車輛座椅和懸架系統(tǒng)的參數(shù)自調(diào)整模糊PID集成控制
2020-05-21 03:14:42田海勇王靖岳梁洪明
機械研究與應用 2020年2期
田海勇, 王靖岳, 張 勇, 梁洪明
(1.中車大同電力機車有限公司,山西 大同 037038; 2.沈陽理工大學 汽車與交通學院, 遼寧 沈陽 110159;3.湖南大學 汽車車身先進設計制造國家重點實驗室,湖南 長沙 410082; 4.廈門金龍旅行車有限公司,福建 廈門 361026;5.中國質(zhì)量認證中心沈陽分中心,遼寧 沈陽 110013)
0 引 言
車輛的行駛平順性和舒適性是人們關注的熱點問題。20世紀60年代以來,國內(nèi)外專家學者開始研究主動、半主動控制懸架系統(tǒng),提出了不同的控制方法,如最優(yōu)控制[1-2]、自適應控制[3-4]、模糊控制[5-6]、人工神經(jīng)網(wǎng)絡[7-8]等。隨著座椅設計技術的提高,出現(xiàn)了可控座椅,大大提高了乘座舒適性,也把一些控制方法應用其中。張志勇等針對座椅懸架系統(tǒng)參數(shù)的不確定性和位移測量難題,基于線性矩陣不等式和H∞最優(yōu)控制理論,設計了座椅懸架系統(tǒng)的參數(shù)不確定性H∞輸出反饋控制器[9]。朱躍等針對含有人體動態(tài)的座椅懸架系統(tǒng),通過合理選擇狀態(tài)變量及干擾變量,從控制通道輸入的匹配干擾來建立路面激勵,同時考慮模型參數(shù)變化這一類不匹配干擾對系統(tǒng)的影響,基于滑模控制理論,設計了全程滑模切換函數(shù);結合不匹配干擾估計器,構建了座椅懸架系統(tǒng)控制器[10]。趙強等提出基于半車解耦模型的半主動座椅懸架的模糊滑模控制,通過與PID控制、滑模控制和被動懸架仿真結果的對比驗證了仿真結果,該方法明顯減小了座椅振動[12]。姜鵬等設計、制造并測試了一種可同時實現(xiàn)垂向和縱向振動衰減的半主動集成座椅懸架系統(tǒng),對比分析了半主動模糊控制、半被動控制以及被動控制狀態(tài)下座椅懸架系統(tǒng)的振動性能,將仿真結果用搭建的實驗測試系統(tǒng)進行了驗證[13]。隨著汽車向集成化、智能化、節(jié)能化等方向發(fā)展,人們開始將車輛懸架和座椅懸架進行集成控制,郭立新等先后提出基于線性矩陣不等式優(yōu)化技術的主動座椅懸架和車輛主動懸架的魯棒H∞集成控制策略和變增益LQR集成控制策略[14-15]。胡國良等提出了一種聯(lián)合車輛主動懸架與座椅主動懸架的集成最優(yōu)控制[16]。殷康勝等以駕駛員座椅和懸架系統(tǒng)為研究對象,運用將不同優(yōu)化算法組合的方法對駕駛員座椅和懸架系統(tǒng)結構參數(shù)進行優(yōu)化并獲得最優(yōu)解集[17]。從以上文獻中可以看出,要么單獨控制車身,要么單獨控制座椅,把兩者結合起來的集成控制研究還比較少且算法單一,值得廣泛深入研究。
筆者設計了參數(shù)自調(diào)整模糊PID控制器,分別應用在車身控制、座椅控制和對車身和座椅的集成控制模型上,以人體加速度、座椅加速度、車身加速度、懸架動撓度和車輪動載荷為評價指標對比分析了集成控制策略的優(yōu)越性。
1 “車-椅-人”系統(tǒng)模型
圖1為一個簡化了的1/4車體四自由度車輛懸架系統(tǒng)集成控制模型。

圖1 “車-椅-人”系統(tǒng)集成控制模型
圖中k1為坐墊等效剛度;k2為座椅彈簧剛度;k3為懸架等效剛度;k4為輪胎等效剛度;m1為人體質(zhì)量;m2為座椅質(zhì)量;m3為車身質(zhì)量;m4為輪胎質(zhì)量;c1為坐墊等效阻尼系數(shù);c2為座椅等效阻尼系數(shù);c3為懸架等效阻尼系數(shù);z1為人體質(zhì)心的垂直位移;z2為座椅質(zhì)心的垂直位移;z3為車身質(zhì)心的垂直位移;z4為輪胎質(zhì)心的垂直位移;z5為路面輸入位移;us、ub是由控制器控制的變阻尼減振器所產(chǎn)生的阻尼力,ECU為汽車專用計算機控制系統(tǒng)。
該系統(tǒng)的動力學微分方程為:
(1)
2 參數(shù)自調(diào)整模糊PID控制器的設計
參數(shù)自調(diào)整模糊PID控制融合了PID和模糊思想。首先,利用PID算法,以座椅的垂直運動速度e及速度變化率ec作為系統(tǒng)控制輸入量;然后,利用模糊規(guī)則對e和ec進行模糊推理;最后,對參數(shù)進行調(diào)整,進而滿足不同時刻對參數(shù)自整定的要求。修正參數(shù)ΔkP、ΔkI、ΔkD為輸出,如圖2所示。那么,PID控制器輸出的參數(shù)kP、kI、kD為式(2)~(4)所示;其中,kP′、kI′、kD′為預整定值。
kP=kP′+ΔkP
(2)
kI=kI′+ΔkI
(3)
kD=kD′+ΔkD
(4)

