基于模型設(shè)計的電動助力轉(zhuǎn)向系統(tǒng)策略研究
2020-05-20 15:05:18劉世杰嚴(yán)天一賈兆功陸金更林軍
青島大學(xué)學(xué)報(工程技術(shù)版) 2020年2期
關(guān)鍵詞:控制策略
劉世杰 嚴(yán)天一 賈兆功 陸金更 林軍

摘要:為兼顧車輛轉(zhuǎn)向輕便性和操縱穩(wěn)定性,并提高車輛的燃油經(jīng)濟(jì)性,本文采用恩智浦32位MPC5634主控芯片,對基于模型設(shè)計的電動助力轉(zhuǎn)向系統(tǒng)策略進(jìn)行研究。通過Simulink/Stateflow搭建助力控制策略、回正控制策略及阻尼控制策略的仿真模型,通過功能性和結(jié)構(gòu)性測試之后,自動生成嵌入式C代碼,通過軟件在環(huán)(software in-the-loop,SIL)進(jìn)行仿真測試,并通過實車標(biāo)定試驗和轉(zhuǎn)向試驗,驗證電動助力轉(zhuǎn)向系統(tǒng)控制策略的有效性。試驗結(jié)果表明,在車輛怠速工況下,開啟電動助力轉(zhuǎn)向系統(tǒng)時,轉(zhuǎn)矩傳感器的轉(zhuǎn)矩信號與關(guān)閉電動助力轉(zhuǎn)向系統(tǒng)時轉(zhuǎn)矩傳感器的轉(zhuǎn)矩信號相比,轉(zhuǎn)矩傳感器輸出的最大轉(zhuǎn)矩信號AD值由210降至174,轉(zhuǎn)矩差值由助力電機(jī)提供的轉(zhuǎn)矩彌補(bǔ),說明所開發(fā)的電動助力轉(zhuǎn)向系統(tǒng)具有較明顯的助力效果,能夠滿足設(shè)計需求。該研究具有較好的應(yīng)用前景。
關(guān)鍵詞:電動助力轉(zhuǎn)向系統(tǒng); 電子控制單元; 控制策略; 性能試驗
中圖分類號: U463.4; U461.6文獻(xiàn)標(biāo)識碼: A
文章編號: 1006-9798(2020)02-0097-07; DOI: 10.13306/j.1006-9798.2020.02.015
車輛轉(zhuǎn)向系統(tǒng)作為改變或恢復(fù)行駛方向的專設(shè)機(jī)構(gòu),保證車輛可以按照駕駛員意圖進(jìn)行轉(zhuǎn)向行駛,其性能直接影響操縱穩(wěn)定性[1]、乘坐舒適性[2]和安全性。隨著汽車電子控制技術(shù)的發(fā)展,傳統(tǒng)的機(jī)械轉(zhuǎn)向系統(tǒng)已發(fā)展到更加智能化的電動助力轉(zhuǎn)向系統(tǒng)[3]。電動助力轉(zhuǎn)向系統(tǒng)作為一種新型助力轉(zhuǎn)向系統(tǒng),能夠根據(jù)駕駛員意圖和行駛工況提供實時轉(zhuǎn)向助力,可以確保低速行駛時輕便靈活,而高速行駛時穩(wěn)定可靠[4]。近年來,相關(guān)研究機(jī)構(gòu)對電動助力轉(zhuǎn)向系統(tǒng)及其控制技術(shù)展開研究。李紹松等人[5]通過無轉(zhuǎn)角傳感器的主動回正控制方法,改善了車輛回正性能;施國標(biāo)等人[6]介紹了電動助力轉(zhuǎn)向系統(tǒng)的匹配設(shè)計過程,提出助力特性與車型的匹配原則;吳鋒等人[7]分析了電流閉環(huán)PI控制器的參數(shù)設(shè)計和電流給定算法設(shè)計與系統(tǒng)性能的關(guān)系。