基于聯(lián)合稀疏區(qū)域生長(zhǎng)的遙感飛機(jī)檢測(cè)算法
2020-05-18 12:02:34寧晨鄧梁王鑫
現(xiàn)代信息科技 2020年20期
寧晨 鄧梁 王鑫


摘? 要:針對(duì)高分遙感圖像中的飛機(jī)目標(biāo),文章提出了一種基于改進(jìn)FastMBD和聯(lián)合稀疏區(qū)域生長(zhǎng)的精確目標(biāo)檢測(cè)算法。首先,基于遙感圖像的特性,利用局部區(qū)域顯著性對(duì)FastMBD算法進(jìn)行改進(jìn),克服其先驗(yàn)假設(shè)不足;接著,利用內(nèi)外顯著比值實(shí)現(xiàn)顯著目標(biāo)檢測(cè);最后,基于聯(lián)合稀疏提出了一種區(qū)域生長(zhǎng)算法,補(bǔ)全因目標(biāo)分割導(dǎo)致的殘缺,同時(shí)基于HOG與SIFT特征,實(shí)現(xiàn)了最終目標(biāo)檢測(cè)。將提出方法在DOTA數(shù)據(jù)集上進(jìn)行實(shí)驗(yàn),結(jié)果表明了提出的方法的優(yōu)越性。
關(guān)鍵詞:遙感圖像;目標(biāo)檢測(cè);聯(lián)合稀疏表示;顯著性;FastMBD
中圖分類號(hào):TP751? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2096-4706(2020)20-0031-04
Remote Sensing Aircraft Detection Algorithm Based on Joint Sparse Area Growth
NING Chen1,DENG Liang2,WANG Xin2
(1.School of Computer and Electronic Information,Nanjing Normal University,Nanjing? 210023,China;
2.College of Computer and Information,Hohai University,Nanjing? 211100,China)
Abstract:Aiming at aircraft target in high resolution remote sensing image,an accurate target detection algorithm based on improved FastMBD and joint sparse area growth is proposed in this paper. First of all,based on the characteristics of remote sensing image,the FastMBD algorithm is improved by using the local region saliency to overcome the deficiency of prior hypothesis. Then,the saliency target detection is realized by using the internal and external saliency ratio. Finally,an area growth algorithm based on joint sparse is proposed to complete the defects caused by target segmentation. At the same time,the final target detection is realized based on HOG and SIFT features. The proposed method is tested on DOTA data set,and the results show the superiority of the proposed method.
Keywords:remote sensing image;target detection;joint sparse representation;saliency;FastMBD
