采用相鄰像素預(yù)測(cè)的可逆信息隱藏算法
2020-04-30 06:25:40李亞翔張顯全俞春強(qiáng)唐振軍
關(guān)鍵詞:信息
李亞翔, 張顯全,2,3, 俞春強(qiáng), 唐振軍,2
(1. 廣西師范大學(xué) 計(jì)算機(jī)科學(xué)與信息工程學(xué)院, 廣西 桂林 541004;2. 廣西師范大學(xué) 廣西多源信息挖掘與安全重點(diǎn)實(shí)驗(yàn)室, 廣西 桂林 541004;3. 桂林電子科技大學(xué) 廣西高校云計(jì)算與復(fù)雜系統(tǒng)重點(diǎn)實(shí)驗(yàn)室, 廣西 桂林 541004)
隨著互聯(lián)網(wǎng)的發(fā)展,保障信息安全的信息隱藏技術(shù)[1]日益受到研究者們的關(guān)注.信息隱藏技術(shù)在不影響載體文件正常使用的前提下,將秘密信息隱藏于載體文件中,具有隱秘通信、版權(quán)保護(hù)等功能.可逆信息隱藏技術(shù)(RDH)不僅能夠無損提取嵌入的秘密信息,還可以實(shí)現(xiàn)載體的無損恢復(fù).因此,RDH被廣泛地應(yīng)用于軍事、醫(yī)學(xué)、司法鑒定等領(lǐng)域.常見的可逆信息隱藏技術(shù)有基于無損壓縮算法、基于差值擴(kuò)展算法和基于直方圖平移算法.基于無損壓縮算法通過壓縮載體圖像的冗余信息騰出空間,實(shí)現(xiàn)秘密信息的嵌入[2-4].基于差值擴(kuò)展算法通過擴(kuò)展相鄰像素獲得空間,實(shí)現(xiàn)可逆信息的嵌入[5-6].基于直方圖平移算法對(duì)直方圖進(jìn)行移位,實(shí)現(xiàn)信息的可逆嵌入,該算法主要有基于原始像素直方圖平移、像素差值直方圖平移和預(yù)測(cè)誤差直方圖平移3類[7-10].文獻(xiàn)[11]采用圖像奇偶像素列交錯(cuò)預(yù)測(cè)方法提高像素的預(yù)測(cè)精度,進(jìn)一步提高嵌入容量和載密圖像的保真度.文獻(xiàn)[12]對(duì)每個(gè)像素相鄰的4個(gè)像素進(jìn)行預(yù)測(cè),其預(yù)測(cè)精度較文獻(xiàn)[11]有了進(jìn)一步提高.文獻(xiàn)[13]采用基于多元線性回歸預(yù)測(cè)方法,通過待預(yù)測(cè)像素3 px×5 px鄰域中的10個(gè)像素構(gòu)建多元線性回歸函數(shù)矩陣進(jìn)行預(yù)測(cè),但由于訓(xùn)練樣本像素方向及需學(xué)習(xí)的特征維度過多,且訓(xùn)練數(shù)據(jù)較少,出現(xiàn)過擬合問題,故預(yù)測(cè)效果不佳.文獻(xiàn)[14]采用固定權(quán)重的相鄰像素預(yù)測(cè)方法.
為了提高圖像信息隱藏算法的信息隱藏容量和載密圖像的保真度,本文提出一種采用相鄰像素預(yù)測(cè)的可逆信息隱藏算法.
1 基于局部線性的預(yù)測(cè)方法
1.1 多元線性回歸
多元線性回歸[15]通過已知數(shù)據(jù)找到一個(gè)線性方程來描述兩個(gè)及兩個(gè)以上的自變量與因變量之間的關(guān)系,并以此預(yù)測(cè)數(shù)據(jù).構(gòu)建多組線性映射方程,其矩陣形式為
Y=βX+ε.
