基于組合定位的現代有軌電車雷達防撞系統設計
2020-05-18 11:18:18王萌
鐵道標準設計 2020年5期
王 萌
(中國鐵道科學研究院,北京 100081)
隨著我國國民經濟和社會的發展,城市交通擁堵問題變得日益嚴重,大力發展公共交通成為解決城市交通擁堵問題的關鍵。現代有軌電車因相對公共汽車更加節能環保,運力更大,相對地鐵輕軌造價更低而得到大力發展,預計至2020年,中國將建設2 000 km的有軌電車線路,有著廣闊的市場發展前景。現代有軌電車運行線路非完全封閉,社會交通與有軌電車混行,而國內復雜的社會交通情況,使得有軌電車的運營安全存在較多的隱患,目前各個城市有軌電車的試驗或運營過程中均發生了一些程度不同的事故,如何在目前有軌電車非完全封閉、半獨立路權等運營條件下對司機人工駕駛提供必要的提醒,降低事故發生幾率,是有軌電車逐步朝著智能化運營發展的基礎,也是一個值得眾多學者研究的問題。梁影等[1]提出了一種基于雷達的可對目標限界關系進行報警輸出的有軌電車預警系統;趙振翔等[2]提出了采用2套傳感器基于模糊控制原理對測量向量異步數據融合,并給出報警信號的有軌電車防撞系統;夏玉潔[3]等人提出了一種在多目標聯合狀態下的加權采樣思想,并在此基礎上引入優化的基本粒子濾波算法,從而提高目標軌跡的跟蹤精確度;宋喜玉等[4]在比較現有MIMO雷達資源分配研究方法后,提出了一種新的多目標跟蹤下的分布式MIMO雷達資源聯合優化算法;蒙廣元等[5]在VC++環境下設計開發了一套基于MapX組件的雷達目標跟蹤模擬系統。同時,目前國內外許多學者對有軌電車的定位問題展開研究,定位方法大多采用GPS/BD/INS等組合定位方法[6-13]。目前有專家學者將GPS/北斗導航的定位監控應用于民航業的超低空飛行預警,通過4G網絡接收定位數據,經防撞系統處理后給出告警信息[14]。然而,對于有軌電車定位與防撞系統的聯合研究及應用缺乏關注。因有軌電車行駛路線固定且提前已知,所以在掌握其當前位置的情況下,可直接確定前方路線條件,從而根據軌道路徑確定有軌電車行駛的安全區域,極大程度篩選雷達傳感器檢測到的眾多目標,降低系統的誤報警率。
1 系統總體設計
本文所研究的雷達防撞系統用于探測現代有軌電車的運行環境,基于雷達、組合定位等非接觸的綜合檢測方式,在各種惡劣條件下,實現有軌電車的正面和側面防撞預警。
系統中設計雷達發射天線、接收天線,用以測量障礙物在列車前方的距離和相對列車前進軸線的方位角。雷達的探測范圍為0~210 m,根據電車的最高速度和最大制動加速度進行計算,得出電車制動距離,當障礙物與電車的距離小于電車制動距離時,進入跟蹤處理程序。
