基于通用性軟件的車載開關磁阻電機仿真實驗方法
2020-05-16 07:51:52鄧冉冉
實驗室研究與探索 2020年2期
欒 茹, 鄧冉冉, 張 然
(1.北京建筑大學電氣與信息工程學院,北京100044;2.建筑大數據智能處理方法研究北京市重點實驗室,北京100044)
0 引 言
在教育部提出2035年實現教育強國的大背景下,電氣工程及其自動化專業的本科教學,除了基本的必修教學環節外,還應該設置選修的創新型課程。根據電氣工程及其自動化專業面向的研究與就業的領域,電動汽車驅動系統是一個典型的能體現出創新性特征的教學內容之一,且這部分教學內容適合于在具備一定動手實踐條件的實驗室內實施教學過程,需要配置電動汽車驅動電機及其控制的整套實驗系統,這就對開設電氣工程及其自動化專業院校的實驗室建設提出了更高的要求。目前驅動電動汽車最理想的電機有兩種,一個是永磁電機,一個是開關磁阻電機(Switched Reluctance Motor,SRM),而對于未來的電動汽車驅動電機,為了擺脫對永磁材料的依賴,人們將關注的焦點不斷地投向開關磁阻電機[1]。車載開關磁阻電機的控制,是保證電動汽車合理可靠運行的充要條件,而控制離不開合理的建模,特別是對于像開關磁阻電機這樣具有強非線性因素的控制對象[2],其建模與控制問題解決起來難度大,始終是電力拖動與控制領域的研究熱點[3]。
研究SRM及其驅動系統的方法有兩種,一種是實驗法[4];另一種是仿真方法。實驗法耗時費力[5],投入經費很大,在不確定電機結構參數的情況下,有很多實驗模型缺乏制作的依據[6],且類似于磁場分布、脈動磁阻轉矩等數據,直接測量的可操作性很差[7],不具備普遍推廣性。仿真方法[8]不需要耗費大量的制作經費,若仿真理論成熟可靠,可以很方便地輸入不同的電機結構參數來使用,得到若干種設計與控制方案[9],從中進行比較,具備適用性與推廣性,是研究開關磁阻電機的首選方法。針對開關磁阻電機數學模型的強非線性,目前最有效的仿真方法是有限元法[10]。但傳統的有限元數值計算的專業性很強,本科生在短時間內很難上手,且在固定激勵源的情況下,只能獲得靜態的磁鏈、轉矩、電流等輸出量的數值解,還無法滿足仿真法需要具備的通用性與實時動態仿真的性能。
