雙電機獨立驅(qū)動電動三輪車輛軟硬件設(shè)計
2020-05-11 06:18:17王佳奇張成濤尚玉璽彭炳順
廣西科技大學學報 2020年2期
王佳奇 張成濤 尚玉璽 彭炳順
摘要:為實現(xiàn)電動三輪車的雙電機獨立驅(qū)動差速控制,設(shè)計了由軟件和硬件組成的差速控制系統(tǒng),首先,介紹控制系統(tǒng)的結(jié)構(gòu)和差速控制邏輯;然后,根據(jù)系統(tǒng)的控制要求設(shè)計控制器硬件,包括硬件框圖和各個模塊的說明;在硬件設(shè)計的基礎(chǔ)上,采用基于附著系數(shù)相等的差速控制策略,并通過軟件代碼編寫進行實現(xiàn),使用流程圖等進行表述;最后,通過搭建出的試驗平臺,驗證所設(shè)計的控制器能否達到預期的控制要求,實車試驗后的結(jié)果表明:應(yīng)用該試驗平臺能夠起到按照既定的差速控制策略實現(xiàn)電子差速的功能,該試驗平臺是可靠、有效的,
關(guān)鍵詞:電動三輪車;電子差速;輪轂電機;軟硬件設(shè)計
中圖分類號:U469.72DOI:10.16375/j.cnki,cn45-1395/t,2020.02.014
0引言
隨著客貨運需求的日益增多,電動三輪車作為一種價格低廉、經(jīng)營成本較低、靈活方便的運輸工具應(yīng)運而生,并與日俱增,電動三輪車根據(jù)其使用用途的區(qū)分采用不同的驅(qū)動形式:一部分采用單側(cè)輪轂電機驅(qū)動的形式,另一部分使用無刷電機搭配差速后橋,或使用集成為一體的有齒差速雙驅(qū)電機;前者僅適用于載重量小的場景,后者應(yīng)用機械差速,動力性、可操縱性和安全性更好,但也造成驅(qū)動系統(tǒng)結(jié)構(gòu)復雜,且不能發(fā)揮電力驅(qū)動的優(yōu)勢,同時各車輪驅(qū)動力難以實現(xiàn)獨立控制。
相對于普通機械差速器,電子差速器有著明顯的優(yōu)越性,目前各學者對于此類問題多集中在控制算法的研究上:葛英輝等提出基于Ackermann轉(zhuǎn)向模型和神經(jīng)網(wǎng)絡(luò)方法的復合模型;趙艷娥等基于滑模變結(jié)構(gòu)控制理論對電子差速控制系統(tǒng)進行了探討;王鵬等基于轉(zhuǎn)速和滑移率聯(lián)合控制建立了模型并仿真,在硬件設(shè)計上:方道等使用ADC0809、AT89S52和DAC0832等硬件組合設(shè)計了電子差速器;韓曉峰對可編程邏輯控制器(PLC)、輪轂電機、轉(zhuǎn)向電機和轉(zhuǎn)速傳感器等的選型進行了說明。
