C-V2X應(yīng)用場(chǎng)景的算法建模及評(píng)價(jià)模型綜述
2020-05-06 02:54:38董馨南洋陳博馮舒劉曉東
汽車(chē)文摘 2020年5期
關(guān)鍵詞:評(píng)價(jià)模型
董馨 南洋 陳博 馮舒 劉曉東
(中國(guó)第一汽車(chē)股份有限公司 智能網(wǎng)聯(lián)開(kāi)發(fā)院,長(zhǎng)春 130013)
主題詞:C-V2X 應(yīng)用場(chǎng)景 算法建模 算法評(píng)價(jià)模型 算法性能
縮略語(yǔ)
C-V2X Cellular-Vehicle to Everything(車(chē)聯(lián)網(wǎng))
3GPP 3rd Generation Partnership Project(第三代合作伙伴計(jì)劃)
ITS Intelligent Transportation System(智能交通系統(tǒng))
V2V Vehicle to Vehicle(車(chē)與車(chē))
V2I Vehicle to Infrastructure(車(chē)與基礎(chǔ)設(shè)施)
V2P Vehicle to Pedestrian(車(chē)輛與行人)
ICW Intersection Collision Warning(路口碰撞預(yù)警)
HV Host Vehicle(主車(chē))
RV Remote Vehicle(遠(yuǎn)車(chē))
BSM Basic Safety Message(基本安全消息)
EMMC Embedded Multi Media Card(嵌入式多媒體卡)
1 前言
C-V2X(Cellular-Vehicle to Everything)作為新一代信息通信技術(shù),旨在實(shí)現(xiàn)車(chē)與人、車(chē)與車(chē)、車(chē)與路、車(chē)與服務(wù)平臺(tái)的全方位網(wǎng)絡(luò)連接[1]。C-V2X與生俱來(lái)的優(yōu)勢(shì)包括寬視野、低干擾、低時(shí)延、更穩(wěn)定、更兼容可讓當(dāng)下的交通環(huán)境變得更安全,并使未來(lái)的自動(dòng)駕駛成為可能。
寬視野,即C-V2X依靠蜂窩網(wǎng)絡(luò)進(jìn)行通信,帶來(lái)的非視距(NLOS)通信能力即繞過(guò)障礙物感知環(huán)境的能力,使得駕駛者在轉(zhuǎn)彎處、前車(chē)阻擋時(shí)、夜晚和惡劣天氣里,都能進(jìn)行更好地預(yù)測(cè)和決策。低干擾,即CV2X直接利用統(tǒng)一的專(zhuān)用ITS頻譜支持車(chē)對(duì)車(chē)、車(chē)對(duì)行人、車(chē)對(duì)基礎(chǔ)設(shè)施直接通信,就像開(kāi)辟了一條VIP通道,為安全保駕護(hù)航。低時(shí)延,即C-V2X是面向低延遲直接通信而設(shè)計(jì),不依賴(lài)網(wǎng)絡(luò)協(xié)助。C-V2X無(wú)線直連通信可提供更大范圍的通信能力和增強(qiáng)的可靠性,而擺脫蜂窩網(wǎng)絡(luò)的協(xié)助或覆蓋。更穩(wěn)定,即無(wú)線蜂窩技術(shù)就是為支持高速而設(shè)計(jì)的,3GPP組織提出的R14標(biāo)準(zhǔn)針對(duì)高速車(chē)輛用例進(jìn)行了增強(qiáng),在不同道路狀況下支持相對(duì)速度高達(dá)500 km/h,另外,3GPP還定義了嚴(yán)格的最低性能要求規(guī)范,以確保可預(yù)測(cè)、統(tǒng)一且有保證的體驗(yàn),支持與道路安全同等重要的應(yīng)用。更兼容,即C-V2X是唯一具有清晰5G演進(jìn)路徑的V2X技術(shù),并后向/前向兼容。C-V2X演進(jìn)將納入5G新空口特性,為自動(dòng)駕駛和先進(jìn)用例提供高吞吐量、寬帶載波支持、超低延遲和高可靠性。此外,它可以提供更豐富的差異化體驗(yàn)。隨著進(jìn)入5G和自動(dòng)駕駛的世界,這一切都將讓汽車(chē)成為一個(gè)最主要的用例。C-V2X借助于人、車(chē)、路、云平臺(tái)之間的全方位連接和高效信息交互,支持交通安全類(lèi)、效率類(lèi)和信息服務(wù)類(lèi)以及自動(dòng)駕駛協(xié)同類(lèi)多類(lèi)應(yīng)用[1],多類(lèi)應(yīng)用的實(shí)現(xiàn)是支撐V2X技術(shù)有力的保障,但目前缺乏對(duì)實(shí)現(xiàn)的標(biāo)準(zhǔn)評(píng)估。利用仿真測(cè)試環(huán)境,對(duì)應(yīng)用場(chǎng)景算法進(jìn)行建模,并建立一個(gè)標(biāo)準(zhǔn)的評(píng)估體系,可針對(duì)C-V2X應(yīng)用場(chǎng)景進(jìn)行多維度的性能評(píng)價(jià),以輸出準(zhǔn)確的結(jié)果、有效利用C-V2X通信特性達(dá)到物盡其用。
2 C-V2X典型應(yīng)用場(chǎng)景需求分析及核心算法
2.1 C-V2X典型應(yīng)用場(chǎng)景需求分析
參考中國(guó)汽車(chē)工程學(xué)會(huì)的行業(yè)標(biāo)準(zhǔn)(T/CSAE 53-2017)《合作式智能運(yùn)輸系統(tǒng)車(chē)用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)》[2]中選出的涵蓋安全、效率、信息服務(wù)的17個(gè)典型應(yīng)用作為第一期應(yīng)用。

