智能化全鋼集成式爬架結構可靠性分析
2020-05-25 09:06:13劉焱賀子奇
大眾科學·上旬 2020年3期
劉焱 賀子奇


摘 要:智能化全鋼集成式爬架是一種用于高層或超高層建筑的新型智能化外腳手架,在高度的城鎮(zhèn)化建設中具有重要的意義。本文以某城市高層建筑項目為例,采用智能化全鋼集成式爬架,對智能化全鋼集成式爬架施工技術性能進行介紹,并選取爬架中的框架立桿和附墻支座等處采用有限元分析的方法進行驗算,并對升降設備、提升支座、防墜裝置和 卸荷裝置進行驗算。通過分析有效實現(xiàn)方案優(yōu)化,驗證了智能化全鋼集成式爬架施工應用中的可靠性性和可行性。
關鍵詞:爬架;有限元分析;ANSYS;可靠性
Abstract: Intelligent all steel integrated climbing frame is a new type of intelligent external scaffold for high-rise or super high-rise buildings, which is of great significance in high-level urbanization construction. Taking a high-rise building project in a city as an example, this paper introduces the construction technical performance of the intelligent all steel integrated climbing frame, and selects the frame pole and wall attached support in the climbing frame to use the finite element analysis method for checking calculation, and checks the lifting equipment, lifting support, anti falling device and unloading device. Through the analysis of the scheme optimization, the reliability and feasibility of the intelligent all steel integrated climbing frame construction application are verified.
Key words:Climbing frame;Finite element analysis; ANSYS; Reliability
中圖分類號:TU603? ? ? 文獻標識碼:A
0 引言
改革開放以來,我國經(jīng)濟迅猛發(fā)展,城鎮(zhèn)化率不斷加大,城市人口密度加大,房屋用地越來越少,樓層原來越高。隨著建筑逐漸增高,常規(guī)腳手架已不再適應現(xiàn)在建筑速度。如何提高建筑工程施工效率和實現(xiàn)綠色環(huán)保施工已成為建筑行業(yè)迫切問題。智能化全鋼集成式腳手架具有巨大的優(yōu)勢,不僅加快建筑工程施工步伐,而且在施工安全方面也自帶防范裝置。同時爬架在施工過程中受到多種靜荷載、動荷載和認為活動等不利因素的影響,因此,研究施工技術性能和荷載穩(wěn)定性對腳手架的影響,對指導腳手架設計施工、保證腳手架安全具有重要的工程意義。
1 智能化全鋼集成式爬架設計概況
1.1 智能化全鋼集成式爬架簡介
能化全鋼集成式爬架是新一代附著式升降腳手架,巧妙的將承力機位和架體結合在一起,產品全部工廠化預制,標準化安裝,安全文明。具有安全、快捷、經(jīng)濟、美觀等優(yōu)點。
1.2 智能化全鋼集成式爬架的架體構成
智能化全鋼集成式爬架按流水段等工程實際情況以組為提升單位,由架體單元、附著支承系統(tǒng)、提升系統(tǒng)、控制系統(tǒng)、防墜落裝置和荷載同步控制檢測系統(tǒng)等六部分組成[1]。
1.3 智能化全鋼集成式爬架的架體單元
架體單元主要由定型的立桿、型鋼腳手板、三角支撐架、水平桁架、內挑密封翻板、防護網(wǎng)等組成;前立桿和后立桿前后通過和腳手板連接,縱向通過水平桁架連接,型鋼腳手板連接立桿連接桿或三角支撐架,水平支撐桁架和立桿及外鋼網(wǎng)形成空間桁架結構,架體荷載通過該水平支撐桁架將力傳遞到導軌主框架上。
1.4 附著式升降腳手架的附著支撐系統(tǒng)
包括導軌,附墻支座,承載螺栓,墊片等。其大樣如所示:
該支座構造特征為:附墻支座的防墜擺塊上同軸安裝了觸發(fā)條,防墜擺塊頭輕尾重仰頭,側面同軸安裝觸發(fā)條,支座上部設置有定位器。
工作原理為:利用擺塊復位的時間差實現(xiàn)防墜落。
腳手架提升時,導軌上升,導軌橫桿與防墜擺塊無接觸,導軌橫桿碰上觸發(fā)條轉動,腳手架正常提升。
