深海季節性環境變化對半會聚區尺度水面聲定位影響分析
2020-05-22 09:49:42張旭李智生邱仁貴董楠
海洋學報 2020年3期
關鍵詞:測量
張旭,李智生,邱仁貴,董楠
(1.中國人民解放軍91550部隊,遼寧 大連 116023;2.中國人民解放軍91650部隊,廣東 廣州 510320)
1 引言
航行體入水時在海面激發出一類有明顯特征的聲信號,可用于入水點定位[1-2]。此類技術目前在近海工程中已有成功應用[3-4],定位區域通常為數千米范圍。若考慮在深海更大尺度的空間開展海上定位測量,聲信號的傳輸信道和到達方式將發生改變,呈現與淺海明顯不同的定位特性,其測量設計需要結合深海的環境特點及聲信道條件來考慮。海洋環境是水聲定位系統實際使用的重要影響因素,同一設備在不同的季節使用其定位性能很可能出現明顯差別[5]。因此,深海入水點定位測量設計應充分考慮海洋環境的多樣性結構和季節性變化,提高測量系統對環境條件的適應性和寬容性。
近年來有關深海非均勻海洋現象對聲傳播影響方面的研究不斷深入,對海洋環境與聲傳播耦合特征的揭示已細致到中尺度現象三維結構[6-9],甚至延伸到亞中尺度現象[10]和局地不平整海底等復雜結構[11-14]。然而,能夠感知和描述現象并不意味著就能實現準確定位,對于遠離岸站的深海區域,即使是在第一會聚區范圍內對隨機入水目標進行較高精度定位仍然是困難的。目前,對此類無源目標進行有效定位主要有兩種方式[15],一種是方位交會,另一種是時差交會,前者因測向誤差隨距離線性放大不適用于較大的覆蓋范圍,而后者則以信號到達時間差作為測量元素,時延誤差隨距離變化較緩,更適用于深海大范圍區域的定位問題[16]。近年來,水聲定位方法和技術不斷發展,匹配場定位、基于頻域干涉條紋定位或基于多途到達結構定位等方法均取得了一定進展[17]。匹配場處理技術[18-19]可實現環境、聲場與定位的統一處理,將信號處理技術與聲傳播物理模型有機結合,但從已報道的結果來看[20-21],在現有技術條件下該方法仍難以達到多基站交會定位的精度水平。基于頻域干涉條紋的定位技術可利用目標信號頻域干涉條紋的周期振蕩特性實現單基站定位測量[22-23],而基于多途到達結構的定位技術可根據直達波和海面-海底反射波之間的時延差與聲場的相關關系實現目標位置估計[24-25],這兩種方法在布站條件上大為簡化,只需要有限的基站再結合聲場信息即可實現定位,但其穩健程度和定位精度還需進一步提升。綜合比較上述方法,針對在深海半會聚區尺度的測量范圍對隨機入水聲目標定位的問題,采用多基站交會定位仍是相對合理的方案。同時,需要將水聲定位技術與海洋環境條件結合考慮,從機理上認識深海環境的模態變化對定位性能的影響方式和影響程度,進而為測量設計和工程應用提供基礎。
本文以西太平洋典型海域的冬季和夏季水文環境為場景,提出基于時差定位的仿真方法,對不同聲速剖面以及不同收-發條件下定位精度的差異性進行比對,進而討論季節性環境變化對定位性能的影響機制。
2 工況條件與定位原理
2.1 工況條件
對測試的工況條件作如下假設(圖1):
(1)測量海域選取在西太平洋北部;要求覆蓋的測量區域范圍為16 km×16 km;測量海區內海底平坦,水深為5 500 m。
(2)目標入水位置隨機,在測量海區中的散布概率分布由中心向邊緣逐漸減小;分別以水面平臺(水面船或有動力浮標)和近海底平臺(錨系潛標)搭載聲接收器構成水面基站和水下基站,在測量海區的中心和4個頂點各布設1個水面基站和水下基站,構成2組5元接收基陣,對目標聲信號進行采集和處理。
