海洋短排列多道反射地震數據觀測系統重定義與沉放深度校正
2020-05-22 09:49:58張圣高金耀丁維鳳沈中延刁云云
海洋學報 2020年3期
張圣,高金耀*,丁維鳳,沈中延,刁云云
(1.自然資源部第二海洋研究所 海底科學重點實驗室,浙江 杭州 310012)
1 引言
短排列多道地震勘探廣泛應用于近海工程地質調查、油氣平臺的井場調查和相關海域的環境調查。與常規油氣勘探中的長排列二維地震勘探相比,其具有靈活操作性和剖面高分辨率特點,調查成果能夠有效識別淺薄地層、小斷層等尺度較小的地質體和構造特征,可有效劃分淺部地層的空間分布等[1-3]。在海底淺層地質災害識別中,短排列多道地震勘探成果能夠有效識別海底的淺部斷裂、滑坡、淺層氣泄漏等災害性地質現象,為工程地質研究提供可靠的資料[4]。
海上多道地震勘探中,等浮拖纜的水下姿態對地震信號反射信息的有效接收至關重要,實際工作中一般通過水鳥來控制拖纜的姿態及位置。水鳥設備在海上地震勘探中非常重要,能有效控制接收拖纜的沉放深度、羽角、位置等信息,便于地震處理時確定各檢波點的位置及姿態數據,為后續數據處理提供可靠的觀測系統參數[5-7]。但近岸高分辨率多道地震勘探因勘探目的層的深度以及作業船只和作業海域環境等因素影響,一般采用24道短排列拖纜,為方便野外工作,接收拖纜上一般不安裝水鳥,這給短排列接收拖纜的定位與定深帶來不利,會造成拖纜不同接收道的實際位置及沉放深度無法控制,影響野外觀測系統定義及靜校正,給后續數據處理帶來諸多困擾。
觀測系統定義直接影響反射地震數據的采集和處理結果質量,尤其是數據處理中的共中心點(CMP)道集抽道運算。準確的觀測系統設置不僅可以提高地震數據的分辨率,還可以有效提高數據成果的信噪比。無水鳥情況下,常規處理基于理想狀態下的直線假設定義觀測系統,該方法無法獲得拖纜及檢波點的實際位置信息,影響CMP抽道集運算及多次疊加次數計算。同時,在走航調查過程中,排列拖纜受勘探船拖曳力變化,以及海域洋流、海面涌浪與風浪等因素影響,接收纜沉放深度會不一致,且隨著勘探船的航行不斷變化,導致所記錄的反射波旅行時間不遵循理論雙曲線形態,單炮記錄上的海底面反射同相軸扭曲,CMP道集反射同相軸無規律,導致后續的速度分析和疊加處理效果很差。