本文的目的在于設(shè)計較為完善的電子差速控制系統(tǒng)的控制器硬件和軟件編程方法,可以作為驗證各控制算法的試驗平臺,在實車試驗中,搭配基于附著系數(shù)相等的差速控制策略,在一輛單側(cè)輪轂電機驅(qū)動的三輪車上進行改裝,方法為:將另一側(cè)的從動輪更換為同規(guī)格的輪轂電機且搭配同型號控制器,并加裝本文設(shè)計的電子差速控制器,其寫入的軟件代碼可以是能夠?qū)崿F(xiàn)電子差速控制的程序,也可以是不實現(xiàn)電子差速控制而使左右兩側(cè)輪轂電機電壓始終一致的程序,在實車試驗中,將前輪轉(zhuǎn)角分別固定為左轉(zhuǎn)10°、20°和30°,分別應(yīng)用閉環(huán)控制將車速設(shè)定為5km/h、10km/h和15km/h,比較應(yīng)用電子差速控制和不應(yīng)用電子差速控制的試驗數(shù)據(jù)。
1差速控制系統(tǒng)結(jié)構(gòu)
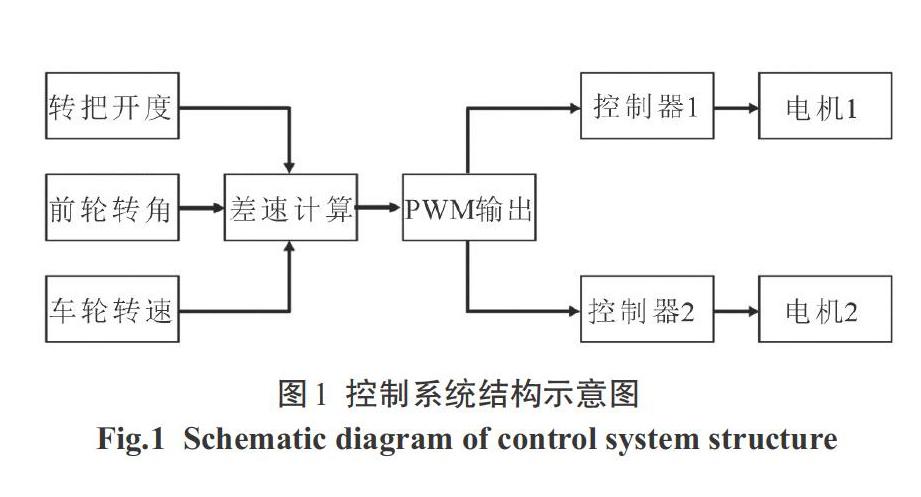
電動車輛的差速控制,其核心是電動車電機的控制,本文所構(gòu)建的電子差速控制結(jié)構(gòu)主要包含差速計算功能和兩個電機及其控制器,完整的差速控制系統(tǒng)如圖1所示。
將期望的功率開度和轉(zhuǎn)向把轉(zhuǎn)角作為電子差速控制器的輸入,控制器接收到這兩者的信號值,結(jié)合左右電機的輪速信息,調(diào)整左右電機各自的電壓以實現(xiàn)附著系數(shù)的相等。
差速計算過程為:根據(jù)3個輸入量計算得到兩電機應(yīng)該施加的工作電壓,以PWM信號的形式輸出給各自的電機控制器,控制兩電機實現(xiàn)差速控制的目的,其中,轉(zhuǎn)把開度決定兩電機的工作電壓總和,轉(zhuǎn)向角度和車速共同決定了兩電機的電壓分配比例,應(yīng)用開環(huán)控制的響應(yīng)速度快,貼合傳統(tǒng)駕駛習慣。
2差速控制邏輯
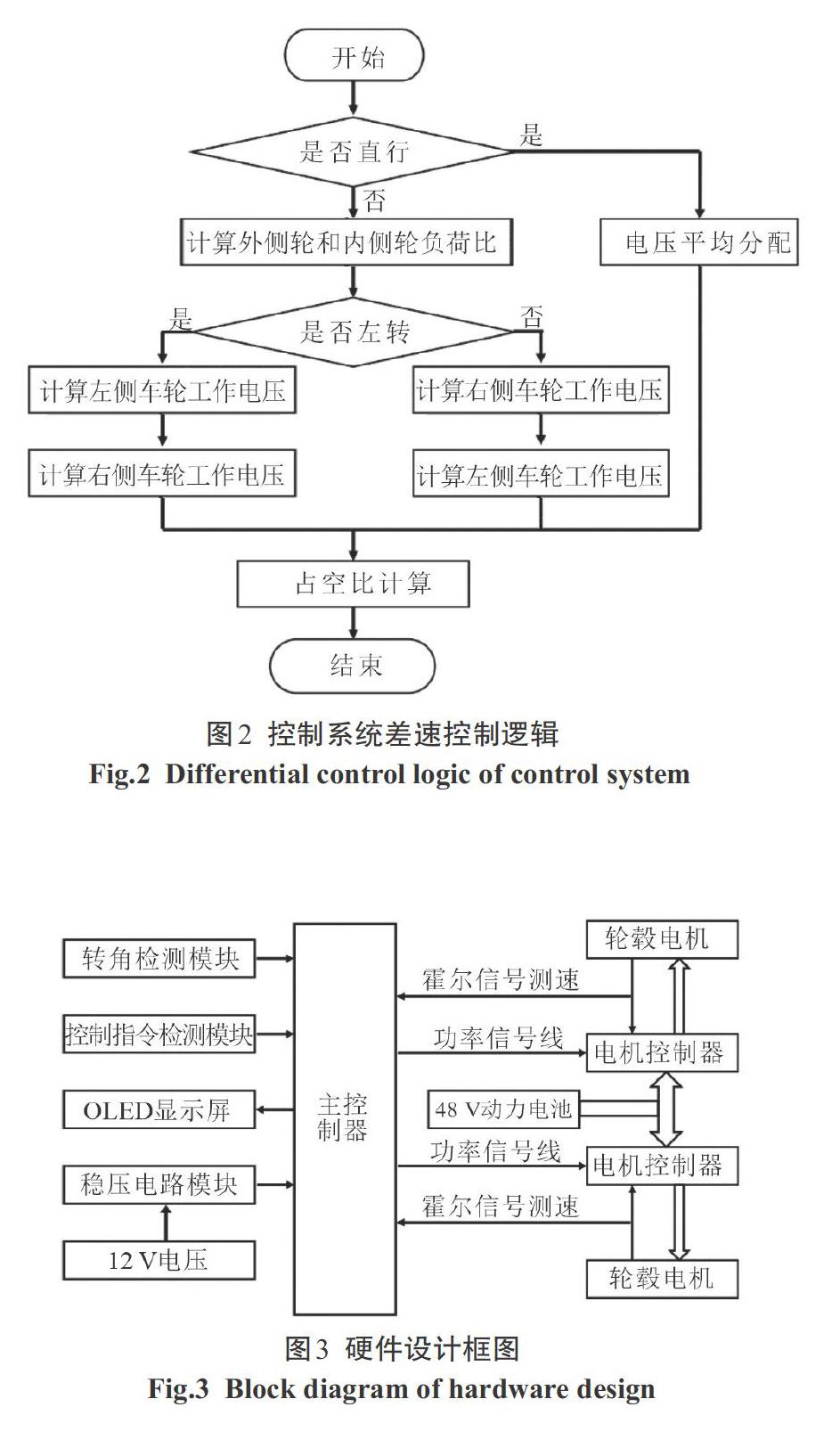
