基于單雙目結(jié)合的線結(jié)構(gòu)光掃描技術(shù)
2020-04-24 03:07:40張志毅
計(jì)算機(jī)工程與設(shè)計(jì) 2020年3期
關(guān)鍵詞:方法
王 迪,楊 龍,張志毅
(西北農(nóng)林科技大學(xué) 信息工程學(xué)院,陜西 楊凌 712100)
0 引 言
三維點(diǎn)云數(shù)據(jù)獲取技術(shù)在工業(yè)鑄件、醫(yī)療診斷、文物保護(hù)等領(lǐng)域有著廣泛應(yīng)用。依據(jù)測(cè)量設(shè)備是否與測(cè)量模型表面直接進(jìn)行接觸,可將其分為接觸式和非接觸式兩類。接觸式三維測(cè)量技術(shù)以三坐標(biāo)測(cè)量?jī)x為代表,該項(xiàng)技術(shù)通過探測(cè)頭與物體表面直接接觸以獲取物體的三維點(diǎn)坐標(biāo),測(cè)量精度可以達(dá)到μm級(jí)別,但該設(shè)備造價(jià)昂貴且容易對(duì)物體造成損耗,影響測(cè)量精度,因此并未得到廣泛使用。數(shù)字三維照相系統(tǒng)成本低,精度高,因此一直是非接觸式方法研究的熱點(diǎn)。根據(jù)有無輔助的照明設(shè)備,數(shù)字三維照相系統(tǒng)可分為被動(dòng)三維測(cè)量法和主動(dòng)三維測(cè)量法,被動(dòng)三維測(cè)量法以雙目立體視覺[1,2]為代表,此類方法系統(tǒng)構(gòu)成比較簡(jiǎn)單且適用性強(qiáng),但對(duì)物體自身特征(如顏色、結(jié)構(gòu)、紋理等)的依賴程度較高,因此具有一定的局限性。主動(dòng)測(cè)量方法以光柵投影法[3]和線結(jié)構(gòu)掃描法[4-7]較為常見,光柵投影法測(cè)量精度高但計(jì)算復(fù)雜,且對(duì)所用的光源有特殊要求。線結(jié)構(gòu)光掃描法目前存在單目[4,5]和雙目[6,7]兩種方式,單目線結(jié)構(gòu)光掃描方法掃描速度快但系統(tǒng)標(biāo)定困難,點(diǎn)云數(shù)據(jù)恢復(fù)精度較低;雙目線結(jié)構(gòu)光掃描方法能夠達(dá)到較高的精度但速度較慢,無法滿足實(shí)時(shí)性的要求。
針對(duì)以上方法存在的問題,文中提出一種單目和雙目結(jié)合的線結(jié)構(gòu)光掃描方法,用投影儀取代傳統(tǒng)激光,在雙目系統(tǒng)結(jié)構(gòu)下計(jì)算光平面方程,提高平面參數(shù)的擬合精度,然后利用求得的平面方程,在單目系統(tǒng)下計(jì)算被測(cè)物體表面的三維坐標(biāo)。本文提出的方法能夠同時(shí)兼顧掃描精度和時(shí)間效率的需求,因此具有一定的實(shí)用價(jià)值。
1 系統(tǒng)方案設(shè)計(jì)
1.1 系統(tǒng)硬件設(shè)計(jì)
