環形立交匝道汽車橫向加速度特征實車測試研究
2020-05-07 09:12:42張曉波
科學技術與工程 2020年8期
關鍵詞:舒適性
張曉波, 林 偉
(1.中鐵第四勘察設計院集團有限公司,重慶 400063;2.重慶市軌道交通集團有限責任公司,重慶 401120)
對于高速公路和快速路,匝道以及鄰近匝道區段一直是事故高發區域。環形匝道主要用于苜蓿葉形互通立交和喇叭口互通立交的左轉交通轉換,是城市立交和公路立交最常使用的匝道形式之一。環形匝道由于技術指標較低,在通行能力、安全性、舒適性等方面均是瓶頸和薄弱點。
環形匝道是一類典型的小半徑、大轉角急彎路段。對于曲線路段而言,橫向加速度是描述彎道運行狀態和汽車行駛穩定性、舒適性的主要指標。現有關于互通立交的研究主要集中在互通出入口的車輛運行狀態和駕駛行為,包括車輛在立交出口的軌跡特性以及駕駛人性別、駕駛經驗和職業對換道軌跡的影響[1];使用鏈式雷達追蹤互通立交入口的車輛行駛速度,建立合流速度、合流長度、加速度模型以及右側車道速度模型[2];基于高空視頻圖像分析的立交匝道連續行駛速度特性[3];螺旋立交匝道和螺旋橋的速度模式[4];立交出入口和交織段的駕駛行為[5-6];基于智能手機APP的立交匝道幾何參數估計與臨界行駛速度預警[7]等。這些研究都未涉及立交匝道的橫向加速度。而與橫向加速度或是橫向力系數相關的研究有:曲線路段上不同駕駛風格駕駛人的橫向加速度差異性以及橫向加速度在高速行駛時的衰減性[8],山區道路條件下橫向加速度與彎道半徑之間的相關性[9-10],橫向加速度與速度之間的相關性[10-11];基于加速度數據的山區低等級公路和高速公路的行駛舒適性分析,以及橫向加速度閾值修正[12-13];基于橫向加速度變化率的超高過渡方式分析和車道數變化段指標研究[14-15];換道時的橫向加速度特性[16];基于橫向加速度的公路線形安全性評價[17-18]。這些研究都是面向公路主線,沒有涉及立交匝道。