目前,通過模型設(shè)計方法進(jìn)行電動助力轉(zhuǎn)向系統(tǒng)策略開發(fā)的研究較少。因此,本文基于模型設(shè)計方法,搭建電動助力轉(zhuǎn)向系統(tǒng)Simulink/Stateflow控制策略模型,自動生成嵌入式C代碼,為了驗證所提出的電動助力轉(zhuǎn)向系統(tǒng)控制策略的有效性和可靠性,進(jìn)行實車電動助力轉(zhuǎn)向試驗。通過實車試驗,證明所開發(fā)的電動助力轉(zhuǎn)向系統(tǒng)具有較明顯的助力效果。該研究具有一定的實際應(yīng)用價值。
1工作原理
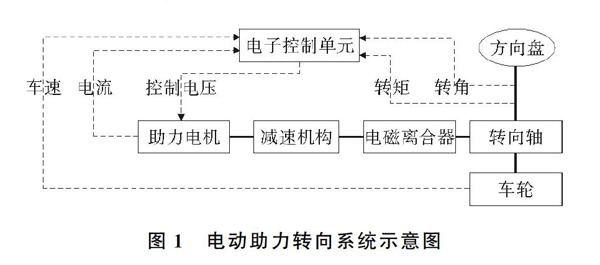
電動助力轉(zhuǎn)向系統(tǒng)主要由信號采集系統(tǒng)、電子控制單元、助力電機(jī)、減速機(jī)構(gòu)和電磁離合器等組成[9],電動助力轉(zhuǎn)向系統(tǒng)示意圖如圖1所示。信號采集系統(tǒng)采集轉(zhuǎn)向盤轉(zhuǎn)矩信號、轉(zhuǎn)向盤轉(zhuǎn)角信號、車速信號、助力電機(jī)電流信號[10]并傳輸?shù)诫娮涌刂茊卧?電子控制單元通過信號采集系統(tǒng)獲得的轉(zhuǎn)矩信號、車速信號等判斷助力電機(jī)的理想工作狀態(tài),計算得到目標(biāo)控制電流大小,并控制助力電機(jī)輸出合適的電磁轉(zhuǎn)矩[11];助力電機(jī)是電動助力轉(zhuǎn)向系統(tǒng)的動力源,在電子控制單元控制下輸出相應(yīng)的助力轉(zhuǎn)矩[12],本文選用三相無刷電機(jī)作為電動助力轉(zhuǎn)向系統(tǒng)的助力電機(jī);減速機(jī)構(gòu)與助力電機(jī)相連,起到降速增扭的作用[13];電磁離合器將輔助轉(zhuǎn)向力矩施加到轉(zhuǎn)向系統(tǒng),實現(xiàn)實時控制的助力轉(zhuǎn)向,同時避免電機(jī)轉(zhuǎn)動慣性引起的不利影響。
2助力特性曲線與控制策略模型
2.1助力特性曲線
電動助力轉(zhuǎn)向系統(tǒng)的功能需求主要包括分析助力控制模式、回正控制模式和阻尼控制模式的功能及可靠性的具體要求,確定各模式之間的切換條件和切換過程。
助力控制模式的核心是確定助力特性曲線及確定控制單元控制助力電流大小的方式,以滿足不同工況下對助力扭矩的要求[14]。助力特性曲線通常通過實車道路試驗對基本特性曲線進(jìn)行調(diào)整獲得[15-17],較為典型的有直線型、折線型和曲線型[18]。典型助力特性曲線如圖2所示。
直線型助力特性曲線可表示為
式中,I為助力電機(jī)目標(biāo)電流;f(v)為助力特性曲線梯度;Imax為助力電機(jī)最大工作電流;Td為轉(zhuǎn)向盤輸入力矩;Td0為電動助力轉(zhuǎn)向系統(tǒng)開始工作時轉(zhuǎn)向盤輸入力矩;Tdmax為電機(jī)輸出轉(zhuǎn)矩最大時轉(zhuǎn)向盤輸入力矩。
折線型助力特性曲線可表示為
式中,f1(v)、f2(v)為助力特性曲線梯度;Td1為轉(zhuǎn)向盤輸入力矩。
曲線型助力特性曲線可表示為
式中,f(Td)為轉(zhuǎn)向盤輸入力矩非線性函數(shù)[19]。
