能力風暴智能機器人無線通信系統的研究
2020-05-22 01:01:42湖南科技學院實驗實訓中心鐘麗菲
河北農機 2020年4期
湖南科技學院實驗實訓中心 鐘麗菲
引言
當今時代,人類對機器人的研究越來越深入,其研究成果也越來越豐碩,其研究力度和研究層次都在不斷加大、不斷深入。人們期待智能機器人之間能夠彼此交流,互相協作,完成一些繁瑣復雜的工作任務,例如在某些火災場景中,為了保障救火員的人生安全,又要完成滅火的重任,就可以依靠機器人來完成滅火工作。但滅火需要統籌指揮,彼此溝通,滅火時機、滅火位置、滅火計劃都需要交流溝通,因此滅火機器人也必須彼此交流,互相協作,共同完成滅火的重任。
通信是不同機器人之間互相交流的基礎,通過通信,機器人才能了解其他機器人發送的指令,繼而完成相應的操作,在通信方式中,無線通信是最便捷、最高效、最理想的通信方式。
本文以力風暴智能機器人為實驗平臺,利用體積輕巧的單片機為通信工具,通過對接好單片機和機器人之間的接口,來實現機器人之間的無線通信。
1 能力風暴智能機器人平臺
本文的實驗內以能力風暴智能機器人為研究對象,能力風暴直徑為30cm,高13cm,能力風暴的頂端設置為半圓形,底端安裝一個具備圓形碰撞環的、能夠移動的機器人,機器人的微處理器選用單片機M68HC11,在微處理器中安置32 k 的靜態不揮發RAM,輔助以驅動、通訊、復位等外圍電路。
在進行試驗之前,要保障能力風暴智能機器人平臺具備以下功能;
(1)平臺底部的機器人能夠自主移動。它應該是一個適應能力強,具有具體規劃,靈活性強,能夠在繁瑣復雜場景內工作的智能機器人。
(2)傳感器的數量要盡可能地多,且傳感器的質量應該有所保障,其感知能力要強。傳感器的構造應該具備一個紅外接收模塊,此外還應該有兩支紅外發射管以及4 個碰撞傳感器。此外傳感器還必須配備旋轉角度編碼器以及麥克風。紅外傳感器的傳感能力為,可以感應正前方120°以內,距離紅外傳感器10~50cm 內的物體;紅外光傳感器應該能夠準確地判斷強弱光;碰撞傳感器應該安裝在碰撞環上,感受東西南北四個方向上以及東西南北四個方向45°夾角線上的碰撞;麥克風的功能是感知周圍聲音的強弱,其并無方向之分;旋轉編碼器可以精準地計量機器人轉輪的角度。
(3)能力風暴機器人之間都使用M68HC11 單片機,且必須使用交互式C 語言對單片機進行編程。交互式C 語言結構分為編譯環境以及機器人操作系統,交互式C 語言的優點是能夠同時進行多個編程,允許多個程序同時運行。機器人與計算機的連接方式是串口連接,在計算機內部編好的程序可以經由串口線輸送到機器人內部,從而發出相應的指令,操作機器人執行相關命令或者讓機器人主運行。
(4)機器人設計了硬件擴展總線ASBUS(abili2ty storm BUS)。設計硬件擴展總線的好處是便于機器人拓展外圍電路,為智能機器人之間的交流協作提供必要的基礎。硬件擴展總線有A,B 兩組,兩組加起來的信號線共計28 根。
在實際的實驗中,以下提及的信號線都是必須用到的、主要的信號線:VCC:5V 電源;GND:地;PC0~PC7:數據線:OS0~OS3:輸出選擇線0~3;IS0~IS3:輸入選擇線0~3;PA1~PA2:輸入捕捉口;PA3:輸出比較口。
2 機器人之間無線通信的硬件設計
2.1 無線通信模塊
顧及到機器人本來就具備的特性,以單片機為微處理器的無線通信是機器人之間最高效、最便捷、最理想的通信方式。在本實驗中的,單片機內的無線收發模塊為PTR2000。PTR2000 既能夠收信號,也可以發信號,它具備收發一體的功能。具體來說,PTR2000 還可以高頻率地發射信號和接收信號,能夠放大信號,合成信號,切換頻率等,該無線收發模塊主要有以下特性:
(1)集發射和接收為一體,體積小,約40 cm×27 cm×5 cm;
(2)工作頻率為國際通用的數傳頻段433MHz,采用FSK 調制/解調,可直接進行數據輸入/輸出,抗干擾能力強;
(3)工作電壓2.70~5.25 V,功耗小,接收待機狀態電流僅為8μA;
(4)工作速率最高可達20 kbit/s,也可在較低速率,如4800,9 600 bit/s 下工作,無需設置模塊通信速率;
