軌道交通智能限界檢測技術研發及應用
2020-05-23 10:08:14蔣海
鐵道建筑技術 2020年2期
蔣 海
(中鐵十一局集團電務工程有限公司 湖北武漢 430071)
1 國內外限界檢測現狀
隨著大量軌道交通投入運營,線路行車密度大、養護維修標準高、檢修作業時間短的特點對線路的檢測手段、處理方法等方面提出更高要求。軌道限界檢測是軌道開通運營及運維過程中關注的重要環節,傳統的軌道限界檢測采用模擬的限界框的接觸式測量[1],在竣工驗收中安裝標定工作量大,安全性低;運維中傳統“限界儀”限界檢測模式[2]需要較長時間,限界檢測儀測量數據處理方面較限界檢測框測量模式有顯著改善,但在縮短檢測時間、減少外業工作強度等方面效果不明顯,且安全性低、數據采集效率不高。一種能夠適用于隧道、高架、站臺等不同場景的智能化、數據化限界檢測方法,成為當今發展的急切需求。
為了進一步提高我國限界檢測的技術水平、效率,建立數字化、信息化、智能化的檢測體系,項目組利用三維激光測量獲取數據的方式[3],研發高效、安全、對運營低干擾或零干擾的限界檢測技術。高質量、高精度的限界檢測方法既可以有效提高施工竣工驗收限界檢測水平,也可在日常養護維修、軌道狀態檢查中發揮重要作用,為提升鐵路客運專線的安全性提供技術支撐。
2 基于激光測量掃描技術的自動化限界檢測設備
采用動態移動測量方式、多傳感器高精度測量軌道360°空間范圍方法,研制出集激光掃描設備、高清影像設備、里程計等多類傳感器于一體的軌道小車多傳感器動態精密測量裝置,提出基于高清影像數據的軌道斷面高精度、高密度數據采集方法,針對不同的應用場景采集不同的空間信息,實現全方位覆蓋軌道斷面環境的數據[4],為后續軌道侵限檢測判定技術研究提供數據支持。
2.1 三維激光掃描技術
軌道侵限智能檢測儀通過三維激光掃描[5]設備固定在載體上,掃描儀360°高速旋轉,實時獲取線路橫斷面內的構筑物點云數據信息,同時計軸器同步里程信息實時更新掃描點位里程信息,從而完成軌道限界輪廓數據和里程的同步采集。
三維激光掃描技術主要由高速精確的激光測距儀和反射棱鏡同步獲取掃描點的三維相對坐標。激光測距儀主動發射激光,同時接受線路構筑物表面反射的信號從而進行測距,針對每一個掃描點可測得測站至掃描點的斜距,再配合水平和垂直方向角,可以得到每一掃描點與測站的空間相對坐標[6]。如果測站的空間坐標是已知的,那么可以求得每一個掃描點的三維坐標。
點云坐標測量原理如圖1所示。被測點云的三維坐標在三維激光掃描儀確定的左手坐標系中定義,XY面為橫向掃描面,Z軸與橫向掃描面垂直。
每個激光脈沖橫向掃描角度觀測值為α,縱向掃描角度觀測值為θ,測點到被測點云距離為S,因此任意一個被測云點P相對于測站的三維坐標為:
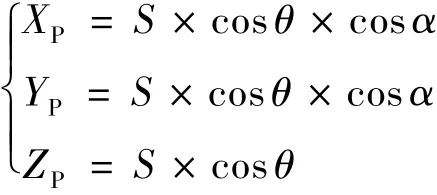
由于限界檢測時以線路橫斷面二維平面判斷構筑物是否侵限,故只需以軌平面中心為坐標原點建立二維坐標系,軌平面中心到測點距離為S1,故被測點相對于軌平面中心坐標為:
三維激光掃描技術利用激光測量技術在動態條件下對軌道進行連續、無縫、高密度、高精度斷面數據采樣,結合高精度的測量定位技術,完成三維點云數據的獲取,最終生成高密度軌道斷面的激光點云,從激光點云中檢測軌道入侵情況并確定具體位置。
2.2 數據提取及處理技術
數據提取及處理技術包括激光數據處理模塊、圖像采集模塊、DMI數據采集模塊,以及針對采集回來的數據進行融合與分析軟件模塊,得到成果數據并進行參數的設定及模型的搭建。將激光掃描設備斷面內的點云實時繪制,點云數據與設備限界標準數據分析對比,判定此位置是否侵限。
2.2.1 點云獲取預處理
掃描儀獲取的點云表面參差不齊,會嚴重影響限界的精度,因此在對點云進行獲取時,先對點云進行過濾,剔除點云周圍的毛刺點。原始點云的坐標為極坐標,可以采用卡爾曼濾波方法對點云進行過濾,最后將極坐標轉換成平面坐標以便進行后續分析。
(1)卡爾曼濾波
Kalman濾波器考慮用如下狀態空間模型描述動態系統:

式中,k為離散時間,系統在時刻k的狀態為X(k)∈Rm;Y(k)∈Rm為對應狀態的觀測信號;W(k)∈Rr為輸入的白噪聲;V(k)∈Rm為觀測噪聲;Φ為狀態轉移矩陣;Г為噪聲驅動矩陣;H為觀測矩陣。
式(1)為狀態方程,式(2)為觀測方程。
通過卡爾曼濾波可以計算出單幀點云數據中所有點相對于該幀點云中心的距離D。
(2)極坐標轉平面坐標
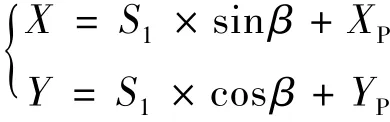
式中,A為點的天頂角;A1為點的天頂角弧度值;V為點的方位角,V1為點的方位角弧度值;D為點到該幀點云中心的距離;X為平面坐標系中該點X坐標值;Y為平面坐標系中該點Y坐標值。
其中式(3)、(4)分別計算點的天頂角和方位角的弧度值,式(5)計算點的平面坐標X值,式(6)計算點的平面坐標Y值。
2.2.2 點云軌道模型配準
(1)點云過濾
提取左右軌道點云,通過對軌道點云的分析后發現,由于設備精度、操作者經驗、環境因素帶來的影響以及電磁波的衍射特性與被測物體表面性質變化和數據拼接配準操作過程的影響,軌道點云數據中不可避免地出現一些噪點。在點云軌道模型匹配過程中濾波處理作為預處理的第一步,對后續的影響比較大,只有在濾波預處理中將噪點、離群點濾除,才能夠更好地進行配準以及限界檢測分析。
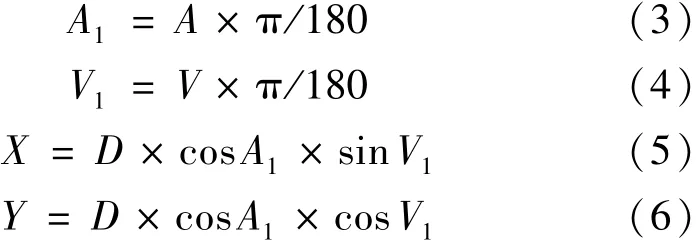
根據獲取地鐵點云數據的特點,采用了基于半徑聚類的方式對離散噪點進行濾除。該算法遍歷點云內每個點,如果在該點半徑r內的點數小于設定的閾值T,則將該點視為噪點。如圖2所示,如果閾值T=1,則左側圓心點的會被刪除,如果閾值T=2則左右側圓心兩個點都將被刪除。
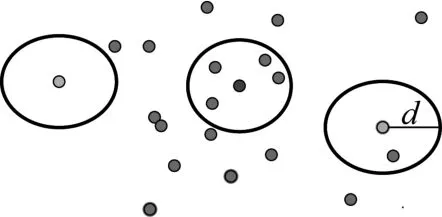
圖2 濾波處理示意
(2)軌道模型匹配
針對軌道模型匹配
采用ICP算法。ICP算法是一種基于純粹幾何模型的3D對象對齊算法,其本質是基于最小二乘法的最優匹配算法,首先通過確定具有相應關系的集合,然后計算最優的剛性變換,重復這個過程直到滿足正確匹配的收斂準則,從而找出目標點集P到參考點集Q的旋轉變換量R和平移變換T。在本技術方案中,目標點集即為濾波后的軌頭點云數據,而參考點集即為標準的軌頭模型點集。