根據通號軌道車輛有限公司公布的現代有軌電車主要參數可查得:有軌電車軌距1 435 mm,車輛長度33 550 mm,車輛寬度2 650 mm。以車體外輪廓500 mm處為安全限界,則單側距軌軸線1 820 mm以外區域可認定為安全區域。如圖1所示,綠線以外為安全區域。
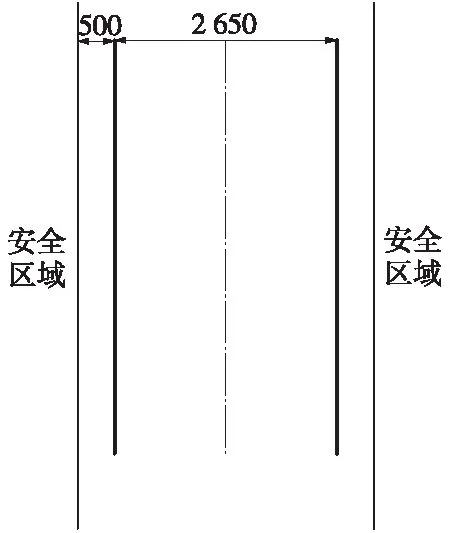
圖1 防撞系統限界(單位:mm)
系統的軟硬件結構設計方面,系統硬件框圖如圖2所示。系統的硬件模塊包括采集GPS及RFID數據的定位數據處理模塊,采集雷達探測信息的雷達數據模塊,這兩個模塊將收集到的數據通過車載計算機對比處理,判斷行車安全信息。其中車輛前方障礙物的檢測由雷達來完成,前方界限的劃定及安全區域范圍由定位模塊通過獲取定位數據得到線路信息確定。顯示器與報警模塊作為人機交互接口,為司機提供直觀的報警信息。
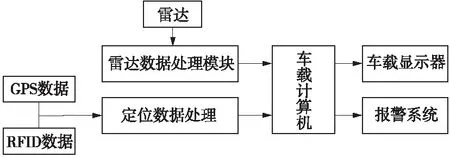
圖2 系統硬件框圖
系統的軟件包含系統信息顯示模塊、雷達數據接收模塊、雷達數據處理模塊、雷達圖形顯示模塊、雷達目標數據存儲模塊、定位數據接收模塊、定位數據處理模塊和數據融合模塊等,系統的軟件組成框圖如圖3所示。當系統開始正常工作后,雷達數據接收模塊將采集到的數據傳給數據處理模塊處理,定位數據接收模塊將接收到的數據交給處理模塊處理,數據融合模塊將處理后的定位數據及雷達數據融合后在界面顯示模塊中顯示。
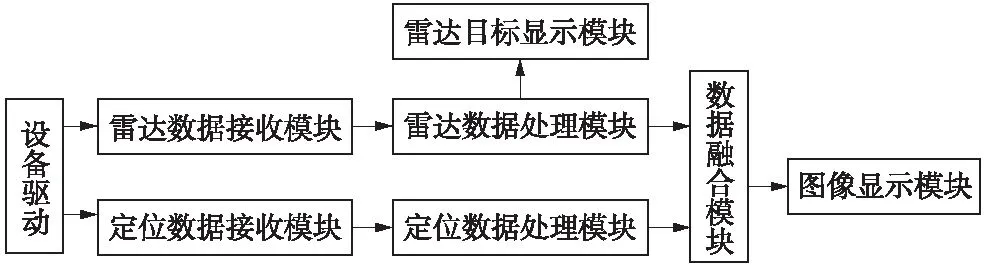
圖3 系統軟件框圖
2 組合定位模塊設計
目前軌道交通常見的定位技術主要有衛星定位、RFID定位,慣導定位、軌道電路及應答器定位等。然而衛星定位技術易受高樓、隧道等結構物影響;RFID需要大量標簽才能保障定位精度;慣性傳感器易產生累計誤差;軌道電路與地面應答器需前期鋪設好地面設備且不適應現代有軌電車非獨立路權的復雜運行環境。之前大多學者采用的有軌電車組合定位方式為多種衛星導航系統組合使用或是衛星定位系統與慣性傳感器的組合系統,如孫永梅等提出以GPS為主,航位推算為輔的定位方式[15],石建強等提出通過自適應卡爾曼算法處理GNSS與IMU兩種傳感器數據的定位方式[16]。但這些組合定位方式前者無法克服衛星定位本身的劣性影響,后者采用的設備價格較高無法滿足實際社會需求。因此,從生產實際出發,提出一種更適應市場的衛星定位與RFID定位組合的定位方式。
全球定位系統(GPS,Global Positioning System)為一種利用GPS衛星進行定位的具有全方位、全天候、全時段、高精度的衛星導航系統。射頻識別技術(RFID,Radio Frequency Identification)又稱電子標簽,是一種利用射頻信號自動識別目標對象并獲取相關信息的技術。采用GPS與RFID的組合定位方式,可在有軌電車運行線路中,對GPS信號弱及拐彎、路口等復雜路況增加RFID標識點密度,其余位置正常設置標識點的方式,提高整體定位精度。