綜上,通過現有的研究無法了解到互通立交匝道尤其是環形匝道的橫向加速度特征,難以評判環形立交匝道的行駛舒適性和安全性。為此,開展互通立交實車駕駛實驗,采集自然駕駛狀態下橫向加速度數據,明確環形匝道橫向加速度的幅值特征和變化模式。
1 試驗方案
1.1 立交對象
在重慶轄域內選擇4座苜蓿葉形互通立交作為試驗對象,其中主城區3座,為人和立交、北環立交和東環立交,均是完全苜蓿葉形互通立體交叉,其中北環立交連接的2條高速道路為斜交,交叉角度為64°(銳角);涪陵區1座,為鵝頸關立交,是部分苜蓿葉形互通式立體交叉。環形匝道的主要技術指標如表1所示,4座互通立交的平面圖如圖1所示。
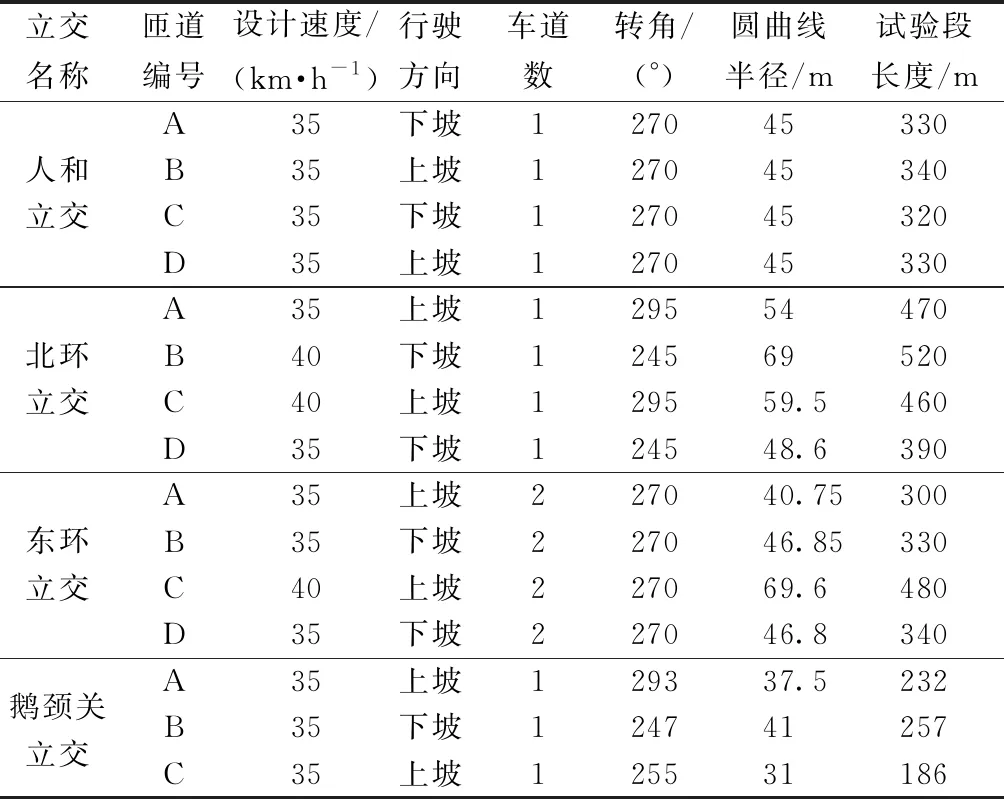
表1 環形匝道主要技術指標
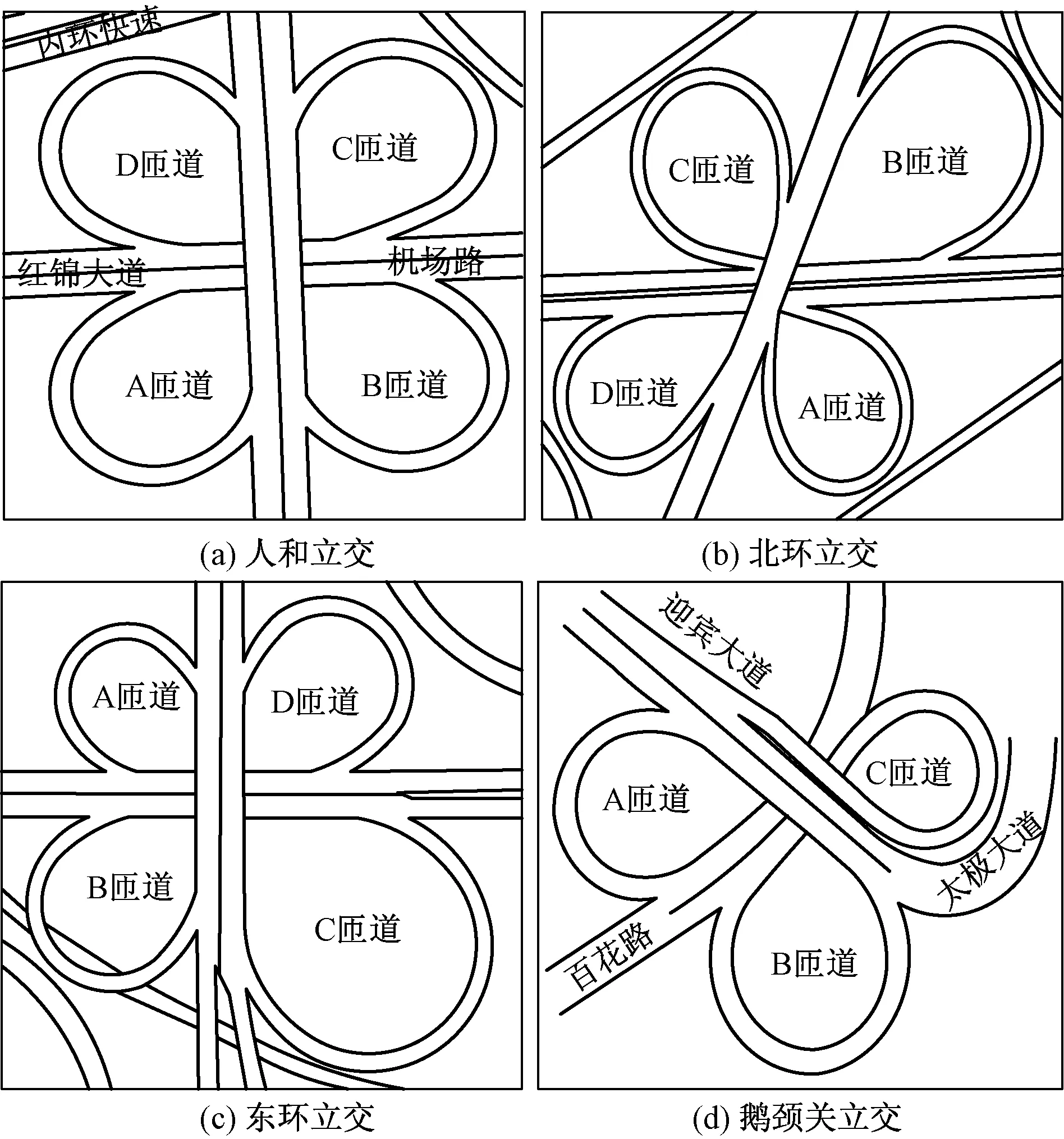
圖1 試驗立交以及環形匝道序號Fig.1 Loop ramps of the test interchanges
1.2 試驗車輛和被試
單一的車載全球定位系統(global position system,GPS)設備在山區道路行駛環境下,路側高層建筑、高架橋/立交橋橋面板和路側茂密植被會遮擋衛星信號,導致汽車位置坐標實時數據缺失,速度數據失真或者中斷。用航姿測量系統[慣性測量單元(inertial measurement unit,IMU)與雙GPS天線相組合]來記錄汽車軌跡、速度、加速度和行駛姿態數據,在GPS信號丟失時,系統算法對慣導單元測得的加速度信號進行積分,來完成斷檔數據的補償。在汽車前后玻璃上各安裝1個行車記錄儀,分別攝錄前、后的向行駛環境。試驗車型為7座商務車。試驗車輛如圖2所示。
