新型重點區(qū)域無人機防控系統(tǒng)*
2020-05-08 05:54:38張進薛德鑫王奉甲
現(xiàn)代防御技術 2020年1期
張進,薛德鑫,王奉甲
(1.江蘇自動化研究所,江蘇 連云港 222061;2.中國艦船研究院,北京 100101)
0 引言
近年來,重點區(qū)域(例如機場、政府場所、重要港口等)頻繁出現(xiàn)無人機騷擾襲擊事件。2015年1月,美國華盛頓白宮證實,執(zhí)法部門當天發(fā)現(xiàn)一架小型無人機闖入白宮;2016年5月,成都雙流機場遭無人機逼停55架航班,對機場造成了重大經(jīng)濟損失。隨著低空空域的逐步開放以及商業(yè)無人機的日受青睞,重點區(qū)域遭受此類“低小慢”目標的威脅將會越來越大[1-2]。因此,構建重點區(qū)域無人機防控系統(tǒng)顯得尤為必要[3-5]。
目前,現(xiàn)有的無人機防控系統(tǒng)基本分為固定式防控系統(tǒng)[6]以及移動式防控系統(tǒng)[7-8]。固定式防控系統(tǒng)對設備的體積、重量約束比較小,因此系統(tǒng)的功能性能指標一般較高,但是缺乏機動性,只能固定防御某一范圍內(nèi)的“低小慢”目標。而移動式防控系統(tǒng)雖然機動性強,但是由于載體空間有限,需要考慮設備的便攜性、安裝簡易性以及高度集成性,因此系統(tǒng)的功能性能指標一般要低于固定式防控系統(tǒng)。上述2個無人機防控系統(tǒng)的優(yōu)劣勢正好互補,針對此現(xiàn)象,本文構建了一種新型無人機防控系統(tǒng),將上述2個子系統(tǒng)進行高度有機集成,以此大幅度提升系統(tǒng)的功能和性能,此新型無人機防控系統(tǒng)的構建在國內(nèi)尚屬首例。
1 新型無人機防控系統(tǒng)
目前,主流的無人機防控系統(tǒng)一般由探測識別分系統(tǒng)、指揮控制分系統(tǒng)以及打擊火力分系統(tǒng)組成[9-10]。新型無人機防控系統(tǒng)通過將固定式防控系統(tǒng)和移動式防控系統(tǒng)有機融合在一起,其基本組成包含2套探測識別分系統(tǒng)、2套指揮控制分系統(tǒng)以及兩套打擊火力分系統(tǒng)。
1.1 系統(tǒng)的組成與配置
1.1.1 系統(tǒng)的組成概況
新型重點區(qū)域防控系統(tǒng)中的探測識別分系統(tǒng)主要由低空空域監(jiān)視雷達、低空小目標探測雷達(移動車載系統(tǒng))、光電識別跟蹤設備、光電識別設備(移動車載系統(tǒng))組成。其中,兩型雷達設備是專為探測“低小慢”目標研制而成,兩型光電設備主要用于對已經(jīng)捕捉的目標進行識別確認,判斷是否為敵對“低小慢”目標,以免造成誤傷。
