基于圖像與點(diǎn)云的三維障礙物檢測
2020-04-24 08:56:32張耀威卞春江陳紅珍
計(jì)算機(jī)工程與設(shè)計(jì) 2020年4期
張耀威,卞春江,周 海+,陳紅珍
(1.中國科學(xué)院國家空間科學(xué)中心 復(fù)雜航天系統(tǒng)綜合電子與信息技術(shù)重點(diǎn)實(shí)驗(yàn)室,北京 100190;2.中國科學(xué)院大學(xué) 計(jì)算機(jī)科學(xué)與技術(shù)學(xué)院,北京 100049)
0 引 言
近幾年來,伴隨著人工智能技術(shù)的不斷發(fā)展,智能機(jī)器人具備了更多的功能,包括:環(huán)境監(jiān)測、巡邏安檢、導(dǎo)航、自主灌溉等等,越來越多的機(jī)器人應(yīng)用于室外場景。因此室外機(jī)器人的感知能力對于其應(yīng)用起著至關(guān)重要的作用。本文立足于室外輪式機(jī)器人的應(yīng)用,改進(jìn)了一種三維障礙物檢測的方法,提升了其檢測精度。
在傳統(tǒng)的檢測方法中,謝德勝等[1]使用了模板匹配的方法進(jìn)行障礙物檢測,王海等[2]使用了聚類的方法進(jìn)行障礙物檢測。近幾年來,基于圖像的檢測技術(shù)已經(jīng)非常的成熟了,有經(jīng)典的Faster Rcnn[3,4]系列,Yolo[5-7]系列和SSD[8]系列等,其在圖像檢測領(lǐng)域已經(jīng)達(dá)到了非常高的水平,如陸峰等[9,10]是用了Faster Rcnn在雷達(dá)數(shù)據(jù)的俯視圖進(jìn)行障礙物的檢測。
一般地,帶有三維信息的數(shù)據(jù)輸入有深度圖像和雷達(dá)點(diǎn)云兩種。通過雙目視覺獲取的深度圖像有著距離短、夜晚效果差的缺點(diǎn),所以大部分室外場景的實(shí)驗(yàn)和應(yīng)用都使用雷達(dá)點(diǎn)云作為輸入。近兩年來,有許多針對點(diǎn)云數(shù)據(jù)處理的方法,如使用體素的VoxelNet[11],使用多角度的Multi-view 3D[12],針對點(diǎn)云整體處理的Pointnet[13]等。