(3)水面基站以吊放方式搭載聲接收器,通過衛星導航定位設備對水面平臺進行定位和授時;同時水面平臺與接收器之間加裝超短基線定位設備,可對吊放的接收器位置進行實時修正,水面平臺正下方±60°區域內定位精度優于1%斜距;測量數據通過水面平臺搭載的無線電通信設備回傳到測量海區附近的中心站進行準實時解算。
(4)水下基站通過潛標系統搭載聲接收器,具備高精度守時和自容式采集功能,布放后由船載設備對其位置進行標定;測量數據先通過水聲通信方式傳到水面平臺,再利用無線電通信方式回傳到中心站進行準實時解算。
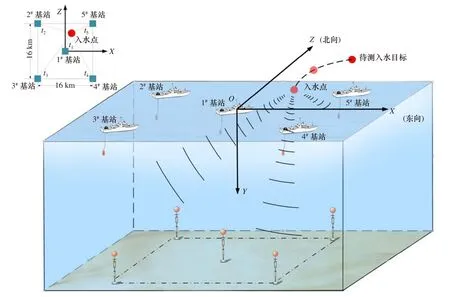
圖1 工況及定位原理示意圖Fig.1 Illustration for operating conditions and localization principle
2.2 定位原理
根據上述工況,目標聲信號到達接收器的信噪比(Signal to Noise Ratio, SNR)可按聲吶方程計算:

式中,各項均以譜級(單位:dB@1 kHz)定義,SL為目標聲信號的聲源級;TL為傳播損失,與海洋環境條件、聲信道及收-發條件有關;NL為背景噪聲級。對于某一測量基站,當SNR大于檢測閾DT時,可檢測到目標聲信號并得出到達時間的估計值(含有一定誤差),獲取3組以上的到達時間信息就可構成2組時差,實現入水點海面二維位置坐標的交會解算。
以測量海區的中心位置為原點O,建立測量直角坐標系,OX軸指向正東方向,OZ軸指向正北方向,OY軸沿垂直方向指向海底(圖1)。設待測目標入水點位置坐標為基站j的 坐標為兩者之間的斜距可表示為

式中,‖·‖2表示向量的l2范數。
若考慮將目標聲信號沿彎曲路徑傳播到接收器的過程等效為沿某一等效聲速直線傳播,且目標入水時間為零時刻,則有rj=cjτj,其中cj為等效聲速,τj為到達時延。對 τj在某一初始位置進行泰勒級數展開[16],

由于測量信息為目標聲信號到達各基站時間的估計值,而目標入水時間未知,用于解算的測量元素為目標聲信號到達各基站的時差,即
由此,時差與待估計變量的函數關系可表示為(以1#基站作為的參考基站)[16]

式中,
目標位置的估計值可由非線性最小二乘法得出

由于待估計參數為目標入水點的二維坐標,利用2組以上聲信號到達時差即可進行解算。文獻[16]已對此類時差交會方法的收斂性進行了分析,其泰勒展式滿足局部線性收斂條件。在迭代求解中,將每次解算的估計值更新為下次迭代的初始值,通過反復計算直到收斂到預設精度,此時的即為最終得到的待估計參數。
3 環境與聲信道
3.1 環境條件
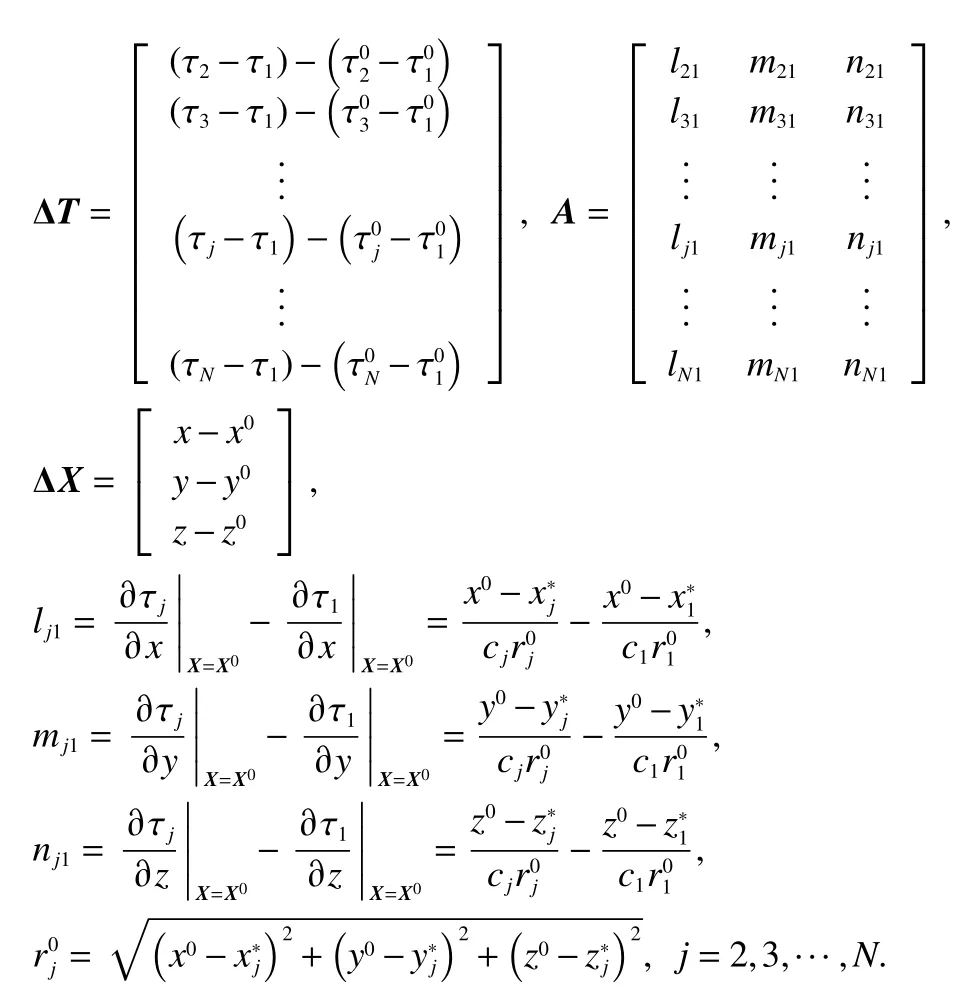
采用WOA09數據集構設環境條件,提取測量海區中心位置處的夏季和冬季氣候態溫、鹽剖面,作為兩類典型季節性環境模態。WOA09數據集為美國國家海洋學資料中心(NODC)發布的全球格點數據集,水平網格為 1°×1°,深度范圍為 0~5 500 m,垂直標準層為33層[26-27]。由溫、鹽剖面根據Mackenzie聲速經驗公式[28]計算聲速剖面(圖2)。根據圖2,該海區夏季聲速剖面為“季節性溫躍層+主溫躍層+深海等溫層”結構,近表層有較強的負聲速梯度,近表層以下的主溫躍層也保持負梯度聲速,聲速極小值對應的深海聲道軸約在900 m附近,其下的深海等溫層為正梯度結構;冬季聲速剖面為“混合層+主溫躍層+深海等溫層”結構,深海聲道軸位置與夏季相近,近表層150 m的混合層代替了夏季的季節性溫躍層,層中為正梯度聲速,混合層以下的聲速剖面結構與夏季相接近。