新型重點區(qū)域防控系統(tǒng)中的指揮控制分系統(tǒng)主要由綜合控制設備和車載指揮控制設備組成。兩型指揮控制設備主要用于接收雷達設備的目標信息,實時解算目標的運動要素,并指揮調度光電對已捕捉的目標進行識別確認,最后控制干擾打擊設備對敵對“低小慢”目標進行防控。
新型重點區(qū)域防控系統(tǒng)中的干擾或對抗分系統(tǒng)主要由導航通信干擾設備、定向干擾設備(移動車載系統(tǒng))組成。常見的反無人機技術包括硬毀傷技術、干擾技術以及偽裝欺騙技術[11]。其中,干擾技術由于其技術成熟且反制效率高,在反無人機領域被普遍使用。因此,新型無人機防控系統(tǒng)同樣采用的是干擾技術。
新型重點區(qū)域防控系統(tǒng)的具體設備組成,可以參考表1。

表1 系統(tǒng)組成與配置
1.1.2 系統(tǒng)各設備簡介
(1) 低空空域監(jiān)視雷達
低空空域監(jiān)視雷達為X波段采用分布式固態(tài)收發(fā)的近程多功能三坐標雷達,主要由有源天線、信息處理機箱、便攜式終端等組成。有源天線主要完成雷達激勵信號分布式發(fā)射和微弱回波信號的分布式接收、多通道高速數(shù)據(jù)同步傳輸、通道幅相精確修正、多波束數(shù)字波束形成(digital beamforming,DBF)合成等處理;信息處理機箱完成多通道信號處理和數(shù)據(jù)處理;便攜式終端主要用于完成雷達視頻顯示、整機操控、狀態(tài)顯示及故障檢測。
低空空域監(jiān)視雷達對于微型無人機(RCS=0.01 m2)最遠探測距離能達到10 km,對于大型無人機(RCS=0.1 m2)最遠探測距離能達到18 km,其中,RCS(radar-cross section)表示雷達散射截面積。具體設備如圖1所示。

圖1 低空空域監(jiān)視雷達
(2) 低空小目標探測雷達
低空小目標探測雷達采用Ku波段,由雷達收發(fā)陣面、伺服轉臺、處理與顯示機柜、總電源線纜、單模光纖線纜、架設工裝組成。
低空小目標探測雷達對于微型無人機(RCS=0.01 m2)最遠探測距離能達到5 km,對于大型無人機(RCS=0.1 m2)最遠探測距離能達到8 km。具體設備如圖2所示。

圖2 低空小目標探測雷達(車載系統(tǒng))
(3) 光電識別跟蹤設備
光電識別跟蹤設備由室外光電指向器(前端設備)和室內(nèi)顯控機柜(終端設備)兩大部分組成,兩者之間用室外電纜或光纜進行連接,其中光電指向器采用地平式兩軸轉臺結構,由電視成像單元、紅外成像單元、激光器、伺服控制組件及支撐平臺等部分組成。