共有8位駕駛人參與3座苜蓿葉立交的實車駕駛試驗,其中男性5人,女性3人,年齡分布為23~56歲,平均年齡31.5歲,駕齡分布1~22年,平均駕齡7.6年,駕駛里程分布為(0.3~50)×104km,平均為17.29×104km。被試是從社會上招募,熟悉車輛狀況和駕駛操作。
1.3 試驗流程與數據處理
試驗開始前告知駕駛人按照平日的駕駛風格來操縱車輛,行駛過程中不對被試提出任何要求也不進行任何暗示,最大程度地維持駕駛員的自然駕駛習慣。自然駕駛試驗的時間跨度為2016年6月至2017年10月,均安排在10:00—17:00時段內進行,避開擁堵時段。

圖2 試驗車輛Fig.2 Test vehicles
苜蓿葉形互通立交連接的是封閉的、中間有隔離帶的高速道路,無法就近在高速公路路面上完成調頭。因此,在實驗前規劃行駛路線,包括數據記錄起點、前方掉頭位置和方式等。環形匝道是通過右轉270°來實現左轉,駕駛人每次行駛可以遍歷4個匝道。駕駛人遍歷全部匝道之后向前行駛至臨近立交,通過兩個環形匝道的旋轉實現掉頭,返回至試驗立交,繼續下一次匝道遍歷。根據現場試驗條件和交通狀況,每位被試完成試驗路線的3~6次遍歷行駛。
在后期試驗數據處理過程中,截取匝道范圍內的汽車行駛速度和橫向加速度(ay)數據,繪制連續的橫向加速度曲線。同時,觀察前置行車記錄儀的視頻圖像,對前方有慢行車輛,比如大貨車、大巴車等情況進行標記。

圖3 橫向加速度數據濾波以及切割Fig.3 Filtered curves of lateral acceleration
橫向加速度信號是通過IMU單元模塊的加速度計采集,IMU固定在汽車座椅下方,行駛過程中汽車的振動會導致橫向加速度信號出現高頻振蕩,即橫向加速度信號的構成原來有兩部分,一是汽車曲線行駛過程中由于匝道軌跡曲率產生的車身橫向加速度,二是車身構件高頻振動導致的橫向加速度。試驗關心的是第一類信號源,因此第二類信號可視為噪聲需要剔除。為此,在分析之前使用MATLAB軟件中的濾波工具箱對數據進行濾波,之后再對曲線進行分割,即每次匝道行駛得到1條橫向加速度連續(ay)曲線,如圖3所示。