(5)使用時不需要許可認證,在地形開闊的環境下,其使用距離能夠接近1 千米。PTR2000 一共7 個引腳,每個引腳具備的功能都不盡相同,具體如下;
VCC(1 腳):正電源輸入端,接2.70~5.25V;
CS(2 腳):頻道選擇端,CS=0 時,選擇工作頻道1,即,433.92 MHz;CS=1 時,選擇工作頻道2,即,434.33MHz;DO(3 腳):數據輸出端;
DI(4 腳):數據輸入端;
GND(5 腳):電源地;
PWR(6 腳):節能控制端,PWR=1 時,模塊處于正常工作狀態;PWR=0 時,模塊處于待機微功耗狀態;
TXEN(7 腳):發射/接收控制端,TXEN=1 時,模塊被設置為發射狀態;TXEN=0 時,模塊被設置為接收狀態[2]。
2.2 總體設計框圖
考慮到機器人本身的特點以及無線收發模塊的特點,設計了能力風暴智能機器人之間的無線通信框架圖。
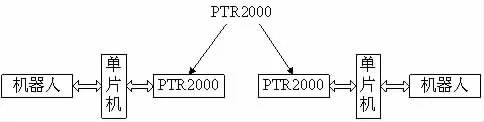
圖1 機器人無線通信總體框圖
2.3 無線收發模塊與機器人之間的接口電路設計
在實驗中,所有的機器人都必須具備發送無線數據和接收無線數據的功能,因此每個機器人身上都必須安裝無線收發模塊。又因為能力風暴機器人上的串口另有其他的作用,無法安裝無線收發模塊,因此就有必要在機器人和無線收發模塊的中間區域安裝一個型號為2051 的單片機。此單片機的作用是,連接機器人和無線收發模塊,向機器人反饋接收或者發送的信號。在具體的連接過程中,無線收發模塊的數據輸出端應該和單片機的串行接收端對應連接,而單片機的串行發送端應該和無線收發模塊的數據輸入端相連。單片機和和機器人的具體連接方法為,能力風暴機器人的數據口(PC0~PC7)應該和單片機的P1口對應連接,此外,機器人擴展總線上的輸入捕捉口應該和單片機的P3.4 相接,而機器人擴展總線上的輸出捕捉口應該與單片機上的P3.2 相接。
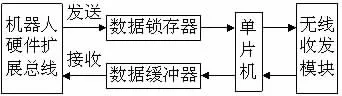
圖2 接口電路原理框圖
3 機器人之間無線通信軟件實現分別
機器人之間的信號接收和信號發送需要通過軟件編程才能實現,無線收發模塊的雙向通信也需要通過編程才能實現[10]。其原理為單片機將串行讀取的數據放入單片機內部的寄存器中,當完成此環節時,接收數據的第1 位是起始位0,第2~9 位是數據位,在發送數據時,會遵循先發送低位,后發送高位的規則,第10 位是停止位1,接下去的12 位都為1,即為發送數據的時間間隔5.5ms(11×500μs=5 500μs),最后一位是新一幀數據的起始位。
4 實驗結果分析
在兩個能力風暴智能機器人的身上裝上單片機微處理器,裝上無線收發模塊,兩個機器人分別記作機器人1 和機器人2,機器人1 與機器人2 之間的間隔距離為120m,中間沒有高大的障礙物,地勢平坦。機器人1 負責發送數據,機器人2 負責接收機器人1 發送的數據。舉例來說,如果機器人1 發送信號40H,41H,42H,43H,這些信號分別代表前進,后退,左轉以及右轉,當機器人2 接收到機器人發送的這些信號時,就應該執行相應的指令,前進或者轉動。機器人1 發送的數據以及機器人2 執行的指令整理成了下表1。
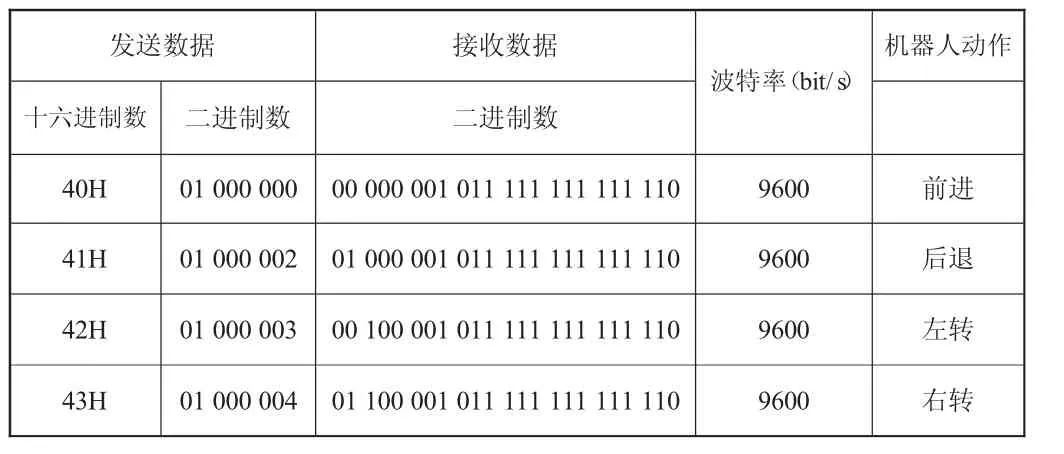
表1 數據傳輸測試結果
分析上表能夠知道,在120m 以內的有效范圍內,本文設計的無線通信方法能夠讓能力風暴智能機器人高效交流,機器人之間的信號發射和信號接收都是快速且高效的。
5 結語
本文根據所提出機器人與機器人之間的無線通信原理,設計了機器人之間無線通信的硬件模塊,編寫了無線通信的軟件實現。通過實驗測試表明,在有效的距離范圍內,多個機器人之間能夠快速地發射和接收信號。該無線通信實驗,沒有通過計算機實現數據交換,而是直接通過無線通信實現機器人之間的直接數據傳輸,讓機器人之間具備了直接交流的功能。多機器人系統研究作為一個熱點研究方向,本文的實現方法具有重要的參考價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