目前觀測系統定義及拖纜沉放深度校正需要利用水鳥提供的位置和深度信息,對于無水鳥地震反射數據,尚沒有可靠的處理方法。本文基于中國第30次南極科考在羅斯海維多利亞地盆地采集的24道短排列反射地震數據,分析研究無水鳥短排列多道反射地震觀測系統的準確定義,以及拖纜沉放深度非一致造成不同接收道的深度校正問題。
南極羅斯海維多利亞地盆地位于西南極,科考海域在維多利亞地盆地北部的冰舌附近(圖1)。野外地震數據采集為避免海上浮冰影響,采集高質量的反射數據,現場工作時選擇海況較好,海流影響較小的天氣海況下作業,同時為提高工作效率及保障水下儀器的安全,接收拖纜上未安裝水鳥,拖纜尾端系上大浮球(圖2),既可現場瞭望拖纜尾端,又可拉直接收拖纜,工作時“雪龍”船以5 kn的航速直線航行,減小拖纜水平彎曲,盡量保持調查船航跡與拖纜航跡一致。野外作業采集參數見表1。
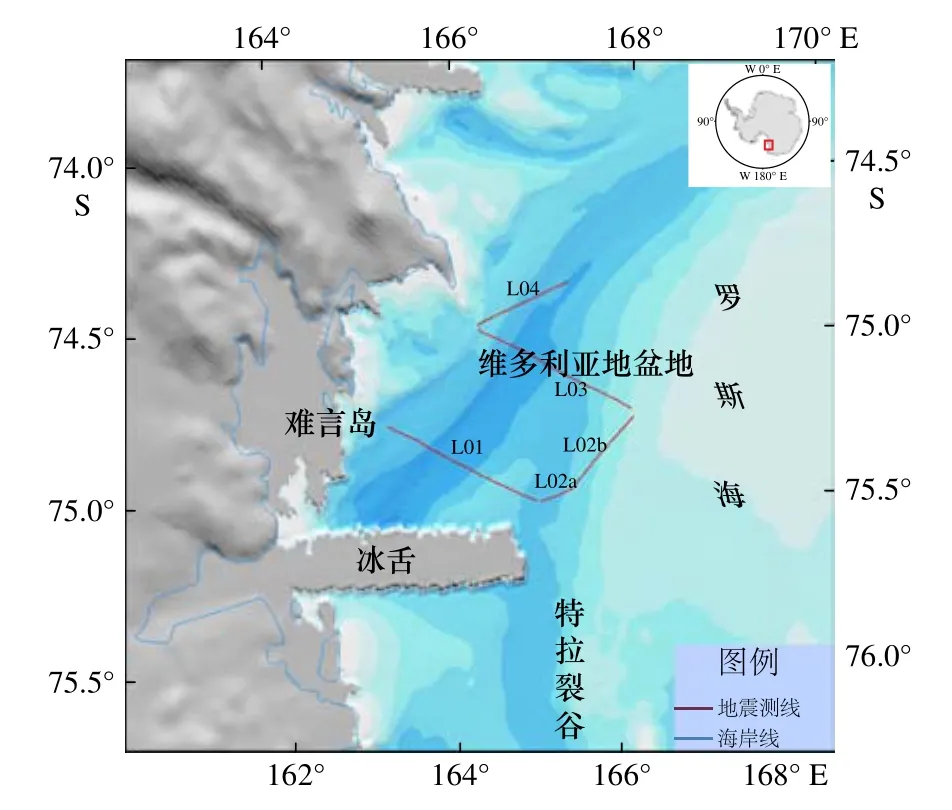
圖1 南極羅斯海地震測線位置Fig.1 The location of seismic line in the Ross Sea
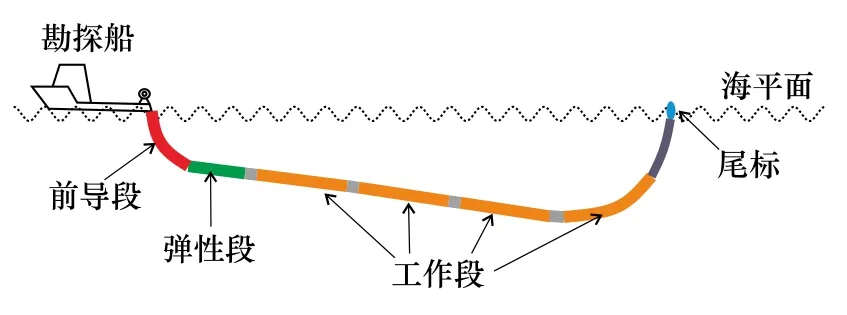
圖2 海洋地震勘探拖纜姿態Fig.2 Towing cable state of marine seismic exploration
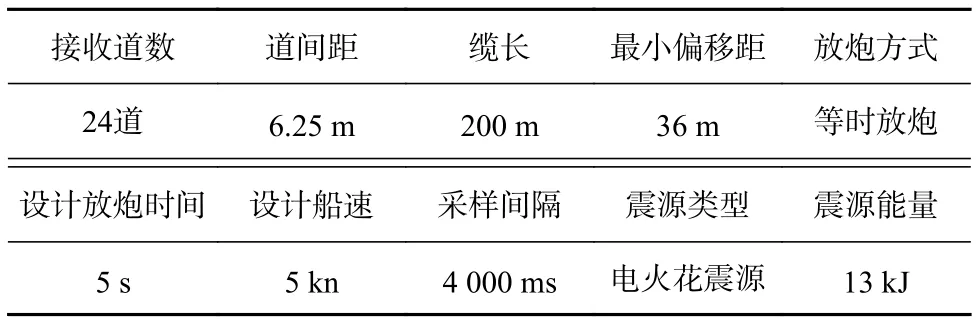
表1 海上地震勘探采集參數Table 1 Acquisition parameters for marine seismic exploration
2 野外觀測系統定義
海上多道地震勘探中,接收拖纜的接收總道數和道間距固定不變,炮間距和最小偏移距一般由野外采集現場試驗確定,數據處理時需要根據野外實際采集情況,首先定義好野外觀測系統參數,重點確定整個排列的最小偏移距、炮間距以及各個接收道的準確位置坐標,最后計算準確的共反射點位置坐標。對于短排列接收拖纜,目前通常采用基于直線假設的常規觀測系統簡單定義方法,針對該方法的使用缺陷,將重點介紹基于實際航跡坐標準確定義觀測系統的方法。
2.1 常規觀測系統