整個(gè)系統(tǒng)的硬件平臺(tái)包括兩個(gè)羅技C920攝像頭(分辨率1920×1080),一臺(tái)微型投影儀(分辨率1280×720,流明2500)以及用來計(jì)算光平面方程的柱形紙筒。如圖1所示,兩臺(tái)攝像機(jī)和投影儀置于平臺(tái)同側(cè),用投影儀投射的單位像素寬度的紅色光條取代傳統(tǒng)激光,并同步使用攝像機(jī)對(duì)含有光條信息的圖像進(jìn)行捕獲,根據(jù)所獲得的圖像信息,恢復(fù)物體的三維點(diǎn)云數(shù)據(jù)。
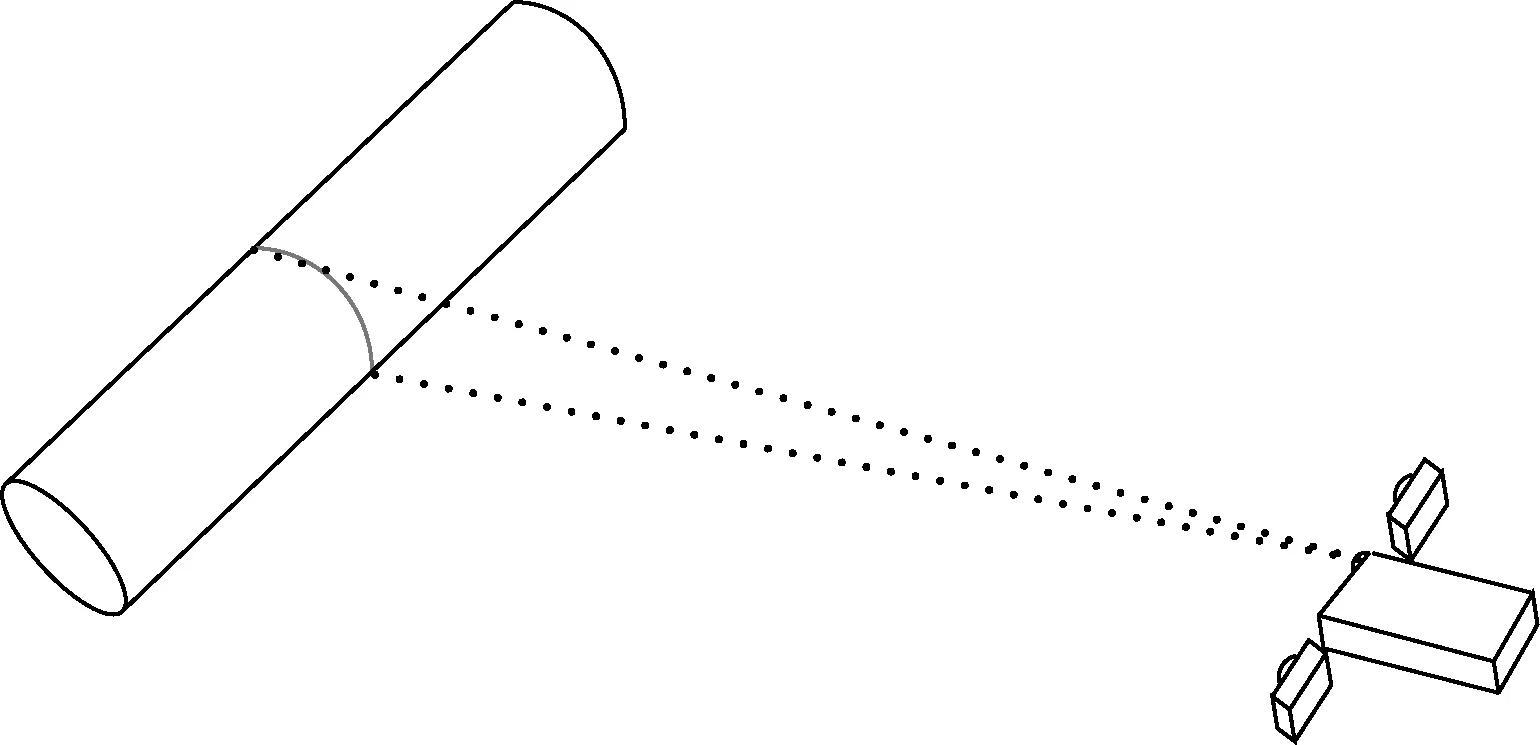
圖1 系統(tǒng)硬件平臺(tái)
1.2 系統(tǒng)軟件流程
系統(tǒng)軟件的實(shí)現(xiàn)需要在雙目系統(tǒng)結(jié)構(gòu)和單目系統(tǒng)結(jié)構(gòu)兩種環(huán)境下進(jìn)行。在雙目系統(tǒng)中,為獲取計(jì)算物體三維坐標(biāo)時(shí)所需要的相機(jī)內(nèi)部參數(shù)和兩臺(tái)相機(jī)間的位姿關(guān)系,采用經(jīng)典的張正友標(biāo)定算法對(duì)系統(tǒng)進(jìn)行標(biāo)定,之后用投影儀向柱形紙筒表面投射單位像素的紅色移動(dòng)光條,并使用兩臺(tái)相機(jī)實(shí)時(shí)進(jìn)行圖像捕獲,每獲取到一對(duì)圖像,首先采用中值濾波對(duì)其進(jìn)行去噪處理,并對(duì)圖像進(jìn)行極線校正,使得同一物點(diǎn)在兩幅圖像上的投影點(diǎn)處于同一水平位置,以此來縮小匹配點(diǎn)的空間搜索范圍,之后提取同一水平位置上左右圖像的光條中心,便可以得到對(duì)應(yīng)的匹配點(diǎn)。在此基礎(chǔ)上,計(jì)算出左右匹配點(diǎn)的視差,依據(jù)三角形原理,即可得到光條中心的三維點(diǎn)坐標(biāo),對(duì)所求得的三維點(diǎn)進(jìn)行擬合,即可得到對(duì)應(yīng)的光平面方程。在單目系統(tǒng)中,對(duì)被測(cè)物體進(jìn)行掃描,利用單臺(tái)相機(jī)采集到的圖像信息以及獲取的光平面方程即可求解物體的三維點(diǎn)坐標(biāo)。系統(tǒng)流程如圖2所示。
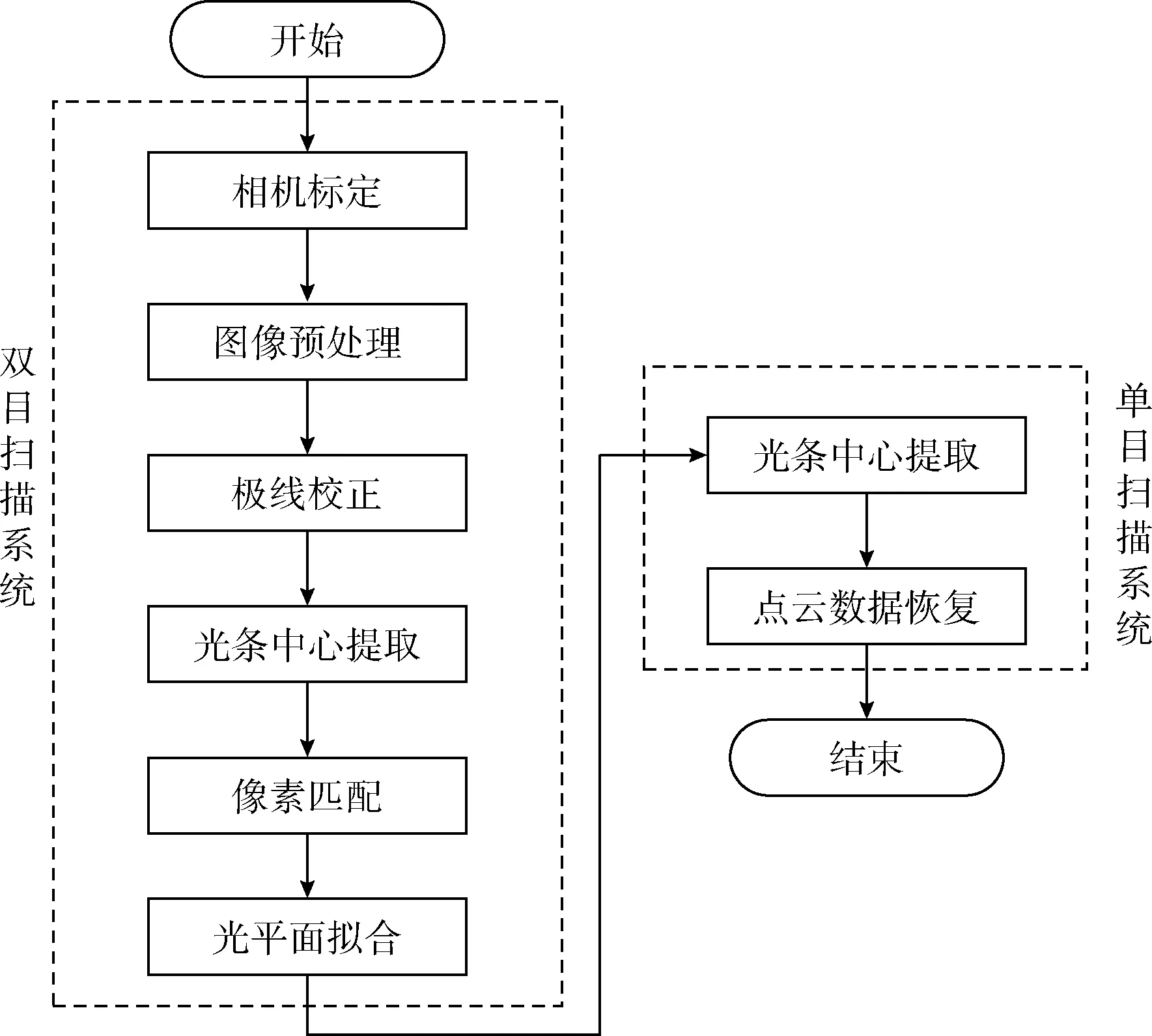
圖2 系統(tǒng)流程
2 系統(tǒng)設(shè)計(jì)原理
2.1 相機(jī)坐標(biāo)系到世界坐標(biāo)系的映射原理
如圖3所示,明確像素坐標(biāo)系到世界坐標(biāo)系之間的轉(zhuǎn)換關(guān)系,是獲取三維點(diǎn)坐標(biāo)的首要步驟。在不考慮透鏡畸變的情況下,可以將攝像機(jī)模型理想化為針孔模型,由此,兩坐標(biāo)系之間的轉(zhuǎn)換關(guān)系可以寫成式(1)的形式
(1)