3.2 聲信道特性
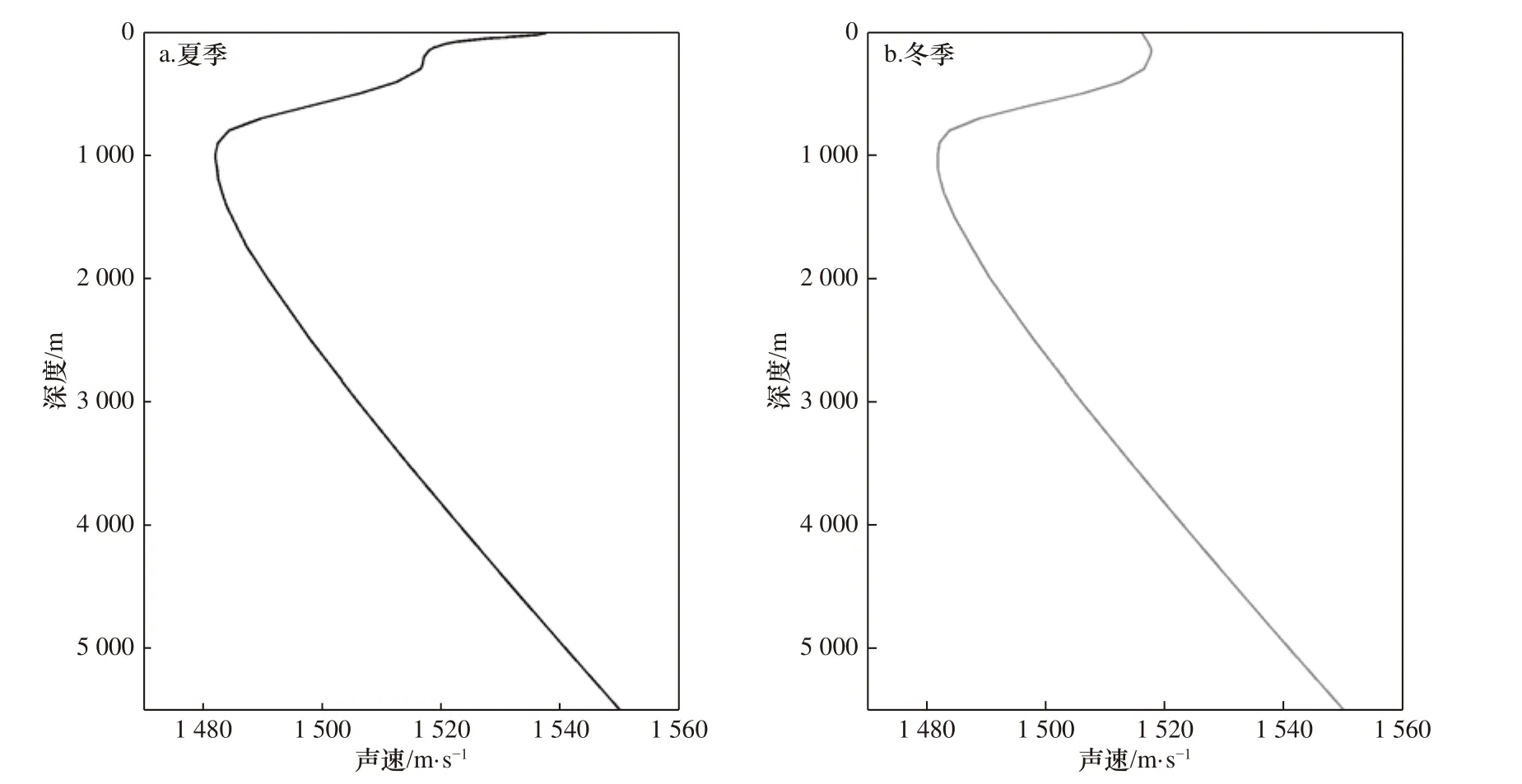
圖2 兩類典型季節的聲速剖面(數據來自WOA09數據集[26-27])Fig.2 The sound velocity profile of two typical seasons (data from WOA09 database[26-27])
采用BELLHOP高斯束射線模型[29-30]計算聲場。與簡正波模型(如Kraken)或拋物方程模型(如MMPE)相比,射線模型的主要優勢是能夠清晰描述不同環境條件下的本征聲線路徑差異,并可直接計算到達時延,適用于本文所討論的問題。聲場計算參數設置如下:垂向計算范圍為海面至海底,間隔20 m,水平計算范圍為0~30 km,間隔0.1 km;聲系統中心頻率取 1 kHz;掠射角范圍設為 0.1°~89°,間隔 0.18°;海底條件設為深海黏土型底質,根據Hamilton地聲學經驗參數表[31]對其主要參數進行取值,密度為1.352 g/cm3,壓縮波聲速為1 503 m/s,衰減系數為0.12 dB/λ。
圖3為根據BELLHOP模型得到的夏季和冬季傳播損失場(根據圖2中的聲速剖面計算),聲壓通過全相干方式疊加。根據圖3,夏季為無表面波導的會聚區聲場,聲信道中的亮區與影區邊界相對分明,亮區主要為直達波攜帶的聲能,影區主要為海面-海底邊界反射、散射的聲能;冬季為有表面波導的會聚區聲場,近海面由混合層提供了一個數十米至上百米厚的表面波導層,該層之下的亮區與夏季相近,影區中主要包括海面-海底邊界反射的聲能以及表面波導泄漏的少量聲能。
為考察在不同接收深度(Receiving Depth, RD)的目標聲信號到達特性,選取50 m、500 m、5 400 m作為海洋近表層、海洋中上層、海洋近底層的代表性深度。比較夏季和冬季傳播損失曲線(圖4)可以看出,當接收器位于海洋近表層時,夏季和冬季環境下呈現出兩種不同的聲場樣式,夏季由季節性溫躍層主導,僅有小范圍聲能較高的區域,冬季由表面波導主導,聲能相對較高區域的作用距離明顯擴大;當接收器位于海洋中上層時,亮區和影區有較大差異,從亮區過渡到影區后傳播損失增加約30 dB,其過渡區的位置和范圍在夏季和冬季有明顯的變化,同時也與收-發條件有關;當接收器位于海洋近底層時,接收器始終處于直達波作用距離內,傳播損失相對較小,在30 km的傳播距離上仍能維持不超過90 dB的傳播損失。上述分析表明,聲傳播損失約束了目標聲信號直達波的作用距離,使得在不同接收深度聲能隨距離的衰減變化情況各異,而海洋上層受季節性環境變化的影響極為明顯。
4 環境變化對聲傳播影響分析
4.1 到達聲路徑
目標聲信號沿多途聲路徑傳播到接收器,可由一系列按先后次序到達的本征聲線描述。最先到達的是僅在海水中折射沒有邊界反射的直達波聲路徑(記為RR),其次是僅經歷一次海底反射作用的一次海底反射波聲路徑(記為RB),再次是在海面-海底各經歷一次反射作用的反射波聲路徑,后續則是海面-海底之間的多次反射波聲路徑。當近表層存在混合層時,還存在一類僅通過折射和海面反射向前傳播的表面波導聲路徑(記為SD)。圖5給出了接收器位于海洋近表層(RD=50 m)、海洋中上層(RD=500 m)、海洋近底層(RD=5 400 m)3種條件下的典型本征聲線比較。由于聲傳播路徑與聲速剖面結構直接相關,因此海水環境條件的季節性改變必然對目標聲信號到達的信噪比、時延等要素產生影響。
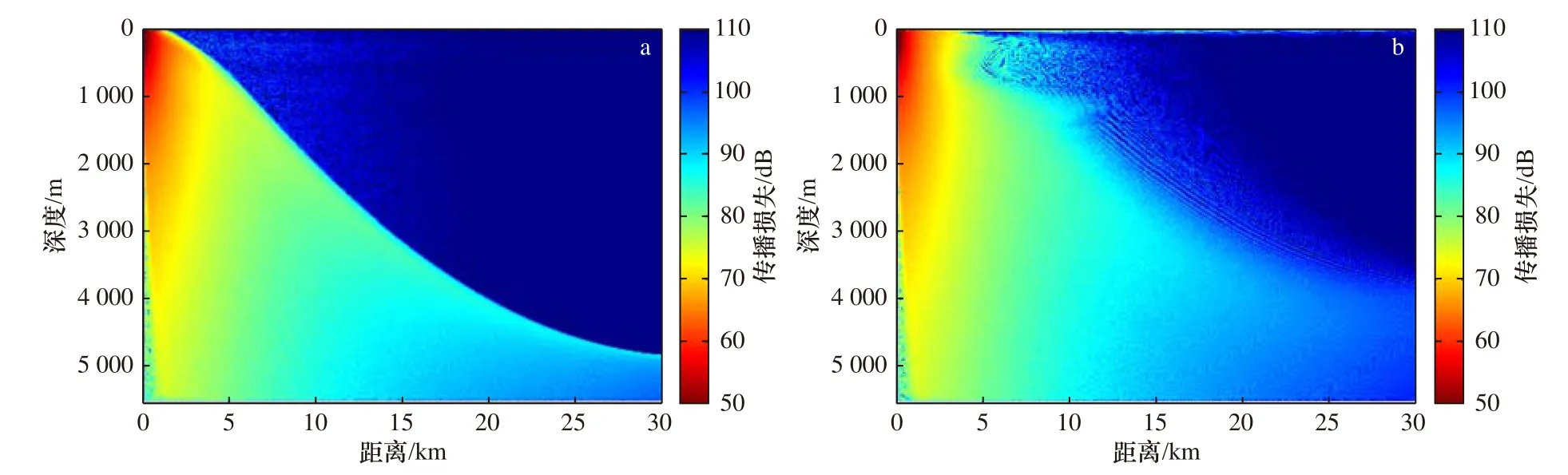