Infolytica是解決電磁設備及其系統工業設計問題的通用軟件,具備通俗易懂的參數輸入界面,學生即使不熟悉有限元數值計算也能夠上手操作,其后臺運算主要是建立在電磁場數值計算的基礎上,可以實現包括耦合運動過程的瞬態場在內的各種電磁過程的實時仿真,克服了傳統有限元法的局限性,具備通用與實時動態特性。但這種對非線性數理方程的實時動態仿真需要借助外圍電路提供動態激勵源,Infolatica軟件本身不具備搭建各種復雜控制電路的功能。鑒于此,本文將Infolytica軟件包中的MagNet軟件與Matlab中的Simulink仿真平臺結合起來,利用Simulink搭建轉速、電流閉環控制電路[11],將輸出結果作為動態激勵施加到MagNet建模里,實現對車載開關磁阻電機驅動系統的合理仿真[12]。將該仿真方法形成實驗指導書,與兩種仿真軟件一起安裝到實驗室電腦內。
1 Magnet軟件建立的SRM模型
1.1 SRM的數學方程
SRM定子第k相線圈的電路方程[13]如下:

式中:uk為施加到第k相定子線圈的相電壓;Rk為第k相定子線圈的電阻;ik為第k相定子線圈的瞬時電流;ψk為第k相定子線圈的磁鏈。設SRM驅動部分的主電路直流側激勵電源為E,采用常規傳統的換相方法,則單相定子電路對應的開通、關斷的激勵方程為:

式中:θ為轉子位置角;θon與θoff分別為開通角和關斷角。隨著電動汽車的起動、加速、穩速、減速、停止,要求車載SRM的轉速隨之發生相應的變化,因為直流側激勵電源為E常數,則SRM調速的效果只能靠開通角θon和關斷角θoff來實現[14-15]。由式(2)可見,不同的θon與θoff組合對應著不同的激勵源相電壓uk的變化周期,則每一相電路方程式(1)在不同變化周期激勵源作用下,也要產生不同的電磁場分布,可見,在電動汽車的整個行駛過程中,車載SRM內電磁場分布是實時動態變化的過程,不能簡單采用固定激勵源的有限元法進行仿真[16]。
1.2 SRM的動態有限元計算模型
本文以一臺三相12/8極SRM為例來說明動態有限元仿真過程,其具體參數見表1,該電機是后續實驗系統中的實際電機,將這些參數輸入到Magnet里就可以快速建模。為了能夠將動態激勵源實時施加到SRM有限元計算模型上,本文選擇全域建模法,即不考慮模型的對稱性,將SRM的整個定子、轉子作為求解域進行有限元數值計算,在MagNet軟件中的具體實現見圖1。