(1)
多元線性回歸方程組求解采用最小二乘法,構(gòu)建函數(shù)F(β)=βX-Y2,當(dāng)sum(ε2i)(i=0,…,m)和F(β)取值最小時(shí),得到回歸系數(shù)β的值,實(shí)現(xiàn)對(duì)目標(biāo)變量的預(yù)測(cè).

圖1 像素選擇示意圖Fig.1 Schematic diagram of pixel selection
1.2 局部線性預(yù)測(cè)模型
自然圖像的局部像素間存在較強(qiáng)的相關(guān)性,故通過待預(yù)測(cè)像素的相鄰像素建立局部線性預(yù)測(cè)模型,運(yùn)用多元線性回歸方法確定預(yù)測(cè)模型的參數(shù),從而實(shí)現(xiàn)對(duì)待預(yù)測(cè)像素的預(yù)測(cè).像素選擇示意圖,如圖1所示.
設(shè)xm,n為待預(yù)測(cè)像素,3個(gè)相鄰像素為xm,n+1,xm+1,n,xm+1,n+1,則預(yù)測(cè)值x′m,n為
x′m,n=β0+β1xm,n+1+β2xm+1,n+β3xm+1,n+1.
(2)
式(2)中:β0~β3為4個(gè)未知參數(shù).
將xm,n+1,xm+1,n,xm+1,n+1作為目標(biāo)像素,分別建立線性方程組求解β0~β3.相鄰像素預(yù)測(cè)的像素選擇示意圖,如圖2所示.

(a) xm,n+1 (b) xm+1,n (c) xm+1,n+1 圖2 相鄰像素預(yù)測(cè)的像素選擇示意圖Fig.2 Schematic diagram of pixel selection for adjacent pixels prediction
目標(biāo)像素xm,n+1,xm+1,n,xm+1,n+1的方程組矩陣為
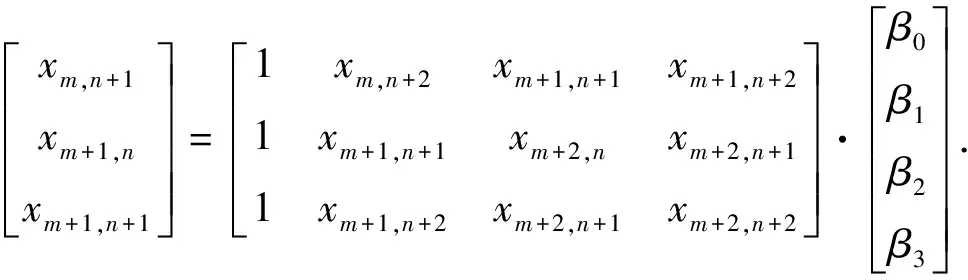
(3)
為了提高預(yù)測(cè)的準(zhǔn)確性并訓(xùn)練收斂速度,參數(shù)的計(jì)算應(yīng)與待預(yù)測(cè)像素xm,n高度相關(guān),因此,建立與待預(yù)測(cè)像素xm,n及目標(biāo)像素xm,n+1,xm+1,n,xm+1,n+1都相鄰的像素的線性方程組,以增加約束條件,減少預(yù)測(cè)誤差,有
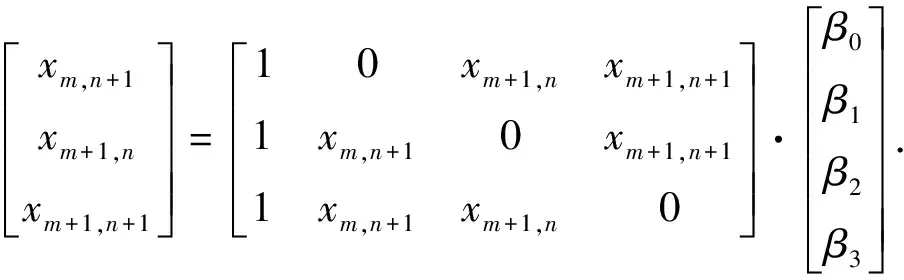