若轉(zhuǎn)向盤轉(zhuǎn)角與角速度方向相反,需通過回正控制模式來改善轉(zhuǎn)向回正特性,提高車輛的操縱穩(wěn)定性;若轉(zhuǎn)向盤轉(zhuǎn)角與角速度方向相同,且車輛行駛速度達(dá)到或超過設(shè)定的速度閥值,則需通過阻尼控制模式來減輕轉(zhuǎn)向盤抖動現(xiàn)象,同時防止出現(xiàn)轉(zhuǎn)向盤回正超調(diào)狀況[20]。
2.2控制策略模型
利用Simulink/Stateflow搭建電動助力轉(zhuǎn)向系統(tǒng)控制策略模型,電動助力轉(zhuǎn)向系統(tǒng)控制策略模型如圖3所示。圖3中,主要包括檢查模塊、助力控制模塊、回正控制模塊和阻尼控制模塊等部分。
檢測模塊負(fù)責(zé)檢測轉(zhuǎn)矩傳感器和速度傳感器是否正常工作,然后根據(jù)傳感器的輸出信號判斷應(yīng)執(zhí)行的控制模式。若轉(zhuǎn)向盤轉(zhuǎn)角與角速度的方向相同,且車速低于設(shè)定的閥值,進(jìn)入助力控制模塊,助力控制模塊如圖4所示。
轉(zhuǎn)矩傳感器的輸出信號值決定助力電機(jī)的工作狀態(tài),若轉(zhuǎn)向盤轉(zhuǎn)矩的絕對值小于1 N·m,進(jìn)入無助力子模塊,該模式下助力電機(jī)不工作;若轉(zhuǎn)向盤轉(zhuǎn)矩的絕對值大于1 N·m且小于10 N·m,則進(jìn)入助力變化子模塊,該模式下,需根據(jù)車輛實際行駛速度,計算并輸出變占空比的脈寬調(diào)制信號,控制助力電機(jī)輸出所需的助力轉(zhuǎn)矩;若轉(zhuǎn)向盤轉(zhuǎn)矩的絕對值大于10 N·m,進(jìn)入助力不變子模塊,該模式下,需根據(jù)車輛行駛速度,計算并輸出固定占空比的脈寬調(diào)制信號,控制助力電機(jī)輸出所需的助力轉(zhuǎn)矩。
當(dāng)轉(zhuǎn)向盤轉(zhuǎn)角和其角速度的方向相反時,進(jìn)入回正控制模塊,回正控制模塊如圖5所示。該模式下,需根據(jù)車輛的行駛工況,輸出適當(dāng)占空比的脈寬調(diào)制信號,控制助力電機(jī)輸出回轉(zhuǎn)助力或回正阻力,幫助駕駛員完成回正動作;若轉(zhuǎn)向盤轉(zhuǎn)角與角速度方向相同,且車輛實際行駛速度達(dá)到或超過設(shè)定的速度閥值,進(jìn)入阻尼控制模塊,阻尼控制模塊如圖6所示,該模式下,需根據(jù)方向盤輸入的轉(zhuǎn)矩方向和大小,控制助力電機(jī)輸出合適的阻力以減輕振動。
2.3模型檢查與驗證
利用Simulink Design Verifier模塊生成測試用例的仿真模型,需求文檔與模型關(guān)聯(lián)如圖7所示。其中,Inputs模塊包含轉(zhuǎn)向盤轉(zhuǎn)矩、轉(zhuǎn)角及角速度信號、車速信號等系統(tǒng)控制策略模型測試用例;Test Case Explanation模塊是對自動生成的測試用例的說明。共有25種測試用例仿真模型,測試用例如圖8所示;Test Unit模塊為前文所搭建的電動助力轉(zhuǎn)向系統(tǒng)控制策略模型。運行測試仿真模型后,得到模型的覆蓋度分析結(jié)果,模型覆蓋度如圖9所示,模型覆蓋度報告顯示,自動生成的測試用例具有較高的覆蓋度,能夠滿足模型的測試需求。