2 橫向加速度連續變化特征
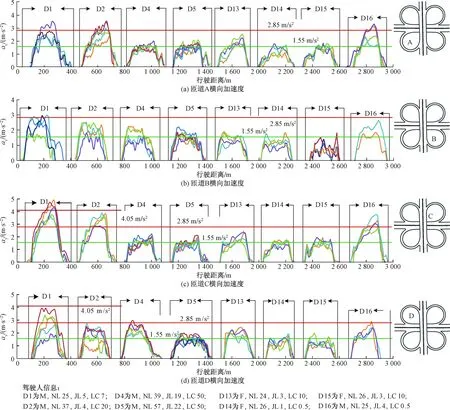
圖4 人和立交環形匝道橫向加速度變化曲線Fig.4 Lateral acceleration measured on loop ramps of Renhe interchange
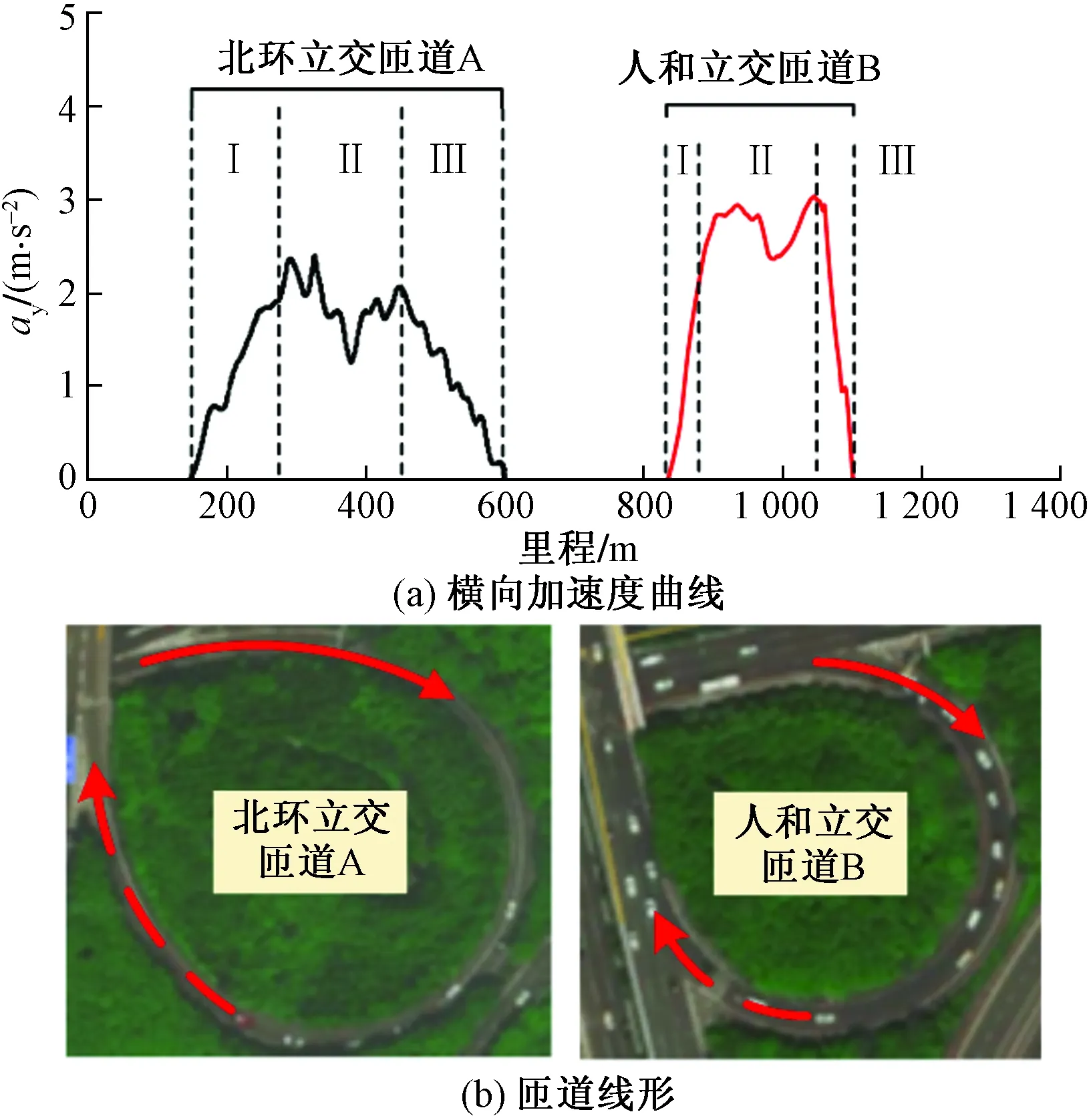
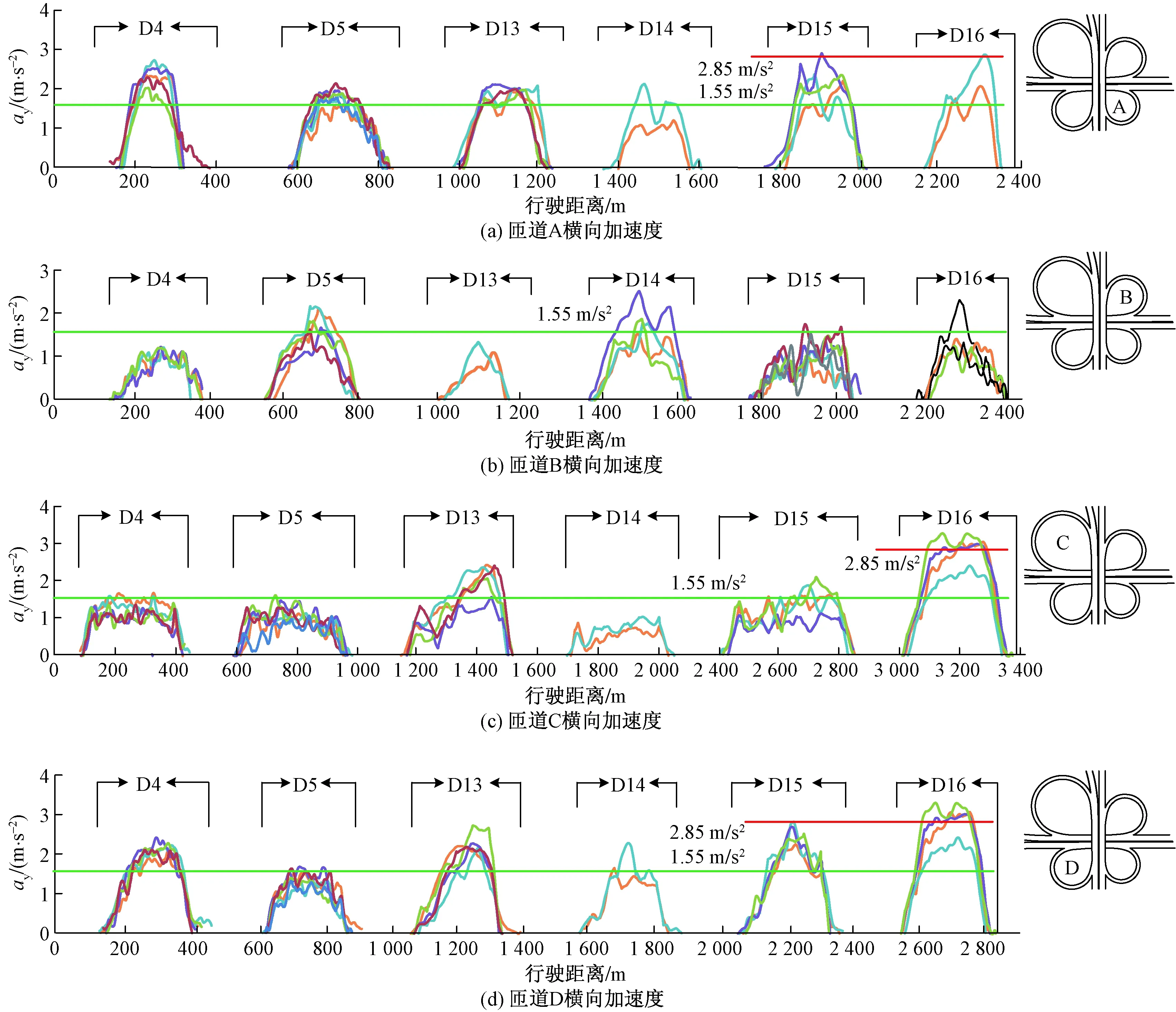
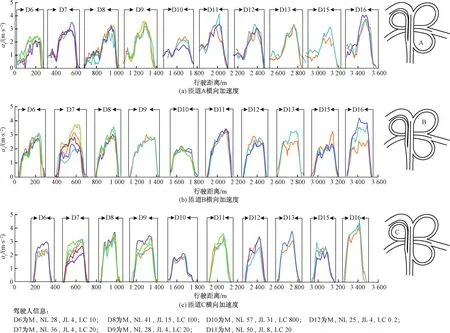
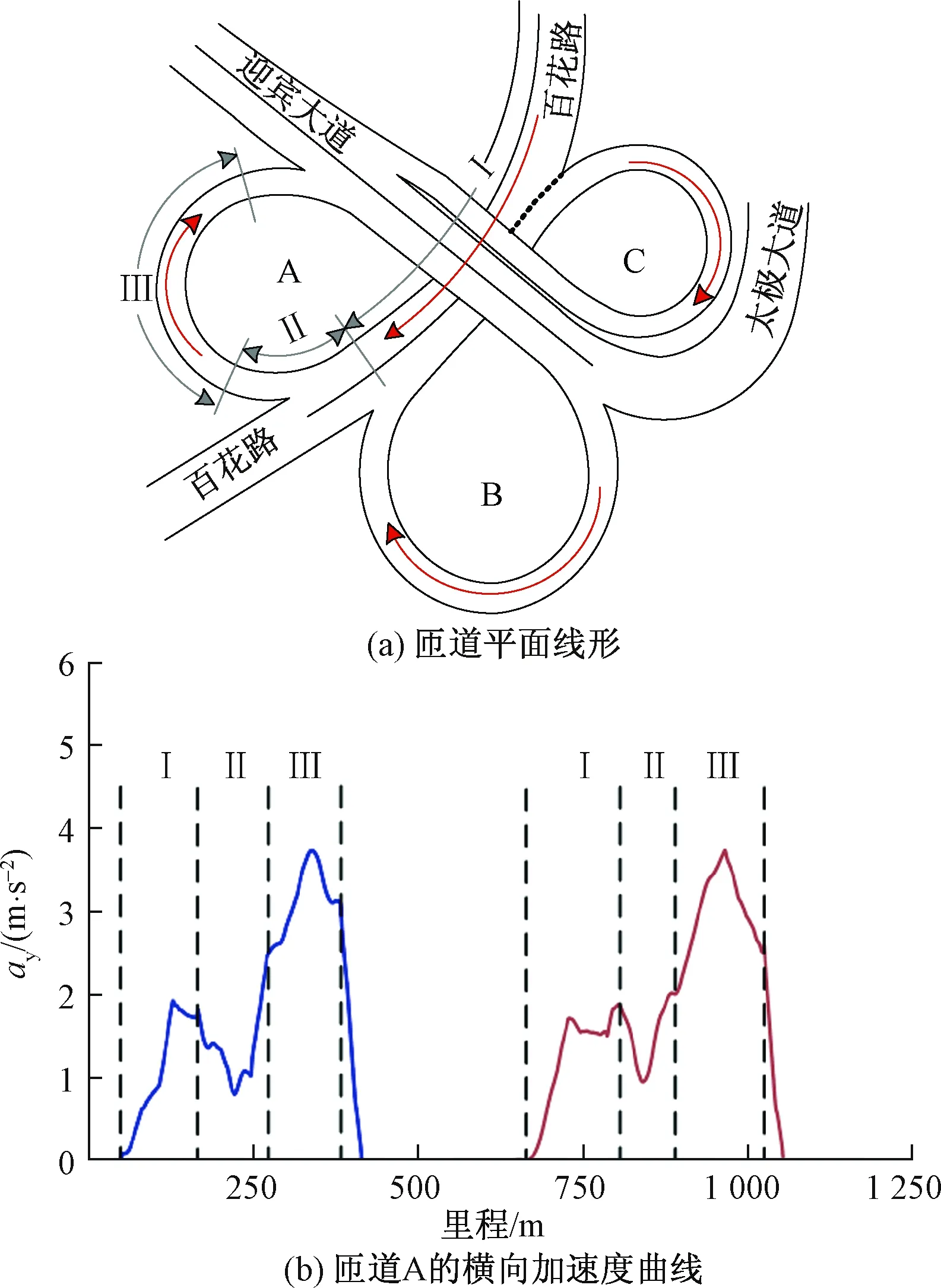
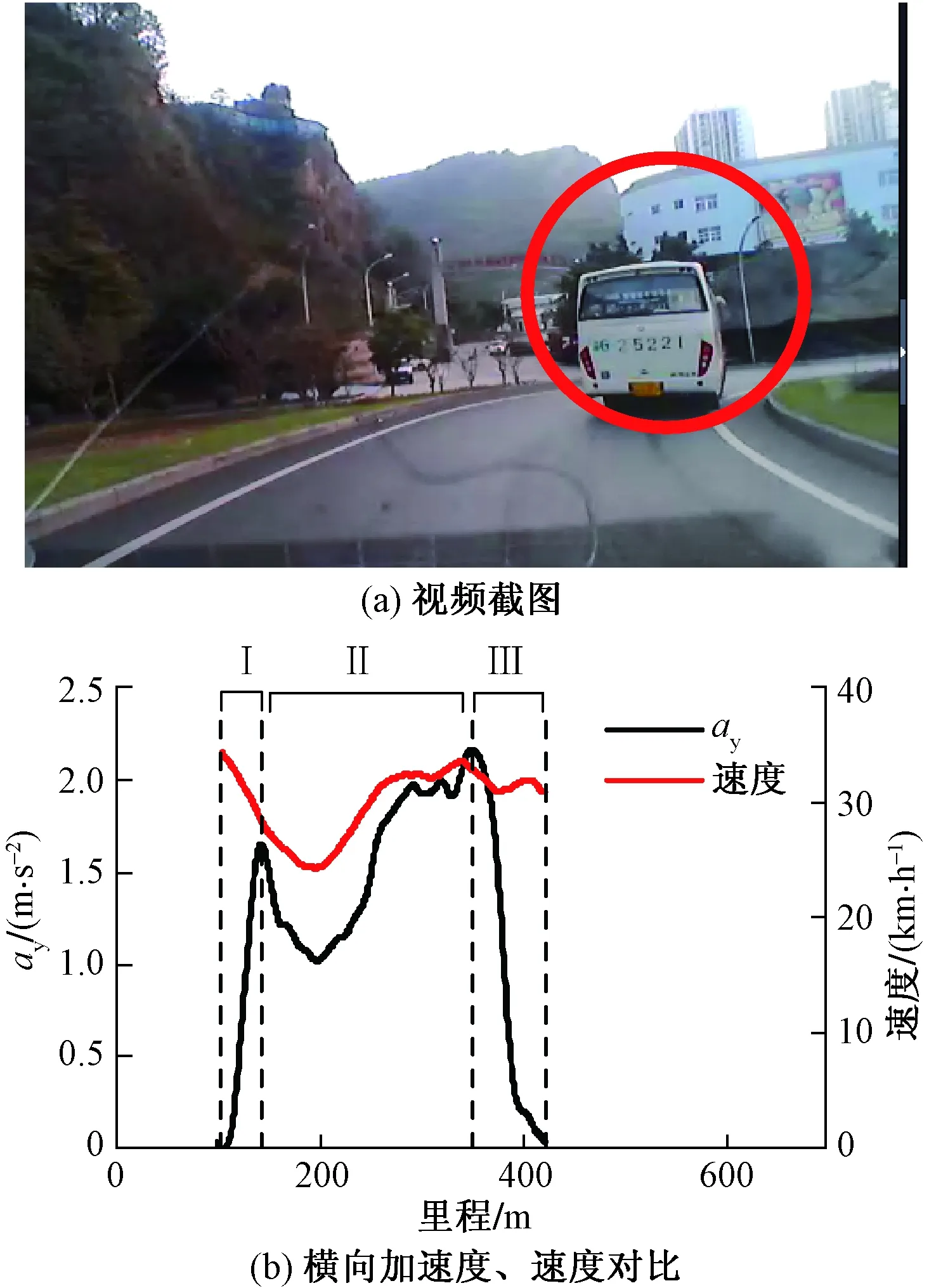
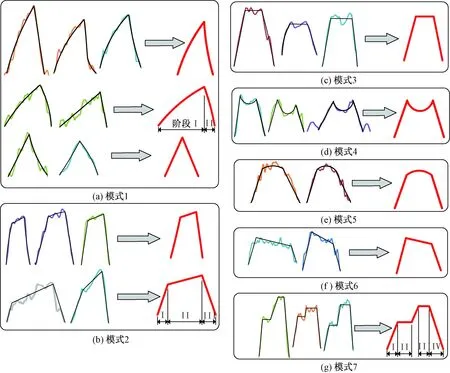
某位駕駛人在某一互通立交上的行駛遍數為n,對于該位駕駛人,每條立交匝道可得到n條ay曲線,然后將n條曲線疊加在一起,得到該駕駛人在環形匝道范圍內的橫向加速度曲線圖。圖4~圖7所示是4座苜蓿葉形立交各條環形匝道的橫向加速度連續變化曲線,圖中的Di為駕駛人編號,曲線圖下方給出了駕駛人的主要信息,其中字母M表示駕駛人為男性,F為女性,NL為年齡,JL為駕齡,LC為該駕駛人自取得駕照以來的累計行駛里程,單位為104元km。圖中同時標注了基于ay值的橫向舒適性閾值,即ay>4.05 m/s2時不舒適且難以忍受,2.85 m/s2 圖4所示為人和立交(位于重慶主城區)4條環形匝道的ay曲線,該立交的環形匝道同時滿足軸對稱與中心對稱條件,相交道路的交叉角為90°,是標準的苜蓿葉形樣式。從圖中可見,不同的駕駛人在同一條匝道上的橫向加速度幅值(峰值或峰值點附近的幅值)之間存在比較大的差異;但根據幅值水平大致將其分為2類,第1類駕駛人選擇比較高的ay,有D1、D2和D16,第2類是選擇較低橫向加速度幅值的駕駛人,包括D4、D5和D13、D15。