(4)
將式(3),(4)合并,可得
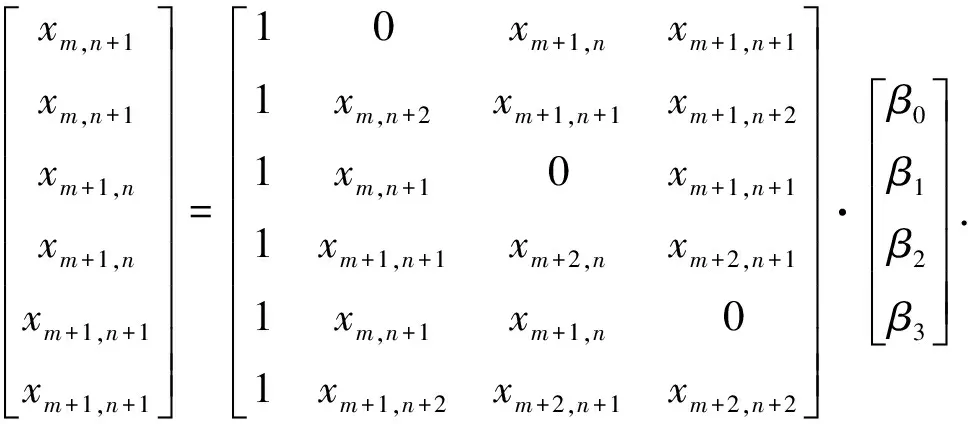
(5)
求解式(5)可得β0~β3,將其代入式(2),可得到局部線性預(yù)測(cè)模型.
2 基于局部線性預(yù)測(cè)模型的可逆信息隱藏算法
2.1 信息的隱藏
在局部線性預(yù)測(cè)模型的待預(yù)測(cè)像素區(qū)域中,為了保證像素預(yù)測(cè)的準(zhǔn)確性,圖像右側(cè)兩列和下端兩行的像素不進(jìn)行預(yù)測(cè)和隱藏信息,其余區(qū)域可作為預(yù)測(cè)區(qū)域.
在秘密信息嵌入的過程中,對(duì)預(yù)測(cè)區(qū)域依次由上到下,由左到右按行方式遍歷像素.通過預(yù)測(cè)模型對(duì)當(dāng)前像素xi,j進(jìn)行預(yù)測(cè),得到預(yù)測(cè)值x′i,j,預(yù)測(cè)誤差ei,j=xi,j-x′i,j,并繪制預(yù)測(cè)誤差直方圖.采用文獻(xiàn)[12]的隱藏方法,根據(jù)秘密信息量S選擇直方圖“0”值兩側(cè)的閾值Tl和Tr,將閾值對(duì)應(yīng)的直方圖兩側(cè)的像素進(jìn)行平移,并對(duì)載體像素進(jìn)行加減操作,從而將秘密信息嵌入載體圖像.

(6)
嵌入信息區(qū)域的像素依舊存在局部相關(guān)性,改變圖像遍歷方式,將上端和左側(cè)兩行作為保留區(qū)域,對(duì)預(yù)測(cè)區(qū)域依次由下到上,由右到左按行方式遍歷像素,并通過目標(biāo)像素左上角像素對(duì)其進(jìn)行預(yù)測(cè),實(shí)現(xiàn)圖像所有區(qū)域的信息嵌入.
通過上述操作,可實(shí)現(xiàn)秘密信息的可逆隱藏,得到載密圖像.
2.2 信息的提取與圖像的恢復(fù)
秘密信息的提取和載體圖像的恢復(fù)是嵌入過程的逆操作.最后兩行和最后兩列像素保持不變,通過由下到上,由右到左按行方式依次處理載密區(qū)域像素.首先,通過預(yù)測(cè)模型對(duì)當(dāng)前像素進(jìn)行預(yù)測(cè),得到x′i,j,ei,j.然后,通過ei,j,Tl,Tr提取秘密信息.
秘密信息s的提取過程為

(7)
原始圖像像素xi,j為
(8)
因此,通過式(7),(8)可以無損恢復(fù)載體圖像和提取秘密信息.