式中:f表示攝像頭的焦距,dx,dy表示單位像素在圖像坐標(biāo)系中x軸方向和y軸方向上的物理尺寸, (u0,v0) 則表示圖像坐標(biāo)系原點(diǎn)在像素坐標(biāo)系中的具體位置,以上4個(gè)變量共同構(gòu)成了攝像機(jī)的內(nèi)參矩陣M1,M2是攝像機(jī)的外參矩陣,由旋轉(zhuǎn)矩陣R和平移矩陣T構(gòu)成,代表了攝像機(jī)坐標(biāo)系和世界坐標(biāo)系之間的位姿關(guān)系。文中以左攝像機(jī)坐標(biāo)系為世界坐標(biāo)系,采用經(jīng)典的張正友棋盤格標(biāo)定算法獲取左右相機(jī)的內(nèi)外參數(shù),由此即可實(shí)現(xiàn)坐標(biāo)系之間的映射。
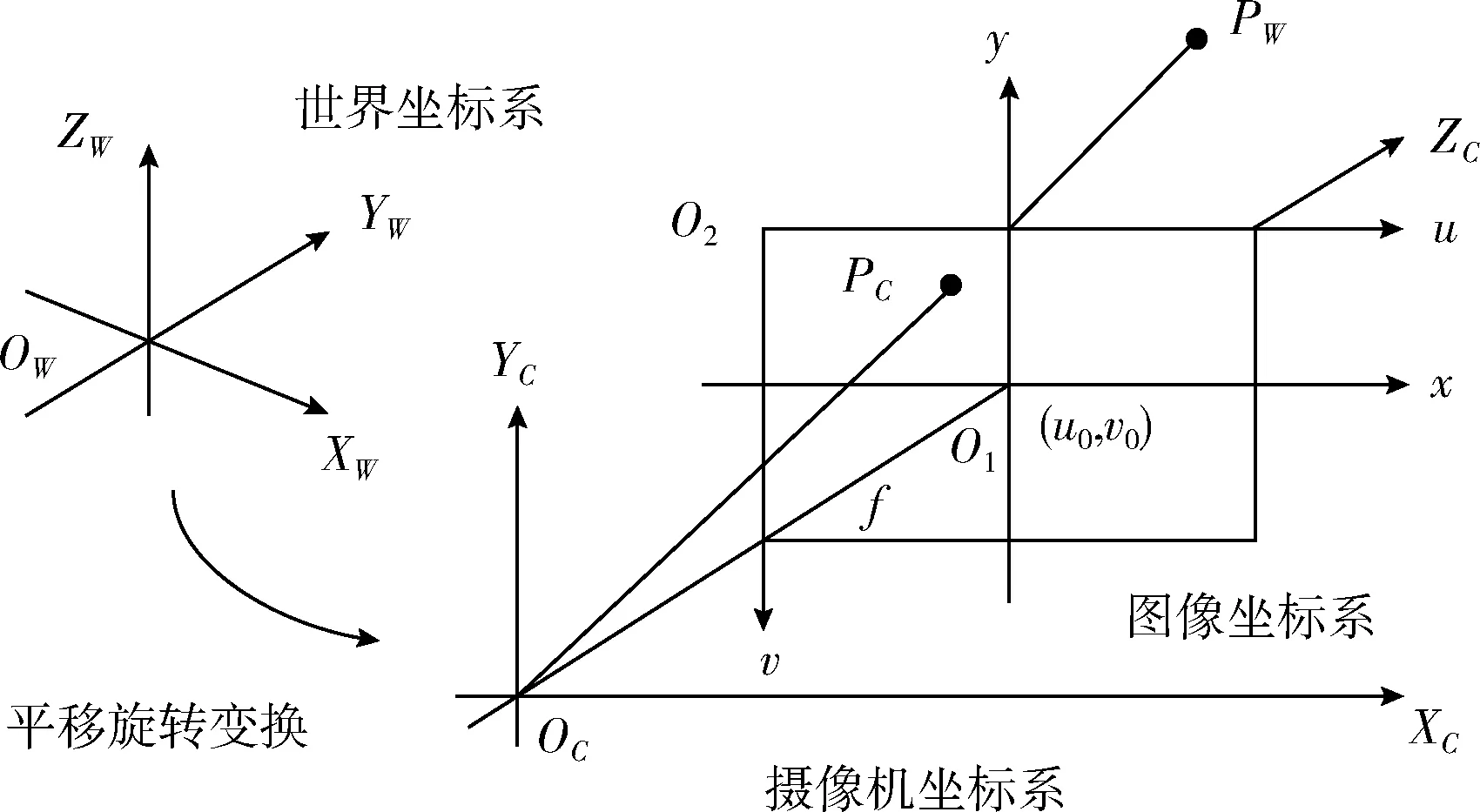
圖3 像素坐標(biāo)系與世界坐標(biāo)系的轉(zhuǎn)換關(guān)系
2.2 光條中心提取算法
為了獲取高精度的三維點(diǎn)云數(shù)據(jù),理想情況下成像到圖像上的光條寬度應(yīng)該為單位像素,但是受到物體表面材質(zhì)、環(huán)境光線及其它因素的影響,所采集圖像的光條寬度通常大于一個(gè)像素,因此首先需要進(jìn)行光條中心提取。
受外界環(huán)境及設(shè)備自身等因素的影響,采集到的光源圖像通常都會(huì)存在一些噪聲點(diǎn),這些噪聲點(diǎn)會(huì)使得光條中心的提取結(jié)果嚴(yán)重偏離正確值,進(jìn)一步影響點(diǎn)云數(shù)據(jù)的獲取精度,因此,在提取光條中心之前,首先需要對(duì)圖像進(jìn)行預(yù)處理以去除噪聲點(diǎn),考慮到光條圖像中多為銳利的噪聲點(diǎn),采用中值濾波對(duì)圖像進(jìn)行處理。除此之外,在雙目系統(tǒng)中,為了縮小匹配點(diǎn)的搜索范圍,提升查找效率,采用系統(tǒng)標(biāo)定所獲取的相機(jī)間的位姿關(guān)系,對(duì)左右兩幅圖像進(jìn)行極線校正,使得物體上一點(diǎn)在兩幅圖像上的投影點(diǎn)處于同一水平位置,之后便可對(duì)光條中心進(jìn)行提取。
按照計(jì)算方式的不同,目前較為常見的光條中心提取算法可分為幾何中心提取和能量中心提取兩大類。其中,閾值法[8]和邊緣法[9]是前者的典例,這一類方法通常比較簡(jiǎn)潔高效,但提取精度低,因此并不適用于對(duì)精確度要求較高的場(chǎng)景;灰度重心法[10]和極值法[11]是能量中心提取算法中較為常用的兩種,相較于極值法,灰度重心法的計(jì)算精度更高且魯棒性更強(qiáng),因此成為常用的一種中心提取算法。光條圖像單行像素的R通道值近似服從正態(tài)分布,符合加權(quán)重心法的使用場(chǎng)景,因此選用該方法提取光條中心。假定圖像的分辨率為m×n, 對(duì)于圖像中的第k行,其光條中心的橫坐標(biāo)xk為
(2)
其中,權(quán)值Ni的取值為
(3)
式中:R(k,i) 表示當(dāng)前像素R通道的值,此處,T不是固定的常量值,而是以當(dāng)前行中所有像素R通道的最大值為基準(zhǔn),減少t個(gè)單位所得到的值。多次實(shí)驗(yàn)結(jié)果表明,t的取值范圍在20~30之間為最佳。加權(quán)重心法的光條中心提取結(jié)果如圖4所示。
圖4 光條中心提取結(jié)果
2.3 雙目立體視覺測(cè)量模型