光電識別跟蹤設備在天氣良好狀況下,對于微型無人機最遠識別距離能達到5 km,對于較大型無人機最遠探測距離能達到10 km。具體設備如圖3所示。

圖3 光電識別跟蹤設備
(4) 光電識別設備(車載系統(tǒng))
光電識別設備采用高清可見光攝像機和紅外成像儀,借助伺服機構,根據(jù)目標指示信息手動或者自動捕獲并跟蹤無人機目標。光電識別設備在天氣良好狀況下,對于微型無人機最遠識別距離能達到2 km,對于較大型無人機最遠探測距離能達到5 km。具體設備如圖4所示。

圖4 光電跟蹤設備(車載系統(tǒng))
(5) 綜合指揮控制設備
綜合控制設備主要由配電箱(3U,U為服務器外部厚度尺寸的單位,1U表示4.45 cm)、KVM(1U)、光端機(2U)、GPU服務器(4U)、網(wǎng)絡交換機(2U)、重點區(qū)域防控軟件組成。能夠同時接收不小于32批目標信息,并同時生成4類對抗設備的運行參數(shù),并具有自動轉火設置功能。具體設備如圖5所示。

圖5 綜合指揮控制設備
(6) 車載指揮控制設備
車載控制設備主要由KVM(1U)、GPU服務器(4U)、網(wǎng)絡交換機(2U)、配電箱(3U)等組成,具有信息接收、信息處理、人機交互、信息發(fā)送、信息顯示等功能。具體設備如圖6所示。
(7) 導航通信干擾設備
導航通信干擾設備由多功能二維轉臺、光學探測設備、多頻段無人機干擾設備和計算機控制與圖像處理系統(tǒng)組成。干擾頻段433 MHz~5.8 GHz,對于小型無人機,干擾最遠距離可以達到6 km。具體設備如圖7所示。

圖7 導航通信干擾設備
(8) 定向干擾設備
定向干擾設備由二維轉臺、光學探測設備、多頻段無人機干擾設備組成。干擾頻段900 MHz~5.8 GHz,對于小型無人機,干擾最遠距離可以達到5 km。具體設備如圖8所示。

圖8 定向干擾設備(車載系統(tǒng))
1.2 系統(tǒng)的組織結構
新型重點區(qū)域無人機防控系統(tǒng)采用開放式體系結構,模塊化設計,并采用一體化設計技術,基于統(tǒng)一的網(wǎng)絡配置和信息交換機制,各設備之間可以進行信息共享,實現(xiàn)了信息集成一體化。其組織結構關系如圖9所示。
固定式防控系統(tǒng)和移動式防控系統(tǒng)都可以單獨完成對敵方“低小慢”目標的防控任務,兩者通過無線網(wǎng)絡技術進行信息傳輸,共同構建新型無人機防控系統(tǒng)。2個子系統(tǒng)之間可以實現(xiàn)探測目標信息共享、操控指令下發(fā)及防控效果反饋。系統(tǒng)的指揮控制設備,集目標識別、威脅判斷、目標分配、對抗設備控制功能于一體,實現(xiàn)了指揮控制一體化,充分發(fā)揮了體系效能。
