160T液壓動力平板車電氣控制系統
2020-05-11 12:24:30王大江張宇王金祥馮扶民
數字技術與應用 2020年2期
關鍵詞:控制
王大江 張宇 王金祥 馮扶民

摘要:液壓動力運輸平板車用于完成重型特種裝置在指定道路條件的道路運輸。運輸平板車可以與特種裝置完成對接,并實現舉升和連接固定等功能,其電氣控制系統主要為實現平板車的各種轉向、升降、移動等動作。該系統采用了CAN總線模塊化分布式控制技術、人機交互技術及故障診斷等技術。
關鍵詞:液壓動力運輸車;控制;總線;人機交互
中圖分類號:TP271 文獻標識碼:A 文章編號:1007-9416(2020)02-0131-02
0 概述
液壓動力運輸平板車用于完成重型特種裝置在指定道路條件的道路運輸。運輸平板車可以與特種裝置完成對接,并實現舉升和連接固定等功能,具體過程為:運輸平板車下降至規定高度,縱向進入特種裝置下方,達到起升高度后,與特種裝置連接固定并托起特種裝置。滿足特種裝置的道路運輸、轉載流程中的臨時停放,下放到指定場坪等要求。
運輸平板車主要由動力系統、行駛系統、液壓系統、轉向機構、制動系統、懸掛機構、車架、電氣系統等組成。本文主要研究電氣控制系統[1]。
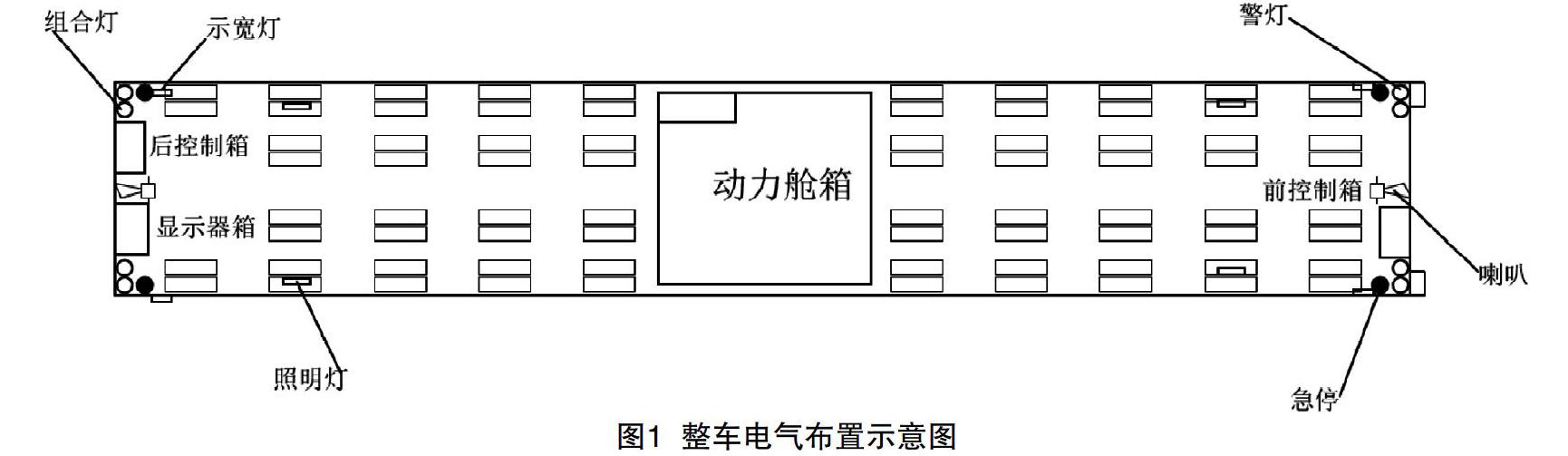
1 電控系統總體布置
整車電氣布置圖圖1所示。
根據車輛的機械結構特點,電氣系統采用分布式控制,采用國際上最先進的控制理念,基于移動車輛的CAN總線控制技術,抗干擾能力最佳。
總線網絡控制原理圖,如圖2所示。該圖中包括所有的總線設備,主要展示各種總線設備在總線系統中的連接情況。共分為三層總線網絡,第一層可以稱之為主網絡,用使用控制器的CAN2端口,包括動力艙箱、前電控箱、后電控箱以及顯示器箱;第二層為次網絡,使用CAN3端口,用于接收8個轉向角度編碼器和2個升降高度編碼器信號的次網絡;第三層使用CAN4端口連接遙控器[2]。
2 人機交互及轉向控制
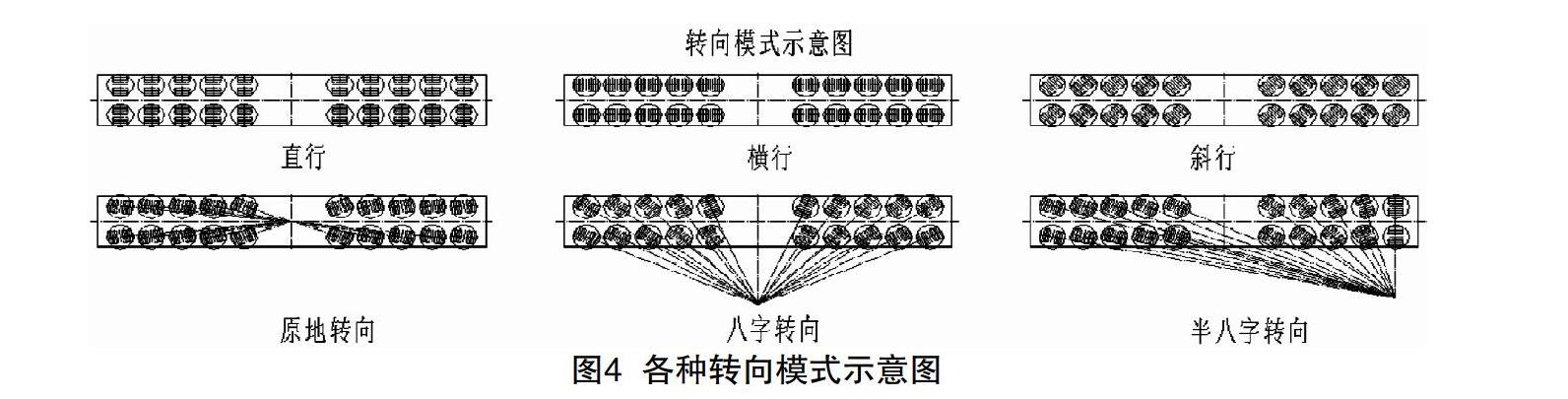
根據客戶要求和現場實踐經驗,設計了多種基于數學模型的轉向模式,如正常狀態下包括直行、斜行、前半八字、后半八字、橫行等,另外還實現了原地中心轉向模式。電氣系統對液壓系統同時采用分布式控制。每一個液壓懸掛及馬達均由相應的控制器輸入輸出點進行對應。人機交互系統實時顯示車輛的液壓壓力、堵塞報警、車速、液壓油溫度、流量;發動機通過J1939總線實時監測到其轉速、水溫、油壓、小時計、扭矩等參數;車輛的總線狀態、編碼器的總線狀態;各種報警信息等均實時提供給操作者,并進行遠端傳輸,方便后臺進行車輛的實時監控及故障維修[3]。人機交互數據如圖3所示。各種轉向模式如圖4所示。
3 動力艙箱控制分布
該部分使用一個力士樂RC28-14控制器。主要是對發動機啟停、泵和動力艙內各元件的控制、各電控箱和照明燈的供電等[4]。該控制器實時與滿足總線J1939協議的柴油發動機進行通信,進而控制,實時監測其各種參數,同時控制動力艙部分的液壓系統,如泵的控制,其壓力的檢測等。
4 前/后電控箱控制分布
該部分各使用一個力士樂RC28-14控制器,主要控制前/后半部分的轉向閥、驅動馬達和各指示燈等。
5 遙控器選型
采用意大利AUTEC遙控器,更好的滿足設備所需的防護等級、溫度范圍、電磁干擾等參數,根據設備的使用要求及功能要求,設計的遙控器操作界面示意圖如圖5所示。