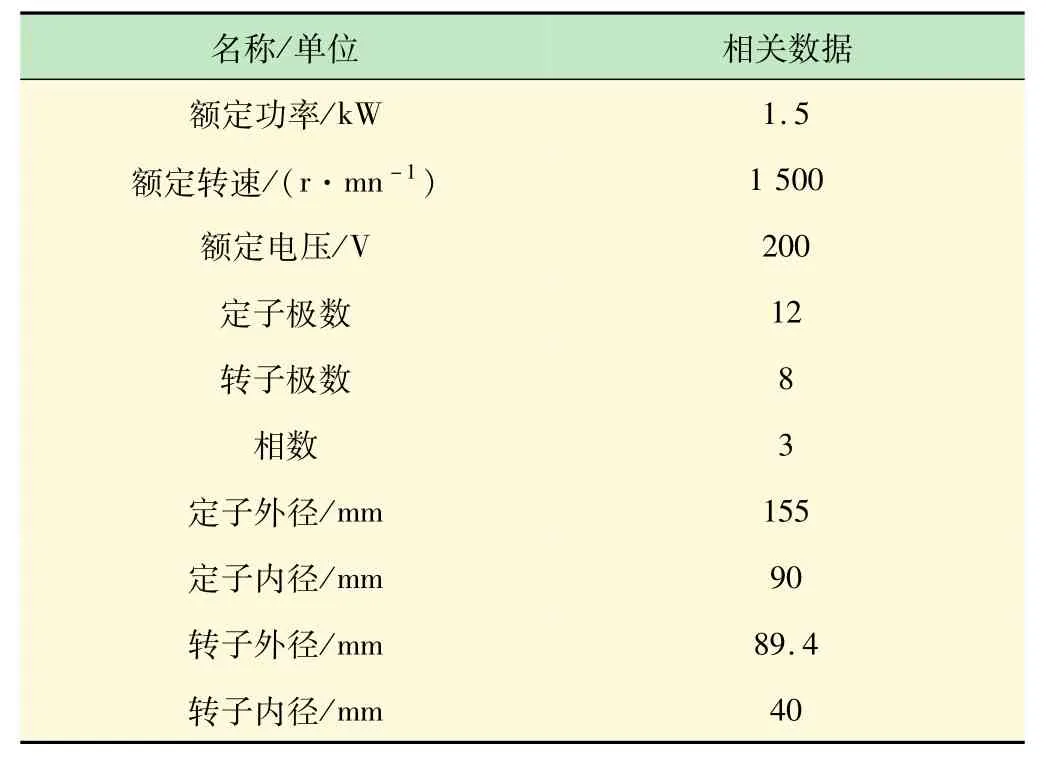
表1 三相12/8極開關磁阻電機結構參數
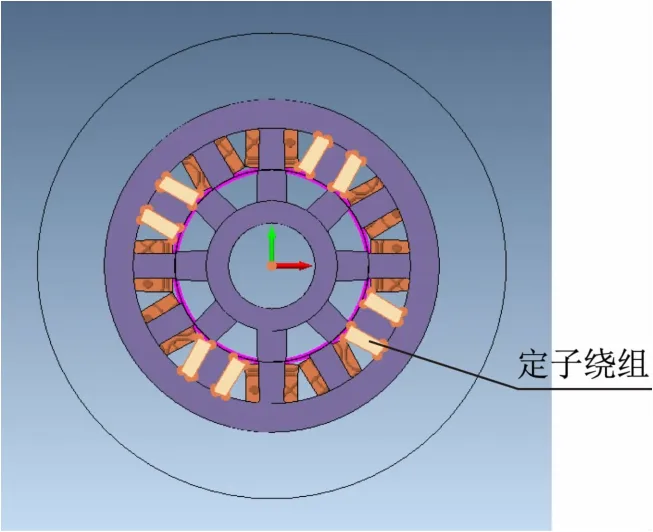
圖1 在Magnet軟件中建立的SRM模型
對圖1中定子各相繞組施加周期性的電壓斬波源,需要借助Simulink搭建外圍電路,即讓有限元計算過程中的各種數據在這兩種軟件之間傳遞,Infolytica軟件包為此提供了專門的內置插件,Magnet Plug-in,將該插件與Infolytica、Matlab一起安裝在同一個訪問路徑上,則MagNet軟件生成的有限元模型,作為一個仿真模塊,出現在Simulink的庫里,如圖2所示。有了這樣的結合,將MagNet有限元模型視作Simulink中的一個工具箱,完全可以按照Simulik思維模式搭建仿真電路,下面以最簡單的SRM電流斬波控制為例,介紹仿真過程。利用Simulink庫里各種電路模塊,搭建出一個典型的SRM電流斬波電路,該電路的輸出施加到Magnet有限元模型上,如圖3所示。從邏輯關系來看,代表SRM功率開關電源的模塊“converter”經過電流斬波后,通過6個電壓端子輸出電壓激勵信號,這些信號是根據SRM運行過程中的θon、θoff,以及電流斬波控制等要求,綜合判斷合成的動態電壓信號,施加到MagNet有限元模型的輸入端“V1”“V2”“V3”上,相當于SRM的三相電源電壓施加到圖1所示的有限元求解域中的三相定子繞組上,只要這三相電源電壓是動態激勵信號,相應的圖1中所示的有限元求解域的計算結果也是實時動態輸出的瞬態電磁場結果,因此,運用圖1中的有限元求解域及圖3中搭建的控制電路,可以準確模擬出SRM的起動過程,如圖4所示。
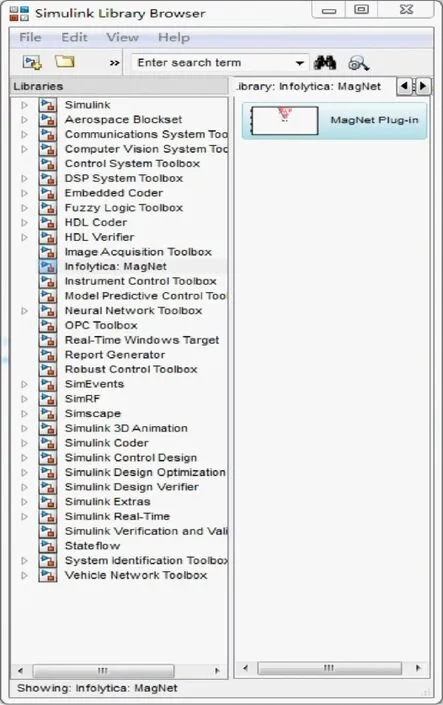
圖2 Simulink中的Magnet模塊
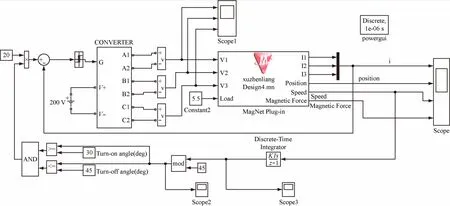
圖3 兩種軟件結合下的SRM動態有限元計算模型