1.3 系統(tǒng)的功能特點
1.3.1 系統(tǒng)主要功能
(1) 目標探測識別功能
能夠實現(xiàn)對“低小慢”目標的探測和跟蹤,并通過光電視頻信息實現(xiàn)對目標的識別確認。
(2) 綜合態(tài)勢生成功能
指揮控制設備可以實時顯示探測系統(tǒng)已經(jīng)捕捉目標的位置信息,并根據(jù)探測設備發(fā)送的目標航跡實時解算目標的運動參數(shù),生成實時的綜合態(tài)勢。
(3) 對抗設備綜合控制功能
綜合控制設備可以實時控制導航通信干擾設備,對敵方“低小慢”目標進行防控,也可以下發(fā)操控指令給車載指揮控制設備,實現(xiàn)對定向干擾設備的控制。
1.3.2 系統(tǒng)主要特點
新型無人機防控系統(tǒng)將固定式防控系統(tǒng)和移動式防控系統(tǒng)的優(yōu)劣勢進行互補,因此不僅有效提高了系統(tǒng)的靈活性和機動性,也大幅提升了系統(tǒng)的各項功能和性能。系統(tǒng)的主要特點如下:
(1) 系統(tǒng)中的雷達設備專門針對“低小慢”目標,可以實現(xiàn)多批“低小慢”目標的同時跟蹤,且系統(tǒng)中同時具有2部探測雷達,可以起到相互補充、相互驗證的作用。
(2) 系統(tǒng)中的指揮控制設備具有自動轉火功能,一次性分配多批目指后,可以實現(xiàn)對多批目標的自動干擾打擊,提高了作戰(zhàn)效能。
(3) 系統(tǒng)可以分別或同時采用固定式防控和移動式防控系統(tǒng),提高了任務執(zhí)行時的靈活性、機動性。
1.4 系統(tǒng)的操作運行
新型無人機防控系統(tǒng)開機運行后,由雷達設備進行目標的搜索和捕捉,捕捉到目標以后,指揮控制設備調度光電設備進行目標識別確認并實時生成對抗設備的運行參數(shù),確認為無人機后,指揮控制設備則控制對抗設備進行干擾打擊,整個系統(tǒng)運行流程如下圖10所示。
2 關鍵技術
2.1 4G無線網(wǎng)絡傳輸技術
無線網(wǎng)絡通訊的方式有多種,新型無人機防控系統(tǒng)采用的是4G無線網(wǎng)絡通訊技術[12],通過在固定式防控系統(tǒng)和移動式防控系統(tǒng)兩端各添加一個4G無線路由器,并共同連接華為云,在云服務器上進行信息交換,實現(xiàn)固定式防控系統(tǒng)和移動式防控系統(tǒng)的無線通訊功能。