其中Frustum PointNets[14](平截頭點(diǎn)云網(wǎng)絡(luò))利用二維檢測鎖定目標(biāo),再提取點(diǎn)云并使用Pointnet進(jìn)行三維點(diǎn)云檢測,提高了Pointnet的檢測效率。本文基于平截頭點(diǎn)云網(wǎng)絡(luò)的架構(gòu),提出了一種擴(kuò)張平截頭點(diǎn)云的三維障礙物檢測方法。該方法對其二維網(wǎng)絡(luò)和三維網(wǎng)絡(luò)之間結(jié)合的部分進(jìn)行改進(jìn),加入了擴(kuò)張包圍框,提高了三維檢測的精度。
1 正 文
本文基于平截頭點(diǎn)云網(wǎng)絡(luò),加入了二維包圍框擴(kuò)張,提出了一種擴(kuò)張平截頭點(diǎn)云檢測的方法。該方法使用了圖像和雷達(dá)點(diǎn)云數(shù)據(jù),完成了室外街道場景中障礙物的三維檢測和識別,提高了障礙物檢測的精度。
該方法首先使用了Yolov3在圖像中進(jìn)行了障礙物的檢測與識別;然后對得到的二維包圍框進(jìn)行擴(kuò)張,利用擴(kuò)張后的二維包圍框提取雷達(dá)數(shù)據(jù)中對應(yīng)的點(diǎn)云;最后利用改進(jìn)的Pointnet對該點(diǎn)云進(jìn)行計(jì)算,得到對應(yīng)點(diǎn)云的三維坐標(biāo)。對于障礙物識別,使用圖像分類的類別作為識別結(jié)果。本文使用的方法構(gòu)架如圖1所示。
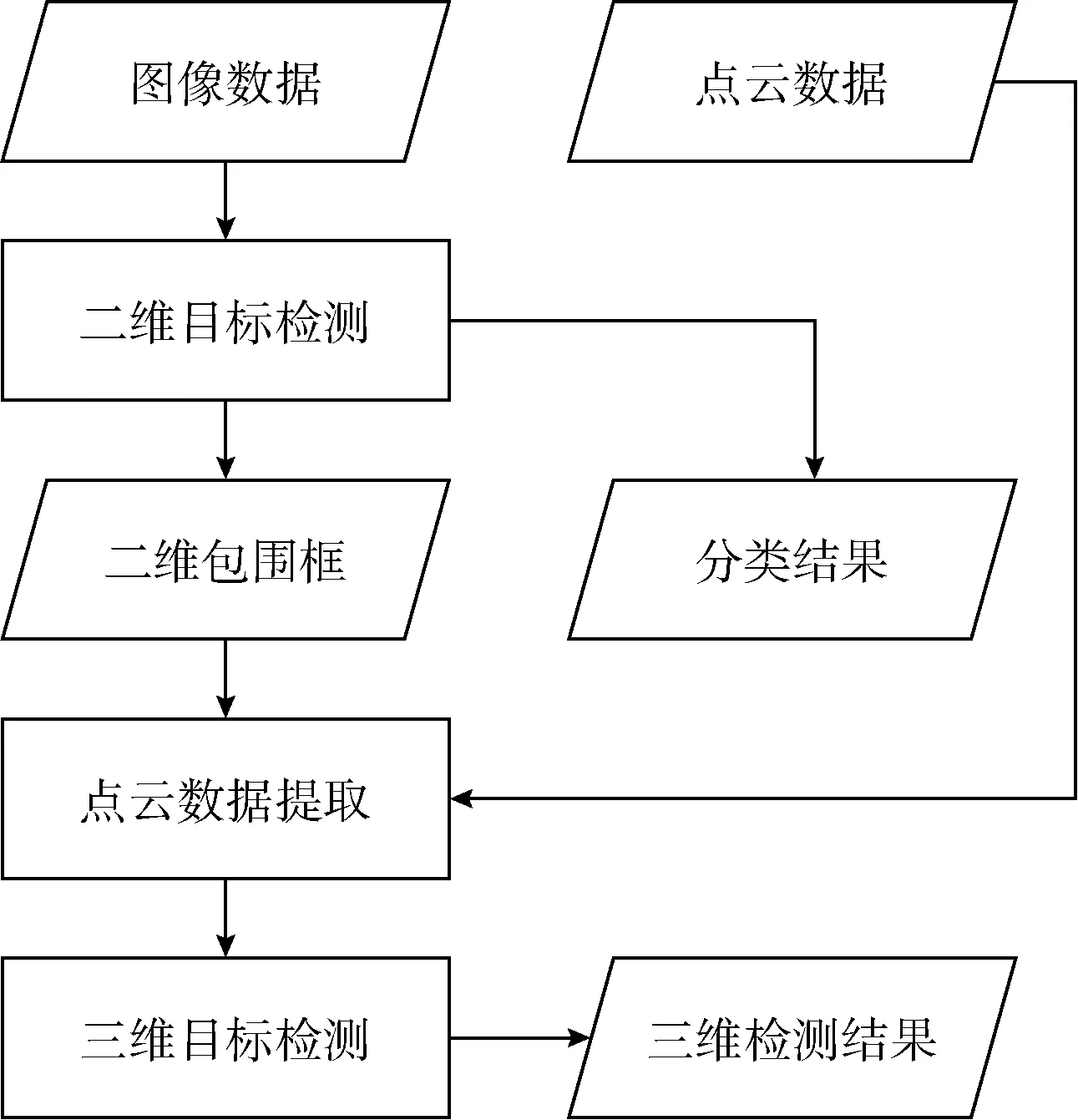
圖1 擴(kuò)張平截頭點(diǎn)云檢測方法架構(gòu)
1.1 二維目標(biāo)檢測
本文借鑒平截頭點(diǎn)云網(wǎng)絡(luò)的結(jié)構(gòu),實(shí)現(xiàn)室外街道場景中障礙物的檢測和識別,整個(gè)架構(gòu)的開始依賴于二維目標(biāo)檢測的結(jié)果,因此首先使用二維目標(biāo)檢測網(wǎng)絡(luò)對障礙物進(jìn)行檢測。
目前主流的目標(biāo)檢測網(wǎng)絡(luò)有兩個(gè)階段類型的Faster Rcnn系列和一個(gè)階段類型的Yolo、SSD系列。其中Yolov3使用多個(gè)尺度融合進(jìn)行了檢測,對小目標(biāo)的檢測結(jié)果提升,網(wǎng)絡(luò)結(jié)構(gòu)簡單,檢測速度也比較快。