當差速控制系統(tǒng)接收到功率開度和轉(zhuǎn)向把轉(zhuǎn)角的信號后,首先判斷車輛是否直行,若直行則使兩輪轂電機電壓相同,具體電壓值的大小由接收到的功率開度值決定;若為轉(zhuǎn)向行駛,計算得到外側(cè)車輪與內(nèi)側(cè)車輪的負荷比,再根據(jù)功率開度、轉(zhuǎn)向把轉(zhuǎn)角和左右電機的轉(zhuǎn)速三者數(shù)據(jù),共同計算得到轉(zhuǎn)向內(nèi)側(cè)電機的工作電壓與工作總電壓的比值,根據(jù)轉(zhuǎn)向方向的不同,先計算內(nèi)側(cè)電機的工作電壓,再計算外側(cè),將兩路計算結(jié)果以占空比的形式輸出,差速控制邏輯如圖2所示,
3差速控制系統(tǒng)硬件設(shè)計
3.1系統(tǒng)硬件設(shè)計框圖
轉(zhuǎn)角檢測模塊采集前輪轉(zhuǎn)角角度,控制指令檢測模塊獲取加速轉(zhuǎn)把的旋轉(zhuǎn)開度,信號由MCU接收,MCU結(jié)合左右輪的線速度,將信號處理后輸出給左右輪轂電機的電機控制器以分配左右輪轂電機的工作電壓,主控制器由5v穩(wěn)定電源供電,48v動力電源經(jīng)電機控制器驅(qū)動輪轂電機,并在OLED顯示屏上顯示相關(guān)信息,硬件設(shè)計方案如圖3所示。
為實現(xiàn)以上功能,MCU選擇宏晶公司生產(chǎn)的IAPl5W4K58$4.其具有內(nèi)置可調(diào)晶振,8個A/D模擬數(shù)字轉(zhuǎn)換通道,6個高精度PWM脈沖寬度調(diào)制通道,2路CCP輸入捕捉通道等,線性霍爾元件選擇AH3503型號,輸入量是磁感應(yīng)強度,輸出是和輸入量成正比的電壓,輪轂電機內(nèi)使用41F雙極鎖存霍爾元件,接近s極和N極時分別輸出不同的信號值,輪轂電機選用無刷直流電機,與電機控制器配套使用,通過改變輸出給電機控制器的占空比來調(diào)整電機的工作電壓。
3.2轉(zhuǎn)角檢測模塊
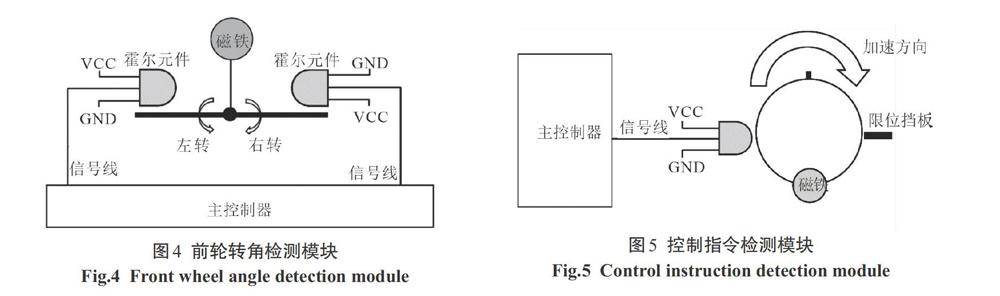
將釹鐵硼強磁鐵固定在轉(zhuǎn)向軸的前伸位置處,兩個線性霍爾元件放置其斜后兩側(cè),兩路信號均由MCU進行A/D轉(zhuǎn)換,前輪轉(zhuǎn)向角變化時,線性霍爾元件感應(yīng)到的磁感應(yīng)強度發(fā)生改變,兩路信號值也隨之變化,分析兩路信號的強弱和差值,即可判斷轉(zhuǎn)向角的方向和大小,如圖4所示。
3.3控制指令檢測模塊
該模塊的原理與轉(zhuǎn)角檢測模塊類似,區(qū)別為只應(yīng)用一個線性霍爾元件,另增加了限位裝置,通過MCU讀取霍爾元件輸出的信號,轉(zhuǎn)換為轉(zhuǎn)把的轉(zhuǎn)動幅度,對應(yīng)到實物為常見的右手調(diào)速轉(zhuǎn)把,如圖5所示。
