表面肌電信號人機接口技術研究
2020-04-27 03:57:08侯秀麗
科學技術創新 2020年7期
關鍵詞:動作
侯秀麗
(安徽商貿職業技術學院電子信息工程系,安徽 蕪湖241002)
表面肌電信號(surface Electromyosignal,sEMG)記錄了肌肉自主收縮時由肌肉纖維產生的電生理活動信息。可通過表面電極拾取,因此稱為表面肌電信號,它主要是淺層肌肉和神經干上電活動的綜合效應[1]。由于使用表面電極采集很方便,可避免針電極采集信號時插入人體肌肉造成創傷,不會給被試帶來不愉快的體驗,而且進行信號采集時不需要醫務人員在場,對場地沒有特別要求,方便實施,因此近年來表面肌電信號得到了廣泛應用,如在康復醫學及競技體育等多領域。
1 人體肌電信號產生的生理學機理
廣義的肌電信號泛指人體肌肉電信號,根據解剖醫學知識可知,骨骼肌作為人體三種肌肉中很重要的一種,與另外兩種(平滑肌和心肌)相比,它廣泛參與肌體運動,受神經沖動或抑制支配時收縮幅度更明顯,是表面肌電信號研究的主要對象。因為人體肌體的各項運動一般都需要在神經系統支配下,骨骼肌各塊肌肉相互配合將興奮(收縮)作用于骨骼,進而使人體產生各種協調運動,此時肌細胞內就會出現電位高低的變化,該電位就是肌電信號。
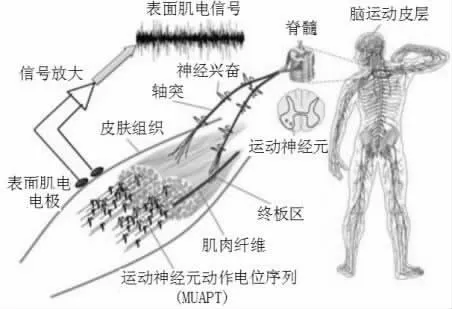
圖1 肌電信號產生機理示意圖
如圖1 所示,在中樞神經系統控制下,人體脊髓中的運動神經元產生的電脈沖沿軸突傳導到肌纖維,導致大量肌纖維收縮產生肌肉力。其實質是肌纖維的動作電位傳播引起的肌肉收縮,該動作電位信號傳播過程中在人體軟組織中建立起電場,能夠在檢測電極間表現出電勢的高低,各肌纖維在檢測點引起電位的總和構成運動單元的動作電位(Motor Unit Action Motion,MUAP),使用市面上常見的表面電極即可收集骨骼肌動作產生的不同肌電信號。
2 表面肌電信號的特點與應用領域
2.1 表面肌電信號的非平穩性分析
由前面分析可知,肌電信號是由MUAP 產生的,MUAP 內所有肌纖維產生的肌電信號基本相似。一塊肌肉興奮越強,其參與收縮的運動單位數目越多。同一塊肌肉不同位置的MUAP 對應的肌電信號傳到皮膚表面所走的路徑不一樣,所需時間就不相同,因此,在信號采集處獲得的相位和幅值就不一樣。這些信號的無序疊加造成了sEMG 的非平穩性。此外,完成一個動作通常要原動肌及固定肌等多塊肌肉得協同動作,不同肌肉在協同動作時都將對sEMG 產生影響,進一步加劇了肌電信號的非平穩性。
表面肌電信號作為眾多肌纖維中MUAP 的疊加,能在一定程度上有效反映人體神經、肌肉功能和狀態。不管是使用濕的還是干的表面電極,其采集到的sEMG 特征可概括如下:

表1 表面肌電信號主要特征
2.2 表面肌電信號應用領域
盡管表面肌電信號很微弱,且具有非常強的非平穩性,采集時與貼片電極所放的具體位置、被試者皮下脂肪厚度、體表溫度的變化等因素都有關系,容易受到干擾等,但因其能較好地反映神經肌肉功能與狀態,采集無創性、便捷操作等,在基礎醫學研究、臨床診斷、康復醫學等領域都得到了廣泛應用。例如在臨床醫學中用于人體神經或者肌肉相關疾病的判斷、在人機工效學領域用做肌肉工作的工效學分析,在康復醫學領域的肌肉功能評價以及在競技體育科學中的疲勞判定、運動技術合理性分析、肌纖維類型和無氧閾值的無損傷性預測等方面都有著十分重要的應用價值[2]。國內外不少學者都展開了相關研究,一般醫療機構通常使用肌電圖儀采集人體肌電信號,根據肌電信號波形不同,做趨勢分析,判斷肌肉損傷,進行某些疾病如帕金森病的輔助診斷等。科研院所的研究學者大多使用表面電極來采集肌電信號,針對不同應用背景做相應的模式分類,探索用于不同實踐。
由第一部分分析可知,在肌肉收縮前就已產生肌電信號,因此肌電信號超前于肌肉力。肌肉發力是通過肌肉收縮產生的,而肌電信號在肌肉收縮前就已經可以檢測到了。所以可通過開發肌電信號檢測與控制裝置,在肌肉動作尚未完成時就拾取肌電信號,經過計算機高速處理用于人機接口,能夠明顯提高人機接口的交互速度,有助于在軍事戰斗或競技體育中先發制人,如飛行員控制戰斗機和敵人進行空中軍事格斗,F1 賽車手控制方程式賽車在復雜路況下快速行駛)等在需要增強控制靈活性和響應快速性的場合具有巨大的應用前景。
3 表面肌電信號的采集與處理
3.1 表面肌電信號采集實驗
由于肌電信號的主要特征是非平穩的隨機過程,考慮到實際應用中的工頻干擾情況,項目組成員合作設計了一套嵌入式的肌電信號采集儀,該系統是在筆者攻讀碩士期間所在的實驗室成員自行研制的肌電信號采集系統基礎上,又進一步完善,經過多次調整最后完成的。在進行信號采集時,首先用酒精棉擦拭被試者前臂皮膚,固定好Ag-AgCl 貼片電極,要求被試端坐在舒適的椅子上,采取舒展的上身姿勢,手臂自然放松,調整前臂狀態,使其不做動作時,通過儀器面板觀察不到與動作相關的活動電信號。然后按照采集實驗要求,進行幾次練習后,指導被試熟悉具體要求,再完成指定的幾個手臂動作,每個動作完成若干次,時間間隔設置為1 秒鐘,采樣頻率設置為1000 赫茲,通過數據采集系統記錄下這些被試者進行上肢動作時的肌電信號原始數據,保存到指定位置。可以根據采集實驗日期,分別建立數據目錄,同時記錄被試者基本信息(如年齡段、性別等),方便后續進一步分析。
需要注意的是,在被試完成不同動作時,實驗操作人員要盡量保證貼片電極的位置穩定,在黏貼時就要固定好,以免電極移動或者脫落,導致采集到的數據無效情況。
3.2 表面肌電信號處理過程
通過上面的采集實驗,使用銀- 氯化銀表面電極獲得到的大量人體上臂動作的表面肌電信號通常很微弱,一般不超過5毫伏,有些甚至是微伏級的,而且里面混雜有噪聲干擾。需要進行濾波,然后才能提取時頻域的特征,信號處理流程如下:

圖2 表面肌電信號處理
如圖2 所示,首先采用高精密儀用放大器,設計多級放大電路提高信號幅值。又由于干擾源多樣性,必須通過多種方式來降低噪聲,詳見參考文獻2。只有濾除噪聲干擾,才能提取信號有用特征,為此筆者設計了巴特沃斯濾波器,經過多次實驗調整,可以較好地濾除干擾,又不損失太多有用的肌電信號,為后續特征提取與動作模式識別奠定了基礎。
4 表面肌電信號人接接口應用
人機接口是人和機器之間進行信息交互的一種裝置。由于肌肉電信號中包含了人體動作力度、位置等豐富信息,使得建立基于肌電信號的人機接口成為可能。假肢作為人機接口中的一種,對于手臂截肢患者至關重要,通過穿戴假肢能幫助其恢復一定的手部功能。最初的假肢只是裝飾性的或者僅具有簡單功能[3]。經過不斷發展,目前出現的新型肌電控制假肢具有很多傳統假肢不具備的優點,如可以量身定制、結構簡單、動作自如、操作方便等,越來越獲得廣泛應用。
使用肌電信號控制的假肢,實物如圖3 所示,該假肢有三個手指,拇指、食指和中指,用一個微型電機帶動減速機構完成驅動,假手后端連接的筒壁用高性能樹脂材料制作,輕薄有韌性,方便套在殘臂上。手指前端可以套上乳膠手套,外表逼真,具備仿生功能。能根據殘疾人神經以及上肢殘臂的肌肉動作去控制假手的張開、合攏,完成相應的抓取與放開等基本動作。該肌電假手可以根據殘疾患者的實際情況定制手臂的粗細、長短等,手指也可以設計,使其穿戴更加合身,工作可靠,為他們日常行動帶來很多便利,顯著提高其生活質量。

圖3 肌電信號控制的假肢實物圖
為了能夠控制肌電假肢精準反映使用者意圖,實現多自由度靈巧操作。還需要通過大量試驗,采集更多不同被試者前臂、手腕部、甚至是手指精細動作對應的肌電信號,并且綜合運用多種信號分析方法如小波分析、主成分分析等,合理提取特征參數,設計先進的分類器,通過大量學習訓練,最終做出準確模式分類,用于驅動假肢精準完成不同動作,進一步提高使用者生活質量。
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27