有軌電車防撞系統中組合定位模塊,根據有軌電車實際運行線路,可調整射頻識別標(TAG)的放置位置和距離。如圖4所示,在GPS信號較強且未設置TAG的路段,可僅對接收到的GPS信號進行處理,輸出GPS定位信息。在GPS信號強但較復雜的路段,為保證防撞系統整體的安全性和穩定性可增加TAG的數量,同時處理GPS和RFID的數據,最后輸出組合定位系統的定位信息。在GPS信號較弱的路段,可通過設置TAG的方式彌補GPS的不足,當未檢測到GPS信號時僅對RFID數據處理,輸出定位信息。
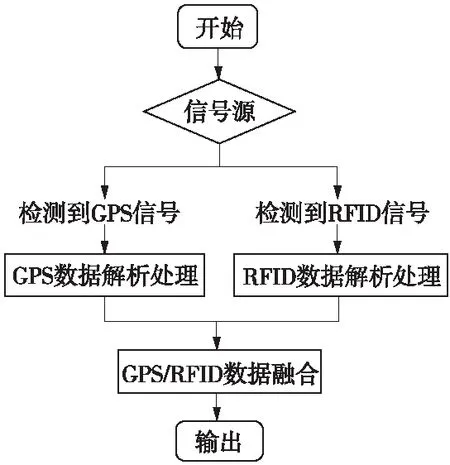
圖4 定位模塊數據處理流程
定位模塊采集到數據信息,經過濾波處理輸出。目前有學者提出通過卡爾曼濾波處理有軌電車組合定位模塊數據,已修正數據結果,提高定位系統的準確性[17]。在對卡爾曼濾波、擴展卡爾曼濾波、無跡卡爾曼濾波進行比較后[18-19],發現卡爾曼濾波對非線性系統的濾波效果較差,無跡卡爾曼濾波雖會一定程度的增加運算精度和穩定性,但會帶來較大的運算量且對模型所產生的誤差較為敏感。因此,采用擴展卡爾曼濾波進行組合定位模塊數據的處理。
建立連續時間擴展卡爾曼濾波模型,系統方程如下
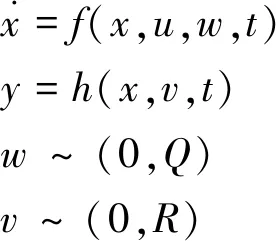
(1)
式中,x為狀態量;y為輸出量;u為控制量;w和v為噪聲;系統方程f(·)和量測方程h(·)為非線性函數。
利用泰勒級數展開,得到

(2)
xk=fk-1(xk-1,uk-1,wk-1)
(3)
用偏微分對當前狀態做估計
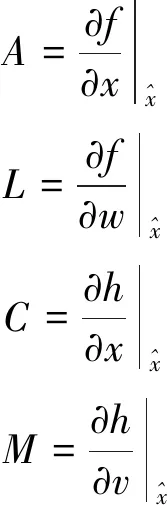
(4)
假設系統各設備均已校準無初始誤差,系統的標稱噪聲值為零,即w0=0,v0=0,則卡爾曼濾波方程為
(5)
其中,P為估計誤差的協方差,K為濾波增益,且

(6)
3 雷達探測模塊設計
在對紅外線、超聲波、激光測距、毫米波雷達測距這4種雷達傳感器進行比較后發現,前3種采用聲光原理設計出的有軌電車防撞雷達雖結構簡單,價格低廉,但容易受到惡劣氣象條件干擾,無法確保測距精度。綜合測距、測速、穩定性、價格等各方面因素考慮,本系統選擇ARS 408-21雷達傳感器作為有軌電車防撞系統傳感器。如圖5所示,該雷達為77G毫米波雷達,由發射器、天線及天線接收器、收發開關、接收機及顯示終端組成,可用于探測靜態目標和運動目標的跟蹤,目標數可達60個。具有多目標捕獲與區分;探測目標軌跡跟蹤;物體存在檢測;運動及運動方向檢測;測距(目標距雷達波發射點的距離);測角(目標相對雷達的水平方位角);測速(目標相對雷達位置的速度)等功能。
