仿生機(jī)器手中的應(yīng)用
2020-05-27 12:15:12郭炳延
通信電源技術(shù) 2020年6期
關(guān)鍵詞:測(cè)量
郭炳延
(中國(guó)礦業(yè)大學(xué),江蘇 徐州 221116)
1 測(cè)量系統(tǒng)硬件結(jié)構(gòu)
圖1 為測(cè)量系統(tǒng)硬件原理框圖。該測(cè)量系統(tǒng)主要由直流源、交流源、電阻應(yīng)變傳感器、電容傳感器、NTC 熱敏電阻、FPGA、舵機(jī)和顯示裝置組成。電源輸出電流,經(jīng)傳感器測(cè)量電路后,將模擬信號(hào)輸入FPGA,通過FPGA 內(nèi)程序算法,進(jìn)行高速信號(hào)處理,控制舵機(jī)轉(zhuǎn)向以及輸出顯示[1-2]。
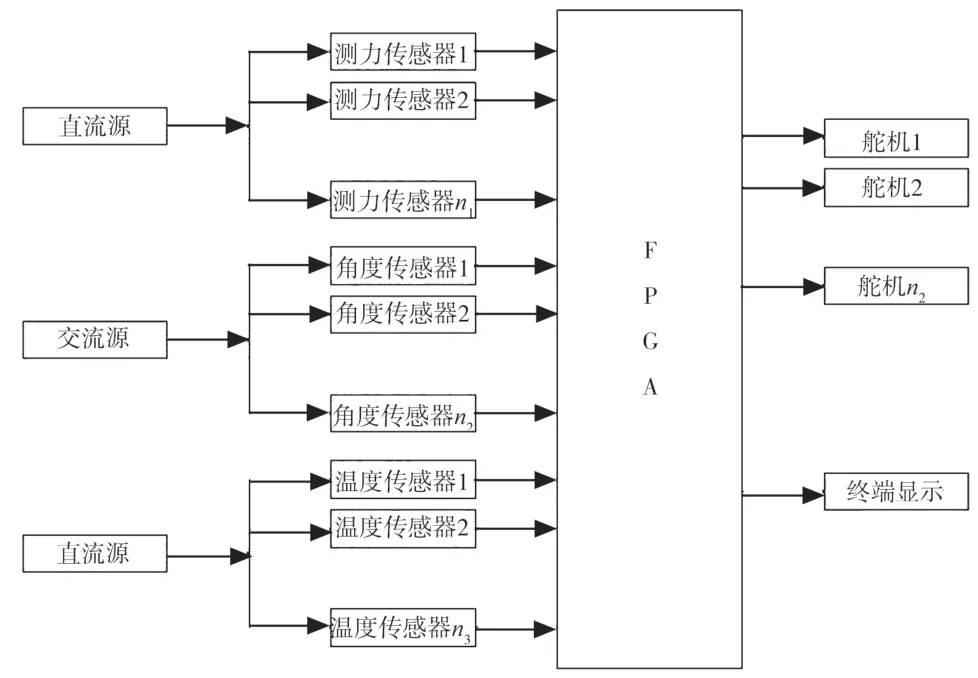
圖1 系統(tǒng)硬件原理圖
1.1 測(cè)力傳感器
1.1.1 裝置結(jié)構(gòu)
應(yīng)變片的基底固定在仿生機(jī)器手的上下表面里(根據(jù)手指大小確定基底個(gè)數(shù)n1),一個(gè)基底上粘有4 個(gè)應(yīng)變片,上面2 片,下面2 片,如圖2、圖3 所示。
1.1.2 測(cè)量轉(zhuǎn)換電路圖
將每個(gè)基底上的4 片應(yīng)變片接成全橋差動(dòng)等臂橋的形式。每個(gè)相對(duì)臂所接應(yīng)變片為一組,當(dāng)受外部力作用時(shí),一組受壓一組受拉。應(yīng)變片差動(dòng)連接如圖4所示。

圖2 仿生機(jī)械手指骨側(cè)示圖

圖3 應(yīng)變片粘貼俯視(仰視)圖
1.1.3 工作原理
電阻應(yīng)變片是將被測(cè)量的力通過它產(chǎn)生的金屬?gòu)椥孕巫冝D(zhuǎn)化為電阻值變化的敏感元件,測(cè)量時(shí)將應(yīng)變片粘貼到彈性金屬的受力部位上,通過測(cè)量電路使輸出電壓與被測(cè)量的力成比例,從而實(shí)現(xiàn)對(duì)力的檢測(cè)。
設(shè)一根電阻絲未受力時(shí)原始電阻值為:

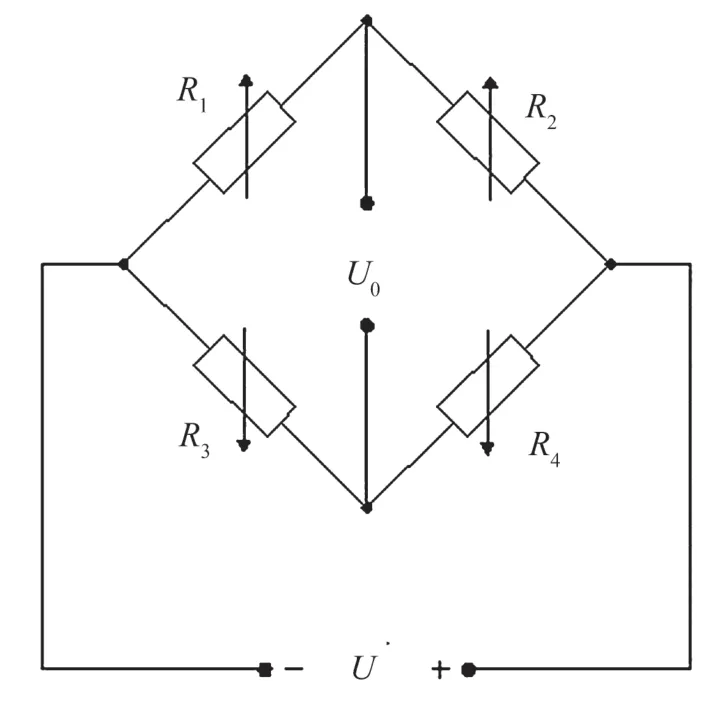
圖4 全橋差動(dòng)連接圖
在外力F的作用下,電阻絲的ρ、l、S發(fā)生變化,引起電阻變化ΔR,相對(duì)變化為:

因?yàn)镾=π·r2,則截面積ΔS=2πrΔr,相對(duì)變化為:

將式(3)代入式(2)可得:

因?yàn)榘雽?dǎo)體應(yīng)變電阻溫度系數(shù)較大,非線性嚴(yán)重,故采用金屬應(yīng)變電阻。由于Δρ/ρ很小,可以忽略。根據(jù)應(yīng)力與應(yīng)變的關(guān)系:σ=Eε,進(jìn)一步推出電阻變化率與應(yīng)力關(guān)系:

在外力的作用下,應(yīng)變片的電阻發(fā)生了變化,破壞了電橋的平衡。若R1、R2、R3、R4分別產(chǎn)生ΔR1、ΔR2、ΔR3、ΔR4的電阻變化。由于滿足R1=R2=R3=R4(等臂橋),且ΔR1=-ΔR2=-ΔR3=R4,則電橋輸出電壓U0為:

由此推出應(yīng)力與輸出電壓的關(guān)系方程,實(shí)現(xiàn)了對(duì)力的檢測(cè)。此外,電壓靈敏度KU為:

根據(jù)如上公式推導(dǎo),可以看出測(cè)量結(jié)果沒有非線性誤差,并且電壓靈敏度較高,由輸入電壓U決定。此外,通過線路補(bǔ)償?shù)姆椒ǎ擅钕藴囟人鸬南到y(tǒng)誤差,其中R2、R3為補(bǔ)償電阻。
1.1.4 工作過程
直流源接入后,測(cè)力傳感器輸出連續(xù)的模擬信號(hào),F(xiàn)PGA 進(jìn)行高速的AD 轉(zhuǎn)換,并通過算法控制舵機(jī)與終端顯示,從而實(shí)現(xiàn)對(duì)機(jī)器手表面所受力的檢測(cè)與控制。
1.2 角度傳感器
1.2.1 裝置結(jié)構(gòu)
圖5 為關(guān)節(jié)主視圖,3 個(gè)半圓極板和舵機(jī)裝在關(guān)節(jié)中,左右半圓極板相對(duì)面積為0,舵機(jī)軸旋轉(zhuǎn)帶動(dòng)中間半圓極板和上一級(jí)指骨,從而可以測(cè)量關(guān)節(jié)的角位移。
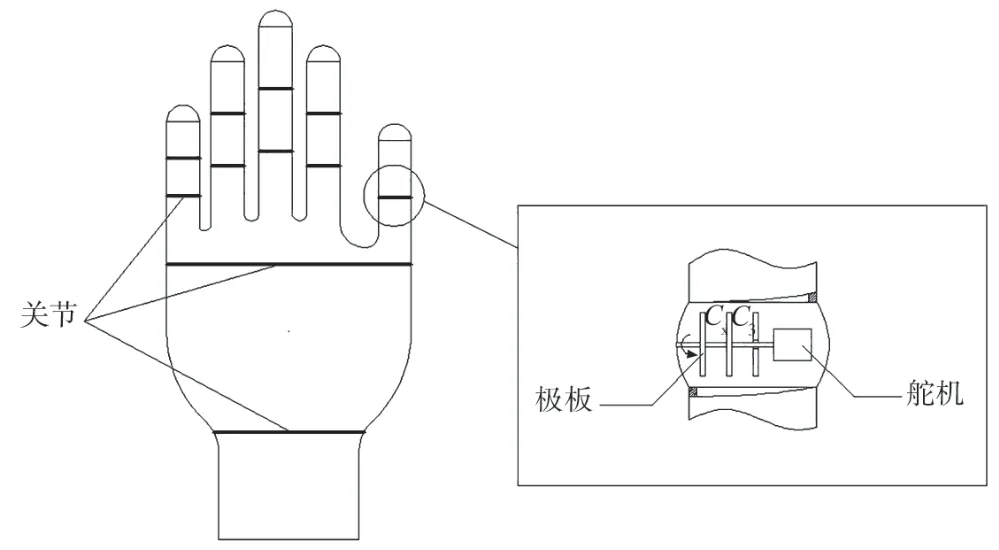
圖5 仿生機(jī)器手關(guān)節(jié)主視圖
1.2.2 測(cè)量轉(zhuǎn)換電路圖
當(dāng)左極板與中間極板相對(duì)面積變化ΔS時(shí),右極板與中間極板相對(duì)面積變化-ΔS,由可知ΔCx=-ΔC3,即Cx與C3為差動(dòng)電容。
設(shè)C1=C2=Cx=C3=C,電橋平衡,輸出U0=0,差動(dòng)交流等臂電橋連接圖如圖6 所示。