2.4代碼生成及驗證
采用Matlab中的Embedded Coder模塊,將搭建的電動助力轉(zhuǎn)向控制策略模型轉(zhuǎn)換為嵌入式C代碼,并驗證其有效性和可靠性,然后通過Configuration Parameters模塊生成SIL仿真模型,并在控制策略模型中進(jìn)行仿真,原控制策略仿真模型與SIL仿真模型對比如圖10所示。由圖10可以看出,圖10b與圖10a的輸出結(jié)果相同,證明所生成的C代碼能夠有效運行,且功能與原控制模型保持一致。
3電子控制單元開發(fā)
電動助力轉(zhuǎn)向系統(tǒng)的電子控制單元主要由電源模塊、單片機(jī)最小系統(tǒng)模塊、轉(zhuǎn)向助力電機(jī)驅(qū)動模塊、信息采集模塊、信號調(diào)理模塊、CAN通訊模塊、電流檢測模塊等部分組成。
電動助力轉(zhuǎn)向系統(tǒng)電子控制單元以恩智浦公司32位MPC5634單片機(jī)為主控芯片,該芯片集成了96 kB的RAM,1.5 M的Flash存儲器,32個eTPU2通道,32個12 bit增強(qiáng)型模數(shù)轉(zhuǎn)換通道,2個eSCI模塊,2個DSPI模塊,2個FlexCAN模塊,邏輯運算和數(shù)值運算能力較強(qiáng),具有浮點運算能力,最小系統(tǒng)的晶振頻率為8 MHz。
4實車性能試驗
4.1轉(zhuǎn)矩信號標(biāo)定
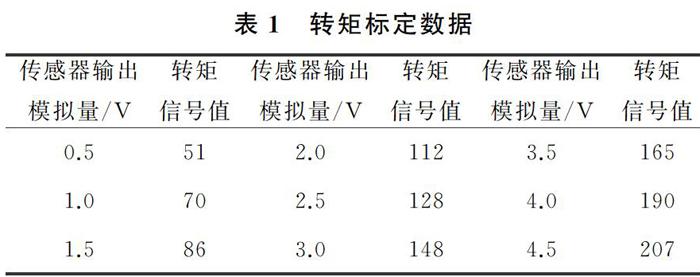
通過轉(zhuǎn)矩標(biāo)定試驗,將轉(zhuǎn)矩傳感器輸出的轉(zhuǎn)矩模擬量轉(zhuǎn)換為主控制器能夠識別的轉(zhuǎn)矩信號值,轉(zhuǎn)矩信號值與轉(zhuǎn)矩傳感器輸出模擬量的標(biāo)定數(shù)據(jù)如表1所示。
對試驗數(shù)據(jù)進(jìn)行曲線擬合,得到轉(zhuǎn)矩信號值標(biāo)定曲線和車速標(biāo)定曲線,轉(zhuǎn)矩信號標(biāo)定曲線如圖11所示,轉(zhuǎn)矩信號值與傳感器輸出模擬量的關(guān)系為
y=0.025 4x-0.768 8? ( 4)
式中,y為轉(zhuǎn)矩模擬量;x為轉(zhuǎn)矩傳感器輸出值。
4.2速度信號標(biāo)定
通過車速標(biāo)定試驗將車速傳感器輸出的數(shù)字頻率信號轉(zhuǎn)換為實際車速值,實際車速與車速傳感器單位時間輸出脈沖數(shù)的標(biāo)定數(shù)據(jù)如表2所示。
對試驗數(shù)據(jù)曲線擬合,得到車速信號標(biāo)定曲線,車速信號標(biāo)定曲線如圖12所示。車速與脈沖數(shù)的關(guān)系為
ν=0.202n+0.732 8? (5)
式中,v為車速;n為脈沖數(shù)。
4.3實車性能試驗
為了驗證所提出的電動助力轉(zhuǎn)向系統(tǒng)控制策略的有效性,進(jìn)行實車電動助力轉(zhuǎn)向試驗,試驗車樣車如圖13所示。通過采集轉(zhuǎn)矩傳感器的轉(zhuǎn)矩信號,得到轉(zhuǎn)向盤轉(zhuǎn)矩的變化曲線,原地轉(zhuǎn)向時,有助力與無助力轉(zhuǎn)矩值比較如圖14所示。