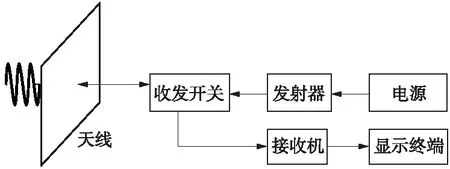
圖5 ARS 408-21雷達原理
根據現代有軌電車運營的實際情況,考慮到有軌電車的正常行駛速度較低,且行駛軌道確定以及選取毫米波雷達的采樣頻率較高,在分析比較目前學者采用的微分多項式模型、時間相關模型、半馬爾科夫模型后[20],選取CA和CV模型。同時對于交叉路口等比較復雜的運行環境,引入非線性的擴展卡爾曼濾波算法,對CA和CV算法的估測值進行修正,以保證本研究所采取的目標跟蹤算法的準確性和精確性。
CV(Constant Velocity)模型即目標做勻速直線運動

(7)
其連續系統的離散描述表達式為
(8)
式中,x′,x″,x?分別為運動目標的位置、速度和加速度分量;w(t)是均值為零,方差σ2的高斯白噪聲;T為測量數據的采樣周期。
CA(Constant Acceleration)模型即目標做勻加速直線運動
(9)
其連續系統的離散描述表達式為
(10)
式中,x′,x″,x?分別為運動目標的位置、速度和加速度分量,w(t)是均值為零,方差σ2的高斯白噪聲,T為測量數據的采樣周期。
如圖6所示,該系統掃描周期為50 ms以內,測量范圍為0~210 m,測距精度0.3 m,目標個數最大范圍可達500個,使用77 GHz頻段探測,最大探測速度可達180 km/h,速度精度為0.25 m/s,探測角度為45°±5°,雷達模塊可對有效范圍內物體進行探測,以達到有軌電車運行過程中防撞的效果。
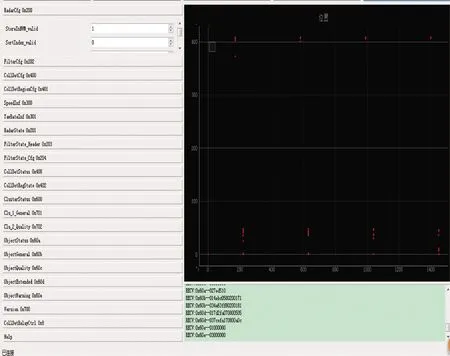
圖6 雷達探測模塊測試
4 數據處理及測試
本文對整體系統進行了車載測試,驗證了所設計的防撞系統的可行性和有效性。如圖7所示,防撞系統可根據定位信息確定安全范圍,通過雷達探測模塊對安全范圍內出現的目標跟蹤,并根據每個目標的位置作出告警等級判斷,向司機發出告警信息,很大程度提高有軌電車運行安全。
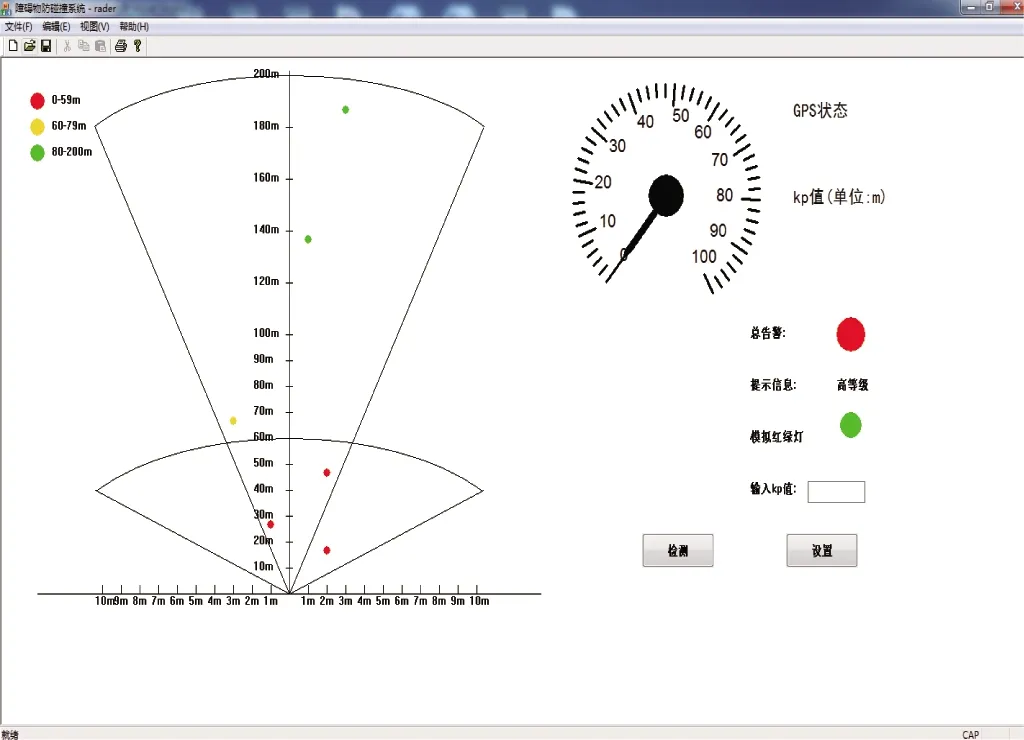
圖7 有軌電車防撞系統
5 結論
本文提出一種基于組合定位技術的現代有軌電車防撞系統設計方案。通過擴展卡爾曼濾波將GPS與RFID數據處理融合,解決了單一的GPS定位方式易受高樓、隧道等結構物影響,提高了系統穩定性和定位精度。根據定位信息實時確定列車所在位置的安全區域,結合雷達探測模塊檢測到的目標位置,將兩者數據信息進行對比處理。這兩種方法的結合可有效去除列車在十字路口、轉彎等復雜線路情況下產生的誤報警情況,作出安全判斷,對司機發出告警信號。實驗證明,該防撞系統可有效監測列車運行環境中各類障礙物,提高有軌電車運營安全。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28