圖2 參數(shù)自調(diào)整模糊PID控制原理圖
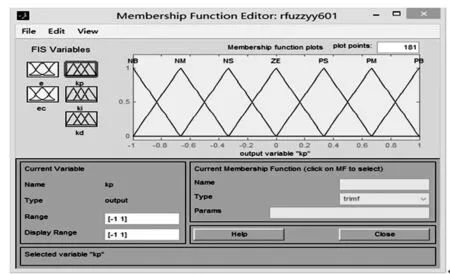
圖3 隸屬度函數(shù)曲線
模糊控制器的輸入和輸出均用語言子集{負大,負中,負小,零,正小,正中,正大}來表示,即{FD,FZ,FX,O,ZX,ZZ,ZD},建立合適的模糊控制規(guī)則,建立的規(guī)則集共49條,如表1~3所列。模糊變量誤差、誤差變化、控制量的模糊論域均為[-3,3],調(diào)整系數(shù)的模糊論域均為[-1,1],然后計算出各量化因子。控制器的輸入和輸出變量的隸屬度函數(shù)選用三角形隸屬度函數(shù),應用MATLAB中的Fuzzy工具箱來設計函數(shù)曲線,如圖3所示。

表1 Δkp的模糊控制規(guī)則表

表2 ΔkI的模糊控制規(guī)則表
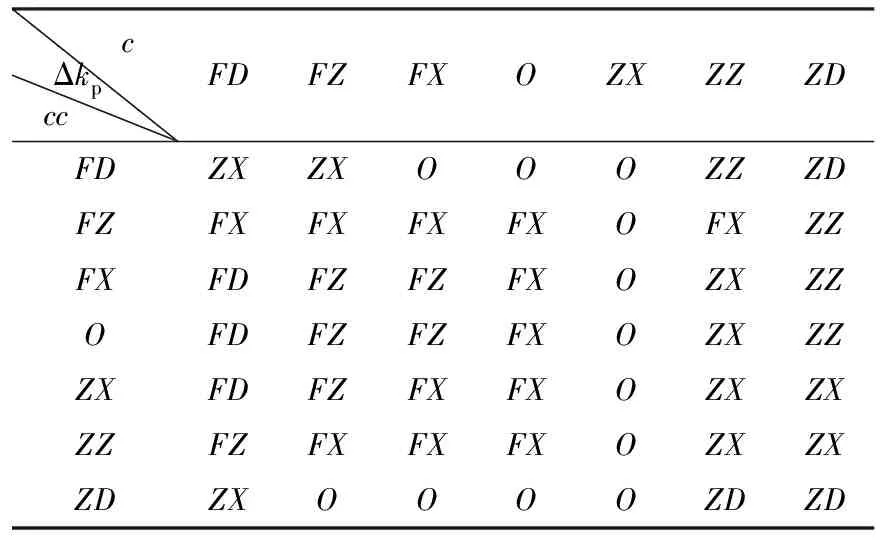
表3 ΔkD的模糊控制規(guī)則表
3 仿真結果與比較


表4 車輛的基本參數(shù)
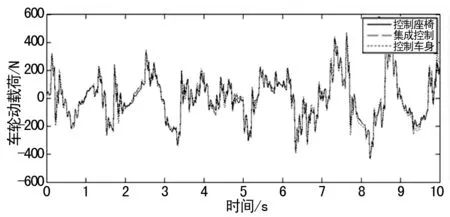
圖4 車輪動載荷隨時間的變化圖

圖5 懸架動撓度隨時間的變化圖

圖6 車身加速度隨時間的變化圖

圖7 座椅加速度隨時間的變化圖

圖8 人體加速度隨時間的變化圖

表5 性能改善分析表
從表5中可以看出,與以車身控制、座椅控制相比,集成控制的車輪動載荷降低了11.67%、懸架動撓度減小了18.18%、車身加速度減小了19.81%、座椅加速度減小了22.46%、人體加速度減小了19.73%,提高了汽車的操縱穩(wěn)定性和行駛平順性。
4 結 論
針對車輛座椅和懸架系統(tǒng)向集成化方向發(fā)展,提出了參數(shù)自調(diào)整模糊PID控制策略,通過仿真得出以下及結論。
(1) 融合模糊理論和PID設計的模糊PID控制器可以參數(shù)自整定,控制的效果好。
(2) 與分別以車身和座椅為控制目標相比較,集成控制更能減少車輪動載荷、懸架動撓度、車身加速度、座椅加速度和人體加速度;明顯的改善了汽車的行駛平順性和操縱穩(wěn)定性。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