圖3 夏季(a)與冬季(b)傳播損失場Fig.3 Transmission loss in summer (a) and winter (b)
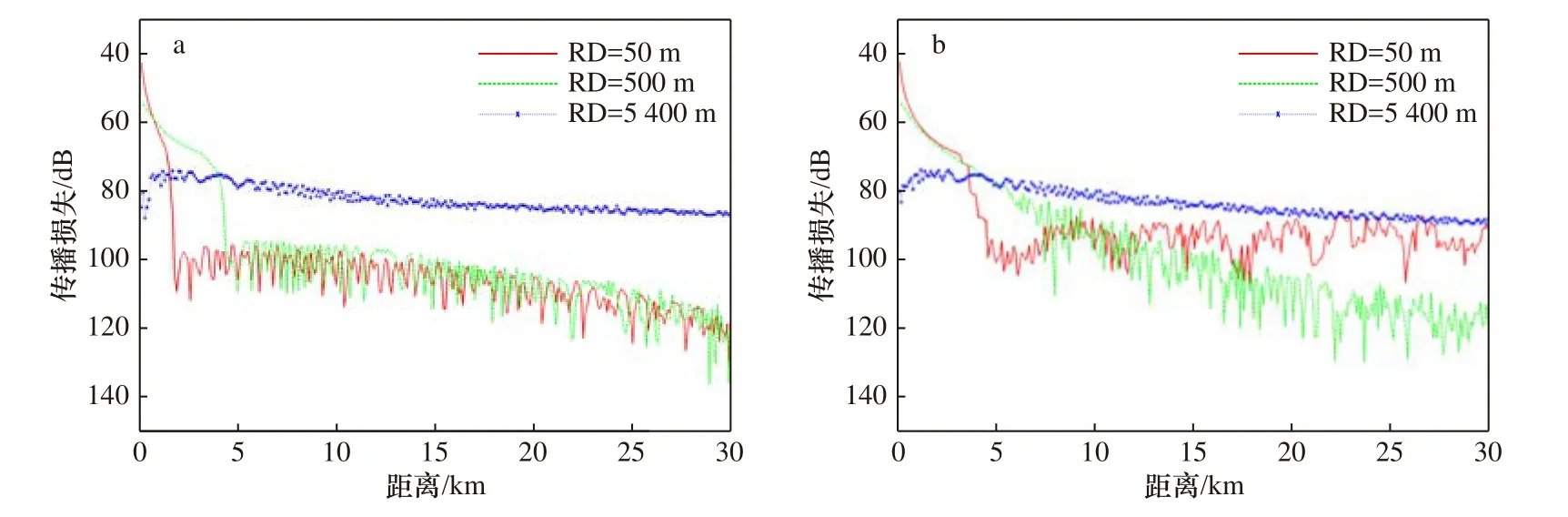
圖4 典型接收深度的夏季(a)與冬季(b)傳播損失曲線Fig.4 Transmission loss curve in typical receiving depth in summer (a) and winter (b)
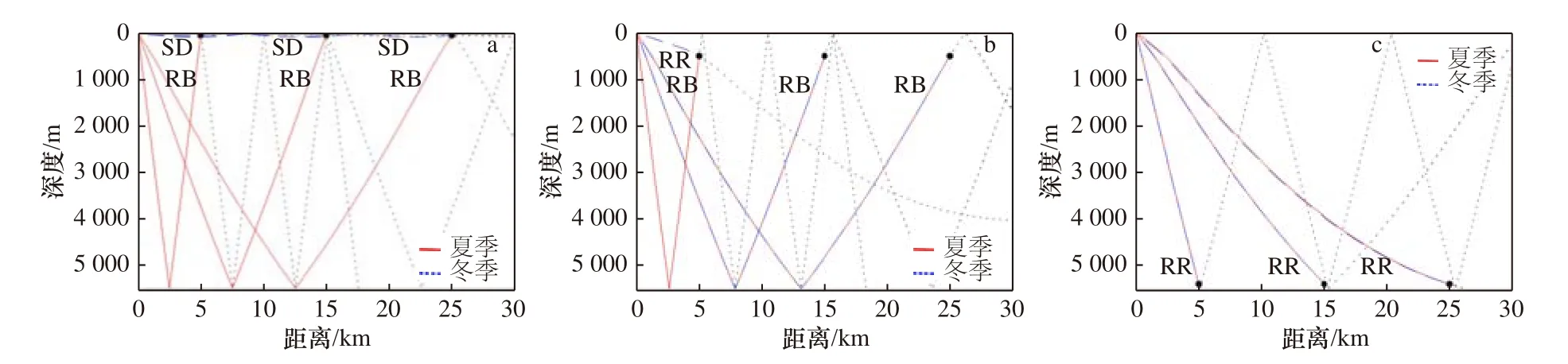
圖5 不同接收深度條件下的本征聲線比較Fig.5 Comparison of eigen-rays in different receiving depth
4.2 信噪比
直達波具有信噪比高、到達時延短、時延誤差小等優勢,是最重要的定位信息源,其次是一次海底反射波。對于一定的收-發條件,能否可利用直達波提取有效的測量信息,先決條件是到達的目標聲信號有足夠的信噪比。以下根據式(1)及BELLHOP模型計算的聲場得出了前文選取的3個典型接收深度條件下的信噪比曲線(圖6),為開展多途信息的討論,以下針對直達波和一次海底反射波分別進行了計算,聲源級SL取200 dB,接收深度為50 m、500 m、5 400 m的背景噪聲NL分別取75 dB、70 dB、60 dB,檢測閾DT取10 dB,上述各項均為譜級(1 kHz)。當接收深度位于50 m時,夏季直達波的作用距離小于2 km(按上述環境條件計算),而冬季由于該接收深度處于表面波導作用范圍,使得相對較高的信噪比可覆蓋全部測量海區(基站間最大距離為22.6 km)。在上述兩種情況中,一次海底反射波的作用距離均為25 km以上,季節性變化不明顯。當接收深度位于500 m時,從會聚區聲信道的亮區到影區,信噪比將經歷顯著下降的過程,兩個區域邊界有明顯的季節性變化,夏季因存在較強的季節性溫躍層,導致上層海洋的直達波聲路徑作用距離受限,直達波作用距離小于5 km(按上述環境條件計算);而冬季混合層環境代替季節性溫躍層后整個聲場發生了變化,更多的聲能到達海洋中上層,直達波作用距離增加到15 km以上。當接收深度位于5 400 m時,兩類多途聲路徑作用距離季節性變化很小,直達波聲路徑為可靠聲路徑,在整個測量海區內均可保持較高的聲級,比一次海底反射波高出15 dB以上。
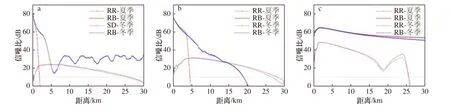
圖6 不同接收深度條件下的信噪比隨距離變化曲線比較Fig.6 Comparison of signal to noise ratio curve with range under different receiving depth conditions
根據上述分析,對于接收器位于海洋上層的情況,直達波作用距離總是有限的,如果要實現對整個測量海區的覆蓋,必然要用到一次海底反射波的信息。文獻[25]報道了近年來利用一次海底反射波進行無源目標被動測距的工作,驗證了一次海底反射波可為深海影區內的水聲探測提供重要信息。此類信息可用的前提條件是要有足夠的信噪比,本文僅考慮一次海底反射波可利用的情況,而對于目標聲源級較小、在深海環境下難以被檢測到的情況暫不討論。
4.3 到達時延