為保障傳輸過程中的數(shù)據(jù)的安全性,采用虛擬專用網(wǎng)絡(virtual private network,VPN)技術,實現(xiàn)端對端的數(shù)據(jù)安全加密。4G回傳配合監(jiān)控系統(tǒng),可以實時將車載反制的實時畫面及語音傳輸給綜合指揮控制設備,綜合指揮控制設備可以實時觀察反制現(xiàn)場情況
2.2 多目標協(xié)同打擊技術
若新型無人機防控系統(tǒng)在部署時,采用固定式防控系統(tǒng)與移動式防控系統(tǒng)防御區(qū)域相互重合的方式(如圖11所示),則相當于新型無人機防控系統(tǒng)在防御重合區(qū)域內(nèi)同時擁有兩型防控設備(即:導航通信干擾設備和定向干擾設備),對任一敵對“低小慢”目標,可以隨意分配目指給兩型防控設備,對多批敵對“低小慢”目標,兩型防控設備可以進行協(xié)同打擊,大幅度提升了系統(tǒng)的防控效果。

圖9 系統(tǒng)的組織結構

圖10 新型無人機防控系統(tǒng)運行流程圖
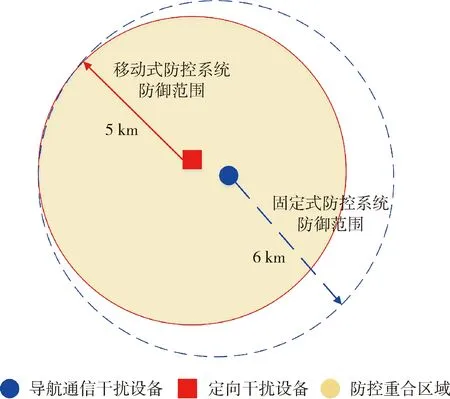
圖11 重合式系統(tǒng)部署示意圖
尤其在當前無人機蜂群作戰(zhàn)越來越受到各國重視的情況下[13-15],上述新型無人機防控系統(tǒng)有效提高了作戰(zhàn)效能,在指揮控制設備自動轉火的設置下,可以短時間內(nèi)對多批敵對“低小慢”目標進行干擾打擊。
2.3 遠程協(xié)同干擾技術
若新型無人機防控系統(tǒng)在部署時,采用固定式防控系統(tǒng)與移動式防控系統(tǒng)防御區(qū)域相互遠離,但都在低空空域監(jiān)視雷達探測范圍內(nèi)的方式(如圖12所示),則綜合指揮控制設備可以將探測到的目標信息發(fā)送給車載指揮系統(tǒng),發(fā)揮遠程協(xié)助打擊的作用,尤其在低空小目標探測雷達由于其他因素探測不到目標時,遠程協(xié)助打擊技術將起到關鍵性作用。
此部署方式另一大優(yōu)勢就是擴大了防御范圍,固定式防控系統(tǒng)和移動式防控系統(tǒng)可以分別部署在2個重點區(qū)域,起到相互協(xié)同干擾的效果。
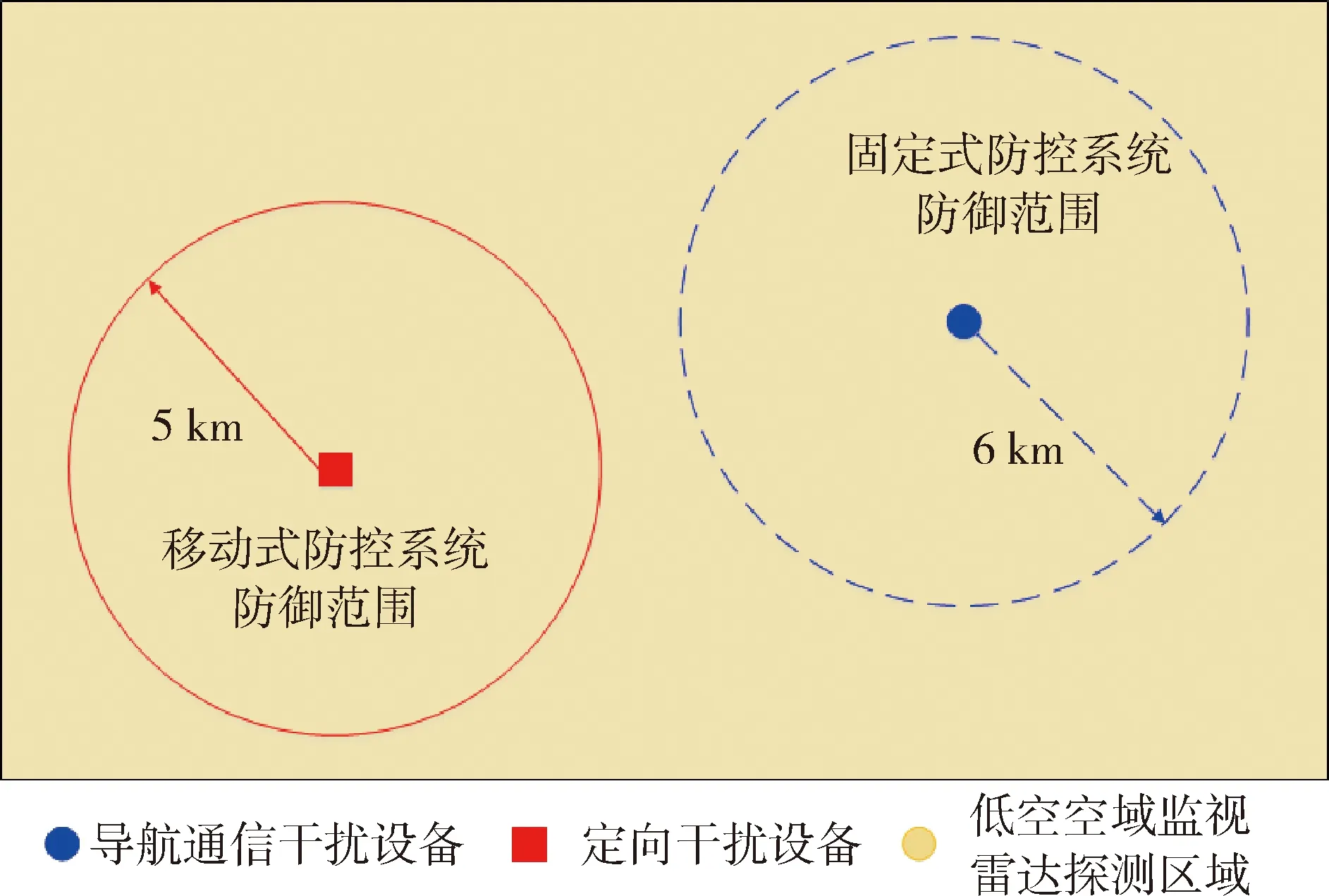
圖12 分離式系統(tǒng)部署示意圖
3 試點應用
3.1 試點應用背景
中國船舶重工集團于2018年5月至2019年5月在寧夏中衛(wèi)沙坡頭機場,進行了低空通航管理系統(tǒng)的建設,目前正在試點應用階段。新型重點區(qū)域無人機防控系統(tǒng)作為低空通航管理系統(tǒng)中的重點建設內(nèi)容之一,旨在保障低空空域的安全,對非法侵入低空空域的“低小慢”目標進行防控。
3.2 試點應用情況
3.2.1 試點參與設備