0? 引? 言
在遙感圖像處理和理解中,對(duì)軍用或民用飛機(jī)目標(biāo)的檢測(cè)具有重大的理論意義和應(yīng)用價(jià)值。但由于遙感圖像搜尋區(qū)域大、目標(biāo)小,而且飛機(jī)形狀、姿態(tài)、背景干擾復(fù)雜多變,對(duì)飛機(jī)目標(biāo)的檢測(cè)往往存在誤檢,因此如何準(zhǔn)確地檢測(cè)遙感圖像中的飛機(jī)目標(biāo)是一個(gè)具有挑戰(zhàn)性的課題[1,2]。南京師范大學(xué)所屬省級(jí)光電技術(shù)重點(diǎn)實(shí)驗(yàn)室與河海大學(xué)通信與信息系統(tǒng)研究所在國(guó)家自然科學(xué)基金和中央高校專項(xiàng)資金的支持下,聯(lián)合在此領(lǐng)域展開了研究,并獲得了包括本文在內(nèi)的一系列成果。
近年來(lái),顯著性模型[3]已被證明是一種有效的目標(biāo)預(yù)檢測(cè)技術(shù),其中快速最小障礙距離(Fast Minimum Barrier Distance,F(xiàn)astMBD)算法[4]就是兼具目標(biāo)檢測(cè)效果和計(jì)算效率的檢測(cè)模型。但是,因?yàn)镕astMBD算法是基于目標(biāo)位于待測(cè)區(qū)域中心假設(shè)的,當(dāng)遙感圖像存在大量目標(biāo)時(shí),這一假設(shè)被削弱,導(dǎo)致召回率大幅降低。本文提出基于改進(jìn)FastMBD的顯著性檢測(cè),通過將增強(qiáng)對(duì)比度的后處理局限于一個(gè)一個(gè)的局部區(qū)域,從而避開FastMBD原假設(shè),提高了召回率。另外,顯著圖的閾值分割過程會(huì)因?yàn)殛幱罢趽醯纫蛩禺a(chǎn)生目標(biāo)殘缺現(xiàn)象,影響最終檢測(cè)效果。因此,本文將聯(lián)合稀疏[5]引入?yún)^(qū)域生長(zhǎng)算法,提出了基于聯(lián)合稀疏的區(qū)域生長(zhǎng)算法,對(duì)顯著圖閾值分割結(jié)果進(jìn)行補(bǔ)全,以保證目標(biāo)完整性,提高特征點(diǎn)定位精度以及最終的召回率,作者在提出的改進(jìn)FastMBD初步設(shè)想基礎(chǔ)上,增加了聯(lián)合稀疏區(qū)域生長(zhǎng)的算法優(yōu)化,進(jìn)一步提高了算法性能,同時(shí),本文還給出詳細(xì)的實(shí)驗(yàn)分析以及結(jié)論,進(jìn)一步構(gòu)成了完整的研究思路。
1? 提出的方法
本文提出算法的原理框圖如圖1所示,本文算法可分為兩個(gè)階段:顯著目標(biāo)預(yù)檢測(cè)和基于聯(lián)合稀疏區(qū)域生長(zhǎng)的精確檢測(cè)。在預(yù)檢測(cè)階段,首先計(jì)算輸入遙感圖像的改進(jìn)FastMBD顯著圖,進(jìn)行自適應(yīng)融合,突出其一致性。再利用內(nèi)外能量比值對(duì)顯著圖進(jìn)行顯著目標(biāo)提取,最后將SVM與KNN級(jí)聯(lián)構(gòu)成綜合檢測(cè)器,提高檢測(cè)精度。在精確檢測(cè)階段,基于聯(lián)合稀疏的區(qū)域生長(zhǎng)方法,先將丟失特征點(diǎn)的疑似目標(biāo)通過顏色模型轉(zhuǎn)換獲取參考圖像;再以殘缺目標(biāo)像素作為種子,對(duì)整個(gè)參考圖像進(jìn)行聯(lián)合稀疏重構(gòu),對(duì)重構(gòu)殘差比值進(jìn)行閾值分割和膨脹判別即可完成區(qū)域生長(zhǎng);最后利用KNN匹配補(bǔ)充漏檢目標(biāo)。
1.1? 基于改進(jìn)FastMBD的顯著目標(biāo)預(yù)檢測(cè)
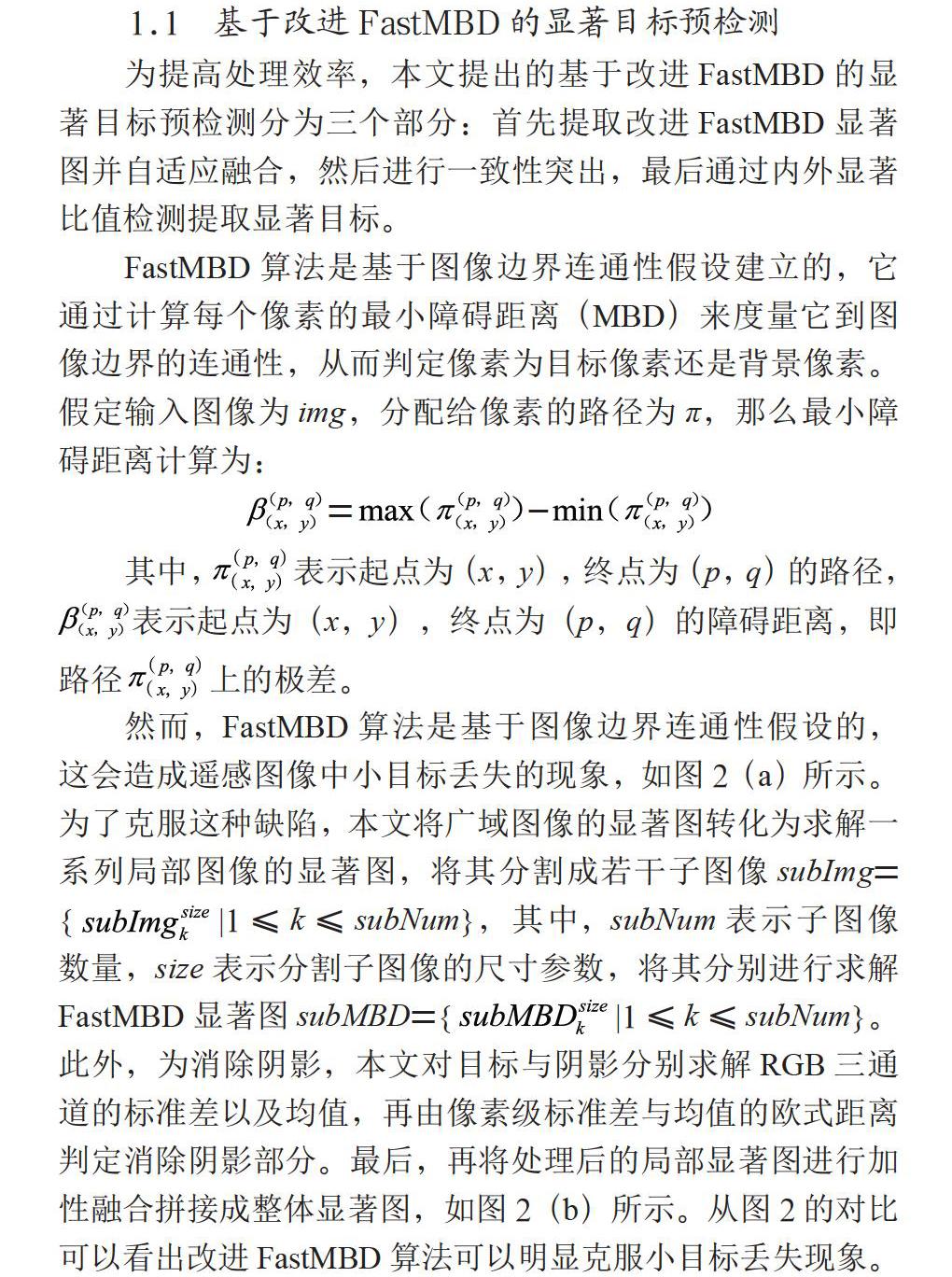
為提高處理效率,本文提出的基于改進(jìn)FastMBD的顯著目標(biāo)預(yù)檢測(cè)分為三個(gè)部分:首先提取改進(jìn)FastMBD顯著圖并自適應(yīng)融合,然后進(jìn)行一致性突出,最后通過內(nèi)外顯著比值檢測(cè)提取顯著目標(biāo)。