二維包圍框的好壞會影響后續(xù)檢測的效果。與其它的二維目標(biāo)檢測網(wǎng)絡(luò)相比較,Yolov3在COCO(common objects in context)數(shù)據(jù)集中的檢測效果更好,與其它方法對比的結(jié)果見表1[7]。

表1 二維檢測網(wǎng)絡(luò)性能對比
由表1可以看出Yolov3的性能從檢測精度和檢測時(shí)間來說,相對更好,因此本文使用Yolov3進(jìn)行障礙物檢測,提取障礙物二維包圍框和分類置信度。
1.2 點(diǎn)云提取
圖像數(shù)據(jù)和雷達(dá)數(shù)據(jù)是不同維度的數(shù)據(jù),在利用圖像數(shù)據(jù)提取雷達(dá)數(shù)據(jù)的時(shí)候,需要對圖像數(shù)據(jù)和雷達(dá)數(shù)據(jù)進(jìn)行關(guān)聯(lián)。利用數(shù)據(jù)集提供的投影矩陣,可以完成圖像二維數(shù)據(jù)與雷達(dá)三維數(shù)據(jù)之間的相互轉(zhuǎn)換。
在KITTI[15]數(shù)據(jù)集的標(biāo)定文件中包含了轉(zhuǎn)換的矩陣P,通過矩陣P可以將雷達(dá)數(shù)據(jù)投影到對應(yīng)的圖像平面當(dāng)中。
空間三維點(diǎn)的坐標(biāo)可以表示為
X=(x,y,z,1)T
(1)
投影矩陣可以表示為
(2)
其中,i為第i個(gè)相機(jī)編號;
圖像與雷達(dá)數(shù)據(jù)的轉(zhuǎn)換為
(3)
其中,輸出的Y為投影到了二維相機(jī)坐標(biāo)系中的坐標(biāo)。
根據(jù)檢測得到的二維包圍框提取投影后對應(yīng)的點(diǎn)云數(shù)據(jù),因此二維包圍框的好壞直接影響到了后續(xù)點(diǎn)云檢測網(wǎng)絡(luò)的性能。二維包圍框過小造成提取出的點(diǎn)云不足,會影響三維檢測網(wǎng)絡(luò)的檢測邊界范圍;二維包圍框過大造成提取雜點(diǎn)過多,會導(dǎo)致三維檢測位置大小信息不準(zhǔn)。