3 實(shí)驗(yàn)結(jié)果與分析
3.1 評(píng)價(jià)指標(biāo)
從BOWS-2標(biāo)準(zhǔn)圖像庫中選取4幅512 px×512 px的灰度圖像Airplane,Baboon,Lena和Sailboat作為實(shí)驗(yàn)測(cè)試圖像,如圖3所示.
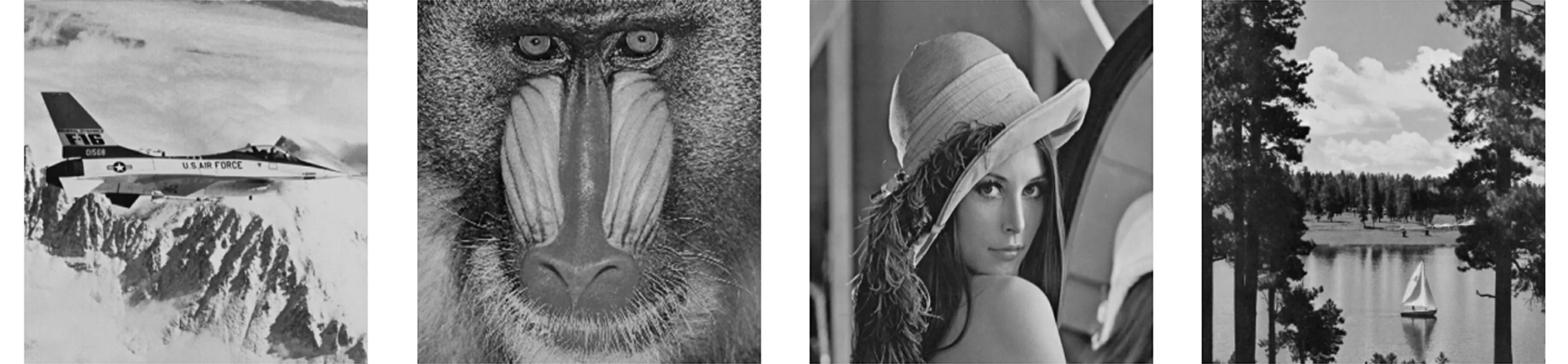
(a) Airplane (b) Baboon (c) Lena (d) Sailboat 圖3 實(shí)驗(yàn)測(cè)試圖像Fig.3 Experimental test images
通過預(yù)測(cè)誤差直方圖在“0”值附近的高度(預(yù)測(cè)誤差的個(gè)數(shù))驗(yàn)證文中算法的預(yù)測(cè)效果.“0”值像素越多,表明預(yù)測(cè)精度越高;反之,則預(yù)測(cè)精度越低.
此外,采用峰值信噪比(PSNR)作為評(píng)價(jià)圖像信息嵌入容量和保真度的指標(biāo).峰值信噪比越大,則圖像的信息嵌入容量越大,保真度越高,失真越小;峰值信噪比越小,則圖像的信息嵌入容量越小,保真度越低,失真越大.
峰值信噪比的計(jì)算公式為
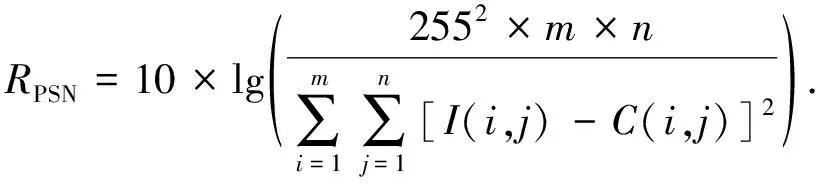
(9)
式(9)中:RPSN表示峰值信噪比;I(i,j),C(i,j)分別為原始圖像和載密圖像對(duì)應(yīng)點(diǎn)的像素坐標(biāo)值;m,n分別為圖像的寬和高.
3.2 結(jié)果與分析
對(duì)測(cè)試圖像預(yù)測(cè)區(qū)域由上到下,由左到右依次遍歷像素,并通過式(2)計(jì)算預(yù)測(cè)值.為保證嵌入信息的正確提取,圖像進(jìn)行信息隱藏的實(shí)際像素區(qū)域?yàn)?10 px×510 px.