光平面方程的計(jì)算是在雙目系統(tǒng)結(jié)構(gòu)下進(jìn)行的,在這個(gè)過程中利用雙目立體視覺理論對(duì)三維點(diǎn)坐標(biāo)進(jìn)行求解是問題的關(guān)鍵。
如圖5所示,設(shè)Ol為左攝像機(jī)的光心,Or為右攝像機(jī)的光心,此處采用的兩臺(tái)相機(jī)型號(hào)相同,因此焦距同為f, 由于在初始階段已經(jīng)對(duì)左右像平面進(jìn)行了極線校正,因此空間中一點(diǎn)在兩幅圖像上的成像點(diǎn)基本處于同一水平高度,假定以左側(cè)相機(jī)坐標(biāo)系為參考坐標(biāo)系,則對(duì)其進(jìn)行平移,即可得到右側(cè)相機(jī)坐標(biāo)系,移動(dòng)的距離為左右相機(jī)透鏡中心距離B, 設(shè)Ol坐標(biāo)為(0,0,0),Or為 (B,0,0),P(x,y,z) 為空間一點(diǎn),其在左右像平面上的成像點(diǎn)分別為Pl(xl,yl),Pr(xr,yr), 根據(jù)各坐標(biāo)系之間的轉(zhuǎn)換關(guān)系,可以推演出如下關(guān)系式
(4)
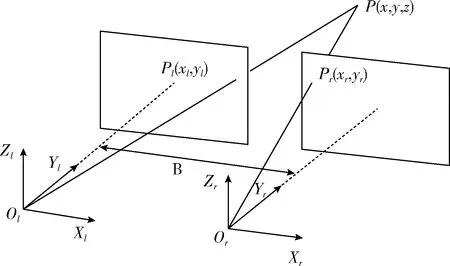
圖5 雙目立體視覺測(cè)量模型
通過對(duì)上式進(jìn)行簡(jiǎn)化可得到P點(diǎn)三維坐標(biāo)為
(5)
依據(jù)上述原理,在雙目系統(tǒng)中對(duì)柱形紙筒進(jìn)行掃描,通過提取同一水平位置左右圖像的光條中心,即可得到對(duì)應(yīng)匹配點(diǎn),恢復(fù)出投影在柱形紙筒上的光條中心的三維點(diǎn)坐標(biāo),結(jié)果如圖6所示。
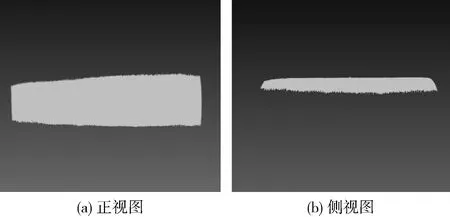
圖6 柱形紙筒三維點(diǎn)云恢復(fù)結(jié)果
2.4 點(diǎn)云數(shù)據(jù)擬合光平面
在計(jì)算出投射在柱形紙筒表面上的光條中心三維點(diǎn)坐標(biāo)之后,對(duì)其進(jìn)行擬合獲取對(duì)應(yīng)的光平面參數(shù)。目前,較為常用的平面擬合方法有最小二乘法、特征值法等。前者僅考慮了z軸方向的誤差,但在真實(shí)場(chǎng)景下,受環(huán)境及設(shè)備自身因素的影響,x、y方向上也同樣存在誤差,因此該方法在此處并不適用。特征值法通過最小化點(diǎn)到平面的距離求解平面方程參數(shù),能夠同時(shí)兼顧x、y、z這3個(gè)方向的誤差。但當(dāng)點(diǎn)云數(shù)據(jù)存在異常值擾動(dòng)時(shí),以上兩種方法的擬合結(jié)果都會(huì)受到影響,對(duì)此,李偉等[12]等提出一種改進(jìn)的最小二乘平面擬合算法,通過中位數(shù)法獲得最佳初始平面模型,并采用迭代最小二乘法剔除殘差較大的離群點(diǎn)以獲取最佳平面方程,該方法具有一定的抗差性。陳漢青等[13]提出穩(wěn)健加權(quán)總體最小二乘法,通過設(shè)置一定的規(guī)則剔除異常點(diǎn),使得求解的參數(shù)更加精確,但該算法不具有魯棒性。