根據(jù)目前目標(biāo)檢測理論方法的成果,二維檢測框檢測的結(jié)果已經(jīng)達(dá)到了比較好的水平,再進(jìn)一步大幅度提高難度比較大,因此,可以在二維目標(biāo)檢測框和三維點(diǎn)云提取的銜接部分進(jìn)行改進(jìn)。通過擴(kuò)張二維檢測框,可以有效提高點(diǎn)云提取的召回率,避免障礙物點(diǎn)云信息丟失,增加了三維檢測數(shù)據(jù)輸入的完整性,進(jìn)而提升三維檢測效果。本文加入對二維包圍框的擴(kuò)張,利用擴(kuò)張后的二維包圍框?qū)c(diǎn)云數(shù)據(jù)進(jìn)行提取。檢測包圍框的擴(kuò)張如圖2所示。
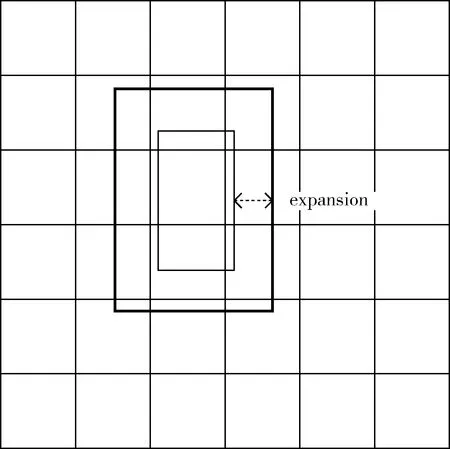
圖2 二維包圍框的擴(kuò)張
利用投影矩陣將點(diǎn)云數(shù)據(jù)投影到平面,通過圖像大小對雷達(dá)數(shù)據(jù)進(jìn)行第一次裁剪,再通過二維包圍框?qū)c(diǎn)云進(jìn)行第二次裁剪,將裁剪后剩余的點(diǎn)云的數(shù)據(jù)提取出來,完成了點(diǎn)云數(shù)據(jù)的提取。
1.3 三維目標(biāo)檢測
對于三維目標(biāo)檢測,本文借助點(diǎn)云網(wǎng)絡(luò)的結(jié)構(gòu),對其
進(jìn)行改進(jìn),因此使用基本網(wǎng)絡(luò)結(jié)構(gòu)為Pointnet。Pointnet的兩個(gè)基本結(jié)構(gòu)是轉(zhuǎn)換網(wǎng)絡(luò)與最大池化,使用轉(zhuǎn)換網(wǎng)絡(luò)可以使點(diǎn)云進(jìn)行旋轉(zhuǎn),使用最大池化可以對升維之后點(diǎn)進(jìn)行特征篩選,解決了點(diǎn)云輸入無序性的問題。