無水鳥控制情況下,若采用直線假設方法,常規觀測系統定義只需計算炮間距及最小偏移距參數且參數是恒定的,再計算各檢波點與激發點的相對距離,最后獲得各共中心點的相對距離。基于直線假設的常規觀測系統(圖3)可以簡單計算出激發點與檢波點相對直線距離。
海上多道地震的調查工作中,通過導航軟件控制震源等時或等距激發,激發點坐標可以經過導航軟件實時記錄。南極位于高緯度地區,GPS沒有差分信號且信號不穩定,定位精度受星態影響較大,無法做到嚴格的等距放炮,同時受浮冰等環境影響及“雪龍”船自身因素,無法嚴格控制船速不變,因此采用等時放炮,盡量控制船速在5 kn左右。利用導航數據文件,發現設定的等時放炮參數,實際記錄文件顯示并未完全等時,加上船速難以控制在恒定,造成實際炮間距并非直線假設中的等間隔放炮,如圖4曲線所示。

圖3 基于直線假設的常規觀測系統Fig.3 Conventional geometry based on linear hypothesis
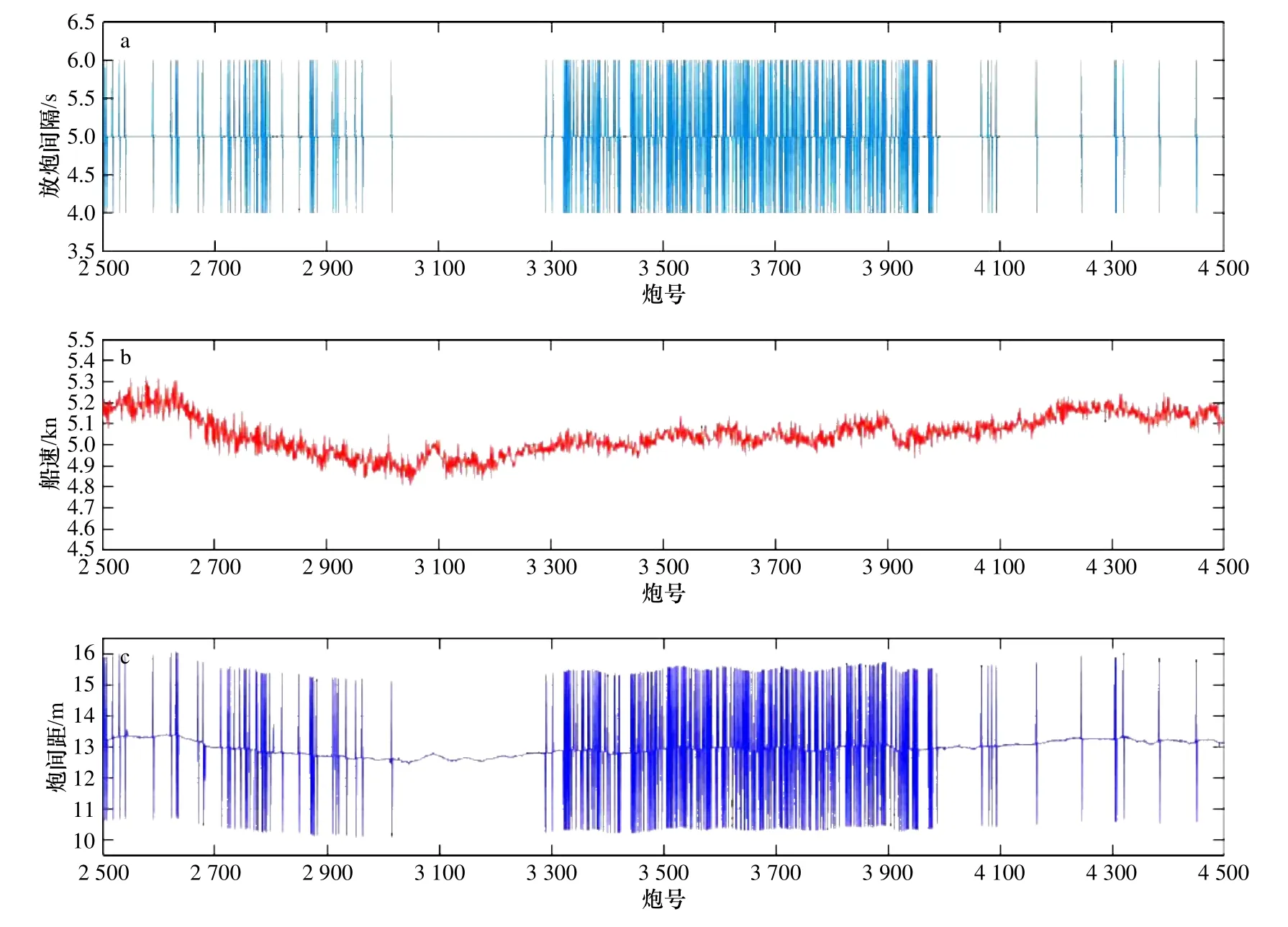
圖4 放炮時間間隔(a)、船速(b)、炮間距(c)隨激發點點號變化曲線Fig.4 Shot time interval (a), ship speed (b) and shot interval (c) curve of source point number
基于直線假設時,假設船以5 kn速度勻速航行,放炮時間導航軟件控制在5 s,計算的炮間距為12.86 m。從圖4中可以看出,實際放炮時間導航軟件大部分控制在5 s,但由于地震采集系統涉及多個子系統,信號傳輸存在時間延遲,以及受時間記錄的精度影響,導致放炮時間存圖中所示的部分4 s和6 s間隔激發。圖中繪制的實際跑航船速也并非恒定的5 kn,而是在4.8~5.3 kn范圍變化。圖4c中的曲線顯示炮間距在13 m左右浮動,放炮間隔偏差較大,最小值只有10.09 m,最大值16.06 m,存在突跳偏差。
2.2 基于導航定位數據重定義觀測系統
為避免常規觀測系統的誤差,考慮到拖纜較短、船速5 kn、海流等外界因素對拖纜水平位置影響較小,可以利用導航數據以及GPS天線與震源的相對空間關系,計算激發點的實際軌跡坐標,模擬拖纜在船尾的拖行軌跡,并獲得檢波點與激發點間的相對空間位置關系,最后可計算出檢波點的實際坐標值。