由于存在RR、RB、SD等到達聲路徑的差異,聲到達時延也必然隨之產生相應的響應變化。圖7給出了3個典型接收深度條件下的到達時延隨距離變化曲線。當接收器位于海洋近表層和中上層時,沿一次海底反射波聲路徑的到達時延明顯大于直達波聲路徑,時延差在距離目標數千米范圍差值超過5 s,隨著傳播距離增加或接收器深度增加逐漸減小。這就意味著,在亮區中的接收器最先接收到沿直達波聲路徑傳來的聲信號,數秒后一次海底反射波信號才能到達,而在影區則只能接收到沿一次海底反射波聲路徑傳來的聲信號,在圖7中表現為到達時延在直達波作用距離邊界處出現一定程度的“跳變”,而兩類聲路徑的時延差隨距離增加而逐漸減弱。當接收器位于海洋近底層時,直達波聲路徑與一次海底反射波聲路徑差別很小。
5 環境變化對定位性能影響分析
海洋環境與聲傳播特性相關聯,環境變化必然對聲定位性能產生影響。以下結合前文的工況和模型設計一種仿真分析方法,用以討論定位性能對季節性環境變化的響應。
5.1 誤差源
目標聲信號在經歷聲信道傳播以及接收器信息采集、處理、估計等過程中伴隨著誤差傳遞,假設誤差源主要有以下4類。
(1)基站站址誤差:各基站位置坐標的標定誤差。對于水面基站,為克服接收器在海流作用下的擺動,利用水面平臺獲得的衛星導航定位信息以及水面平臺與接收器之間的超短基線定位信息,對接收器位置進行實時修正,該項技術已在深海潛器對接中得到驗證(精度優于米級)[32]。根據現有設備能力,將衛星導航定位誤差設為1 m,接收器標定的水平誤差設為1%斜距(水面平臺正下方±60°區域內),兩者累加后接收深度為50 m和500 m的水平站址誤差分別為1.5 m和6 m;接收器在垂直方向的位置主要由深度-壓力傳感器提供,根據現有設備能力將垂向誤差設為0.2%水深,接收深度為50 m和500 m的垂向站址誤差分別為0.1 m、1 m。對于水下基站,由于接收器在海底附近受海流影響較小,站址誤差主要為基站布放的標定誤差。根據現有深海潛標類設備標定能力,將水平誤差設為0.5%斜距,接收深度為5 400 m的水平站址誤差為27 m;垂向站址誤差根據深度-壓力傳感器能
圖7 不同接收深度條件下的到達時延隨距離變化曲線比較Fig.7 Comparison of time delay curve with range under different receiving depth conditions

式中,B為信號帶寬;T為信號持續時間。
時延估計誤差標準差的CRLB通常為O(1 μs)~O(10 μs)量級。在實際應用中,在高信噪比條件下采用高精度信號處理方法(如相關峰細化法、兩步法等)可將時延估計精度控制在數倍CRLB的水平[36],遠小于聲起伏時延誤差的O(10 ms)量級。根據本文設定的條件,可按工程經驗將時延估計誤差標準差στe設為10倍CRLB,其量值在半會聚區范圍小于1 ms。
(4)基站同步誤差:基站布設后的時鐘漂移誤差。考慮各基站在布放前完成時間同步,12 h內完成測試回收,按現有設備守時穩定度估計,時間漂移誤差為O(1 μs),相對于以上兩類時延誤差可忽略。
5.2 仿真算法
為了將上述誤差源有效迭加到聲定位結果中,以下參照文獻[16]建立基于Monte-Carlo方法的仿真算法。
(2)聲到達信息計算:將聲速剖面作為已知信息分別計算直達波聲場和一次海底反射波聲場,求取目力設為0.2%水深,接收深度為5 400 m的垂向站址誤差為10.8 m。