針對Pointnet的網(wǎng)絡(luò)結(jié)構(gòu)進(jìn)行改進(jìn),使其可以輸出點(diǎn)云的三維位置,使用一個(gè)7維度的向量來表示點(diǎn)云的位置和大小,即 [x,y,z,l,w,h,θ], 分別表示點(diǎn)云的中心坐標(biāo)、長寬高以及在俯視圖平面相對于正方向的轉(zhuǎn)角θ。 其中在網(wǎng)絡(luò)訓(xùn)練的過程當(dāng)中需要對檢測點(diǎn)云進(jìn)行旋轉(zhuǎn)平移的歸一化處理,因此需要使用到轉(zhuǎn)換網(wǎng)絡(luò)的結(jié)構(gòu)。
改進(jìn)網(wǎng)絡(luò)結(jié)構(gòu)的輸入是提取獲得的點(diǎn)云數(shù)據(jù),輸出是檢測的三維結(jié)果。其中轉(zhuǎn)換網(wǎng)絡(luò)生成的是一個(gè)同點(diǎn)云維度相同的變換矩陣。
改進(jìn)的Pointnet網(wǎng)絡(luò)結(jié)構(gòu)如圖3上部分所示。輸入為 [n×3] 的點(diǎn)云,每個(gè)點(diǎn)云的使用三維度的 [x,y,z] 空間點(diǎn)表示,經(jīng)過一個(gè)轉(zhuǎn)換網(wǎng)絡(luò),對點(diǎn)進(jìn)行變換處理;通過多層感知機(jī)將每個(gè)點(diǎn)的維度提升到64;再經(jīng)過相同的操作將點(diǎn)的維度信息提升到1024;經(jīng)過最大池化,提取出顯著特征,最后經(jīng)過多層感知機(jī)將輸出維度改變?yōu)?維度。
其中轉(zhuǎn)換操作的具體過程如圖3的下半部分所示,原始數(shù)據(jù)經(jīng)過多層感知機(jī)將維度提升到1024,在經(jīng)過極大池化,最后通過多層感知機(jī)將維度改變到256維度;將得到的輸出與 [256×9] 維度的參數(shù)進(jìn)行矩陣相乘,得到9維度的向量,即 [3×3] 的轉(zhuǎn)換矩陣。
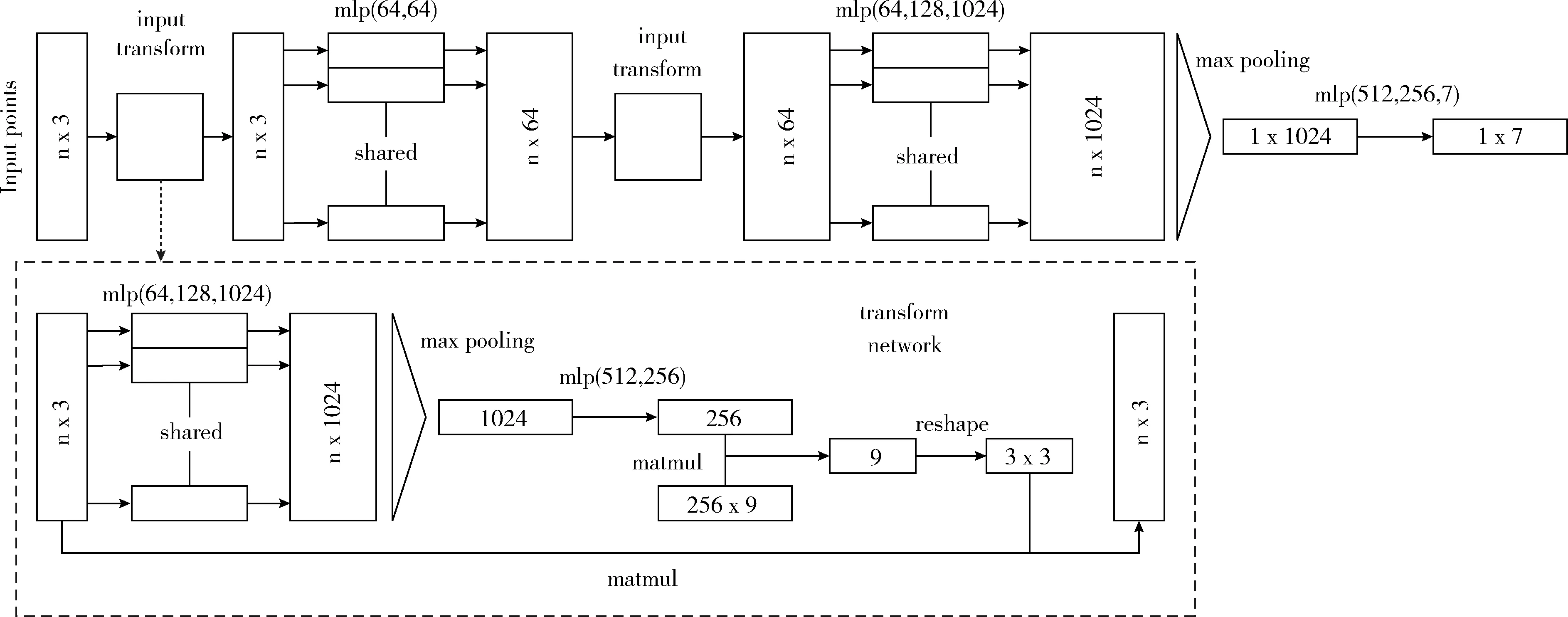
圖3 改進(jìn)的Pointnet網(wǎng)絡(luò)結(jié)構(gòu)
使用二維圖像分類的結(jié)果作為最終的分類結(jié)果,使用點(diǎn)云檢測的結(jié)果作為障礙物檢測位置和大小的結(jié)果。
2 實(shí)驗(yàn)分析