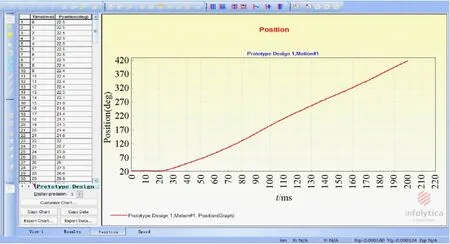
圖4 SRM動態有限元計算結果中的起動位移
2 結合復雜控制算法的車載SRM的仿真
圖1中用MagNet建立的SRM有限元模型的計算數據不僅可以直接輸出,而且還可以用于BP神經網絡訓練,將有限元數據進行非線性映射,以構造出復雜的控制算法。下面仍以表1所列的三相12/8極SRM為車載電機與BP神經網絡、轉矩分配函數、開關角的模糊控制等復雜控制算法相結合,運用MagNet與Simulink兩種軟件進行仿真,構造出具備轉速、電流閉環控制的車載SRM驅動控制系統。
2.1 MagNet有限元數據的神經網絡建模
與其他驅動電機一樣,對車載SRM轉矩的控制,仍需要通過定子電流來實現。由圖1中建立的SRM有限元模型,經過數值計算可以得到該SRM的磁鏈數據,ψ(ik,θ),為了實現對定子電流ik的控制,需要將磁鏈數據映射成定子電流數據。根據SRM電機的結構及工作原理,顯然這種映射是強非線性的,目前解決這種強非線性問題的最有效方法之一是神經網絡法,本文采用其中最簡單的BP神經網絡構造由磁鏈數據到電流數據的非線性映射,即:

這一過程是在Simulink仿真平臺上實現,然后再將這個過程進行封裝,如圖5所示。
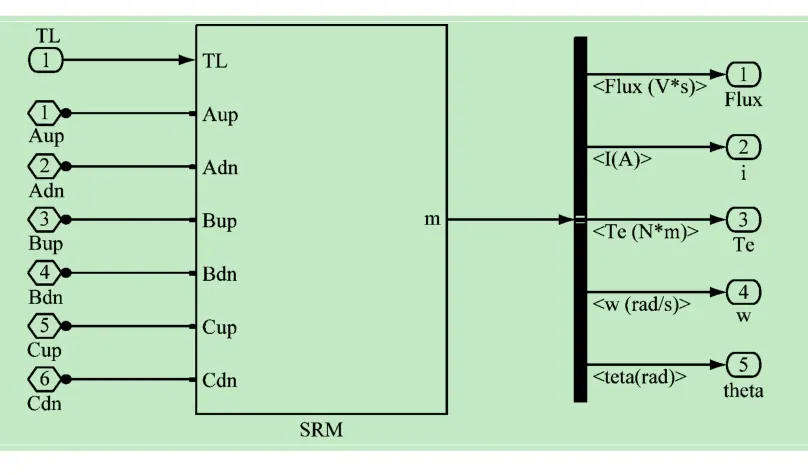
圖5 對BP神經網絡建模的封裝
圖5中輸入端的“1”~“6”,對應的是圖3中功率開關電源模塊“converter”的6個輸出端,并與其相連,圖5中的輸出端“m”是經過BP神經網絡訓練的瞬態電流數據、磁鏈數據、各相瞬時轉矩數據等,有了這樣的模型才可以用Simulink平臺搭建模糊開關角與轉矩分配函數控制的電路。
2.2 基于模糊轉矩分配法的車載SRM驅動系統控制的仿真
結合了模糊開關角與轉矩分配函數法,本文在Simulink中搭建了車載SRM的轉速、電流雙閉環的控制電路,如圖6所示。給定轉速與SRM實際轉速構造出轉速外環,轉速調節器輸出,作為期望轉矩,與經過模糊開關角模塊優化后的SRM θon、θoff,以及轉子位置角一起輸入到轉矩分配模塊TSF中,該模塊的輸出端T為SRM三相繞組的期望轉矩,三相繞組期望轉矩通過i(T,θ)查表模塊后輸出期望電流,期望電流與利用BP神經網絡建模的SRM模塊輸出的反饋電流做差,送入滯環控制模塊,實現電流閉環控制。