測(cè)試圖像的預(yù)測(cè)誤差直方圖,如圖4所示.圖4中:e為預(yù)測(cè)誤差;N為預(yù)測(cè)誤差的數(shù)量.由圖4可知:預(yù)測(cè)誤差直方圖呈正態(tài)分布,中間高,兩端逐漸下降;在峰值點(diǎn)“0”處,相較于紋理區(qū)域的圖像(Baboon),文中算法對(duì)平滑區(qū)域圖像(Airplane)的預(yù)測(cè)效果更好.這是因?yàn)榧y理區(qū)域局部像素相關(guān)性較弱,相鄰像素點(diǎn)間的像素值變化較大,不一定呈線性關(guān)系,導(dǎo)致根據(jù)相鄰像素預(yù)測(cè)的局部特征相對(duì)實(shí)際特征有一定偏差;而平滑區(qū)域局部像素相關(guān)性較強(qiáng),相鄰像素點(diǎn)間的像素值變化較小,預(yù)測(cè)偏差較小.
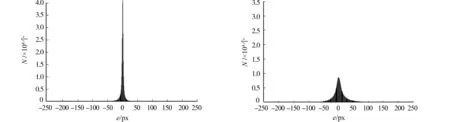
(a) Airplane (b) Baboon
(c) Lena (d) Sailboat圖4 測(cè)試圖像的預(yù)測(cè)誤差直方圖Fig.4 Prediction error histogram of test images
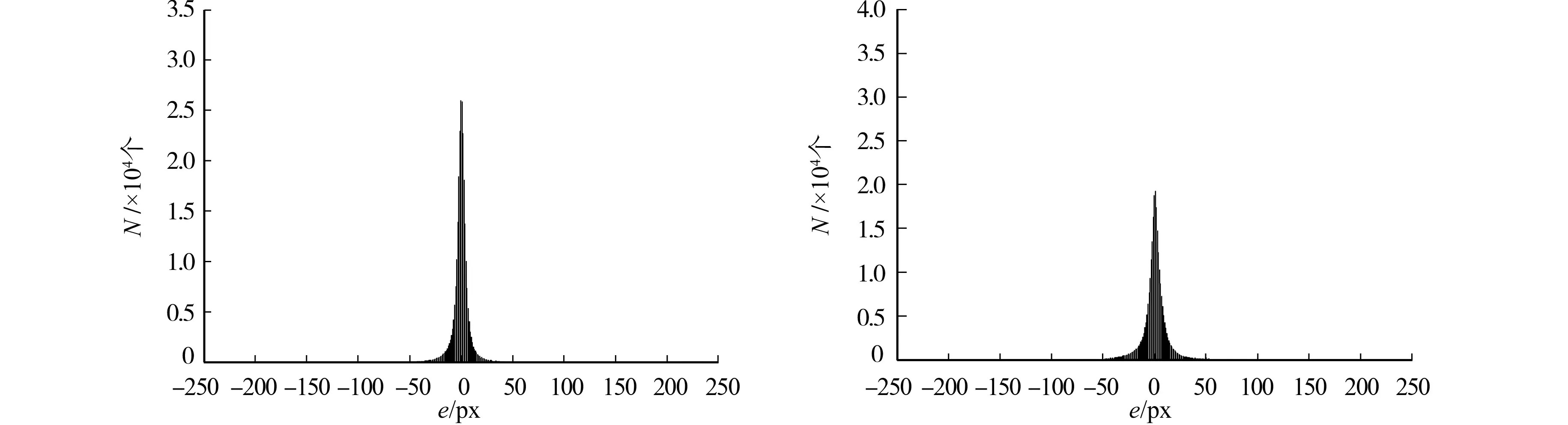
為了確定文中算法的預(yù)測(cè)效果,在[-10,10] px的預(yù)測(cè)誤差區(qū)間內(nèi),將文獻(xiàn)[10]算法、文獻(xiàn)[13]算法與文中算法進(jìn)行比較.不同算法的預(yù)測(cè)誤差對(duì)比,如圖5所示.由圖5可知:相較于文獻(xiàn)[10]算法和文獻(xiàn)[13]算法,文中算法的預(yù)測(cè)精度皆有所提高.