實(shí)驗(yàn)使用KITTI數(shù)據(jù)集,數(shù)據(jù)集包括了8個(gè)類別,分別是:car,van,truck,pedestrian,person sitting,cyclist,tram,others。室外街道場景中最常見的運(yùn)動(dòng)障礙物為人、車和自行車,為了簡化數(shù)據(jù)集,對數(shù)據(jù)集進(jìn)行預(yù)處理,將類別重新劃分成3類:car(包括了car、van、truck、tram),pedestrian(包括了pedestrian、person sitting),cyclist。因?yàn)闇y試數(shù)據(jù)沒有標(biāo)簽,無法進(jìn)行測評,因此重新劃分?jǐn)?shù)據(jù)集。訓(xùn)練數(shù)據(jù)集中一共有7480份圖片和雷達(dá)數(shù)據(jù),將1/3劃分為測試集,其余的為訓(xùn)練集和驗(yàn)證集。劃分后訓(xùn)練數(shù)據(jù)有4488份圖像和雷達(dá)數(shù)據(jù),驗(yàn)證數(shù)據(jù)有498份圖像和雷達(dá)數(shù)據(jù),測試數(shù)據(jù)有2494份圖像和雷達(dá)數(shù)據(jù)。
使用的二維障礙物檢測網(wǎng)絡(luò)為Yolov3檢測網(wǎng)絡(luò),檢測的類別分別有car,pedestrian和cyclist這3個(gè)類別。
實(shí)驗(yàn)主要探究了二維檢測與三維檢測之間的關(guān)系以及三維檢測的效果。本文通過擴(kuò)張二維檢測網(wǎng)絡(luò)輸出包圍框的大小,探究二維包圍框擴(kuò)張比例對檢測結(jié)果的影響,分別設(shè)置擴(kuò)張比例為5%,10%,15%,20%,30%,40%,50%,60%,70%,80%,90%,100%進(jìn)行實(shí)驗(yàn),通過對比不同二維包圍框下三維包圍框檢測效果,進(jìn)行分析。
圖4為使用Yolov3檢測的二維結(jié)果和使用提取點(diǎn)云檢測的三維結(jié)果。從3類檢測的總體結(jié)果來看,通過擴(kuò)張二維包圍框在Pointnet網(wǎng)絡(luò)中進(jìn)行檢測,檢測的精度會得到一定的提升。