李希等[14]采用RANSAC(random sample consensus)算法剔除點(diǎn)云數(shù)據(jù)中的異常值,并采用總體最小二乘法對(duì)剩余的有效點(diǎn)進(jìn)行擬合,該方法能夠獲得較為理想的擬合結(jié)果,但參數(shù)的設(shè)置會(huì)對(duì)擬合結(jié)果產(chǎn)生影響。由于雙目線結(jié)構(gòu)光掃描能夠達(dá)到較高的精度,因此恢復(fù)出的三維點(diǎn)只存在少量異常點(diǎn),為了滿足實(shí)效性要求,此處采用迭代的特征值法對(duì)光平面進(jìn)行擬合。
設(shè)空間平面方程為
ax+by+cz=d
(6)
式中: (a,b,c) 為待擬合平面的單位法向量,d為坐標(biāo)原點(diǎn)到擬合平面的距離。假設(shè)對(duì)柱形紙筒進(jìn)行掃描后,從單幅圖像中共恢復(fù)出n個(gè)數(shù)據(jù)點(diǎn) {(xi,yi,zi),i=1,2,…,n}, 其中任意一點(diǎn) (xi,yi,zi) 到擬合平面的距離可以表示為
di=|axi+byi+czi-d|
(7)
為了獲得高精度的平面擬合參數(shù),應(yīng)在條件a2+b2+c2=1的約束下,滿足
(8)
設(shè)所構(gòu)成的函數(shù)f為
(9)
采用拉格朗日乘數(shù)法求解函f數(shù)的極值,并令函數(shù)對(duì)參數(shù)d的偏導(dǎo)數(shù)為零,得
(10)
則式(7)可以改寫為
(11)
將式(11)帶入式(9),并分別對(duì)a、b、c求偏導(dǎo),令所有偏導(dǎo)數(shù)為零,可得到特征值方程
(12)
由此將平面參數(shù)求解問題轉(zhuǎn)化為對(duì)矩陣特征值及特征向量的求解,設(shè)
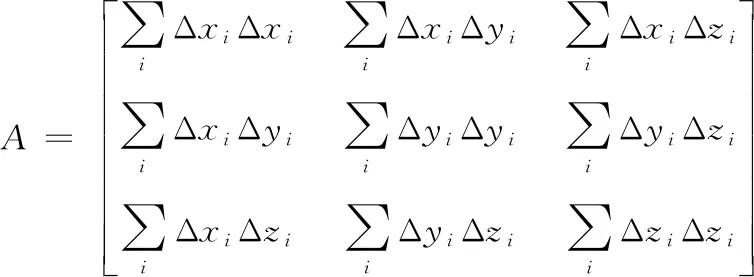
顯然,矩陣A為3×3的實(shí)對(duì)稱矩陣,求解A的最小特征值λmin及其對(duì)應(yīng)的齊次線性方程組,所得到的非零向量即為平面方程的3個(gè)參數(shù)a、b、c, 將其帶入式(10),即可得到參數(shù)d的值。
為了降低點(diǎn)云數(shù)據(jù)中的異常值對(duì)平面參數(shù)擬合精度造成的影響,采用穩(wěn)健的加權(quán)迭代思想逐步剔除數(shù)據(jù)中的離群點(diǎn),直至擬合精度滿足預(yù)定需求。具體實(shí)現(xiàn)步驟如下:
步驟1 采用特征值最小二乘法擬合平面方程,獲取初始參數(shù)值a、b、c;
步驟2 根據(jù)式(11)計(jì)算點(diǎn)云數(shù)據(jù)集中每個(gè)點(diǎn)到平面的距離di;
步驟3 根據(jù)式(13)計(jì)算所有點(diǎn)到平面距離的標(biāo)準(zhǔn)偏差,若di>2ε, 則認(rèn)為該點(diǎn)為異常值,將其從點(diǎn)集中刪除
(13)
步驟4 更新點(diǎn)云數(shù)據(jù)集并重新求解平面方程的參數(shù);