由于橫向加速度與速度正相關,因此第1類駕駛人比較高的橫向加速度值是由于環形匝道行駛速度較高導致的結果;同時,同一類的駕駛人在不同的匝道上均表現出了穩定的駕駛行為特征(比如D1在4條匝道上的ay均很高)。就舒適性而言,僅駕駛人D1在C匝道行駛時橫向加速度超出了難以忍受閾值;更多的是分布在“舒適性一般”區間。 就ay連續曲線的外觀形態而言,在圖4中,在同一匝道上不同駕駛人的曲線形態差別較大;同時,同一位駕駛人在不同的匝道上行駛時,橫向加速度曲線也有差別,以駕駛人D1為例,C匝道和D匝道橫向加速度曲線形態的差異非常大。 圖5 北環立交環形匝道橫向加速度變化曲線Fig.5 Lateral acceleration measured on loop ramps of Beihuan interchange 圖5所示為北環立交環形匝道的橫向加速度連續曲線,該立交連接的相交道路交叉角為64°。與連接正交道路的環形匝道相比(比如人和立交環形匝道),北環立交環形匝道平面線形的圓曲線長度比例降低,而緩和曲線長度在平曲線長度中的占比增加。由于這個因素,ay曲線的外觀形態與人和立交相比存在一個明顯差別:汽車駛入環形匝道后ay增長的速率較慢,駛出匝道時ay降低的速度同樣較慢,如圖6所示。在幅值水平方面,僅有被試D13在匝道A、被試D16在匝道D上有ay超過不舒適閾值,其余的ay曲線峰值有一半是在“舒適性一般”區間,還有一半是在1.55 m/s2之下,即舒適性良好。圖7所示為東環立交各條環形匝道的ay曲線,駕駛人D16的ay幅值顯著高于其余駕駛人;匝道B和C有多個駕駛人的ay曲線幅值是全部低于1.55 m/s2,行駛舒適性優于前兩座立交的環形匝道。 