腳手架正常下降時,導軌下降,導軌橫桿碰上觸發(fā)條,帶動擺塊轉動;腳手架繼續(xù)緩慢下降,導軌橫桿脫離觸發(fā)條,防墜擺塊在尾部重力作用下復位,導軌正常緩慢下降,腳手架正常下降。
腳手架墜落時,導軌橫桿撞擊觸發(fā)條轉動,帶動防墜擺塊轉動,當導軌橫桿脫離觸發(fā)條時,防墜擺塊來不及復位,防墜擺塊尾部撞擊支座后橫隔板,防墜擺塊立即制動,防墜擺塊頭上部卡住導軌橫桿,導軌立即制動,防止腳手架繼續(xù)墜落。
1.5 提升系統(tǒng)
一般采用電動葫蘆,下吊點設吊點桁架與導軌立桿用螺栓連接,上吊點固定在結構上。
1.6 智能化全鋼集成式爬架的控制系統(tǒng)
控制系統(tǒng)包括:重力傳感器,電氣線路和總控箱,分控箱。架體的升降采用電動葫蘆升降,并配設專用電氣控制線路。該控制系統(tǒng)設有漏電保護、錯斷相保護、失載保護、正、反轉、單獨升降、整體升降和接地保護等裝置,且有指示燈指示。線路繞建筑物一周布設在架體內。
1.7 附著式升降腳手架的防墜落裝置
擺塊式防墜器、定位器和智能控制系統(tǒng)相結合,極大地提高了附著式升降腳手架的安全防墜效果。
附著式升降腳手架的防傾覆措施:附著支座具有導向、承載、防傾、防墜作用,每榀導軌主框架均配三個附著支座,架體使用中,必須按審定的操作規(guī)程及施工方案進行施工,保證在提升和使用工況下至少有兩個附著支座與結構連接。
1.8 荷載同步控制檢測系統(tǒng)
由中央檢測顯示儀、中間站、載荷傳感器、九芯線、三芯線組成。中央檢測顯示儀為單板計算機,可同時監(jiān)視、分析40個提升機位的載荷狀況,一旦機位載荷超出預設范圍,發(fā)生欠載或超載現(xiàn)象,中央檢測顯示儀可發(fā)出聲光報警信號、指示故障地址、切斷動力電源,待故障排除后方可繼續(xù)使用;中繼站可中轉來自中央檢測顯示儀與載荷傳感器的信息,并簡化信號傳輸線路;載荷傳感器可將機位載荷轉化為電信號;九芯線、三芯線用于各電子裝置間的電信號傳輸[2]。
2 工程實例
2.1項目概況
本工程為某市錦祥花園二期棚戶區(qū)改造項目,該項目分為三個地塊,主要有22棟主樓和若干個附屬樓,樓棟單體較多,總投資大概18.35億元,項目周期較短,工程合同工期為22個月,該項目采用EPC模式(即設計、采購、施工、試運行),本文將以宗地三建筑4#樓為例進行智能化集成式爬架穩(wěn)定性分析,4#樓為地上33層、地下2層,采用框架剪力墻結構,建筑面積23042.93m2。建設項目使用TL-06型附著式全鋼爬架搭配鋁模進行施工,大部分樓棟從 1 層開始使用鋁模,2層開始安裝爬架,3 層底板開始使用爬架與鋁模進行組合搭配。
2.2爬架相關技術參數(shù)
3 荷載計算
3.1靜荷載標準值
3.1.1主框架自重
主框架由方管焊接架體及導軌組成
主框架自重為:
3.1.2中間支撐框架自重計算
中間支撐框架由內外立桿及橫撐、斜撐組成。
單個框架自重:1.652KN,一個計算跨度內包含兩個中間框架。
兩個合計自重:
3.1.3底部水平支撐桁架自重
3.1.4防護網(wǎng)自重
架體采用定型防護網(wǎng),包括正面及兩側護網(wǎng),合計自重:
3.1.5腳手板自重
腳手板包括底部腳手板及以上各層腳手板(含主腳手板和副腳手板及翻板)
自重合計:
3.1.6上下吊點自重:
3.1.7升降設備(一個7.5t電動葫蘆900N)
3.2 施工活荷載標準值
根據(jù)施工具體情況,按使用、升降及墜落三種工況確定活荷載標準值。
3.2.1施工活荷載
根據(jù)《建筑施工工具式腳手架安全技術規(guī)范》(JGJ202-2010):
結構施工時按二層同時作業(yè)計算,使用狀況下施工荷載按每層3 kN/m2,升降及墜落狀況下按每層0.5 kN/m2計算;裝修施工時按三層同時作業(yè)計算,使用狀況下施工荷載按每層2 kN/m2計算,升降及墜落狀況下按每層0.5 kN/m2計算。
1)結構施工
使用狀態(tài)
升降、墜落狀態(tài)
2)裝修施工
使用狀態(tài)
升降、墜落狀態(tài)
施工活荷載標準值QK取21.24KN(施工狀態(tài));5.31KN(升降狀態(tài))
3.2.2風荷載
根據(jù)《建筑施工工具式腳手架安全技術規(guī)范》(JGJ202-2010),風荷載計算公式為:
其中為風振系數(shù),取1.0
風壓高度變化系數(shù),按現(xiàn)行國家標準《建筑結構荷載規(guī)范》(GB50009-2012)的規(guī)定采用,按照D類地區(qū),150m高建筑取值1.33
腳手架風荷載體型系數(shù),應按背靠建筑物狀況選取,全封閉時取,敞開開洞時,其中為擋風系數(shù),應為腳手架擋風面積與迎風面積之比;密目式安全立網(wǎng)的擋風系數(shù)應按網(wǎng)=0.8計算。
基本風壓值,應按現(xiàn)行國家標準《建筑結構荷載規(guī)范》(GB50009-2012)的附表D.4中n=10年的規(guī)定采用。工作狀態(tài)應按本地區(qū)的10年風壓最大值選用,取0.50KN/m2,升降、墜落工況時,可取0.25KN/m2.