(2)聲起伏時延誤差:測量海區內聲起伏或聲速隨距離非均勻變化引起的到達時延誤差。聲信號在海水中的傳播有一定的隨機性,在時間上表現為實時起伏變化,在空間上表現為三維非均勻分布。對于本文討論的半會聚區尺度,選取一組測量海區中心附近5°×5°區域同季節的Argo剖面(剖面數99組,數據來自全球Argo數據集[33])模擬實時聲速剖面相對于氣候態平均結構的波動變化(Argo剖面采樣的下界通常小于2 000 m,其深海部分的環境數據依據WOA09數據按文獻[34]提出的方法插補)。經統計分析,從海面至50 m、500 m和5 400 m 3個典型接收深度的平均聲速標準差分別為4.8 m/s、3.1 m/s和1.2 m/s。根據誤差傳播理論,對于 τ =r/c,則有其中 δτ和 δc分別為時延誤差和聲速誤差,即聲起伏引起的時延誤差隨傳播時延增加而增大,其變化速率為聲速誤差與等效聲速的比值,可按對聲速起伏時延誤差標準差進行估計,其中 σc為聲速標準差。
(3)時延估計誤差:根據接收器獲取的目標聲信號,采用一定的信號處理方法得到到達時間估計值的誤差。時延估計誤差與信噪比相關,其標準差的Cramer-Rao 下限(CRLB)滿足[35]:標到基站的本征聲線,并根據聲吶方程約束兩類到達波的作用距離;提取到達時延真值 τtj和等效聲速真值ctj,構成到達時延真值向量Tt=[τt1,τt2,···,τtN]T和等效聲速真值向量Ct=[ct1,ct2,···,ctN]T(N為有效基站數)。
(4)目標位置迭代求解:估計初始位置X0,計算初始位置到基站的斜距向量并求取兩點間的本征聲線,提取到達時延初始值向量和等效聲速初始值向量建立測量值和初始值的時延差向量其中以等效聲速初始值近似等效聲速估計量,根據公式(5)、(6)代入ΔTm求解目標位置的估計量,并在下一次迭代中代替X0作為初值,按上述步驟重復計算,直至停止迭代,此時的即為該次抽樣中的目標位置測量值。
(5)重復抽樣與統計量計算:經過1 000次抽樣后,形成目標位置測量值序列(M為有效抽樣數),再計算均方根誤差(RMSE),其中為第i次抽樣的目標位置測量值。
5.3 仿真結果分析
以下設定一個具體場景對定位性能受季節性環境變化的影響方式進行討論。假設入水點水平位置坐標(x,z)為(2, 2)(單位為 km,下同),1#~5#基站水平位置坐標分別為(0, 0)、(-8, 8)、(-8, -8)、(8, -8)和(8, 8),各基站與入水點的水平距離分別為2.83 km、11.66 km、14.14 km、11.66 km和8.49 km。
若按前文描述的工況條件,海洋近底層的接收器均可由可靠聲路徑進行定位,而海洋近表層和海洋中上層的接收器則需要根據信噪比條件判斷到達的是直達波聲路徑還是一次海底反射波聲路徑。對于接收深度為500 m的情況(信噪比分布見圖8a和圖8b),在夏季季節性溫躍層影響下直達波作用距離為4.5 km,只有1#基站位于直達波作用距離之內,而其他4個基站均位于直達波作用距離之外,需利用一次海底反射波定位;而冬季季節性溫躍層被混合層取代后直達波作用距離擴大到19 km,5個基站均可利用直達波定位,但基陣4個頂角處的基站可獲得的信噪比明顯低于基陣中心的1#基站。對于接收深度為50 m的情況(信噪比分布見圖8c和圖8d),夏季直達波作用距離相對于接收深度為500 m時縮小到1.9 km,5個基站均位于直達波作用距離之外,僅能利用一次海底反射波定位;而冬季由于接收深度位于混合層內,可利用經由表面波導到達的目標聲信號進行定位,在X-Z平面上信噪比呈環帶狀分布,距入水點中心約4 km的區域內信噪比超過40 dB,超出這一距離后逐漸下降至20~30 dB。比較上述3種情況發現,季節性海洋環境變化改變了聲信道樣式和聲到達路徑,在不同收-發條件下產生了不同的定位信息和解算條件。