圖6 橫向加速度增長率與匝道平面線形Fig.6 Increase rate of lateral acceleration and ramp alignment 圖7 東環立交環形匝道橫向加速度變化曲線Fig.7 Lateral acceleration measured on loop ramps of Donghuan interchange 圖8所示為重慶市涪陵區鵝頸關立交環形匝道的ay連續曲線,從中能觀察到3個顯著特征:一是駛入匝道后ay幅值增長更快,駛出匝道時也更快地回落;二是ay幅值更高,落在不舒適區間的比例顯著高于前3座立交的環形匝道,即環形匝道的橫向舒適性變差;三是匝道中段ay曲線幅值呈現上揚的趨勢,表明駕駛人在匝道中段有加速行為。 此外,在圖8中觀察到A匝道上的ay曲線并不是從零值開始,即汽車在進入A匝道之前已經承受了一定的橫向加速度。查看鵝頸關的路線地圖,發現A匝道連接的百花路(駕駛人從百花路駛入A匝道),其平面線形是曲線,如圖9(a)所示,因此是曲線行駛導致了ay曲線在階段Ⅰ[圖9(b)]幅值不為零。另外,ay曲線在階段Ⅱ發生幅值衰減是因為駕駛人在立交出口(即匝道入口)有減速行為所致。 在圖4、圖5、圖7和圖8中,能觀察到ay曲線在經歷快速增長之后,幅值會達到一個相對穩定的階段,但在該階段,大多數ay曲線即使濾波之后仍會有明顯的震蕩。曲線行駛時導致ay曲線震蕩的原因主要有3種:一是軌跡曲率發生變化;二是行駛速度發生變化;三是路面不平順導致的車身側傾搖動等。4座立交中,僅東環立交的環形匝道是雙車道匝道,其余都是單車道。但即使是雙車道匝道,通過觀察前置行車記錄儀視頻圖像和GPS軌跡發現,駕駛人在匝道范圍內都極少變道,即全程保持內側車道或者外側車道行駛,軌跡曲率突變的概率非常低。基于此,ay曲線震蕩的原因主要是后兩種,即速度變化和車身搖擺。其中速度變化導致的震蕩特點是低頻、但幅值較大。圖10所示為一例由于速度變化導致的ay曲線震蕩,實驗車駛入匝道后,駕駛人發現前方路面上有一輛大客車緩行,如圖10(a)所示,因此降低行駛速度以保持安全車距,如圖10(b)所示。 