FastMBD算法是基于圖像邊界連通性假設(shè)建立的,它通過計(jì)算每個(gè)像素的最小障礙距離(MBD)來(lái)度量它到圖像邊界的連通性,從而判定像素為目標(biāo)像素還是背景像素。假定輸入圖像為img,分配給像素的路徑為π,那么最小障礙距離計(jì)算為:
其中, 表示起點(diǎn)為(x,y),終點(diǎn)為(p,q)的路徑,? 表示起點(diǎn)為(x,y),終點(diǎn)為(p,q)的障礙距離,即路徑 上的極差。
然而,F(xiàn)astMBD算法是基于圖像邊界連通性假設(shè)的,這會(huì)造成遙感圖像中小目標(biāo)丟失的現(xiàn)象,如圖2(a)所示。為了克服這種缺陷,本文將廣域圖像的顯著圖轉(zhuǎn)化為求解一系列局部圖像的顯著圖,將其分割成若干子圖像subImg=
{|1≤k≤subNum},其中,subNum表示子圖像數(shù)量,size表示分割子圖像的尺寸參數(shù),將其分別進(jìn)行求解FastMBD顯著圖subMBD={|1≤k≤subNum}。此外,為消除陰影,本文對(duì)目標(biāo)與陰影分別求解RGB三通道的標(biāo)準(zhǔn)差以及均值,再由像素級(jí)標(biāo)準(zhǔn)差與均值的歐式距離判定消除陰影部分。最后,再將處理后的局部顯著圖進(jìn)行加性融合拼接成整體顯著圖,如圖2(b)所示。從圖2的對(duì)比可以看出改進(jìn)FastMBD算法可以明顯克服小目標(biāo)丟失現(xiàn)象。
1.2? 基于聯(lián)合稀疏區(qū)域生長(zhǎng)的飛機(jī)目標(biāo)精確檢測(cè)
在去除陰影的時(shí)候,目標(biāo)有可能因?yàn)殛幱暗日趽踉斐砷撝捣指顣r(shí)誤分割部分目標(biāo)至背景,這會(huì)造成形狀和特征的不完整。為補(bǔ)全殘缺并檢測(cè)出漏檢目標(biāo),本文作者受到先前所從事的利用聯(lián)合稀疏重構(gòu)算法對(duì)遙感目標(biāo)進(jìn)行識(shí)別案例[6,7]的啟發(fā),提出使用基于聯(lián)合稀疏區(qū)域生長(zhǎng)對(duì)飛機(jī)目標(biāo)進(jìn)行精確檢測(cè),分為聯(lián)合稀疏重構(gòu)、閾值分割以及KNN檢測(cè)三個(gè)階段。
聯(lián)合稀疏重構(gòu)階段中,首先對(duì)殘缺目標(biāo)所在局部區(qū)域?qū)?yīng)的原圖通過顏色模型轉(zhuǎn)換和計(jì)算顯著圖等手段生成更多通道,將其組成參考圖像,然后以殘缺目標(biāo)對(duì)應(yīng)像素作為種子像素,對(duì)應(yīng)的參考向量組合即可形成字典,再以此對(duì)整個(gè)參考圖像進(jìn)行聯(lián)合稀疏重構(gòu)。最后比上顯著信息即可得到重構(gòu)殘差比值,如此可增強(qiáng)最終結(jié)果中目標(biāo)與背景的差異性。閾值分割階段主要是為了避免聯(lián)合稀疏重構(gòu)結(jié)果手工挑選閾值,減少參數(shù)影響,對(duì)重構(gòu)殘差比值進(jìn)行閾值分割過后,簡(jiǎn)單膨脹殘缺目標(biāo)并聯(lián)合分割結(jié)果即可判別是否需要補(bǔ)全,完成區(qū)域生長(zhǎng)任務(wù)。然后對(duì)補(bǔ)全目標(biāo)提取SIFT特征,進(jìn)行KNN匹配,即可完成精確檢測(cè)任務(wù)。
在本文區(qū)域生長(zhǎng)部分,將分割出的殘缺目標(biāo)本身視為種子像素,此時(shí)每個(gè)像素對(duì)應(yīng)一個(gè)參考向量,本文采用聯(lián)合稀疏模型的思路,假設(shè)同一個(gè)局部區(qū)域內(nèi)部像素對(duì)應(yīng)的參考向量可以用一組共享的原子線性表出,那么就可以將多個(gè)像素對(duì)應(yīng)的參考向量視為同一批,同時(shí)進(jìn)行重構(gòu)判別,最終形成基于聯(lián)合稀疏重構(gòu)的生長(zhǎng)準(zhǔn)則。聯(lián)合稀疏重構(gòu)問題可以用下列優(yōu)化式表示:
?=arg min‖RDA-part‖? ? s.t.‖A‖row,0≤K0
其中,殘缺目標(biāo)對(duì)應(yīng)的參考向量為RD=[rd1,…],將其作為重構(gòu)字典。A表示對(duì)應(yīng)的稀疏系數(shù),其在聯(lián)合稀疏框架下,具有共享稀疏模式,即字典原子選取相同。‖A‖row,0表示對(duì)A求聯(lián)合稀疏范數(shù)。K0為聯(lián)合稀疏范數(shù)的上界。
2? 實(shí)驗(yàn)與分析
2.1? 評(píng)價(jià)指標(biāo)與實(shí)驗(yàn)環(huán)境
本機(jī)配置為Intel(R) Core(TM) I5 4210M @ 2.60 GHz 12 GB內(nèi)存,軟件是Spyder 3.2.6,語(yǔ)言是Python。訓(xùn)練集與測(cè)試集的數(shù)量比約為2:1,一共挑選了786個(gè)飛機(jī)目標(biāo)作為測(cè)試目標(biāo),測(cè)試圖像分辨率最大可達(dá)1 200像素×1 600像素,而目標(biāo)尺寸約為80像素×80像素。
實(shí)驗(yàn)采用召回率(Recall)、精確率(Precision)和F度量值等評(píng)價(jià)指標(biāo)來(lái)進(jìn)行分析,通過評(píng)價(jià)指數(shù)說(shuō)明本文提出的目標(biāo)檢測(cè)算法的優(yōu)越性。
2.2? 結(jié)果與分析
我們分別給出三種場(chǎng)景下本文檢測(cè)算法的檢測(cè)結(jié)果,如圖3~圖5所示。可以看出本文算法可以很好地對(duì)遙感圖像中的飛機(jī)目標(biāo)進(jìn)行精確檢測(cè)。同時(shí),為說(shuō)明本文提出的改進(jìn)步驟的有效性,我們將本文算法與兩種相關(guān)算法進(jìn)行對(duì)比。這三種方法分別為:
方法1:基于傳統(tǒng)FastMBD的顯著目標(biāo)檢測(cè)方法,后續(xù)使用HOG和SIFT進(jìn)行進(jìn)一步識(shí)別;
方法2:基于改進(jìn)FastMBD的顯著目標(biāo)檢測(cè)方法,后續(xù)使用HOG和SIFT進(jìn)行進(jìn)一步識(shí)別;
方法3:基于改進(jìn)FastMBD與聯(lián)合稀疏區(qū)域生長(zhǎng)的檢測(cè)方法(本文提出的方法)。
表1給出這三種目標(biāo)檢測(cè)算法的性能比較結(jié)果,包括目標(biāo)檢測(cè)的三個(gè)參數(shù):召回率、精確率和F度量值。其中,F(xiàn)度量值是召回率和精確率的調(diào)和均值,反應(yīng)目標(biāo)檢測(cè)算法的總體性能。由表1可知,方法1與方法2對(duì)比可見改進(jìn)FastMBD的優(yōu)化必要性,而方法3加入聯(lián)合稀疏區(qū)域生長(zhǎng)算法以后,召回率明顯提升,顯然該算法能通過補(bǔ)全目標(biāo)來(lái)召回原本缺失、偏移的特征點(diǎn),從而提高SIFT的匹配性能。由此可見,在本文檢測(cè)算法中,利用局部區(qū)域顯著性對(duì)FastMBD算法進(jìn)行改進(jìn),克服其先驗(yàn)假設(shè)不足,同時(shí),基于聯(lián)合稀疏的區(qū)域生長(zhǎng)算法可補(bǔ)全因目標(biāo)分割導(dǎo)致的殘缺,從而最終提高F度量值等性能。根據(jù)表中與其他目標(biāo)檢測(cè)算法的比較,可看出本文算法的優(yōu)異性能。
3? 結(jié)? 論