對不同接收器深度條件下的定位進行仿真模擬,得出夏季和冬季兩類典型環境下的定位統計結果。圖9給出了接收深度為500 m時夏季和冬季環境下迭代解算過程中的定位偏差箱型圖,圖中每次迭代的統計特性由箱型分布顯示,其上沿和下沿分別表示0.25和0.75分位數,中間線表示中值。由圖9可見,定位偏差中值從最初超過200 m經過3~5次迭代后下降到數十米的量值,體現出快速收斂的特性,但夏季和冬季條件下收斂速度和最終的定位性能有所差異,冬季定位性能優于夏季。圖10顯示了單次抽樣的時差交會定位示意圖,可以看出偏差較大的初值位置經過迭代后收斂到二次曲線交會點的“中心”位置附近,這個“中心”是由最小二乘法給出的誤差極小值點(即測量值),與到達各基站的模擬時差測量值相匹配。而目標真值與測量值的偏差則體現了各項誤差傳播和迭加的結果。
表1匯總了不同情況下的定位精度仿真結果,考慮到接收器在不同接收深度有著不同的站址誤差量級,為了更清晰地比較環境因素對定位性能的影響,表中區分了迭加站址誤差和未迭加站址誤差兩種情況,后者可視為非站址因素主導的相對誤差。對應的目標聲信號到達1#~5#基站的主要聲路徑類型和到達時延(真值)則由表2給出。
對于接收器位于500 m的情況,定位性能出現較明顯的季節性變化。根據目標聲信號到達參數(表2),夏季用于定位解算的主要為一次海底反射波聲路徑(只有1#基站為直達波聲路徑),RMSE為40.0 m,而冬季聲信道條件下直達波作用范圍明顯增加,用于定位解算的全部為到達時延更短、信噪比更高的直達波聲路徑,定位性能明顯提升,RMSE為21.6 m,相對于夏季的情況減小了18.4 m。
圖8 夏季和冬季信噪比水平分布比較Fig.8 Comparison of signal to noise ratio horizontal distribution in summer and winter
圖9 夏季(a)和冬季(b)環境下迭代解算中的定位偏差箱型圖(RD=500 m)Fig.9 Box-plot of localization bias in iteration under summer (a) and winter (b) environment(RD=500 m)
對于接收器位于50 m的情況,定位性能出現的季節性變化更加顯著。根據目標聲信號到達參數(表2),夏季由于近表層受季節性溫躍層影響,直達波作用距離小于2 km,即使是距目標數千米距離的基站也只能依靠一次海底反射波提供的聲信息進行解算,時延誤差大且信噪比低,RMSE達到85.1 m,與同季節接收器位于500 m時的情況相比RMSE增加超過1倍。而冬季聲信道條件變為表面波導,到達信噪比有明顯改進,其聲路徑趨近于直達波,定位性能顯著提升,RMSE為32.7 m,相對于夏季條件大幅減小,在量值上介于接收器位于500 m時夏季與冬季環境下的RMSE之間。
圖10 時差交會解算示意圖(RD=500 m)Fig.10 Illustration of time difference intersection and solution (RD=500 m)
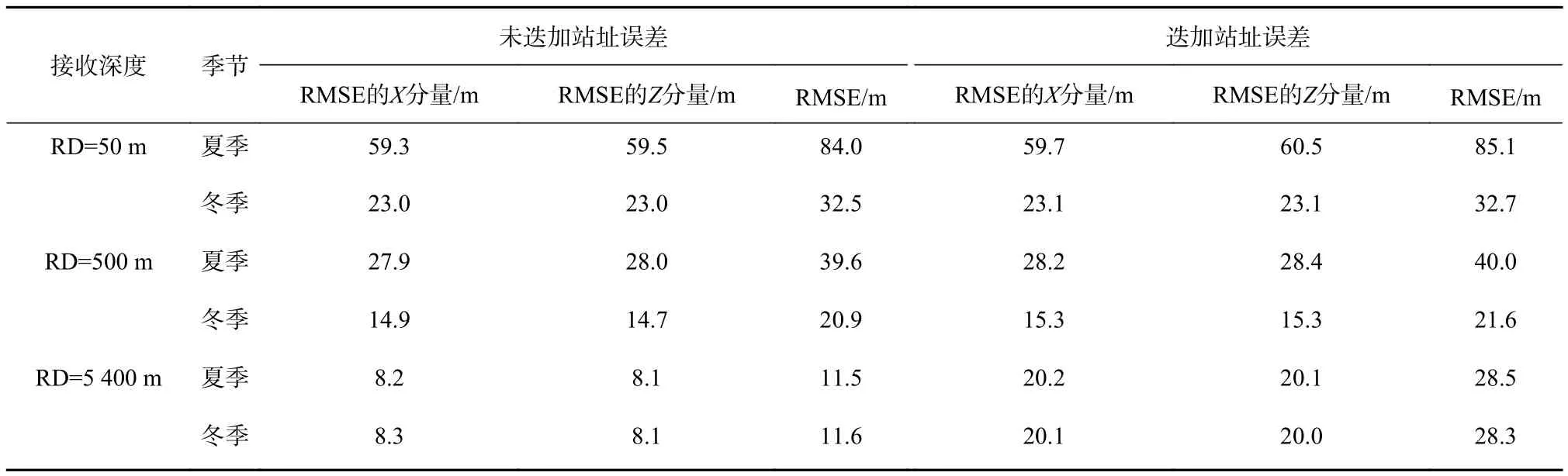
表1 不同接收深度夏季和冬季環境下的RMSE比較Table 1 Comparison of RMSE in different receiving depth under summer and winter environment
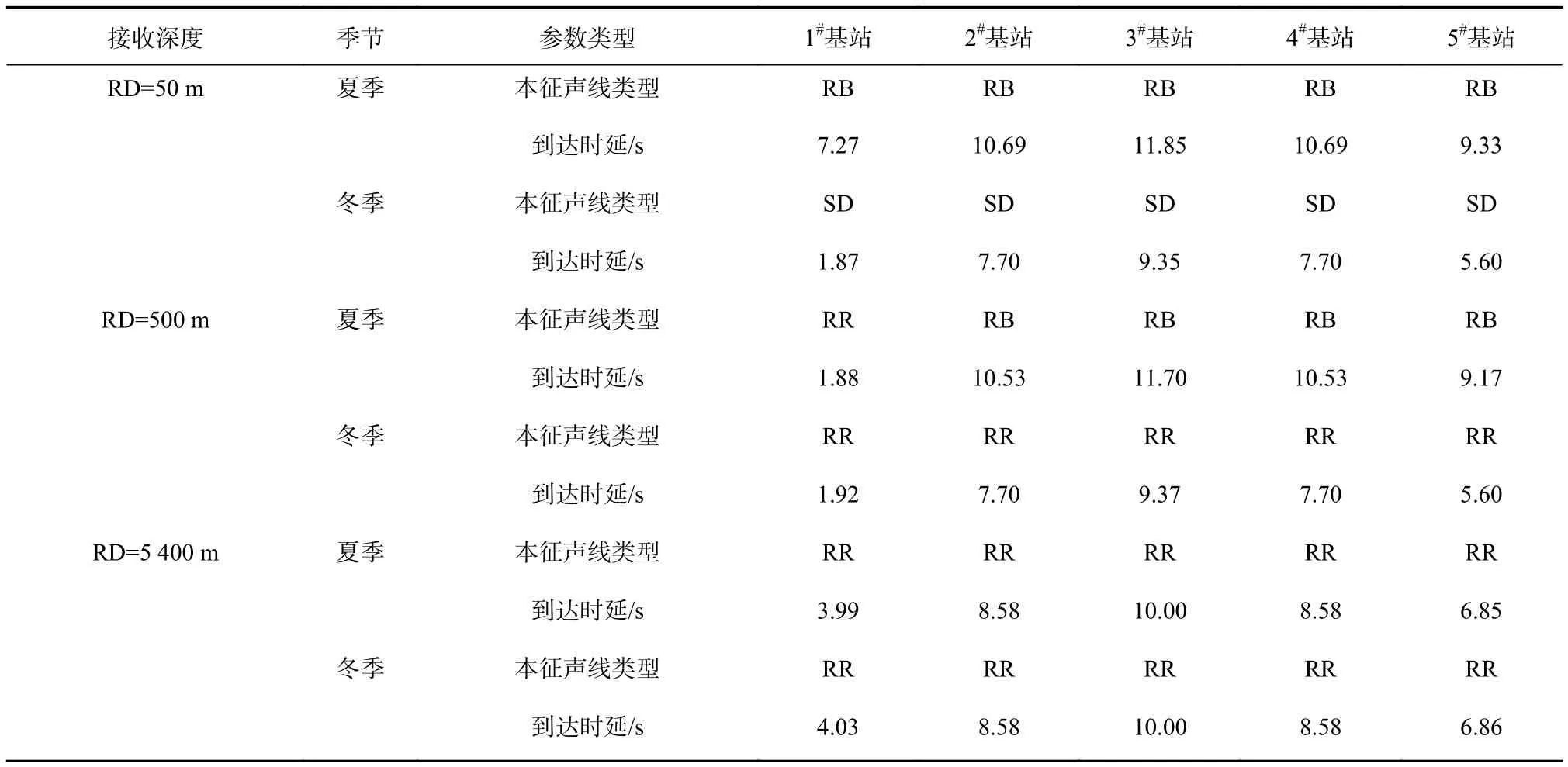