為有效模擬拖纜在船尾的拖行軌跡,需要首先計算各檢波點同激發點之間的空間位置關系。通過研究分析,本文采用反距離比線性插值算法計算檢波點坐標。該方法基于Tobler定理,根據空間自相關性原理,利用距離權值,近距離的鄰近點,對計算點的相關屬性貢獻值越大;相反,遠距離的鄰近點,對計算點的屬性值貢獻越小[8-9]。利用該方法原理,可以有效計算各檢波點的空間坐標。
2.2.1 計算檢波點與激發點間相對位置關系
海上多道地震勘探時,一般會量取船載GPS天線與船尾震源間的相對位置。有了震源點相對于GPS天線的位置,利用導航定位信息,可以計算出激發點的實時坐標位置,再根據檢波點與激發點的相對位置示意圖(圖5),可以利用下式計算出激發點與檢波點的相對空間位置關系,
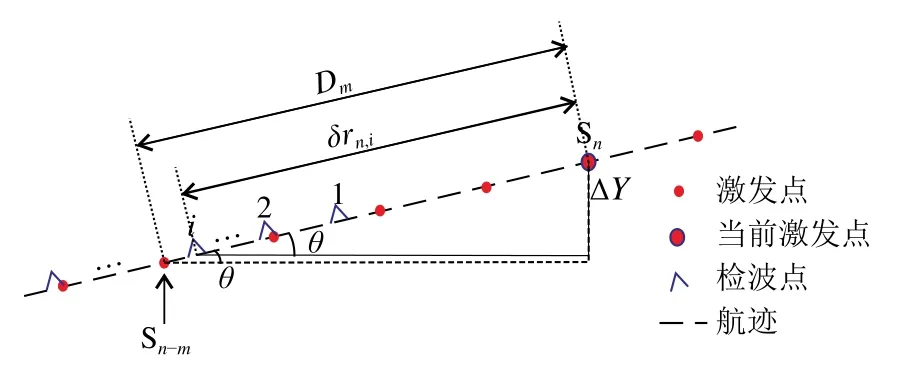
圖5 檢波點與激發點間空間位置關系Fig.5 Spatial position relationship between the receiving points and the shot points
式中,δrn,i是當前炮(第n炮)第i道的炮檢距,可以通過直達波起跳時間確定;m表示離檢波點最近的激發點與當前炮的間隔激發點數;θ表示第i道檢波器與當前激發點的方位角; ΔS表示炮間距;Dm表示m炮間的距離,Dm=mΔS; ΔY表示m炮間Y方向的距離;Yn,Yn-m分別表示兩炮的Y方向坐標,ΔY=Yn-Yn-m。
利用上面公式,可以計算出m和θ兩個參數,并由此獲得檢波點相對于激發點的空間位置,給出檢波點的平面坐標。
2.2.2 計算檢波點坐標
通過式(1)和式(2),可以獲得短排列接收纜隨船拖行的空間形態與檢波點相對方位,模擬的拖纜空間形態與方位同實際會存在一定誤差,為減小誤差,采用鄰近點反距離比線性插值算法,利用多個激發點坐標計算單個檢波點的坐標,利用多點的距離權值插值計算待求點坐標。計算過程需要利用上面計算的空間方位信息,輸入激發點軌跡,通過下式,可以算出檢波點的實際平面坐標值[9],


式中,xrn,i,yrn,i表示檢波點的坐標對;XSn-k,YSn-k表示參與計算的第n-k炮的激發點坐標對;δrn-k,i表示第n-k炮時第i道的炮檢距。