該雙環控制電路的輸出,作為功率開關電源模塊“converter”的控制信號,決定了該開關電源哪一相導通、哪一相截止,進而決定了施加到包含BP神經網絡的SRM模塊上的三相電壓激勵源,保證了圖6所示的結合了Simulink控制電路的SRM有限元計算的實時動態性。
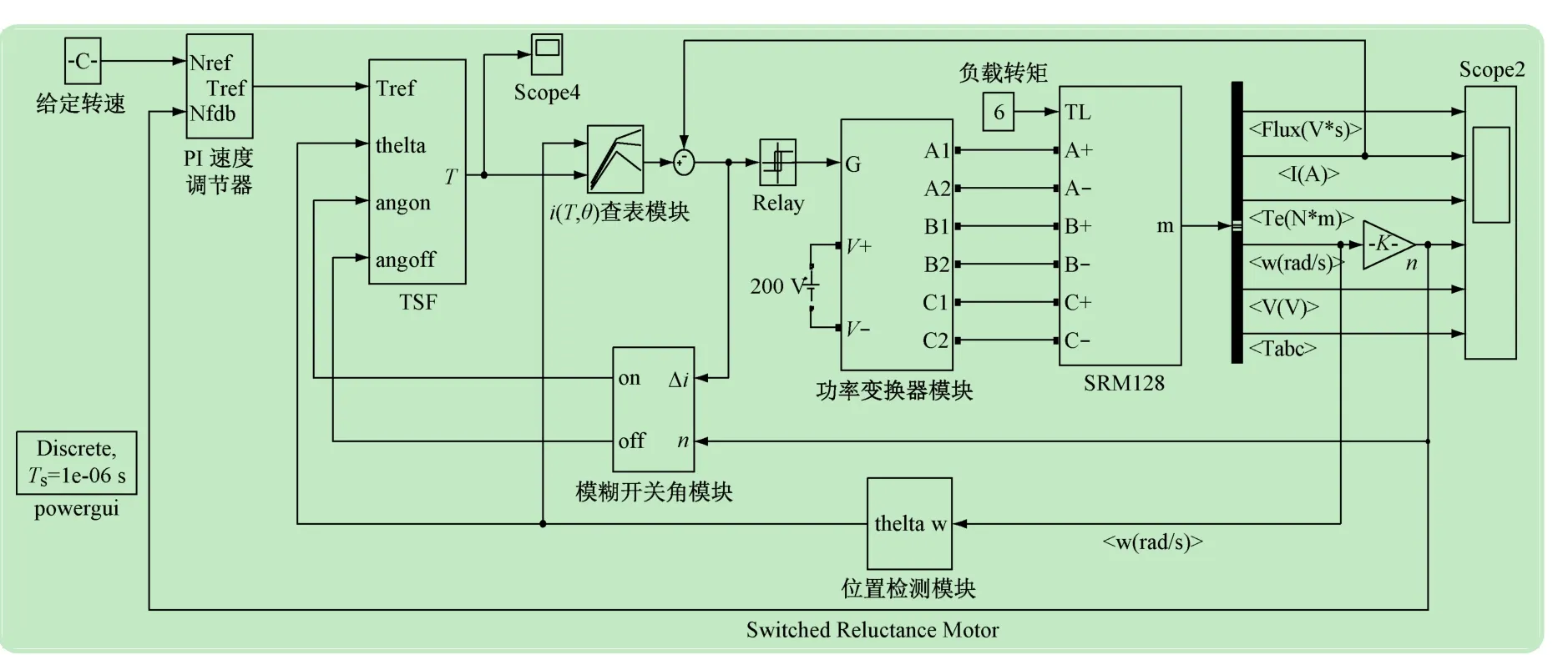
圖6 SRM雙閉環控制系統的仿真模型
3 車載SRM的仿真結果及驗證
針對圖6搭建的SRM雙閉環控制系統仿真模型,將其中的電流滯環寬度2Δh設為0.6 A,給定轉速nref=650 r/min,起始負載轉矩TL=6 N·m,在0.2 s突加負載至TL=10 N·m,對上述工況進行仿真,仿真結果首先用Simulink平臺采集,如圖7所示。
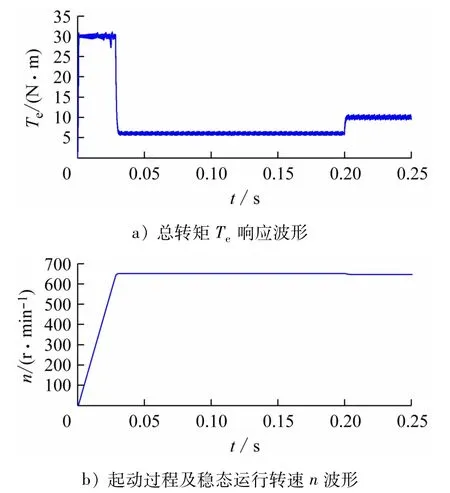
圖7 車載SRM的Simulink仿真結果
由圖7可見,SRM起動后能迅速達到給定轉速650 r/m,且轉速波形較為平穩,說明系統響應快且運行穩定,同時受到模糊開關角與轉矩分配函數控制,使得轉矩的脈動得到明顯約束,三相疊加轉矩的總和基本上保持恒定值,達到了減小轉矩脈動效果。在0.2 s突加負載擾動時,轉速略下降1.8 r/min,仍然保持穩定,可見系統魯棒性較好。證明圖6中Simulink控制電路輸出的動態電壓激勵信號是合理的,且該動態電壓激勵源能夠及時施加到MagNet有限元求解域里,進而獲得合理的車載SRM動態有限元計算結果,可見由這兩種軟件聯合構建的仿真模型是正確的。
對于車載驅動電機,最關鍵的性能是轉速與轉矩間的輸出特性。以往,電機轉速與轉矩的輸出特性很難用Matlab軟件單獨來實現仿真,而Infolytica軟件提供了這樣的計算功能,只要在Infolytica軟件里實現的有限元計算是耦合了電機運動過程的瞬態場計算,則該軟件能夠很方便地將各轉速階段的電磁轉矩結果記錄下來,并以圖表的形式展示。在圖6中,用Simulink搭建的雙閉環控制電路,體現了運用BP神經網絡、模糊控制與轉矩分配函數法等復雜控制算法調節SRM從起動到各個行駛轉速運行的過程,該Simulink控制電路為Magnet軟件里的SRM有限元計算提供了瞬態場激勵源,只要調節轉速給定,相應的該車載SRM仿真系統可以輸出與給定轉速基本一致的實際轉速,該調節過程的轉速與轉矩輸出特性的整個計算結果由Infolytica軟件提供,如圖8所示。