表1 V2X應(yīng)用場(chǎng)景列表[2]
針對(duì)表1中的每個(gè)場(chǎng)景,都需要進(jìn)行詳細(xì)的場(chǎng)景分析,從如下維度進(jìn)行:場(chǎng)景詳細(xì)描述、前置條件、輸入/輸出、事件流程、硬件要求、功能要求,并依據(jù)分析的情況對(duì)場(chǎng)景進(jìn)行設(shè)計(jì)并建立算法模型。
2.2 C-V2X應(yīng)用場(chǎng)景需求分析實(shí)例
本節(jié)針對(duì)表1中交叉路口碰撞預(yù)警(Intersection Collision Warning,ICW)應(yīng)用場(chǎng)景,詳細(xì)分析交叉路口工況下利用V2X技術(shù)如何有效實(shí)現(xiàn)避撞。
主車(chē)(Host Vehicle,HV)駛向交叉路口,與側(cè)向行駛的遠(yuǎn)車(chē)(Remote Vehicle,RV)存在碰撞危險(xiǎn)時(shí),ICW應(yīng)用將對(duì)HV駕駛員進(jìn)行預(yù)警。本應(yīng)用適用于城市及郊區(qū)普通道路及公路的交叉路口、環(huán)道入口、高速路入口等交叉路口碰撞危險(xiǎn)的預(yù)警。應(yīng)用場(chǎng)景示意圖如圖1所示。


圖1ICW應(yīng)用場(chǎng)景
前置條件:
定位精度:≤5 m
通信距離:≥150 m
輸入:
車(chē)載設(shè)備:車(chē)輛BSM
車(chē)輛:車(chē)速
輸出:
交叉碰撞預(yù)警信息
事件流程:
(1)RV發(fā)送BSM消息;
(2)HV接收RV的BSM消息;
(3)HV判斷RV是否與本車(chē)交叉行駛;
(4)HV預(yù)測(cè)是否與RV存在交叉碰撞危險(xiǎn),若存在發(fā)生危險(xiǎn)的可能,則向本車(chē)的顯示終端發(fā)送預(yù)警信息。
根據(jù)以上分析,可得ICW預(yù)警條件如下:
●RV處于HV交叉前方(包括交叉左前方和交叉右前方);
●RV與HV間距離小于設(shè)定閾值;
●RV與HV達(dá)到路口的時(shí)間差小于設(shè)定閾值;
●HV到達(dá)路口的時(shí)間小于設(shè)定閾值;
●HV行駛速度大于設(shè)定閾值。
需同時(shí)滿(mǎn)足上述所有條件才進(jìn)行預(yù)警,若上述任意一個(gè)條件不滿(mǎn)足則解除預(yù)警。
2.3 C-V2X應(yīng)用場(chǎng)景核心算法
C-V2X應(yīng)用場(chǎng)景在設(shè)計(jì)實(shí)現(xiàn)的過(guò)程中,需要建立核心算法,將復(fù)雜的工況抽象出來(lái),提取出核心的要點(diǎn),簡(jiǎn)化預(yù)警程序。以交叉路口碰撞預(yù)警為例,算法的核心是計(jì)算交叉碰撞時(shí)間,車(chē)輛交叉行駛示意圖如圖2所示。
如圖2所示,主車(chē)和遠(yuǎn)車(chē)交叉行駛,兩者之間存在交匯點(diǎn)I,根據(jù)三角形的正弦定理:
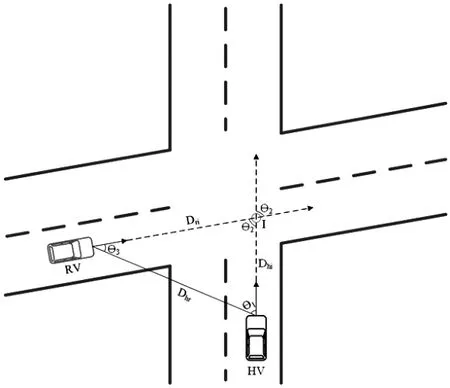
圖2 車(chē)輛交叉行駛示意