新型重點區(qū)域無人機防控系統(tǒng)參試設備包括:低空空域監(jiān)視雷達、低空小目標探測雷達(車載)、光電設備跟蹤設備、光電設備識別(車載)、綜合指揮控制設備、車載指揮控制設備、導航通信干擾設備以及定向干擾設備(車載)。
3.2.2 試點部署情況
為測試新型無人機系統(tǒng)的功能和性能,試點應用中,新型無人機防控系統(tǒng)分別采用了重合式部署方式及分離式部署方式。重合式部署方式中,固定防控系統(tǒng)和移動式防控系統(tǒng)均部署在沙坡頭機場航管樓附近(圖13中的點1和2),主要負責航管樓、航站樓及航油基地等重點設施的低空安全。分離式部署方式中,固定防控系統(tǒng)部署在沙坡頭機場航管樓(圖13中的點1),移動式防控系統(tǒng)部署在重要的飛機航路上(圖13中的點3),主要負責飛行航路上的低空安全,具體部署情況如圖13所示。
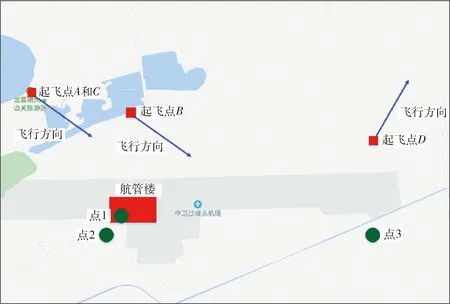
圖13 試點應用系統(tǒng)部署示意圖
此次試點應用分別使用了2架大疆四旋翼無人機,大疆精靈4(無人機Ⅰ)與大疆精靈4PRO(無人機Ⅱ),實物如圖14所示,共進行了2種類型的試驗。
試驗1: 在沙坡頭機場附近同時起飛2架無人機(圖13中的點A和點B),模擬“黑飛”的敵對“低小慢”目標,試驗主要針對的是重合式部署方式。
試驗2: 在沙坡頭機場附近(圖13中的點C)以及飛機重要飛行航路附近(圖13中的點D)同時起飛,模擬“黑飛”的敵對“低小慢”目標,試驗主要針對的是分離式部署方式。

圖14 試點應用中使用的無人機
3.2.3 試點應用效果
系統(tǒng)按照圖10中的運行流程,開始進行無人機防控工作。
對于試驗1,首先,低空空域監(jiān)視雷達和低空小目標探測雷達(車載系統(tǒng))同時工作進行目標捕捉,低空空域監(jiān)視雷達和低空小目標探測雷達(車載系統(tǒng))在短時間內(nèi)都捕捉到了2架無人機目標,之后將目標信息發(fā)送給綜合控制設備,綜合控制設備調度光電識別跟蹤設備對目標身份信息進行確認,確認為無人機后由綜合控制設備給兩型干擾設備分配目指,最后干擾設備對無人機進行干擾,多次的試驗結果表明2架無人機均被成功干擾,被迫懸停或返航,成功體現(xiàn)了系統(tǒng)的多目標協(xié)同打擊技術。