將計算出的所有檢波點和激發點坐標輸入專業處理軟件中,定義野外實際觀測系統參數,抽取測線所有炮集的CMP道集,計算共反射點的疊加次數。
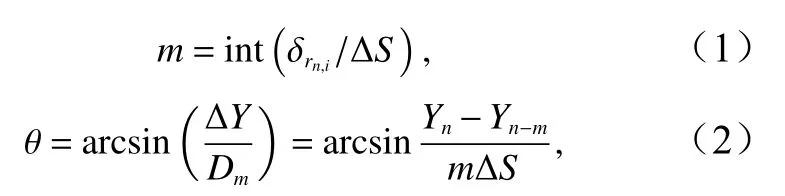
常規觀測系統共反射點為直線關系,疊加次數為5~6次(圖6),是基于理論假設,與海上實際跑航調查不符。基于導航數據重新定義的觀測系統共反射點軌跡與航跡相符(圖7),CMP疊加次數多為4~5次,隨拖纜軌跡及炮間距變化。當炮間距變大時,疊加次數減小,出現部分4次疊加,更符合實際情況。
3 拖纜沉放深度校正
如何處理好因拖纜沉放深度的變化導致檢波點不在同一深度平面上,可以參考陸地地震勘探中的靜校正問題。如圖8所示,對采集的反射地震數據,需要進行類似圖中因拖纜變化而引起的檢波器深度不一致校正問題[10]。
為完整考慮多道地震排列因激發震源及接收拖纜兩者的深度變化,改正記錄信號的反射形態突變,實際處理中,我們從共中心點道集和共炮檢距道集記錄以及水深改正[11]3個方面進行排列靜校正處理,達到完全改正反射信號的旅行時誤差,還原有效反射信號的理論時距曲線關系。
3.1 共中心點道集靜校正
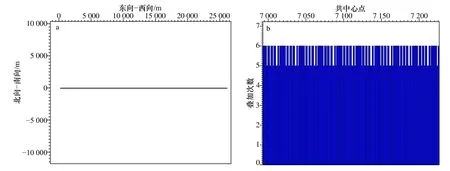
圖6 基于直線假設定義的觀測系統共反射點軌跡(a)與疊加次數(b)Fig.6 Common reflection point trajectory (a) and the stacking fold (b) of the geometry defined by linear hypothesis
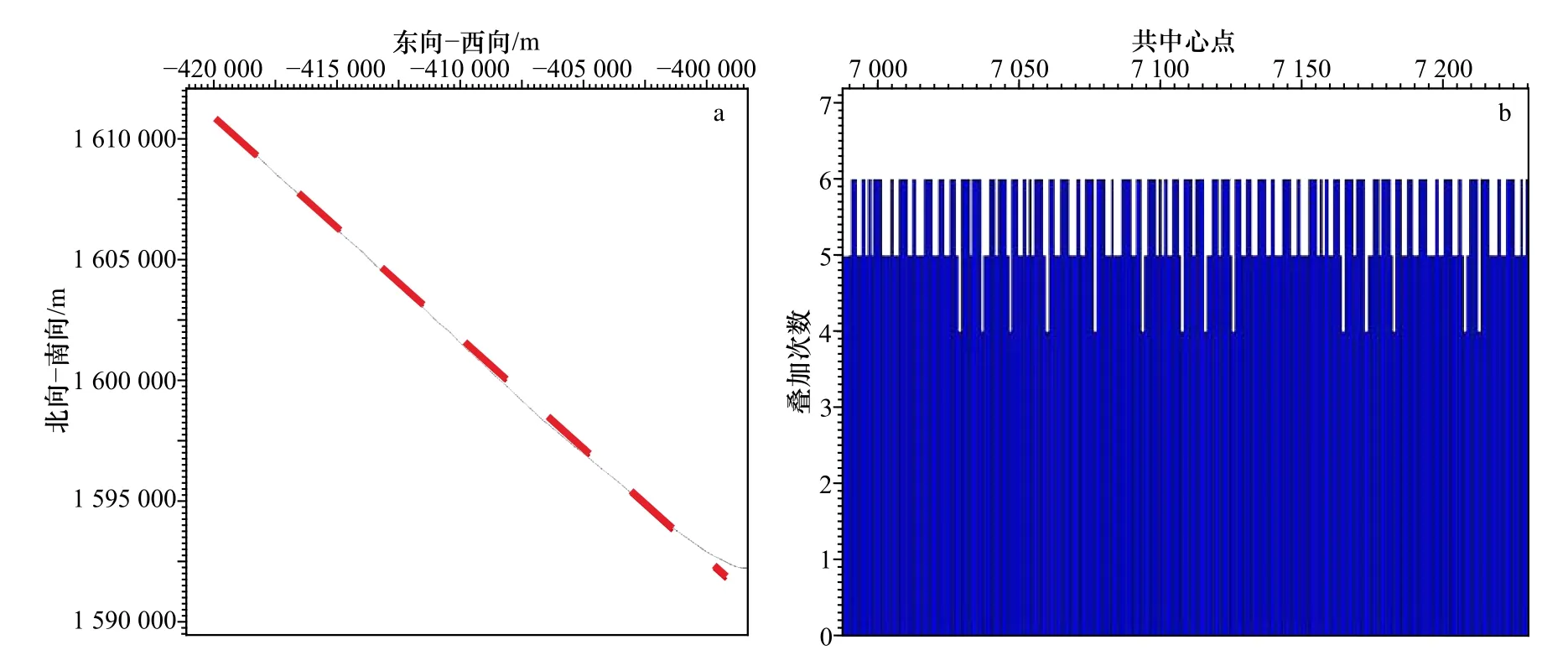
圖7 基于導航數據定義的觀測系統共反射點軌跡(a)與疊加次數(b)Fig.7 Common reflection point trajectory (a) and the stacking fold (b) of the geometry based on navigation data
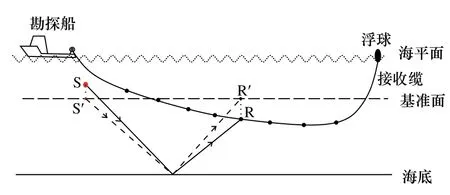