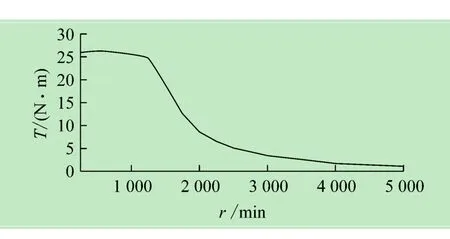
圖8 轉速與轉矩輸出特性的仿真結果
由圖8可見,SRM起動階段,轉矩基本上保持在最大值并恒定,即SRM工作在恒轉矩區,保證車載電機能夠以最大加速度快速起動電動汽車,當轉速大于額定值1 500 r/min,SRM處于高速運行階段,轉矩隨著轉速的增加呈現下降趨勢,即工作在恒功率區,保證車載電機在輸出額定牽引功率的同時定子電流不過載,工作在合理的功率密度下,顯然這樣的輸出特性十分符合電動汽車所要求的驅動性能。
為了驗證上述仿真方法的正確性,本文利用圖9所示的實驗系統對表1中所列的SRM進行了轉速與轉矩之間關系的負載實驗。該實驗系統主要包括被測的三相12/8極SRM、控制器、聯軸器、磁粉制動器、WLK程控電源、信號采集等,利用磁粉制動器產生負載扭矩,通過聯軸器施加到SRM上,利用WLK程控電源調節磁粉制動器的激磁電流,調節其產生的負載扭矩,該WLK程控電源具有RS-232(或定制RS-485)串行接口,可與信號采集分析儀通信,將所施加的負載數據通過信號采集分析儀檢測出來,利用仿真器將圖6所示的SRM雙閉環控制仿真系統源程序代碼調試通過后下載到控制器(在圖9中,控制器與SRM連接在一起,圖中沒有單獨顯示控制器)里,利用數據采集分析儀還需要記錄SRM的輸入電壓、輸出電壓、輸出電流、轉速等。由于SRM輸出的是脈動性很強的磁阻轉矩,對用扭矩傳感器測量轉矩的結果造成很大的干擾,誤差很大,為此,本文采用等效計算法加以解決。實驗時采用的SRM電源電壓為額定電壓200 V,設定磁粉制動器的激磁電流為0.1 A,將給定轉速逐漸增加,采集該SRM電機定子相電流、相電壓、轉速、負載扭矩等實驗數據,利用式(1)計算出該電機的磁鏈,再通過該SRM的磁化曲線查到與當前時刻的磁鏈和定子電流相對應的磁共能,根據

式中:Te為SRM輸出轉矩的瞬時值;W′為磁共能;θ為轉子位移角;i為定子相電流。