本文提出一種基于改進(jìn)FastMBD與聯(lián)合稀疏區(qū)域生長(zhǎng)的遙感飛機(jī)檢測(cè)算法,該算法主要分為顯著目標(biāo)預(yù)檢測(cè)與區(qū)域生長(zhǎng)精確檢測(cè)兩個(gè)階段。在顯著目標(biāo)預(yù)檢測(cè)階段,本文將對(duì)比度增強(qiáng)操作局限于子區(qū)域,并引入加性融合,將不同尺寸的局部顯著圖融合以提升最終的目標(biāo)檢測(cè)召回率,并基于內(nèi)外顯著比值進(jìn)行了顯著目標(biāo)檢測(cè)。同時(shí),由于形狀特征對(duì)目標(biāo)形狀完整性要求較高,而顯著檢測(cè)以后的閾值分割圖不能保證其完整性,因此,在區(qū)域生長(zhǎng)階段中,本文聯(lián)合稀疏引入?yún)^(qū)域生長(zhǎng)算法,基于區(qū)域生長(zhǎng)的形狀補(bǔ)完操作提高了特征點(diǎn)的定位精度,最終提升了光學(xué)遙感飛機(jī)目標(biāo)檢測(cè)的召回率。
參考文獻(xiàn):
[1] YU Y T,GUAN H Y,JI Z. Rotation-Invariant Object Detection in High-Resolution Satellite Imagery Using Superpixel-Based Deep Hough Forests [J]. IEEE Geoscience and Remote Sensing Letters,2015,12(11):2183–2187.
[2] LI B Y,CUI X G,BAI J. A cascade structure of aircraft detection in high resolution remote sensing images [C]//2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). IEEE,2016:653-656.
[3] WANG X,NING C,XU L Z. Saliency detection using mutual consistency-guided spatial cues combination [J]. Infrared Physics & Technology,2015,72:106-116.
[4] Zhang J M,Sclaroff S,Lin Z,et al. Minimum Barrier Salient Object Detection at 80 FPS [C]// 2015 IEEE International Conference on Computer Vision (ICCV). IEEE,2015:1404-1412.
[5] Zhang Y X,Du B,Zhang L P,et al. Joint Sparse Representation and Multitask Learning for Hyperspectral Target Detection [J]. IEEE Transactions on Geoscience and Remote Sensing,2017,55(2):894-906.
[6] NING C,LIU W B,ZHANG G,et al. Enhanced synthetic aperture radar automatic target recognition method based on novel features [J]. Applied Optics,2016,55(31):8893-8904.
[7] NING C,LIU W B,ZHANG G,et al. Synthetic Aperture Radar Target Recognition Using Weighted Multi-Task Kernel Sparse Representation [J]. IEEE Access,2019,7:181202-181212.
作者簡(jiǎn)介:寧晨(1978—),男,漢族,安徽阜陽(yáng)人,講師,博士,主要研究方向:圖像處理、機(jī)器學(xué)習(xí);鄧梁(1994—),男,漢族,湖南長(zhǎng)沙人,碩士研究生,主要研究方向:圖像處理、模式識(shí)別;王鑫(1981—),女,漢族,安徽阜陽(yáng)人,副教授,博士,主要研究方向:圖像處理、模式識(shí)別、計(jì)算機(jī)視覺、機(jī)器學(xué)習(xí)。