car,pedestrian和cyclist類型的三維檢測結(jié)果在擴(kuò)張比例分別在10%,5%,50%的時(shí)候效果最好,提升約為2%,1%,15%。總體趨勢都有提升,說明適當(dāng)?shù)脑黾犹崛↑c(diǎn)的數(shù)量,可以增加三維檢測的結(jié)果,但是隨著擴(kuò)張的提升,三維的檢測結(jié)果都會下降,說明提取的雜點(diǎn)過多,會導(dǎo)致三維檢測結(jié)果下降。最終car,pedestrian,cyclist三維檢測的最高AP值分別為64.34,42.61,15.5,mAP為40.82。
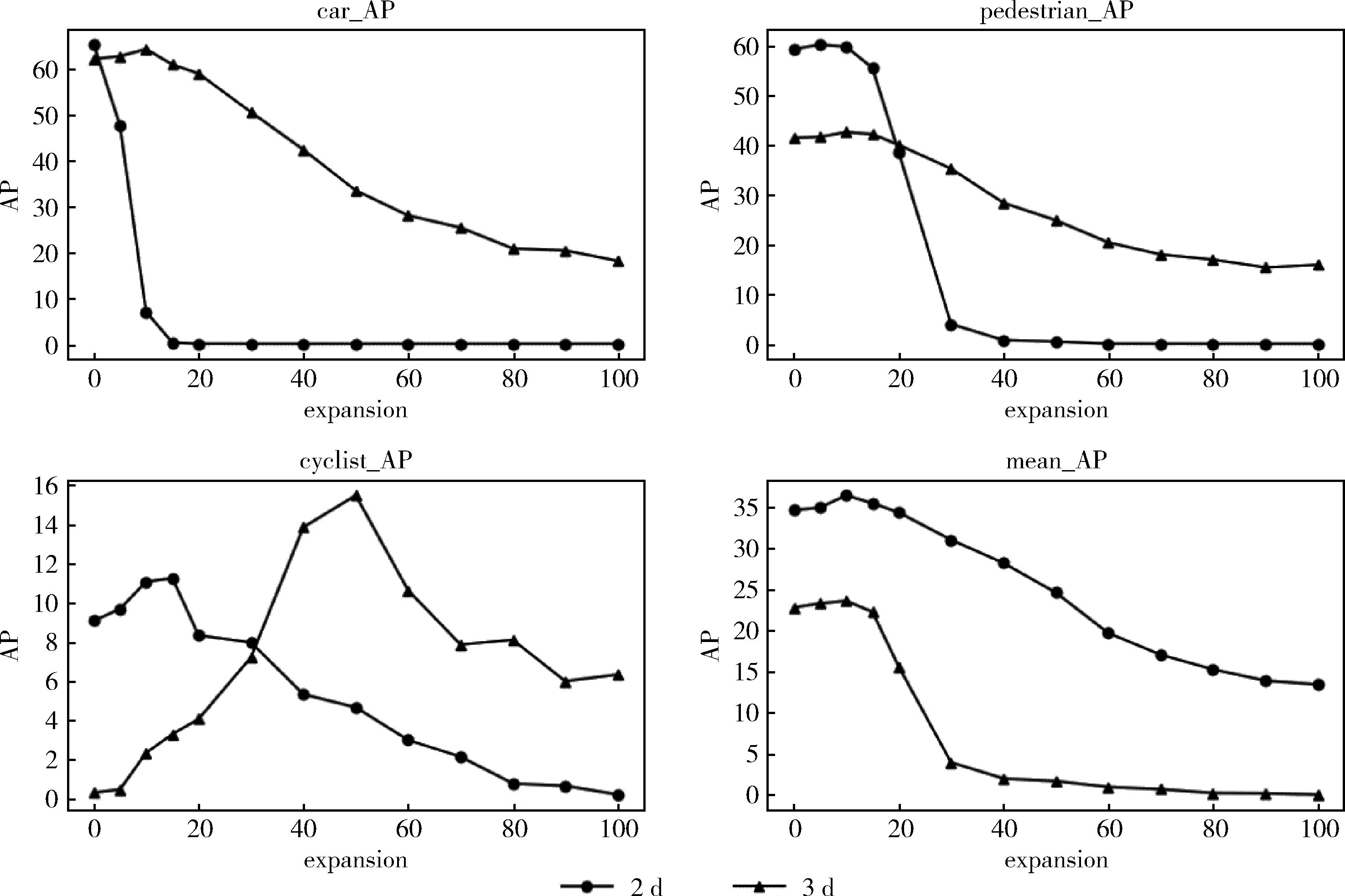
圖4 擴(kuò)張二維框的二維和三維檢測結(jié)果左上:car類型的AP;右上:pedestrian類型的AP左下:cyclist類型的AP;右下:檢測的mAP
檢測可視化結(jié)果如圖5所示,第一、二排為街道車輛的檢測結(jié)果,第三、四排為行人的檢測結(jié)果,第五、六排為人騎車的檢測結(jié)果。第一、三、五排為使用Yolov3檢測的結(jié)果,第二、四、六排為使用本文方法檢測的三維結(jié)果。從檢測結(jié)果來看,在車輛和人流比較密集的地方可以達(dá)到良好的檢測效果,較遠(yuǎn)位置的人和車也可以達(dá)到良好的檢測效果。

圖5 檢測結(jié)果可視化
3 結(jié)束語
本文基于平截頭點(diǎn)云網(wǎng)絡(luò),針對二維和三維連接的部分,提出了擴(kuò)張平截頭點(diǎn)云檢測的方法。該方法在二維檢測包圍框之后增加了比例擴(kuò)張方法,增加了點(diǎn)云提取的完整性,通過平截頭點(diǎn)云網(wǎng)絡(luò)結(jié)構(gòu)完成了障礙物的三維檢測。通過KITTI數(shù)據(jù)集的實(shí)驗(yàn)對比,該方法通過比例擴(kuò)張二維包圍框,可以有效地提高道路障礙物檢測的精度。但是,該方法比較依賴二維檢測網(wǎng)絡(luò)效果,召回率低的網(wǎng)絡(luò)會影響該方法的效果,今后可以從此處進(jìn)行提高和改進(jìn)。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