3.4測速模塊
輪轂電機運行時,電機控制器根據(jù)霍爾信號線的信號值對動力相線的電流方向進行控制,任意一根霍爾信號線的信號值都會隨著輪轂電機的轉(zhuǎn)動產(chǎn)生規(guī)律的變化,MCU采集該信號的變化規(guī)律,即可計算得到車輪的角速度,如圖6所示。
3.5OLED顯示屏模塊
人機交互界面使用IIC接口的0.96英寸OLED顯示屏,僅需使用兩個普通10口,可顯示轉(zhuǎn)把電壓轉(zhuǎn)向角度、各輪轉(zhuǎn)速、電壓分配情況等信息,直觀地觀察到差速控制效果。
4差速控制系統(tǒng)軟件設(shè)計
軟件開發(fā)總體方案:基于Keil軟件開發(fā)工具對系統(tǒng)進行編程,系統(tǒng)初始化包括:定時器初始化,顯示屏初始化,ADC、PWM及CCP初始化,按功能可劃分為定時器中斷、顯示屏內(nèi)容顯示、A/D采樣模塊、PWM波輸出、CCP測速程序等幾大部分,程序流程圖如圖7所示。
代碼編寫時應(yīng)能實現(xiàn)以下具體功能:
1)每間隔20ms,都要采集一次控制指令檢測模塊和轉(zhuǎn)角檢測模塊的輸出模擬量,以便及時對行駛意圖做出響應(yīng)。
2)采集到車速、前輪轉(zhuǎn)角等數(shù)據(jù)后,程序需要實現(xiàn)依此計算出離心力以及左右后輪負荷比,然后分配左右輪轂電機工作電壓的功能。
3)車輪轉(zhuǎn)速的計算分析在輸入捕捉中斷中進行,若超過規(guī)定時間沒有接收到輸入捕捉中斷,說明此時車輪己停止轉(zhuǎn)動,需將車輪轉(zhuǎn)速賦值為0。
5試驗過程
在正常行駛中,駕駛員希望車輪受到的側(cè)向力較小,尤其是作為轉(zhuǎn)向輪的前輪,側(cè)向力越大,附著系數(shù)越小,行駛就越不安全,前輪承擔著按照駕駛員意愿改變行駛方向的重要作用,前輪所受側(cè)向力越小,則越接近中性轉(zhuǎn)向,反之會產(chǎn)生過多轉(zhuǎn)向或不足轉(zhuǎn)向。
為驗證此方案,在水平且路況良好的瀝青路面行駛?cè)嗆嚕棺鳛檗D(zhuǎn)向的前輪固定為左轉(zhuǎn)向10。,在程序上作出修改,應(yīng)用PID閉環(huán)控制使車速分別處于5km/h、10km/h、15km/h,并分別測量應(yīng)用差速控制方案前后的內(nèi)側(cè)后輪轉(zhuǎn)彎半徑,然后再將轉(zhuǎn)向前輪分別設(shè)定在左轉(zhuǎn)20°、30°,再次將車速分別控制在5km/h、10km/h、15