在圖4~圖8中觀察到,不同駕駛人之間、不同匝道之間的橫向加速度曲線外觀形態均存在顯著的差異,但仍可以對其進行歸類。對ay曲線進行趨勢線擬合,可以抽象出其幅值變化模式,如圖11所示,一共有7種變化模式。其中模式1是兩階段模式(駛入增長階段和駛出回落階段),ay幅值達到峰值之后隨即下降,既沒有經歷幅值相對穩定的中間階段。模式7是四階段模式,除了駛入增長階段和駛出回落階段之外,中間過程由于幅值出現了階躍又可細分為兩個階段。模式2~模式6都是三階段模式,即駛入增長階段、中間穩定階段和駛出回落 圖8 鵝頸關立交環形匝道橫向加速度變化曲線Fig.8 Lateral acceleration measured on loop ramps of Ejingguan interchange 圖9 鵝頸關立交A匝道的橫向加速度Fig.9 Lateral acceleration on ramp A of Ejingguan interchange 圖10 橫向加速度異常波動分析Fig.10 Abnormal fluctuations of lateral acceleration curves 圖11 橫向加速度典型變化模式Fig.11 Typical patterns of lateral acceleration curves 階段,不同模式之間的區別主要體現在中間穩定階段的變化形態上;并且,僅有模式3的ay幅值在中間階段是維持穩定,其余模式的ay幅值都是變化的。 在ay曲線的各種模式中,模式2(中間階段ay幅值持續增長)是占比最大的一種模式,尤其是行駛速度偏高、ay幅值較大的情況下,比如鵝頸關立交。此外,模式1的ay幅值變化與現行的設計假設完全不同,由于匝道中段是曲率半徑恒定的圓曲線,ay幅值一直在變化的原因是汽車行駛速度在圓曲線范圍內一直在調整;并且此類模式都是發生在ay幅值非常高的駕駛人身上。 