對于試驗2,采取了2種方式,第1種方式中,低空空域監(jiān)視雷達和低空小目標探測雷達(車載系統(tǒng))同時工作,低空空域監(jiān)視雷達在短時間內(nèi)就捕捉到了2架模擬“黑飛”的無人機,低空小目標雷達也在較短時間內(nèi)捕捉到了一架模擬“黑飛”的無人機(另一架不在搜索范圍內(nèi)),上傳目標信息給綜合控制設備后,綜合控制設備調度光電識別設備進行身份確認,確認身份后,綜合指揮控制設備根據(jù)兩型干擾設備的打擊范圍,智能分配目指,由導航通信干擾設備對無人機Ⅰ進行了干擾,定向干擾設備對無人機Ⅱ進行了干擾,多次的試驗結果表明均干擾成功。在第2種方式中,低空小目標雷達不開機(模擬故障),車載指揮控制設備使用的是綜合控制設備發(fā)送的目標信息,同樣實現(xiàn)了對無人機的干擾打擊,驗證了遠程協(xié)助打擊技術的有效性。
試驗過程中,無人機被干擾后,操控畫面顯示如圖15所示(因試驗次數(shù)較多,圖中只放了部分干擾畫面)。
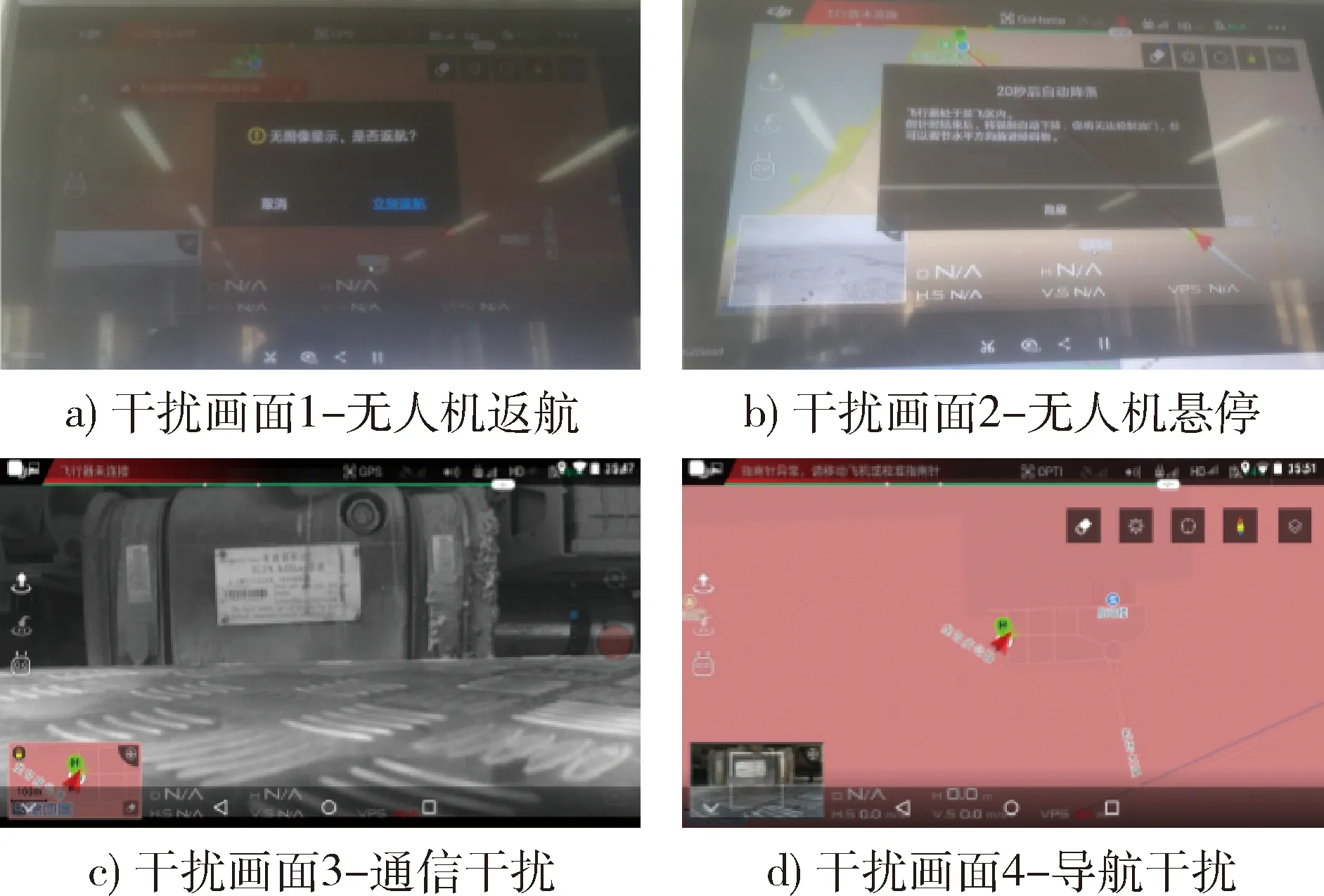
圖15 無人機被干擾后的操控畫面
從圖15中可以看出,2架無人機被干擾后,無人機的操控畫面顯示飛行器未連接或開始返航等,表明干擾打擊成功。
4 結束語
隨著無人機技術的不斷發(fā)展,未來無論在民用或是軍用領域,無人機的使用將會越來越多,但同時給低空空域的安全帶來了更嚴峻的挑戰(zhàn)。本文提出的新型無人機防控系統(tǒng)通過集成固定式防控系統(tǒng)和移動式防控系統(tǒng)于一體,將各自的優(yōu)劣勢進行互補,有效提高系統(tǒng)機動性的同時,大幅度提升了系統(tǒng)的功能和性能,是對反無人機系統(tǒng)領域的重要探索。
目前,國內(nèi)外反無人機系統(tǒng)正處于快速發(fā)展階段,但依然面臨著許多問題,例如,缺乏新型無人機對抗設備、系統(tǒng)建設成本高、無法有效應對多批次蜂群式無人機攻擊等。在后續(xù)研究中,應深入分析反無人機作戰(zhàn)的需求,密切關注蜂群無人機的發(fā)展,不斷提出新的反無人機作戰(zhàn)策略,同時也要不斷研制新的反無人機設備。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設計(2022年8期)2022-09-09 07:43:20
環(huán)球時報(2022-04-25)2022-04-25 17:20:21
今日農(nóng)業(yè)(2021年15期)2021-10-14 08:20:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
人大建設(2020年3期)2020-07-27 02:48:40
今日農(nóng)業(yè)(2019年14期)2019-09-18 01:21:44
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