Hh—主車(chē)行駛方向角;
Hr—遠(yuǎn)車(chē)行駛方向角;
Hhr—本車(chē)到遠(yuǎn)車(chē)的方位角;
Dhr—主車(chē)和遠(yuǎn)車(chē)之間的距離。
可計(jì)算出主車(chē)到交叉點(diǎn)的距離Dhi和遠(yuǎn)車(chē)到交叉點(diǎn)的距離Dri,再根據(jù)車(chē)輛的速度和加速度,從而計(jì)算出車(chē)輛到交叉點(diǎn)的時(shí)間,通過(guò)時(shí)間差判斷兩車(chē)是否會(huì)發(fā)生碰撞。
3 算法建模
依據(jù)核心算法,結(jié)合Simulink建模工具,可以將算法的核心實(shí)現(xiàn)轉(zhuǎn)換成可支持功能邏輯驗(yàn)證的算法模型,明確算法的輸入和輸出條件,確定算法的邏輯思路。在實(shí)現(xiàn)算法建模的過(guò)程中梳理出算法的正確性依賴(lài)于核心算法的適應(yīng)場(chǎng)景是否與行業(yè)標(biāo)準(zhǔn)一致,算法的魯棒性取決于性能及邊界覆蓋度,算法的影響因素依賴(lài)于算法自身需要的各種標(biāo)定量,對(duì)于標(biāo)定量的取值影響算法的精準(zhǔn)度。
以交叉路口碰撞預(yù)警算法為例,在Simulink中建模思路:
(1)獲取主車(chē)和遠(yuǎn)車(chē)信息,計(jì)算兩車(chē)間距離,判斷距離是否大于閾值,若是則代表距離過(guò)遠(yuǎn)沒(méi)必要判斷;反之繼續(xù)。
(2)根據(jù)兩車(chē)位置坐標(biāo)計(jì)算兩車(chē)間的方位角,計(jì)算方位角以及遠(yuǎn)車(chē)航向角與主車(chē)航向角間的偏移量,根據(jù)方位角偏移量計(jì)算兩車(chē)距離在以主車(chē)行駛方向?yàn)閥軸正向的新坐標(biāo)系下的縱向、橫向距離分量,根據(jù)遠(yuǎn)車(chē)航向角偏移量計(jì)算遠(yuǎn)車(chē)速度在新坐標(biāo)系下的縱向、橫向速度分量。
(3)判斷橫向距離分量是否為0以及遠(yuǎn)車(chē)橫向速度分量是否與橫向距離分量同向。若是,則不存在碰撞情況,反之繼續(xù)。
(4)計(jì)算遠(yuǎn)車(chē)完成橫向位移所需的時(shí)間time1,計(jì)算time1時(shí)間內(nèi)遠(yuǎn)車(chē)完成的縱向位移,再加上之前的縱向距離分量,更新縱向距離。
(5)判斷縱向距離是否為0以,及遠(yuǎn)車(chē)縱向速度分量是否與縱向距離分量反向,若是,則不存在碰撞情況,反之繼續(xù)。
(6)計(jì)算主車(chē)完成縱向位移所需的時(shí)間time2,判斷time1與time2之間差值的絕對(duì)值是否小于閾值,若是,則發(fā)出碰撞預(yù)警,反之不預(yù)警。

圖3ICW算法建模
具體算法建模參見(jiàn)圖3,用于在算法仿真測(cè)試的環(huán)境中驗(yàn)證算法功能及按照算法評(píng)估模型對(duì)算法進(jìn)行多維度的評(píng)價(jià)和反饋。
4 算法評(píng)估模型
4.1 多維評(píng)估模型參數(shù)解析
算法的評(píng)價(jià)模型從大維度上分為算法計(jì)算效率和有效性。
算法的計(jì)算效率是指算法在編寫(xiě)完成,生成可執(zhí)行程序后,運(yùn)行時(shí)所需要消耗的資源,資源包括時(shí)間資源和內(nèi)存資源,即時(shí)間復(fù)雜度和空間復(fù)雜度,根據(jù)C-V2X應(yīng)用場(chǎng)景算法的資源使用情況,細(xì)分為表2所示的子項(xiàng)。