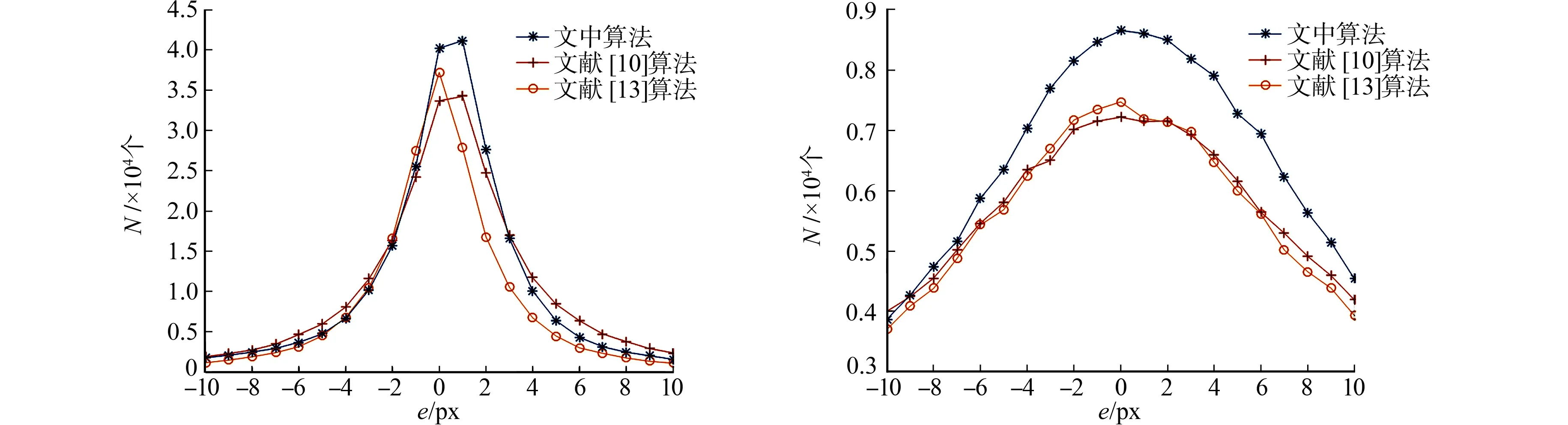
(a) Airplane (b) Baboon
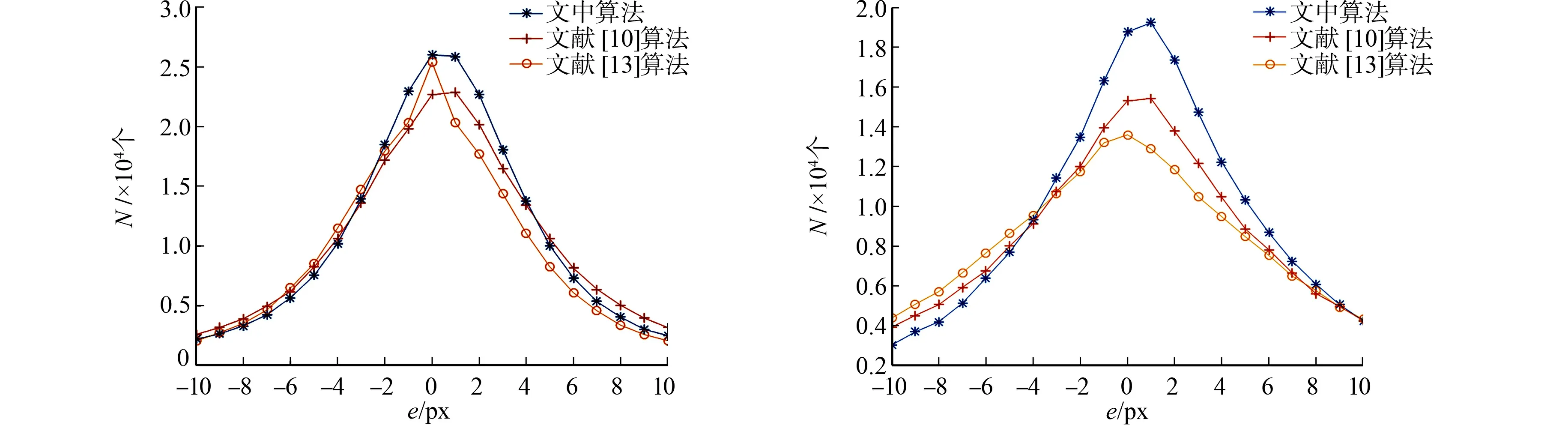
(c) Lena (d) Sailboat 圖5 不同算法的預(yù)測(cè)誤差對(duì)比Fig.5 Comparison of prediction errors of different algorithms
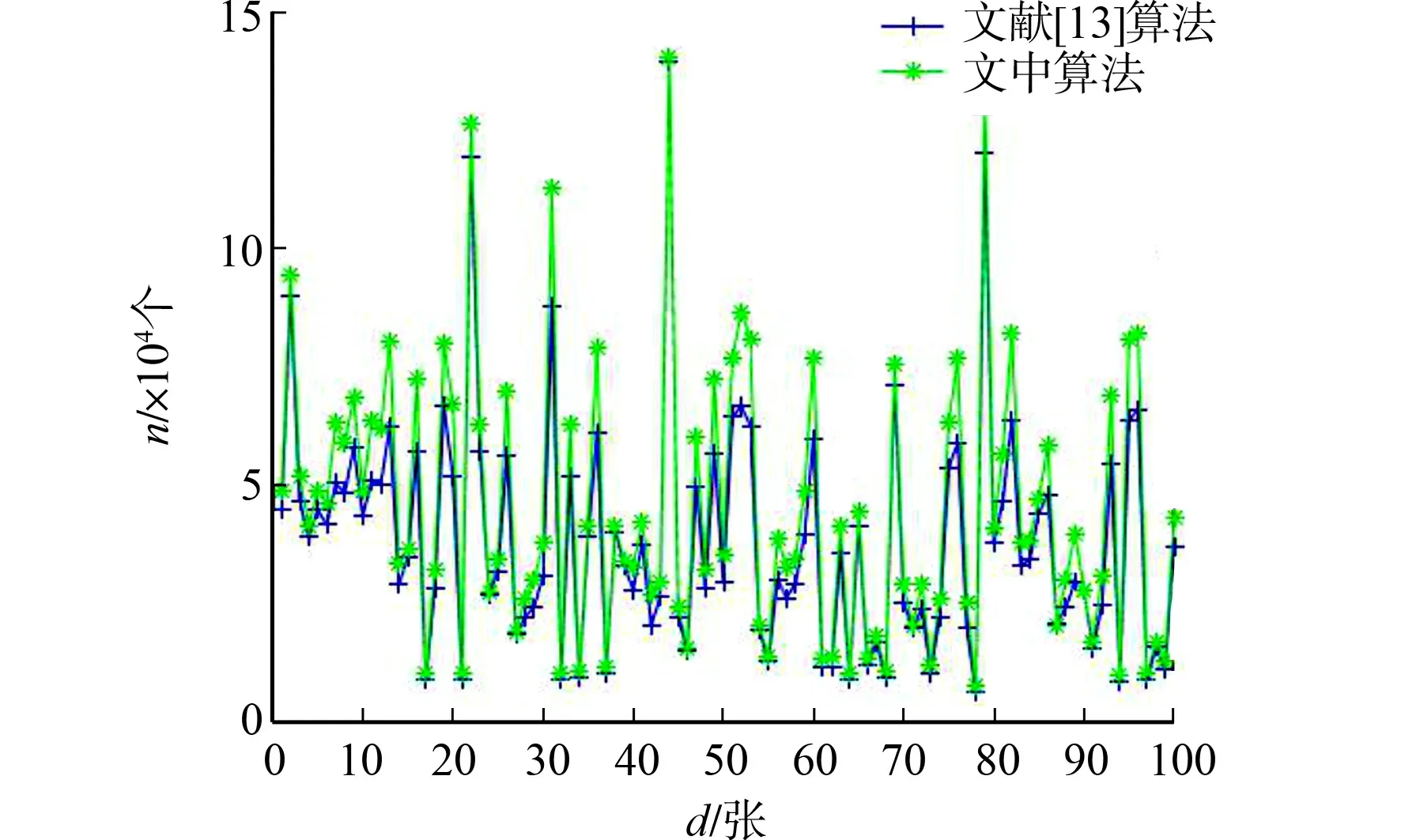
圖6 不同算法的預(yù)測(cè)誤差直方圖的峰值對(duì)比Fig.6 Comparison of peak value of predictionerror histogram in different algorithms
為進(jìn)一步對(duì)比預(yù)測(cè)算法效果的一般性,從BOWS-2標(biāo)準(zhǔn)圖像庫中隨機(jī)選取100幅圖像作為測(cè)試樣本,將文中算法與文獻(xiàn)[13]算法進(jìn)行比較.