圖8 海洋地震勘探基準面靜校正Fig.8 Datum static correction of marine seismic exploration
將共中心點道集第一道的海底反射時間作為基準點,如圖9所示,計算共中心點的理論時距曲線時間參數,并將其他所有道集的海底面反射校正到海底理論反射時間位置。利用式(5)和式(6)[10],校正所采集的多道地震數據,在式(5)中已考慮到地層傾角θ,因此,自動按傾斜地層進行校正。獲得圖10所示的對比結果。
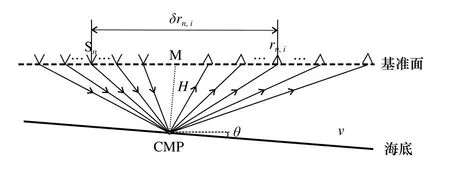
圖9 海洋地震勘探CMP地震波傳播示意圖Fig.9 Schematic diagram of theoretical seismic wave propagation
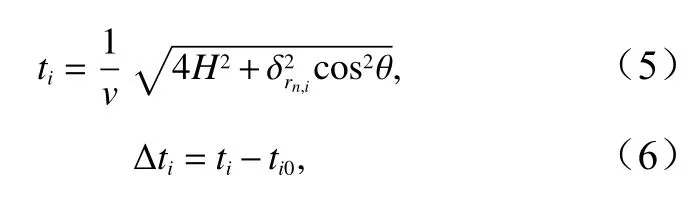
式中,ti、ti0、 Δti分別表示第n炮第i道檢波點海底同相軸的理論雙程旅行時、記錄雙程旅行時、靜校正量;H表示當前共中心點水深值; δrn,i表示當前檢波點炮檢距;θ表示當前共中心點處地層傾角;v表示地震波在介質中的傳播速度,采用當前水層的平均速度,根據實測或者公開的聲速資料獲得。
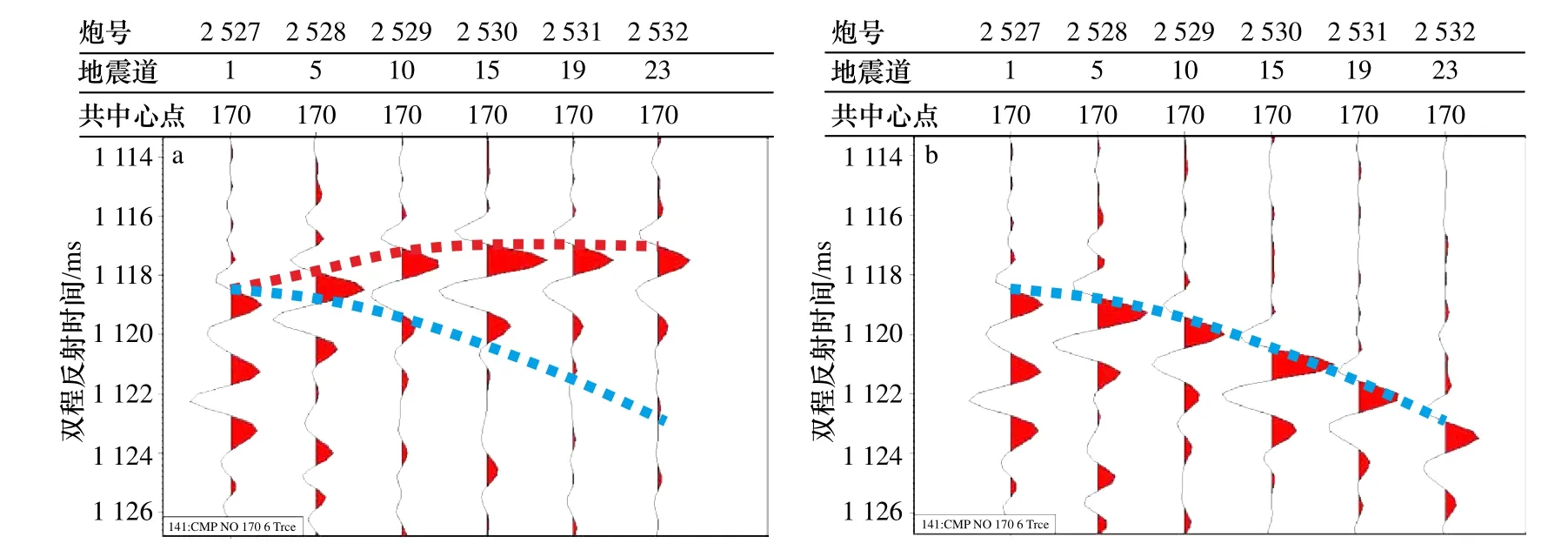
圖10 共中心點道集校正Fig.10 Common mid-point gather correction
校正前,共中心點道集海底反射同相軸并不滿足理論雙曲線規則,說明排列拖纜沒有位于同一深度平面上。校正后,獲得了可靠的海底層位的理論雙曲線型反射同相軸,為后續的速度掃描提供了可靠的數據基礎(圖 10)。
3.2 共炮檢距道集靜校正
分析追蹤共炮檢距道集反射同相軸時,發現部分接收點同相軸錯亂或者突跳,分析認為現場受風浪或涌浪影響引起震源、接收排列偏離原位置,導致排列彎曲,或者同時受激發采集系統記錄延遲的影響,造成不同炮集檢波點的海底反射時間發生偏差,該偏差需要通過校正歸位到理論位置上,否則會影響后續的速度分析。
處理中采用單道地震和淺地層剖面調查數據中的涌浪改正方法,利用模型道互相關技術以及平滑濾波方法[12-14],對地震數據共炮檢距剖面進行涌浪改正處理,改正后錯亂的同層位反射同相軸歸位到正確的時間位置(圖 11)。