km/h,測量未應(yīng)用差速控制方案時和應(yīng)用差速控制方案時的內(nèi)側(cè)后輪轉(zhuǎn)彎半徑,其中未應(yīng)用電子差速控制方案時左右兩側(cè)輪轂電機的工作電壓始終相等且隨著加速轉(zhuǎn)把的開度值等比例增加,由于存在測量誤差,所以每個角度測試前要進行推行試驗測出轉(zhuǎn)彎半徑作為理想轉(zhuǎn)彎半徑,如表1所示,將試驗結(jié)果的數(shù)據(jù)進行擬合,如圖8所示。
試驗數(shù)據(jù)表示,前輪轉(zhuǎn)向角分別為左轉(zhuǎn)10°、20°、30°時的推行半徑依次減小;在任意轉(zhuǎn)向角度時,未應(yīng)用電子差速控制時的轉(zhuǎn)彎半徑均大于相同轉(zhuǎn)向角度的推行半徑,且行駛速度越快,同等條件下的轉(zhuǎn)彎半徑增加值越大;而當應(yīng)用了電子差速控制后的轉(zhuǎn)彎半徑與同條件下未應(yīng)用電子差速控制相比較,轉(zhuǎn)彎半徑明顯減小且接近推行半徑,偶爾會略微低于推行半徑,說明應(yīng)用電子差速控制與未應(yīng)用電子差速控制相比,能夠有效地改善不足轉(zhuǎn)向的狀況。
這是由于在轉(zhuǎn)向行駛時,若左右側(cè)輪轂電機工作電壓相同,由于內(nèi)側(cè)輪速小于外側(cè)輪速,通過對電機模型的分析可知;內(nèi)側(cè)輪轂電機驅(qū)動力大于外側(cè),在不超過地面附著力的前提下,前輪會受到與轉(zhuǎn)向方向相反的側(cè)向力,從而導致不足轉(zhuǎn)向。
若應(yīng)用電子差速控制實現(xiàn)轉(zhuǎn)向運動時內(nèi)側(cè)與外側(cè)輪轂電機工作電壓的合理分配,前輪受到的側(cè)向力會減小甚至為0.所以轉(zhuǎn)向更接近中性轉(zhuǎn)向,更有利于行駛的穩(wěn)定;同時,在車輛轉(zhuǎn)向起步時,應(yīng)用電子差速控制時更加輕易且車身的抖動不那么劇烈。
6結(jié)論
針對雙電機獨立驅(qū)動車輛控制器的軟硬件進行了設(shè)計,并應(yīng)用所搭建的試驗平臺進行實車驗證,所需的功能均由芯片內(nèi)部硬件資源提供支持,大大簡化了外圍電路,且價格低廉,該試驗平臺結(jié)合已有的控制算法,可以實現(xiàn)預期的雙電機獨立控制實現(xiàn)差速功能的目標,若要進一步提升控制效果,可選用更高級架構(gòu)和更快運行速率的Mcu,并在各項信號的檢測精度和平穩(wěn)性上做進一步研究。