4 計算模型與分析
4.1 計算模型
計算軟件選用ANSYS通用有限元分析軟件,考慮到結構條件,在爬架升降過程中,架體立桿和附墻支座為最不利。并基于這兩個部位進行荷載計算。
4.2 框架立桿的穩(wěn)定性驗算
該型號工具式腳手架采用定型框架替代碗扣式腳手架立桿,壓彎桿件穩(wěn)定性應滿足鋼結構規(guī)范對框架桿的穩(wěn)定性要求。框架與水平桁架連接的底部框架立桿受力大,穩(wěn)定性較差,可以對該處框架立桿進行穩(wěn)定性校核。框架承受兩側按一縱距范圍內的荷載,包括靜荷載、活荷載,荷載總和平均施加到內外立桿上。靜荷載標準值包括以下內容:
施工荷載為施工荷載標準值產生的軸向力總和,立桿施工荷載按一縱距內施工荷載總和平均施加到內外兩排立桿上。經(jīng)計算得到,施工荷載標準值:
結構施工:
不考慮風荷載時,框架內外側軸向荷載設計值為:
考慮風荷載時,立桿的軸向壓力設計值為:
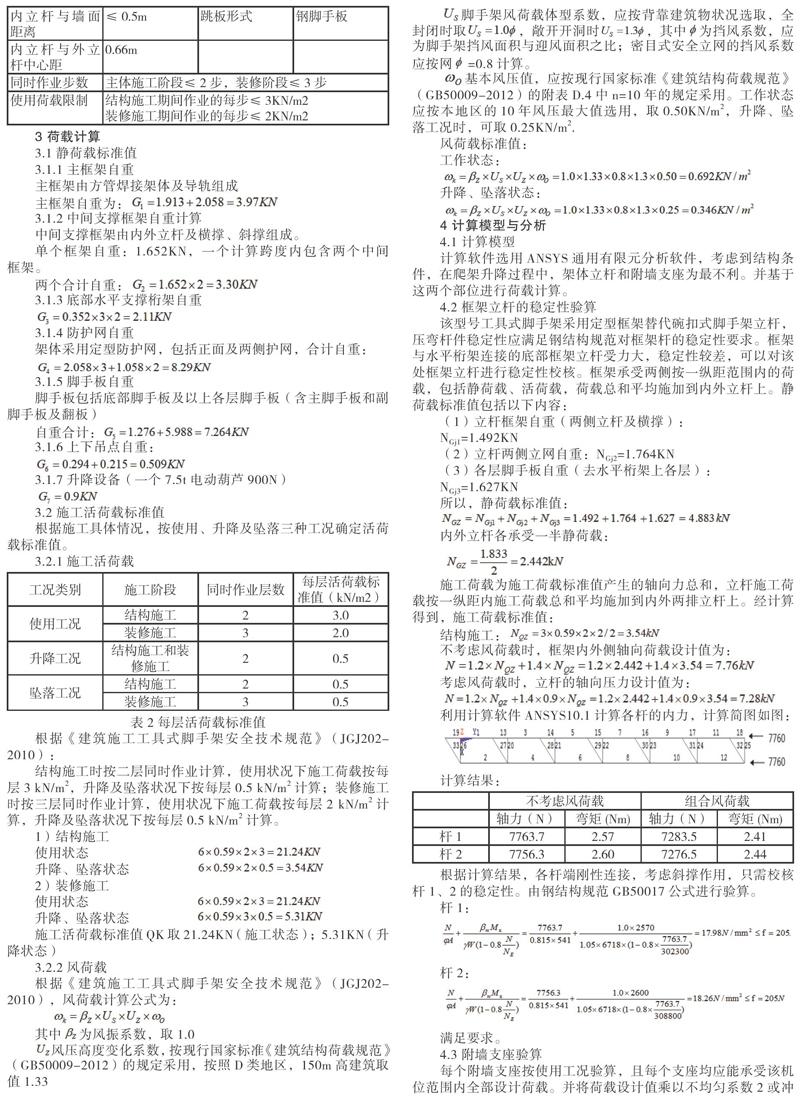
利用計算軟件ANSYS10.1計算各桿的內力,計算簡圖如圖:
計算結果:
根據(jù)計算結果,各桿端剛性連接,考慮斜撐作用,只需校核桿1、2的穩(wěn)定性。由鋼結構規(guī)范GB50017公式進行驗算。
滿足要求。
4.3 附墻支座驗算
每個附墻支座按使用工況驗算,且每個支座均應能承受該機位范圍內全部設計荷載。并將荷載設計值乘以不均勻系數(shù)2或沖擊系數(shù)2進行計算。通過ANSYS有限元計算得到最不利組合作用在支座上的反力。支座荷載設計值
NX=29000N,NY=63080N
乘以荷載不均勻系數(shù)2或沖擊系數(shù)2:
2NX=58000N,2NY=126200N
三角附墻支座驗算,支座材料選擇兩根6.3#槽鋼,受力如圖。
利用有限元軟件Ansys10.1計算結果如下:
按照最不利狀態(tài)驗算,選②桿進行穩(wěn)定驗算:
滿足要求。
4.4 升降設備驗算
荷載計算
恒載:26.34KN
活載(升降工況):6×0.59×2×0.5=3.54KN
荷載設計值:N=1.2×26.34+1.4×3.54=36.5KN