3.3 疊加剖面水深校正
經過共反射點與共炮檢距剖面靜校正后,已經將各個檢波點校正到同一深度位置上,但是校正參考位置是假設的基準面深度位置,并不是調查海域的實際海平面且采集設備存在固有的系統延遲。為獲得準確的反射波旅行時,還需要利用實時測量的水深數據,進行震源與接收纜的整體水深改正,消除震源與接收排列沉放深度的影響,并將反射信號旅行時統一校正到海平面上。
將經過上面靜校正后的數據動校正后得到的疊加剖面再進行整體深度改正,獲得了圖12所示的改正前后最終的剖面對比結果。校正前后,海底同向軸雙程反射時間相差4 ms,水深值相差約3 m。排列整體深度校正主要取決于拖纜整體沉放深度,拖纜越靠近海平面,校正值越小。

圖11 共炮檢距道集校正Fig.11 Common offset gather correction

圖12 疊加剖面排列整體深度校正Fig.12 Stack section alignment overall depth correction
4 疊加效果分析
對我國第30次南極科考“雪龍”船上所采集的短排列多道地震數據進行上述相關的改正處理,即實際坐標觀測系統定義以及沉放深度校正特殊處理后,再經過常規的CMP抽道集、動校正、水平疊加處理,以及合適參數的帶通濾波處理與能量均衡處理后,獲得了圖13所示的最終成果對比圖。
從圖13a中可以看出校正前信噪比極差,反射層位的同相軸連續性無法追蹤,波組特征混亂,海底淺部層位(雙程反射時間1 170 ms以上)信息基本看不清楚,稍深處(雙程反射時間1 200~1 300 ms)呈現模糊的間斷反射層位信息(如C區)。圖13b表明基于實際坐標觀測系統定義與沉放深度校正處理后,不清楚的重點區塊同相軸變得清晰可見,層位可連續追蹤,剖面分辨率和信噪比均獲得明顯的提高(如A區與 A′區,B 區與 B′區,C 區與 C′區的對比)。
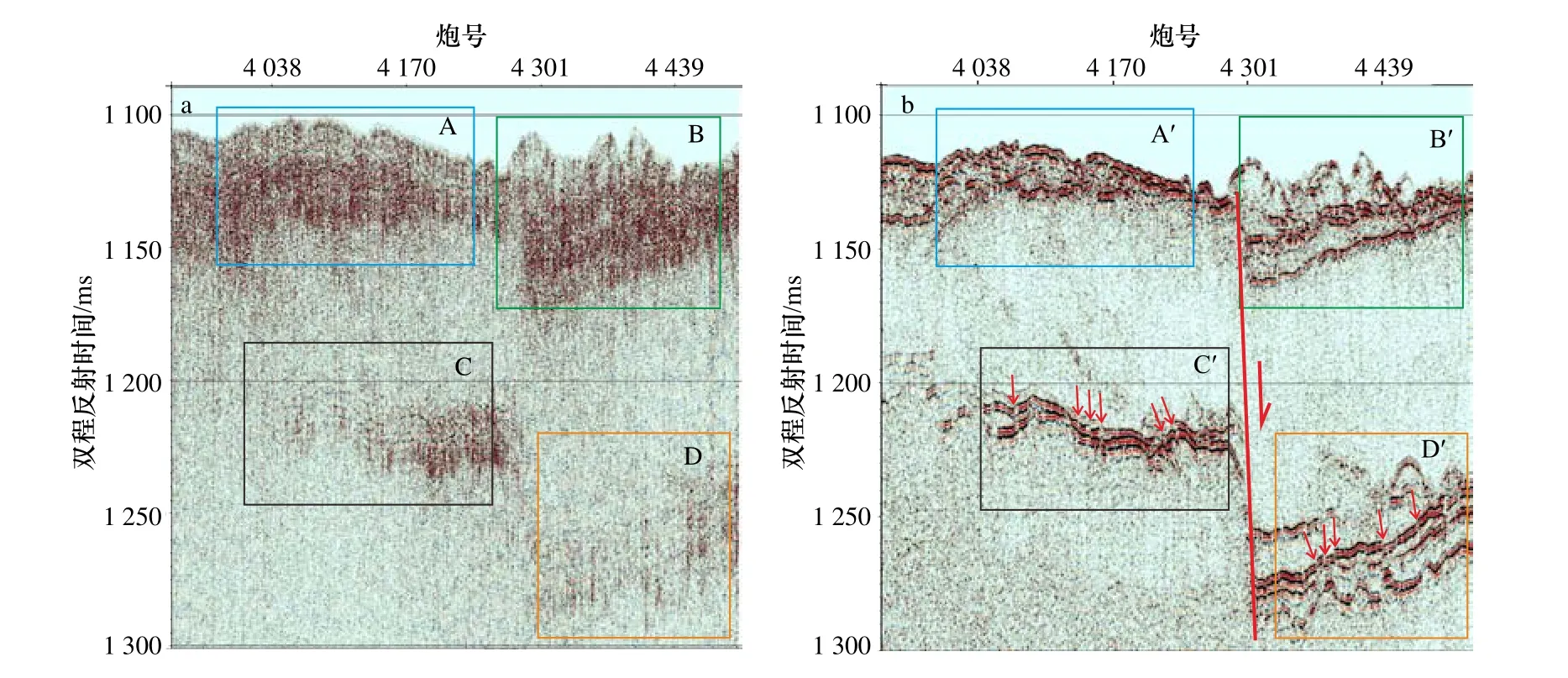
圖13 疊加效果分析Fig.13 Analysis of stack section