步驟5 重復(fù)執(zhí)行步驟2~步驟4,直至點(diǎn)云集合中任意一點(diǎn)到擬合平面的距離di均小于給定閾值,此時(shí) (a、b、c) 即為平面方程的最優(yōu)解;
步驟6 依據(jù)式(10)求解參數(shù)d的值,獲得最佳平面擬合方程。
在雙目系統(tǒng)中求得所有光條所對(duì)應(yīng)的平面方程后,在單目系統(tǒng)中對(duì)物體進(jìn)行掃描,通過計(jì)算相機(jī)透鏡中心與結(jié)構(gòu)光中心在像平面映射點(diǎn)的連線與對(duì)應(yīng)光平面方程的交點(diǎn),便可以計(jì)算出空間中一點(diǎn)的三維坐標(biāo)。
3 實(shí)驗(yàn)結(jié)果及分析
本次實(shí)驗(yàn)以C++作為編程語言,Windows7為系統(tǒng)開發(fā)平臺(tái),內(nèi)存4 GB。為了確認(rèn)本文方法的有效性和可行性,分別以磨砂材質(zhì)的弱紋理水杯、毛絨材質(zhì)的維尼熊和表面光滑易反光的恐龍玩具作為測(cè)量模型,并以點(diǎn)云數(shù)據(jù)獲取精度、速度及密度作為衡量標(biāo)準(zhǔn),將所提出方法的掃描結(jié)果與雙目線結(jié)構(gòu)光掃描方法和單目線結(jié)構(gòu)光掃描方法的結(jié)果進(jìn)行比較。
如圖7~圖9所示,在每組數(shù)據(jù)中,圖(a)為模型原始圖像,圖(b)~圖(d)分別為3種掃描方法所獲取的點(diǎn)云數(shù)據(jù),其中圖像左邊為點(diǎn)云的正視圖,右邊為點(diǎn)云的側(cè)視圖。從圖中可以看出,對(duì)于不同的模型,雙目線結(jié)構(gòu)光掃描方法的精度最高,文中提出的方法次之,最后是單目線結(jié)構(gòu)光掃描方法。雙目線結(jié)構(gòu)光掃描方法是對(duì)左右兩幅圖像逐行提取結(jié)構(gòu)光中心并逐點(diǎn)進(jìn)行匹配以恢復(fù)三維點(diǎn)云數(shù)據(jù),在這個(gè)過程中,結(jié)構(gòu)光中心提取和像素匹配的精度對(duì)三維掃描的結(jié)果起決定性作用,目前關(guān)于這兩個(gè)領(lǐng)域的研究已經(jīng)相對(duì)成熟,誤差可以穩(wěn)定在較小的范圍內(nèi),因此該方法相對(duì)于另外兩種精度更高;單目線結(jié)構(gòu)光掃描方法需要對(duì)背景板進(jìn)行標(biāo)定以獲取背景板平面方程,并在此基礎(chǔ)上計(jì)算光平面方程,每一步的誤差都會(huì)對(duì)后續(xù)操作造成較大影響,因此掃描精度較低,從圖7(b),圖8(b),圖9(b)的側(cè)視圖區(qū)域可看出恢復(fù)出的模型表面有一定的凹凸;文中提出的方法利用雙目線結(jié)構(gòu)光掃描法精度高的優(yōu)勢(shì),通過對(duì)柱形紙筒進(jìn)行雙目掃描以計(jì)算光平面方程,該方法計(jì)算出的光平面方程相較于傳統(tǒng)背景板標(biāo)定方法誤差小,在此基礎(chǔ)上采用單目掃描恢復(fù)三維點(diǎn)云數(shù)據(jù),此方法的掃描精度與雙目掃描方法相差不多,但掃描速度得到了較大提升。