6 結語
本文詳細介紹了160T液壓動力平板運輸車電氣控制系統的組成, 主要實現的功能及控制分布,分別介紹了各個組成部分的詳細控制點分布、人機交互的實現、轉向模式的實現及CAN總線的布局,對各個PLC控制器的選型做了詳細說明,對遙控的選型和面板的布局做了詳細說明,對后續動力平板車電氣控制系統的設計起到了積極的指導意義。
參考文獻
[1] 王大江,張宇,王智勇.運板車驅動行走系統的優化[J].工程機械,2010(11):20-22.
[2] 王大江,張宇,王眾.運板車整車升降控制算法的研究與實現[J].工程機械,2011(1):26-29.
[3] 李聰,馬超,戴志兵.大型運梁車過隧道自動駕駛與控制技術設計研究[J].交通世界,2014(26):126-127.
[4] 王望予.汽車設計(第四版)[M].北京:機械工業出版社,2004.
Electric Control System of? 160t Hydraulic Power Platform Transporter
WANG Da-jiang1,ZHANG Yu1,WANG Jin-xiang2,FENG Fu-min2
(1.Qinhuangdao Tianye Tolian Heavy Industry & Technology Co., Ltd., Qinhuangdao? Hebei? 066000;
2.Hebei Heavy Equipment Engineering Technology Center, Qinhuangdao? Hebei? 066000)
Abstract:The hydraulic power transporter is used to complete the road transport of heavy special equipment under the specified road conditions. The transporter completes docking with special devices, and realizes functions such as lifting, connection and fixation, its electrical control system is mainly to realize various steering, lifting, moving and other actions. The system adopts can bus modular distributed control technology, human-computer interaction technology and fault diagnosis technology.
Key words:the hydraulic power transporter; control; bus; human-computer interaction
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 17:15:21
商業會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17