由圖14可以看出,在車輛怠速工況下,開啟電動助力轉(zhuǎn)向系統(tǒng)時,轉(zhuǎn)矩傳感器的轉(zhuǎn)矩信號與關(guān)閉電動助力轉(zhuǎn)向系統(tǒng)時轉(zhuǎn)矩傳感器的轉(zhuǎn)矩信號相比,轉(zhuǎn)矩傳感器輸出的最大轉(zhuǎn)矩信號AD值從210降低到174,轉(zhuǎn)矩差值由助力電機(jī)提供的轉(zhuǎn)矩彌補(bǔ),證明所開發(fā)的電動助力轉(zhuǎn)向系統(tǒng)具有較明顯的助力效果。
5結(jié)束語
本文基于模型設(shè)計方法對電動助力轉(zhuǎn)向系統(tǒng)功能進(jìn)行層次化劃分,搭建Simulink/Stateflow控制策略模型,可以在測試過程中快速檢查錯誤,直接生成穩(wěn)定的嵌入式代碼,縮短產(chǎn)品開發(fā)周期,提高效率;實車試驗數(shù)據(jù)顯示,開啟電動助力轉(zhuǎn)向系統(tǒng)后,試驗車轉(zhuǎn)向所需駕駛員提供的力矩明顯降低,證明該電動助力轉(zhuǎn)向系統(tǒng)可以有效為駕駛員提供實時轉(zhuǎn)向助力,驗證了所開發(fā)電動助力轉(zhuǎn)向系統(tǒng)控制策略的有效性。但在試驗過程中,發(fā)現(xiàn)電動助力系統(tǒng)長時間滿負(fù)荷工作會導(dǎo)致電機(jī)驅(qū)動模塊發(fā)熱嚴(yán)重,有待電子控制單元及其控制策略的進(jìn)一步研究完善。
參考文獻(xiàn):
[1]高勇, 陳龍, 袁傳義, 等. 電動助力轉(zhuǎn)向系統(tǒng)回正控制研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報, 2007, 38(5) : 6-10.
[2]張昕, 施國標(biāo), 林逸. 電動助力轉(zhuǎn)向的轉(zhuǎn)向感覺客觀綜合評價[J]. 機(jī)械工程學(xué)報, 2009, 45(6): 171-175.
[3]呂英超, 季學(xué)武, 孫寧, 等. EPS用PMSM弱磁控制策略的仿真與試驗研究[J]. 汽車工程, 2013, 35(6) : 500-504.
[4]林逸, 施國標(biāo), 鄒常豐, 等. 電動助力轉(zhuǎn)向系統(tǒng)轉(zhuǎn)向性能的客觀評價. 農(nóng)業(yè)機(jī)械學(xué)報, 2003, 34(4): 4-7.
[5]李紹松, 宗長富, 吳振晰, 等. 電動助力轉(zhuǎn)向主動回正控制方法[J]. 吉林大學(xué)學(xué)報: 工程技術(shù)版, 2012, 42(6): 65-71.
[6]施國標(biāo), 林逸, 鄒常豐, 等. 電動助力轉(zhuǎn)向系統(tǒng)匹配設(shè)計的研究[J]. 公路交通科技, 2003, 20(5): 125-128.
[7]吳峰, 楊志家, 姚棟偉, 等. 電動助力轉(zhuǎn)向系統(tǒng)控制策略的研究[J]. 汽車工程, 2006, 28(7): 676-680.
[8]陸金更. 基于模型的電動助力轉(zhuǎn)向系統(tǒng)策略開發(fā)及其試驗研究[D]. 青島: 青島大學(xué), 2018.
[9]王倩, 藺毅. 汽車動力轉(zhuǎn)向系統(tǒng)的發(fā)展[J]. 農(nóng)業(yè)裝備與車輛工程, 2009(3): 45-46, 52.