圖6 差動(dòng)交流電橋連接圖
1.2.3 工作原理
這里角度傳感器為變面積型電容傳感器,是將被測(cè)量的角位移通過極板相對(duì)面積的改變轉(zhuǎn)化為電容變化。測(cè)量時(shí)固定一個(gè)半圓極板,將另一半圓極板與旋轉(zhuǎn)軸相連,通過測(cè)量電路使電容的變化與被測(cè)量的角位移成正比,從而實(shí)現(xiàn)對(duì)力的測(cè)量。
在舵機(jī)作用下,極板間電容發(fā)生變化,破壞了電橋的平衡。若電容Cx產(chǎn)生ΔC的變化,則電容C3產(chǎn)生-ΔC的變化,此時(shí)電橋輸出電壓U0為:


由此實(shí)現(xiàn)了對(duì)機(jī)器手關(guān)節(jié)角位移的檢測(cè)。此外,電壓靈敏度KU為:

根據(jù)如上公式推導(dǎo),可以看出測(cè)量結(jié)果沒有非線性誤差,并且電壓靈敏度較高。
1.2.4 工作過程
交流電源接入后,角度傳感器輸出連續(xù)變化的交流信號(hào),F(xiàn)PGA 進(jìn)行高速的AD 轉(zhuǎn)換,并通過算法控制舵機(jī)與終端顯示,從而實(shí)現(xiàn)對(duì)機(jī)器手關(guān)節(jié)角位移的檢測(cè)與控制。
1.3 溫度傳感器
1.3.1 裝置結(jié)構(gòu)
圖2 為仿生機(jī)械手指骨側(cè)示圖,NTC 熱敏電阻位于兩個(gè)基底之間,緊貼在內(nèi)部防護(hù)皮上,使外部熱量可以快速傳遞到熱敏電阻中,從而實(shí)時(shí)準(zhǔn)確反應(yīng)外部溫度。
1.3.2 測(cè)量轉(zhuǎn)換電路圖
利用一般線路補(bǔ)償法測(cè)量NTC熱敏電阻的阻值(溫度越高,電阻越小)。
設(shè)R1=R2=R3=R4,電橋平衡,輸出U0=0,圖7 為連接圖。
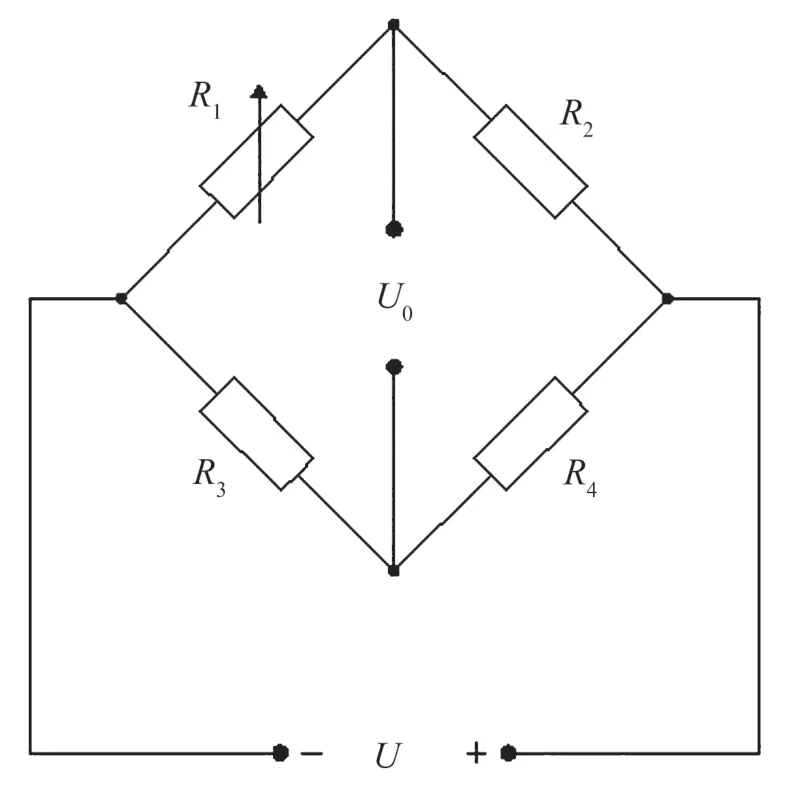
圖7 一般線路補(bǔ)償連接圖
1.3.3 工作原理
NTC 熱敏電阻具有很高的負(fù)溫度系數(shù),即溫度越高,阻值越小,且具有明顯的非線性。測(cè)量時(shí)將NTC熱敏電阻粘貼到仿生機(jī)器手的表面里,通過測(cè)量電路使輸出電壓與被測(cè)溫度成比例關(guān)系,從而實(shí)現(xiàn)對(duì)溫度的檢測(cè)。
外部溫度改變時(shí),NTC 熱敏電阻阻值改變,電橋平衡被破壞。由電路圖可列方程:

因?yàn)镹TC 熱敏電阻阻值與溫度呈非線性,所以可以通過查表的方式獲得輸出電壓對(duì)應(yīng)的電阻值所代表的溫度,由此實(shí)現(xiàn)了對(duì)機(jī)器手表面溫度的檢測(cè)。此外,電壓靈敏度KU為:


可以增大R1以減小非線性誤差。
1.3.4 工作過程
直流源接入后,溫度傳感器輸出連續(xù)變化的模擬信號(hào),F(xiàn)PGA 進(jìn)行高速的AD 轉(zhuǎn)換,并通過算法控制舵機(jī)與終端顯示,從而實(shí)現(xiàn)對(duì)機(jī)器手表面溫度的檢測(cè)與控制。
1.4 FPGA
FPGA 相比于MCU 和DSP 具有高速信號(hào)處理、AD 采樣率高和更大的并行度等優(yōu)點(diǎn),更符合本系統(tǒng)所要求的快速、穩(wěn)定、準(zhǔn)確等高性能。
FPGA 上采用低電壓差分信令(LVDS)輸入,僅需一個(gè)電阻器和一個(gè)電容器就能實(shí)現(xiàn)模擬輸入信號(hào)的數(shù)字化。由于數(shù)百組LVDS 輸入駐留在生成電流的FPGA 器件上,因此可通過單個(gè)FPGA 芯片實(shí)現(xiàn)數(shù)百模擬信號(hào)的數(shù)字化,大大簡(jiǎn)化外圍電路的搭建,實(shí)用性高。
2 數(shù)據(jù)處理
在現(xiàn)實(shí)測(cè)試的過程中,數(shù)據(jù)中含有各種誤差,產(chǎn)生的原因可能是線路間信號(hào)的干擾或是機(jī)器抖動(dòng)帶來的噪聲。為了獲得最可信賴的測(cè)量結(jié)果,采用最小二乘法擬合數(shù)據(jù)曲線,使各測(cè)量值的殘差平方和最小,從而提高測(cè)量數(shù)據(jù)的準(zhǔn)確性與可信性。
3 結(jié)論
應(yīng)用電阻應(yīng)變傳感器測(cè)量仿生機(jī)器手所受的壓力,應(yīng)用電容傳感器測(cè)量仿生機(jī)器手關(guān)節(jié)的角位移,應(yīng)用NTC 熱敏電阻傳感器測(cè)量仿生機(jī)器手表面的溫度,利用FPGA 對(duì)測(cè)量數(shù)據(jù)進(jìn)行處理,可以有效地監(jiān)測(cè)機(jī)器手工作狀態(tài),為其安全穩(wěn)定運(yùn)行起著必不可少的作用。本系統(tǒng)也可以經(jīng)改進(jìn)后移植到其他物聯(lián)網(wǎng)領(lǐng)域。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00