在線性假設下,可以推導出計算SRM輸出轉矩平均值

式中:Ns為定子極數;Nr為轉子極數。再利用式(5)計算結果作為該SRM的輸出轉矩平均值的實測值。
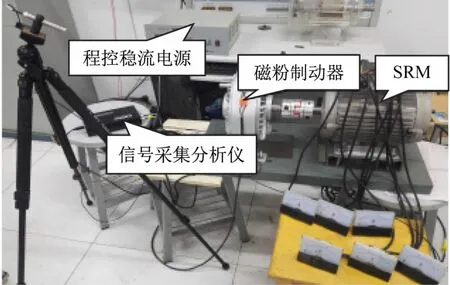
圖9 SRM系統實驗平臺
本文選取了3個給定轉速的輸出轉矩平均值的仿真與實驗結果,列于表2中。由表2可見,實驗結果與仿真結果基本吻合。
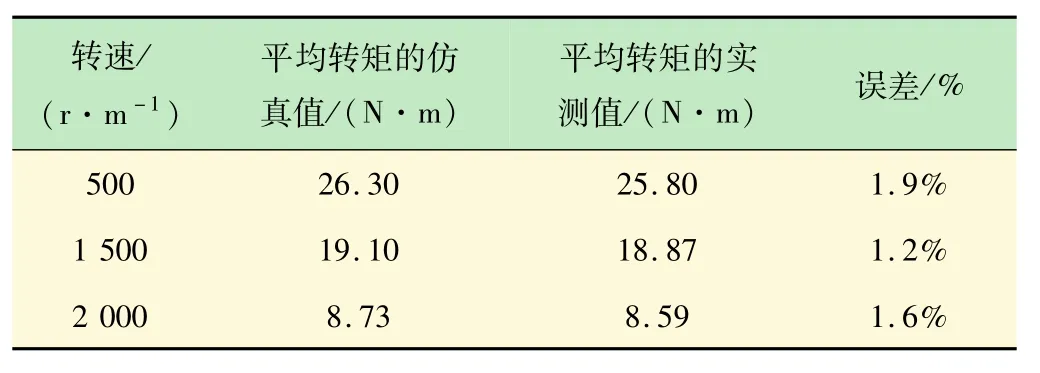
表2 仿真結果與實驗結果的比較
從Simulink與Magnet輸出的結果都說明,聯合這兩種軟件用于車載SRM的仿真可以實現對該電動機運行期間有限元瞬態場的實時計算,模擬出車載電動機行駛過程中的輸出特性,這對于學習、理解、研究電動汽車驅動系統十分重要。
4 結 語
SRM的合理仿真問題歷來是業界的研究熱點,而車載SRM及其驅動系統的仿真實驗問題則是業界的研究難點。本文從仿真實驗方法的通用性與合理性出發,結合了通用性強的兩種軟件,Infolytica與Matlab,利用Infolytica軟件包中MagNat提供的瞬態場有限元計算功能解決SRM建模的強非線性問題,利用Matlab軟件中Simulink平臺搭建的控制電路解決瞬態場計算需要的動態激勵源,同時將控制車載SRM運行的復雜控制算法用Simulink控制電路實現,只要給電氣工程及其自動化專業的本科生簡要講解有限元數值計算知識及詳細講解SRM的結構與工作原理,這些學生可以很方便利用該仿真實驗方法中的Magnet來設計車載SRM結構、利用該仿真實驗方法中的Simulink來設計控制算法,保證了該仿真實驗方法的通用性,不必再依賴硬件實驗設備來搭建車載SRM驅動控制系統,節省了實驗教學成本與實驗室空間資源。本文結合了一臺具體的車載SRM,闡述了該仿真方法的理論依據與實現過程,仿真結果證明該方法不僅合理、可靠,而且具備實時動態性。因此,無論是從通用性還是從實時性來評價,本文提供的仿真方法十分符合車載SRM驅動系統的要求,可以作為電動汽車用驅動系統研究的理論分析的工具。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24