表2 目標聲信號到達各基站參數比較(真值)Table 2 Comparison of arrival parameters to each base station (the truth value)
對于接收器位于5 400 m的情況,夏季和冬季的定位性能非常接近,RMSE分別28.5 m和28.3 m。這是因為,到達各基站的目標聲信號均沿可靠聲路徑傳播,具有高信噪比、低時延誤差的特性,因此是定位精度相對較高、性能較穩定的一類定位方式。特別是在不考慮站址誤差條件下,RMSE小于12 m,其相對精度明顯高于接收器位于海洋近表層和中上層的情況;在迭加了相對較大的站址誤差后,其RMSE仍優于接收器位于500 m夏季環境下的結果,但不及接收器位于500 m冬季環境下的結果。迭加站址誤差和未迭加站址誤差兩種情況下的RMSE差異相對較大,說明該仿真方法對近海底基站站址誤差較大的預設條件有所響應。
盡管水下基站在相對精度方面優于水面基站,但從工程應用的角度考慮,水面基站在海上作業、快速解算等方面更有優勢。由于深海保障條件有限,在大范圍海區對近海底平臺進行布放、標定和回收等作業相對困難。水面基站獲取的聲到達信息可直接利用無線電通信回傳到中心站解算;而水下基站獲取的信息則需要先通過水聲通信方式傳到水面基站,再回傳到中心站解算。
6 結論
海水的物理狀態對聲信道有直接影響,利用聲信道進行水聲定位其性能必然受到環境變化的影響。本文針對在深海半會聚區尺度海區對航行體入水點進行無源聲定位的問題,提出一種評估海水環境條件對定位性能影響的仿真方法。選取西太平洋中緯度海域的冬季和夏季水文剖面作為代表性場景,應用BELLHOP模型計算聲場并依據信噪比判定目標聲信號到達路徑并約束探測邊界,以50 m、500 m、5 400 m作為海洋近表層、海洋中上層、海洋近底層的典型接收深度,將高斯束射線分解為直達波、海底反射波等不同類型的本征聲線路徑分別計算信噪比和到達時延,代入時差定位模型并迭加誤差,通過分析不同海洋環境、不同收-發條件下定位性能的變化情況討論季節性環境影響機制。
通過仿真分析主要得出以下認識:(1)當接收器位于海洋近表層時(RD=50 m),聲信道在夏季和冬季呈現出兩種不同的樣式,定位性能差異顯著,夏季季節性溫躍層環境下主要依靠一次海底反射波定位,定位精度較差,冬季混合層環境下主要依靠表面波導定位,定位精度相對較高,兩者RMSE相差超過50 m;(2)當接收器位于海洋中上層時(RD=500 m),聲信道和聲到達特性有明顯的季節性變化,冬季直達波作用范圍較大,定位精度較高,夏季直達波作用范圍受限,定位精度較低,兩者RMSE相差15~20 m;(3)當接收器位于海洋近底層時(RD=5 400 m),主要利用可靠聲路徑定位,定位精度較高,季節性變化不明顯。上述結果表明,在測量設計和評估中應充分考慮多樣性環境條件對聲系統實際使用效能帶來的影響,提高工程應用的環境適應性和寬容性。
在深海多樣性環境條件下考慮入水目標的聲定位測量問題,面臨很多新的問題和挑戰。本文通過數值仿真的方法初步探討了典型深海區域夏季和冬季兩種環境模態對中小尺度海區定位測量的影響機制問題,雖得出了一些結果,但在海洋聲信道的不確定性、聲系統的技術細節、測量基陣的優化設計等方面的認識還不夠深入,此外關于定位特性的空間分布規律問題也未討論。由于開展深海測試海上作業保障條件比淺海困難更大,此類工況的實際應用將是一個復雜的系統工程問題,在測量方案、測量系統的論證設計方面仍有待進一步研究,同時相關海上實驗驗證工作也迫切需要開展。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