不同算法的預(yù)測(cè)誤差直方圖的峰值對(duì)比,如圖6所示.圖6中:n為峰值點(diǎn)的個(gè)數(shù);d為圖片數(shù)量.由圖6可知:相較于文獻(xiàn)[13]算法,文中算法有較高的預(yù)測(cè)精度,且具有一般性.
為了進(jìn)一步驗(yàn)證信息嵌入容量和圖像的保真度,將文獻(xiàn)[10]算法、文獻(xiàn)[13]算法和文中算法的峰值信噪比進(jìn)行比較.根據(jù)嵌入信息容量S自適應(yīng)選擇直方圖的平移位并向外側(cè)移一位,騰出嵌入位以實(shí)現(xiàn)可逆嵌入.不同算法的峰值信噪比的對(duì)比,如圖7所示.由圖7可知:嵌入秘密信息量越大,載密圖像的峰值信噪比越小;在信息嵌入容量一定的情況下,文中算法的峰值信噪比大于文獻(xiàn)[10]算法和文獻(xiàn)[13]算法.
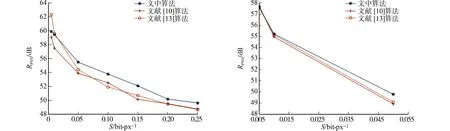
(a) Airplane (b) Baboon
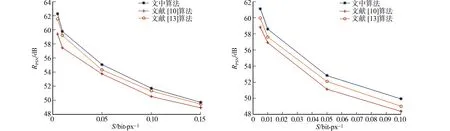
(c) Lena (d) Sailboat 圖7 不同算法的峰值信噪比的對(duì)比Fig.7 Comparison of peak signal-to-noise ratio in different algorithms
實(shí)驗(yàn)結(jié)果表明,文中算法不僅能提高信息嵌入容量,還能提高載密圖像的保真度.因此,文中算法可以提高預(yù)測(cè)精度,降低載密圖像的失真度,從而有效地提升圖像可逆信息隱藏的能力.
4 結(jié)束語
提出一種局部線性預(yù)測(cè)模型對(duì)待預(yù)測(cè)像素進(jìn)行預(yù)測(cè),經(jīng)預(yù)測(cè)誤差直方圖的平移實(shí)現(xiàn)可逆信息隱藏.通過該預(yù)測(cè)模型可以確定線性預(yù)測(cè)關(guān)系,提升預(yù)測(cè)算法的預(yù)測(cè)精度,提高可逆信息的嵌入能力.在相同嵌入容量的情況下,文中算法比文獻(xiàn)[10]算法、文獻(xiàn)[13]算法具有更高的圖像保真度.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32