表2 算法計(jì)算效率評(píng)價(jià)參數(shù)
CPU占用率是指算法運(yùn)行時(shí)占用CPU資源的情況,占用率越高,說(shuō)明算法運(yùn)行效率較差,反之較好。占用率的高低與CPU強(qiáng)弱有直接關(guān)系,因此C-V2X應(yīng)用場(chǎng)景算法的評(píng)價(jià)需基于同一硬件平臺(tái)進(jìn)行。IO等待時(shí)間間接反映CPU占用情況,IO等待時(shí)間短,證明算法效率高,反之亦然。
內(nèi)存占用,即長(zhǎng)時(shí)間運(yùn)行內(nèi)存空間占用正常,無(wú)內(nèi)存泄漏式增長(zhǎng),空間占用不影響系統(tǒng)正常運(yùn)行,可表明算法設(shè)計(jì)及實(shí)現(xiàn)無(wú)缺陷。EMMC存儲(chǔ)占用,即存儲(chǔ)空間不能異常增長(zhǎng),不能影響系統(tǒng)正常運(yùn)行,有最大存儲(chǔ)限定。
算法有效性則分為正確性、魯棒性、場(chǎng)景影響因素。具體子項(xiàng)如表3所示。

表3 算法有效性評(píng)價(jià)參數(shù)
算法的有效性是從算法實(shí)現(xiàn)的功能角度分析,考慮所有可能影響算法結(jié)果的因素,從正常情況到邊界測(cè)試、壓力測(cè)試,再綜合車(chē)輛行駛過(guò)程中的環(huán)境及自身?xiàng)l件因素,合理評(píng)價(jià)算法模型的優(yōu)劣。
算法的優(yōu)劣直接影響C-V2X應(yīng)用場(chǎng)景實(shí)現(xiàn)的品質(zhì),場(chǎng)景的實(shí)現(xiàn)依托于輸入信息的準(zhǔn)確度、及時(shí)性以及算法的效率和處理信息的精準(zhǔn)度,因此設(shè)計(jì)算法評(píng)價(jià)模型目的就在于對(duì)每個(gè)算法有一個(gè)客觀的評(píng)價(jià)。
4.2 實(shí)例評(píng)估結(jié)果
以交叉路口碰撞預(yù)警算法為例,根據(jù)上述算法評(píng)價(jià)模型,按照標(biāo)準(zhǔn)測(cè)試數(shù)據(jù)、最大測(cè)試數(shù)據(jù)、最小測(cè)試數(shù)據(jù)進(jìn)行實(shí)際測(cè)試,測(cè)試結(jié)果如表4所示。

表4 算法各因子評(píng)價(jià)結(jié)果
綜合評(píng)價(jià)交叉路口碰撞預(yù)警算法的評(píng)價(jià)結(jié)果是通過(guò)。至此,可以驗(yàn)證算法的評(píng)估模型是有意義,并且可以執(zhí)行的。但在后續(xù)的工作中還需要更細(xì)化每個(gè)因子的權(quán)重,使算法評(píng)價(jià)模型能夠更準(zhǔn)確地評(píng)價(jià)每個(gè)應(yīng)用場(chǎng)景算法。
5 結(jié)束語(yǔ)
通過(guò)梳理C-V2X典型應(yīng)用場(chǎng)景,核心算法設(shè)計(jì),算法建模以及算法評(píng)價(jià)模型的研究,對(duì)C-V2X協(xié)同預(yù)警功能的設(shè)計(jì)、實(shí)現(xiàn)及評(píng)價(jià)形成完整的流程鏈條,推動(dòng)紅旗車(chē)型搭載自主C-V2X功能場(chǎng)景算法,為量產(chǎn)功能驗(yàn)證提供技術(shù)支撐。
C-V2X技術(shù)的發(fā)展逐步在向協(xié)同感知、協(xié)同控制方向發(fā)展,隨著參與車(chē)控的觸角越來(lái)越深入,需要算法在功能和性能上都更能適應(yīng)高速及城市道路交通中復(fù)雜及危險(xiǎn)的工況場(chǎng)景,因此就需要成體系的評(píng)價(jià)模型,能夠多維度對(duì)算法進(jìn)行評(píng)價(jià),保證算法的正確性及覆蓋率,繼而保證V2X功能的完備性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中國(guó)教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
中國(guó)工程咨詢(xún)(2015年2期)2015-02-14 02:59:26
俄羅斯問(wèn)題研究(2012年1期)2012-03-25 09:54:51