[10]何澤剛, 申榮衛(wèi), 謝康, 等. 直流無刷電動機(jī)的汽車電動助力轉(zhuǎn)向系統(tǒng)控制策略研究[J]. 現(xiàn)代制造工程, 2015(2): 57-61.
[11]于建成. 汽車電動助力轉(zhuǎn)向系統(tǒng)的研究與開發(fā)[D]. 大連: 大連理工大學(xué), 2005.
[12]陳誠. 基于PSoC的無刷直流電機(jī)控制系統(tǒng)研究[D]. 天津: 天津大學(xué), 2005.
[13]李書龍, 許超, 楊智. 汽車電動助力轉(zhuǎn)向系統(tǒng)硬件設(shè)計[J]. 機(jī)電工程, 2004, 21(1): 5-7.
[14]鄧?yán)姡?張琎, 王書賢. EPS系統(tǒng)助力特性與控制策略研究[J]. 農(nóng)業(yè)裝備與車輛工程, 2010(10): 19-22.
[15]楊樹, 唐新蓬. 汽車電動助力轉(zhuǎn)向系轉(zhuǎn)向盤力特性的初步研究[J]. 汽車科技, 2003(3): 19-21.
[16]唐新蓬, 楊樹. 電動助力轉(zhuǎn)向系統(tǒng)與汽車轉(zhuǎn)向盤力特性的仿真研究[J]. 機(jī)械科學(xué)與技術(shù), 2005, 24(12): 1387-1390.
[17]宋貴勇, 張洪欣. 常規(guī)轉(zhuǎn)向系統(tǒng)的路感特性及其改善途徑[J]. 上海汽車, 2000(5): 17-23.
[18]劉照. 汽車電動助力轉(zhuǎn)向系統(tǒng)動力學(xué)分析與控制方法研究[D]. 武漢: 華中科技大學(xué)機(jī)械學(xué)院, 2005: 65-74.
[19]王若平, 李千, 高翔. 閉式電控液壓助力轉(zhuǎn)向直線型助力特性的設(shè)計[J]. 汽車工程, 2012, 34(3) : 255-259.
[20]何正義, 季學(xué)武, 張雪峰. 永磁同步電機(jī)EPS的阻尼控制[J]. 電力電子技術(shù), 2008, 42(5) : 66-68.
Study on the Strategy of EPS System Based on Model Design
LIU Shijie1, YAN Tianyi1, JIA Zhaogong1, LU Jingeng2, LIN Jun3
(1. School of Electromechanic Engineering, Qingdao University, Qingdao 266071, China; 2. Huahai Technologies Co., Ltd., Beijing 100000, China; 3. Qingdao Three-Star Precision Forging Gear Co., Ltd., Qingdao 266000, China)
Abstract:In order to take into account the vehicle steering lightness and control stability, reduce fuel consumption, this paper used NXP 32-bit MPC5634 microcontroller to study the Strategy of EPS System Based on Model Design. We build the Simulink/Stateflow control strategy model, carry out structural and functional tests, generate embedded code and verify through the SIL(software in-the-loop) test. Then, we verify the effectiveness of the electric power steering system control strategy through real vehicle calibration test and steering test. The test results show that when the electric power steering system is turned on, the torque signal of the torque sensor is compared with that of the torque sensor when the electric power steering system is turned off, the maximum torque signal AD value of the torque sensor is reduced from 210 to 174, and the torque difference is compensated by the torque provided by the booster motor. It shows that the developed electric power steering system has obvious power assist effect and can meet the design requirements. This research has a good application prospect.
Key words:electric power steering; electronic control unit; control strategy; performance test
收稿日期: 2019-12-24; 修回日期: 2020-02-28
基金項目: 山東省自然科學(xué)基金面上項目(ZR2016EEM49);國家自然科學(xué)基金資助項目(51475248)
作者簡介: 劉世杰(1993-),男,碩士研究生,主要研究方向為汽車動態(tài)仿真與控制技術(shù)。
通信作者: 嚴(yán)天一(1970-),男,博士,教授,碩士生導(dǎo)師,主要研究方向為車輛系統(tǒng)動力學(xué)及其控制技術(shù)。 Email: yan_7012@126.com
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36