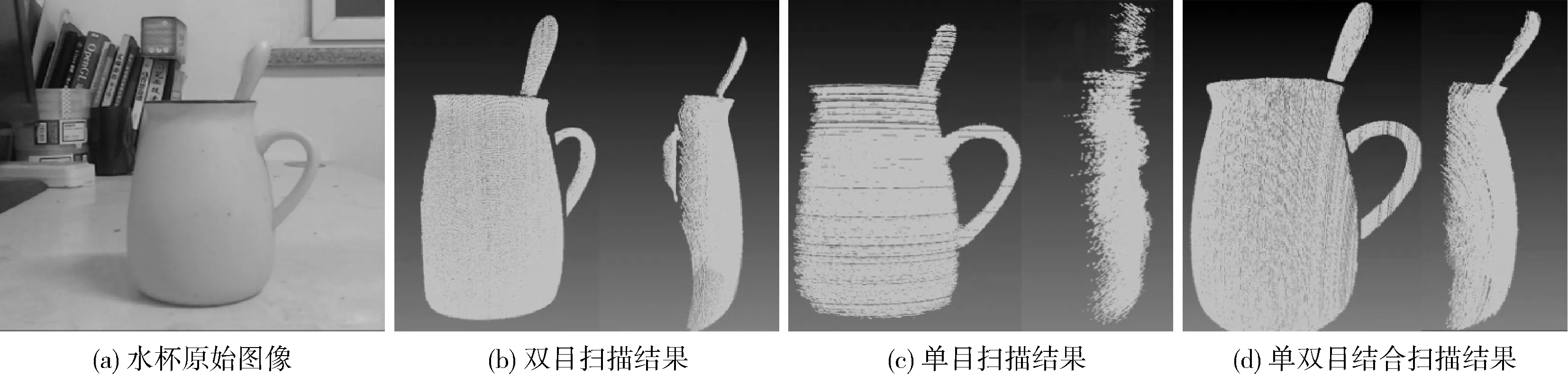
圖7 水杯三維點(diǎn)云恢復(fù)結(jié)果
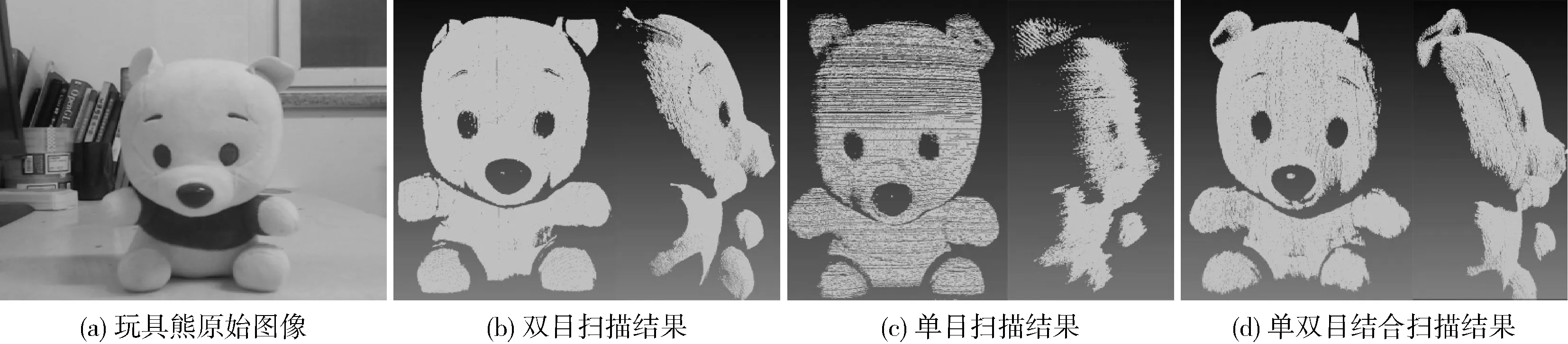
圖8 玩具熊三維點(diǎn)云恢復(fù)結(jié)果

圖9 恐龍三維點(diǎn)云恢復(fù)結(jié)果
除掃描方法外,模型材質(zhì)對(duì)掃描精度也有一定的影響。如圖7所示,對(duì)于磨砂材質(zhì)的無紋理水杯,當(dāng)紅色光條投影到物體表面上時(shí),不會(huì)產(chǎn)生反光、顏色吸收等問題,因此能夠得到較為完整的三維模型,掃描效果較好。圖8中,毛絨玩具熊的眉毛、眼睛、鼻子處呈棕黑色,當(dāng)光條被投影到這些部位時(shí),紅色被吸收,圖像上對(duì)應(yīng)像素點(diǎn)的R通道值無法達(dá)到閾值,從而形成孔洞,而鼻尖處反光處像素的R通道值大于閾值,因而可恢復(fù)出三維數(shù)據(jù)。對(duì)于表面光滑的恐龍模型,如圖9所示,其腿部、背部等點(diǎn)云恢復(fù)正常,由此可見物體上的反光點(diǎn)對(duì)點(diǎn)云數(shù)據(jù)的恢復(fù)基本上不產(chǎn)生影響。
單雙目結(jié)合的三維掃描方法不僅在點(diǎn)云數(shù)據(jù)恢復(fù)精度上能達(dá)到一定的標(biāo)準(zhǔn),在時(shí)間效率上也滿足生產(chǎn)實(shí)踐的需求。在測(cè)量模型與掃描裝置之間的距離保持不變的前提下,分別采用3種方法對(duì)不同的模型進(jìn)行掃描,并將不同情況下,根據(jù)單幅分辨率為1920×1028的光條圖像計(jì)算物體三維點(diǎn)坐標(biāo)所需的時(shí)間進(jìn)行比較,結(jié)果見表1。在等距條件下,對(duì)于不同的模型,同一方法計(jì)算三維坐標(biāo)所消耗的時(shí)間基本不受物體大小及形態(tài)的影響,即在時(shí)間效率上3種方法均是模型不相關(guān)的。其中,由于雙目線結(jié)構(gòu)光掃描方法受限于兩幅圖像的匹配速度,因此在三者中耗時(shí)最長(zhǎng),達(dá)到了368.07 ms/幅,本文提出的方法和單目線結(jié)構(gòu)光掃描方法在掃描之前均對(duì)光平面方程進(jìn)行了標(biāo)定,將時(shí)間縮短為78 ms/幅左右,是雙目掃描的1/5。
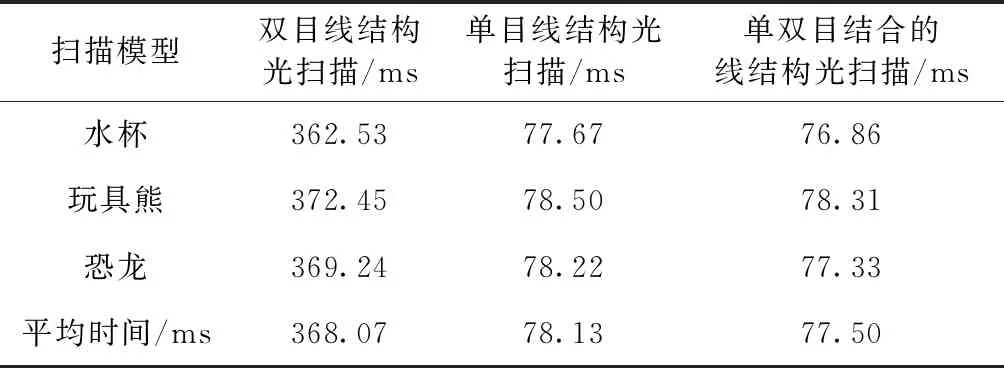
表1 單幅圖像點(diǎn)云數(shù)據(jù)恢復(fù)時(shí)間
表2顯示了等距離條件下,3種模型在不同掃描方法下恢復(fù)出的三維點(diǎn)個(gè)數(shù)。由表中可以看出,當(dāng)被測(cè)模型與掃描系統(tǒng)相對(duì)位置維持不變的情況下,對(duì)于同一物體而言,3種掃描方法獲取到的三維點(diǎn)數(shù)量基本持平,無明顯差異。