提升設備
本工程采用的兩部7.5T提升電動葫蘆額定起重量為:
N0=7500×9.8=73500N=73.5KN
設計值
其中—附加荷載不均勻系數(shù)
故滿足要求。
4.5 提升支座驗算
提升支座與附墻支座分開,單獨受力,由兩塊厚10mm的鋼板焊接而成,升降工況下,考慮附加荷載不均勻系數(shù),鋼索施加在支座上的力為:NS=78KN
(1)銷軸抗剪驗算:
滿足要求。
(2)支座強度驗算
近似按照受拉構件,取最小受力截面面積驗算:
滿足要求。
(3)焊縫驗算
滿足要求。
(4)連接螺栓驗算
連接螺栓受力小于穿墻螺栓受力,根據(jù)穿墻螺栓驗算結果故同樣滿足要求。
4.6防墜裝置驗算
(1)受力簡圖:
防墜塊鋼板制成,根據(jù)實際工作情況取其最小截面以懸臂構件進行驗算。
(2) 荷載計算
按照實際使用情況驗算防墜塊強度。
使用工況下,考慮沖擊系數(shù)下單個防墜塊荷載設計值:
升降工況下,考慮沖擊系數(shù)單個防墜塊荷載設計值:
(3) 懸臂梁計算
選用最不利情況,即按使用工況進行懸臂梁驗算,
滿足要求。
(4) 銷軸計算
4.7 卸荷裝置驗算
考慮沖擊系數(shù)2,每個卸荷裝置承擔的荷載:
(1)卸荷螺桿驗算:
卸荷裝置采用直徑30mm螺桿,與支座鉸支連接,按照軸心受壓桿驗算:
其中:為考慮軸心受壓的穩(wěn)定系數(shù)。
滿足要求。
(2)與支座連接銷抗剪計算
卸荷裝置通過直徑24mm銷與支座連接,驗算其抗剪性能:
滿足要求。
5結語
本文針對新型智能化集成式爬架在實際工程項目中,介紹和分析爬架原理和使用過程。采用ANSYS軟件進行有限元建模,對爬架框架立桿、附墻支座、升降設備、提升支座、防墜裝置和 卸荷裝置等處進行驗算,有利于分析該爬架在升降過程中的可靠性,保證施工安全。通過分析和研究,驗證爬架的穩(wěn)定性和可靠性。
參考文獻
[1]陳強.附著導軌式升降腳手架在高層住宅樓施工過程中的研究與應用.[D]合肥:安徽建筑大學,2019.
[2]謝永超.附著升降腳手架在超高層建筑施工中的應用.[J].施工技術,2006,35(08):77-80.