圖13中改正后清晰的強反射同相軸之間夾雜了明顯的空白反射層,這些空白反射層的厚度橫向不均一(如B′區),這種“三明治”式結構在南極海域較為典型,空白反射層往往是雜亂的混雜堆積(冰磧層)。結合其他調查資料(多波束地形地貌和公開地震剖面及前人研究成果),發現處理剖面上揭示出了南極羅斯海調查區域存在多次冰磧堆積,反映出了冰蓋多次到達該區域并產生顯著的地質影響。同時,剖面炮號4 270~4 290間存在一明顯的正斷層,還發現大量小的組合正斷層(C′區和D′區紅色箭頭處),說明該海域發生過強烈的現代構造活動,在海底中淺部地層上留下了多處明顯斷層構造。
通過充分利用這些有效處理后的高質量地震剖面,可以深入分析南極海域的冰川活動歷史及現代地質構造活動,為南極冰川氣候和海底環境變化研究提供可靠的科學證據。
5 結論
對于拖纜上未接入水鳥等定深和定位設備的短排列多道地震數據,基于直線假設定義的常規觀測系統,共反射點計算結果不僅偏離實際測線位置,還造成疊加次數偏差;另外,拖纜沉放深度的不一致導致接收點不位于同一深度平面內,處理后的疊加剖面同向軸錯亂,信噪比與分辨率都很差。
針對中國第30次南極科考在羅斯海維多利亞地盆地采集的24道短排列無水鳥數據,采用文中新的觀測系統定義方法及排列靜校正處理技術,利用導航數據計算實際坐標位置,采用反距離比線性插值方法模擬拖纜的拖行狀態和軌跡,準確計算接收點坐標;同時根據理論時距曲線計算排列接收點的擬合靜校正量,將接收點校正到同一基準面上。
通過以上所述改進原理及計算方法,有效處理了連續5年采集的南極羅斯海海域多道地震勘探數據,獲得了高信噪比、高分辨率的疊加剖面,為南極海域冰蓋消長歷史及現代地質活動研究提供了可靠的地震剖面證據。但南極海域多道地震勘探仍存在多個懸而未解的技術難題,如南極海域全球導航衛星系統(GNSS)定位精度問題等,可以考慮北斗與GPS組合定位、精密單點定位(PPP)技術等,提高定位數據采樣頻率等,從而獲取高精度的定位信息。
致謝:文中數據由我國第30次南極科考地球物理團隊提供,感謝第30次南極科考“雪龍”船上為數據采集提供服務的全體科考隊員。感謝北京奧能恒業能源有限公司工程師有價值的數據分析和處理探討,其有效建議幫助了本文的數據處理完成。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