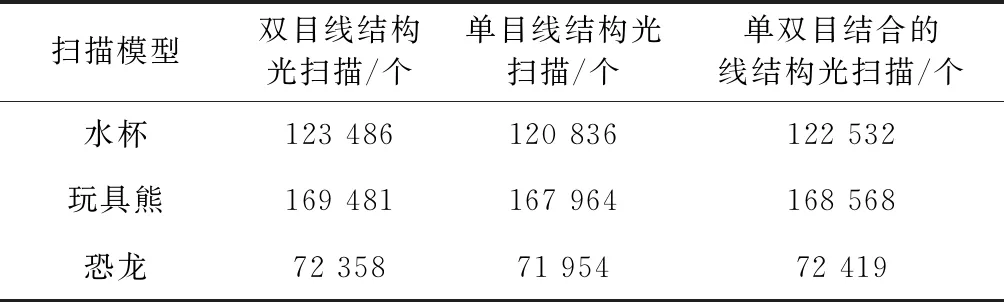
表2 等距離條件下恢復(fù)的三維點(diǎn)個(gè)數(shù)
由以上分析可知,傳統(tǒng)雙目線結(jié)構(gòu)光掃描方法能夠達(dá)到較高的掃描精度,但時(shí)間效率較低,在某些情況下無法滿足實(shí)時(shí)性的要求;傳統(tǒng)單目線結(jié)構(gòu)光掃描方法在時(shí)效上有一定的優(yōu)勢(shì),但掃描精度易受背景板標(biāo)定的影響,可能出現(xiàn)較大誤差;單雙目結(jié)合的掃描方法綜合了兩者的優(yōu)勢(shì),在掃描精度和實(shí)效性上都能夠滿足一定的要求,且恢復(fù)出的模型三維點(diǎn)數(shù)目與其它兩種方法基本持平,因此具有一定的實(shí)用價(jià)值。
4 結(jié)束語
針對(duì)傳統(tǒng)線結(jié)構(gòu)光掃描方法的局限性,提出一種單目和雙目結(jié)合的掃描方法。首先采用投影儀投射的紅色移動(dòng)光條取代傳統(tǒng)激光作為線光源,這在一定程度上縮減了硬件成本,之后,以柱形紙筒為輔助,在雙目系統(tǒng)中對(duì)其進(jìn)行掃描并采用迭代特征值最小二乘法對(duì)獲取到的光條中心三維點(diǎn)坐標(biāo)進(jìn)行擬合,得到光平面方程,該方法提高了平面參數(shù)的擬合精度,最后在單目系統(tǒng)中利用所求得的光平面方程計(jì)算物體表面的三維點(diǎn)坐標(biāo)。實(shí)驗(yàn)結(jié)果表明,該方法能夠有效發(fā)揮雙目掃描和單目掃描各自的優(yōu)勢(shì),在點(diǎn)云數(shù)據(jù)恢復(fù)精度和速度上取得有效折中,具有一定的實(shí)用價(jià)值。但需要指出的是:受外界環(huán)境和設(shè)備噪聲等因素的影響,恢復(fù)出的三維點(diǎn)云數(shù)據(jù)中難免會(huì)存在一些噪聲點(diǎn),如何剔除掃描物體之外的噪聲點(diǎn),是接下來要研究的主要內(nèi)容。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
 計(jì)算機(jī)工程與設(shè)計(jì)2020年3期
計(jì)算機(jī)工程與設(shè)計(jì)2020年3期
- 計(jì)算機(jī)工程與設(shè)計(jì)的其它文章
- 多導(dǎo)聯(lián)心電信號(hào)特征檢測(cè)系統(tǒng)的設(shè)計(jì)
- 基于物聯(lián)網(wǎng)感知的鉆井平臺(tái)數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
- 改進(jìn)biLSTM網(wǎng)絡(luò)的短文本分類方法
- 改進(jìn)YOLO的密集小尺度人臉檢測(cè)方法
- 改進(jìn)級(jí)聯(lián)卷積神經(jīng)網(wǎng)絡(luò)的平面旋轉(zhuǎn)人臉檢測(cè)
- 改進(jìn)的LeNet-5模型在花卉識(shí)別中的應(yīng)用