基于樹莓派的小型水下機器人設計
2020-05-19 14:57:40熊超付佳偉李海翔葛增元王文森胡玉甫
科技風 2020年14期
熊超 付佳偉 李海翔 葛增元 王文森 胡玉甫

摘?要:設計了一款基于樹莓派的小型水下機器人,并開發了上位機軟件,在上位機發送指令能控制機器人運動、參數采集和數據傳輸,能極大方便用戶對養殖池的水質進行監測的需求。
關鍵詞:水下機器人;水質監測
中國是水產養殖第一大國,養殖總量占全世界70%以上[1]。在養殖過程中,經常需要控制水體的溫度、PH值和含氧量等,使之適合魚類的生長,傳統方法是對水體樣本進行采集然后檢測,不僅不方便,而且檢測不具實時性。本文針對上述問題,開展對水下機器人系統設計與集成研究,開發出了一款較為實用的水下機器人。
1 系統方案設計
系統總體設計主要包括對硬件系統和軟件系統的設計和耦合。硬件系統包括機器人結構和電路組成,軟件系統包括上位機和下位機,上位機與機器人通過WiFi通信,當上位機發送指令后,機器人解析指令,然后執行相關操作。
2 硬件系統設計
2.1 本體結構設計
本體結構設計過程中應考慮安全性和實用性,要根據元器件的形狀、重量等因素,進行精確計算和合理布置,使重心位于浮心下方以保證機器人有一定自平衡能力,結構設計主要包括對密封艙和推進系統進行設計[2]。
密封艙是設備的搭載倉,應保證其剛度并設計成流線型以減少阻力。密封艙還是主要的浮力材料,為保證氣密性和安全性,在接線孔處使用膠水灌封,在接口處采用密封圈密封,以實現防水效果[3]。
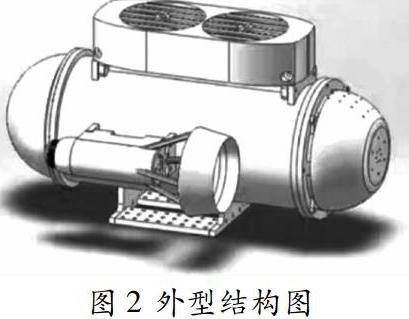
推進系統設計的關鍵是確定推進器的數量及排布方式,這會使機器人具有不同的自由度及機動性能[4]。本設計使用4個推進器,在水平面雙推進器平行布置,垂直面雙推進器對稱分布,使其具有良好的穩定性,外型結構如下圖所示。
2.2 硬件電路
硬件電路設計應保證穩定性和抗干擾性,對元件的選擇主要包括:主控板、電源、推進器、信號接收裝置和各類傳感器。
主控板:選用Raspberry Pi 3B+,它能通過SSH、遠程桌面或者顯示器連接顯示界面,能直接在界面進行編程,對GPIO口進行操作,還可調用強大的Wring Pi庫函數,其輸出穩定、調試方便、擴展性強,滿足本設計需求。
電源:選用20000mAh電源,續航時間長且充電方便,通過升壓模塊能滿足主控板、推進器和各類傳感器不同的供電需求。
推進器:選用無刷直流電機,其轉矩大,啟動電流小,制動特性好,電機使用無刷電調驅動,因為電調可以精確控制電機轉速和改變其旋轉方向。在電調信號線與樹莓派GPIO口接線時應加入光耦隔離器,防止電源不穩定損壞樹莓派,也能抑制電調電流對樹莓派產生信號干擾。
信號接收裝置:樹莓派自帶WiFi模塊,但電磁波在水中會被削弱,機器人只能在很小范圍接收到信號,搭載2.4G信號浮標,能使機器人及時接收到指令。
傳感器:搭載PH、溫度、濁度等傳感器,使機器人具備水質檢測的能力;搭載深度傳感器,便于對不同深度水質進行記錄;搭載MPU6050傳感器,對自身姿態信息采集,通過PID算法調整姿態,防止偏移和側翻。
3 軟件系統設計
3.1 上位機
上位機主要實現指令發送、數據接收、數據存儲和預警功能。設定上位機為服務器端,使用Labview為開發工具,通過主機名或者IP地址與端口號建立偵聽,等待客戶端連接。
界面中設置自主模式和遙控模式,在自主模式下,機器人根據預設軌跡運行并采集數據,在遙控模式下,機器人通過接收指令來完成一系列操作;當數據傳回上位機時,將顯示在頁面并存入數據庫,經系統計算分析,參數若超出相關標準則預警。
3.2 下位機
下位機主要實現數據采集、數據存儲和數據傳輸功能。下位機為客戶端,首先建立socket套接字,然后用bind函數綁定服務端IP地址,調用connect函數向服務器端發送連接請求,當服務器端接收并連接成功后,就可雙向通信進行數據交換。
機器人接到上位機指令后進行數據解析,然后改變輸出PWM,從而改變速度和方向,當不確定因素導致機器人不穩定時,機器人可以根據當前姿態應用PID算法進行自動偏航矯正;機器人收到下潛指令后,每下潛均勻深度時檢測水質水質檢測,然后按程序中設定的規則將所處的深度和各項水質參數發送給上位機,下潛一定深度或一段時間后自動上浮;機器人還能對電量進行監測,電量不足15%則自動上浮。
4 結語
本文介紹了一種基于樹莓派的小型水下機器人設計與實現方法,從總體設計、硬件結構設計和軟件系統設計方面進行了闡述,分析了設計關鍵和設計過程中應注意的相關問題,機器人性能良好,滿足水質檢測要求,設計方法可供參考。
參考文獻:
[1]劉世祿.關于推進我國水產養殖業穩步、可持續發展的戰略思考[A].中國水產學會、四川省水產學會.2016年中國水產學會學術年會論文摘要集.
[2]金碧霞,方勇.用于水下安保的ROV總體結構設計[J].機械研究與應用,2014,27(02):141-144+147.
[3]黎柱坤,王慧,林冰勝,張宇航,吳華宇,黃光煒,陳春雷,王驥.用于水產養殖的水下機器人設計與制作[J].電子世界,2017(15):36-39.
[4]高芬.一種小型消費級水下機器人的設計與實現方法[J].機電信息,2019(20):115-116.
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2021年13期)2021-07-28 07:15:50
當代水產(2019年1期)2019-05-16 02:42:04
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
中國房地產業(2016年2期)2016-03-01 01:25:23
中國房地產業(2016年24期)2016-02-16 06:10:22
機電信息(2014年27期)2014-02-27 15:53:56