將經過數據提取和去雜后的點云實時繪制,可以形成現場真三維點云場景數據模型圖。
3 軌道侵限系統
軌道侵限智能檢測系統[7-8]通過對三維激光掃描儀的操控并根據里程同步模塊的實時里程記錄,將激光掃描設備斷面內的點云實時繪制,點云數據與設備限界標準數據進行分析對比,判定此位置的點云是否侵限,以音效預警,并記錄超限位置的里程、影像及超限信息等,支持數據導出形成數據報告[9]。
3.1 數據提取轉換及侵限判斷技術
軌道交通限界是以鋼軌頂面連線中點為原點、以鋼軌頂面連線為X軸、以垂直于鋼軌頂面連線為Y軸建立的直角坐標系中的封閉曲線。3D激光掃描儀原始數據是以激光掃描儀為原點坐標,需要根據檢測原理中坐標轉換計算方法,將原始數據坐標轉換為軌平面坐標,統一坐標系。三維激光掃描儀所采集原始數據為無數從線路兩側構筑物表面反射的點云數據,每個點在坐標系中對應有數值關系。通過程序中坐標轉換算法,與設計設備限界進行分析對比,判斷所采集點云數據是否大量存在于設備限界內,則得出構筑物是否侵限[10],見圖3。
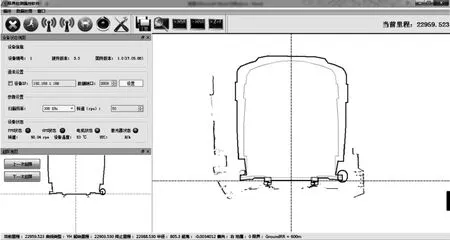
圖3 限界檢測成像
3.2 雜散點去除技術
在構筑物表面進行數據采集過程中,當出現金屬體反光、風沙揚塵等現象時,激光掃描傳感器可能會產生無規律、離散的掃描點,稱之為散點。這種散點處于限界標準內,如果把此類型的散點判斷為侵限點,將對最終結果造成較大的偏差。由于這種散點和其它掃描數據存在較大的偏差,限界檢測程序采用中值濾波算法,將連續采樣的奇數個數據進行排序,取中間值為濾波后的數據,能很好地過濾掉散點干擾,降低了散點對檢測結果造成的偏差[11]。
3.3 檢測數據顯示及存儲技術
軌道侵限智能檢測儀在采集構筑物數據、同步里程數據的同時,數據同步分析單元也在實時計算所采集數據中是否有點云數據侵限,將侵限數值、當前里程、侵限物影像進行存檔,便于整改查看,數據模型圖和檢測結果實時顯示至軟件界面。
3.4 實際檢測結果示例
以某地鐵一段檢測結果為例,檢測后自動生成侵限報告,表明疏散平臺處存在侵限,需要進行整改,見表1。

表1 侵限數據統計
4 現場應用效果
城際鐵路、高速鐵路、城市軌道交通等鐵路[11]雖然制式不同,不同線路類型對限界要求不同,但本技術采用非觸式自動化檢測方法,對線路類型無局限,只需更改計算軟件中限界參數即可實現不同制式不同線路類型的限界檢測。因此,此技術可用于所有鐵路[12]的建設與維護。
隨著城市軌道交通領域的發展,更多的城市大力發展軌道交通,限界檢測作為必要工序,任何線路竣工開通前及運營維護期間均需要對線路進行限界檢測,防止有異物侵限阻礙列車運行。該技術針對城市軌道的智能化限界檢測技術,具有測量精度高、穩定性好、操作簡便、工作效率高的特點,有極大的市場優勢。
軌道侵限智能檢測技術自2017年成功研制以來,已在上海、杭州、長沙、常州、貴陽、無錫等地項目推廣應用,完成了近400條線路限界檢測,以良好的性能、超高的效率獲得業主、設計及監理單位的好評。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