環形匝道具有小半徑、大轉角、坡度陡等顯著特征,是普遍認為行駛條件相對困難的路段單元類型。橫向加速度是衡量彎坡組合路段行駛安全性和舒適性的主要參數,但從現有的研究中無從了解到環形匝道的橫向加速度特征,為此通過實車試驗采集了自然駕駛條件下的汽車橫向加速度連續數據,明確了環形匝道的橫向加速度幅值水平、變化趨勢和模式,主要結論如下。 (1)不同駕駛人的橫向加速度曲線幅值和外觀形態存在顯著差異,但可以對其進行歸類。 (2)在所觀測的4座立交中,3座完全苜蓿葉形互通立交環形匝道的橫向舒適性水平一般,1座部分苜蓿葉形立交環形匝道的舒適性水平較差(不舒適)。 (3)環形匝道的橫向加速度變化模式可以分為7種,其中三階段模式為5種,兩階段和四階段各1種,占比最大的模式特征是橫向加速度值在匝道中間階段仍是單調上升的。 (4)緩和曲線的長度對橫向加速度增長率有顯著影響,進而影響到橫向加速度變化模式。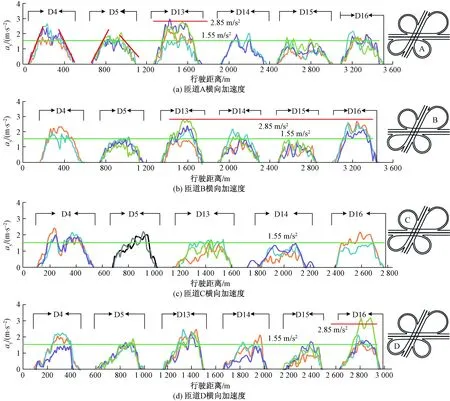
3 橫向加速度幅值波動分析
4 橫向加速度幅值變化模式
5 結論
猜你喜歡
福建輕紡(2022年4期)2022-06-01 06:26:06
載人航天(2021年5期)2021-11-20 06:04:36
毛紡科技(2021年8期)2021-10-14 06:51:26
現代儀器與醫療(2021年2期)2021-07-21 02:19:12
紡織科技進展(2021年3期)2021-06-09 08:07:18
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
工業設計(2016年11期)2016-04-16 02:48:02
消費者報道(2016年3期)2016-02-28 19:07:32
汽車實用技術(2015年8期)2015-12-26 09:01:02