爆胎車輛應急自動制動系統穩定控制的策略研究
2020-04-22 16:27:49許曉秦任朝陽
微型電腦應用 2020年3期
許曉秦 任朝陽
摘 要:在完成軌跡控制評價指標構建的基礎上,對不同控制器控制爆胎車輛軌跡的效果進行了研究和分析,靜態 PID 控制器通常基于某一車速建立導致對在其他行駛車速下的爆胎車輛行駛控制效果降低。為有效提升爆胎車輛的軌跡控制效果提出增益可變 PID 控制器。該控制器根據不同的爆胎車速標定事先獲得相關參數,將該控制方案應用于軌跡控制仿真實驗中,實現了對爆胎車輛行駛軌跡的有效控制過程,恢復到原路徑時只出現了較小的偏移。
關鍵詞:爆胎車輛; 自動制動系統; 軌跡穩定控制; 實現路徑
中圖分類號: U463.5
文獻標志碼: A
Abstract:Based on the completion of the construction of the trajectory control evaluation index, this paper studies and analyzes the effect of different controllers in the trajectory control of the blasting vehicle. The static PID controller is usually based on the establishment of a certain speed, which leads to failure if the driving speed at other driving speeds. In order to effectively improve the trajectory control of the flat tire vehicle, a gain variable PID controller is used. The controller obtains relevant parameters in advance according to different tire speeds, and applies the control scheme to the trajectory. In the control simulation experiment, the effective control process of the trajectory of the puncture vehicle is realized, and only a small offset occurs when the original path is restored.
Key words:Puncture vehicle; Automatic braking system; Trajectory stability control; Implementation path
0 引言
不斷增加的汽車保有量在方便日常出現的同時,帶來了頻發的交通事故,引發汽車交通事故的原因較多多,其中爆胎危險性極高且難以預測,處于高速行駛狀態下的汽車一旦出現爆胎將會對汽車的行駛穩定性造成嚴重影響,進而影響了車輛駕乘人員的生命和財產安全。爆胎后的汽車會出現橫擺、偏航(嚴重時會出現甩尾、激轉等),駕駛員在心理緊張尤其是在駕駛經驗不足的情況下難以做出準確有效的反應采取了過度甚至錯誤的操作,進而易引發嚴重的交通事故,因此目前爆胎車輛穩定性控制已經成為領域內的研究重點之一。
1 現狀分析
目前通過將輔助安全裝置安裝于輪胎上(包括自我密封型、輔助支撐系統型輪胎)以增加輪胎強度已成為用于解決爆胎引發安全問題的解決方案,避免了爆胎車輛嚴重偏航情況的發生;通過將控制措施施加于爆胎車輛上以實現對車輛穩定停車的有效控制過程(即從控制角度入手),如BMBS(吉利集團提出,一種爆胎監測與制動系統),具體通過改進輪胎壓力監測系統(僅在胎壓異常時發出預警信號)實現,在爆胎瞬間即迫使車輛制動減速(通過強大制動力的自動提供實現),自動使車輛處于受控狀態。但這兩種解決方案無法從根本上解決安全問題。目前國內爆胎控制子系統的研究與開發大多基于汽車穩定性控制系統完成,具體通過采用差動制動方法完成對車輛橫擺運動的調整,通過線性二次型調節器算法的使用完成了控制器的設計,加權矩陣的選用需以性能要求為依據,從而確保爆胎車輛的操縱穩定性(不偏離航線),但控制器的在線實時計算過程極易增加優化時間,控制器受到固定不變的權系數的限制導致難以根據具體爆胎工況完成對系統性能的及時調整。可通過數據表的建立(以實驗數據為依據)實現最優橫擺控制力矩的查表獲取,以簡化計算過程。例如,通過將狀態參考器引入到神經網絡駕駛員模型中實現對爆胎車輛響應特性變化情況的及時掌握;針對爆胎車輛以橫擺角速度作為控制對象,通過模糊控制方法的使用實現轉向主動控制過程,但對車輛的質心側及輪胎側偏角的重視不足,在需進一步完善爆胎車輛轉向系特性[1]。本文在現有研究的基礎上,對主動安全控制系統進行了完善,以期提升自動制動系統穩定控制性能。
2 爆胎車輛安全行駛評價指標
輪胎在過高的車速下行駛會加速其損傷,降低了輪胎的抗壓性,成為爆胎事故的直接誘因。具有突發特點的爆胎在實際發生時會極大的改變輪胎的力學特性(包括徑向和切向),進而影響到車輛的穩定性和安全性,尤其是發生在高速公路上的爆胎車輛發生翻車事故的概率較大。現有轎車的布置形式以前置前驅前轉向為主,車輛轉向輪爆胎時會嚴重影響驅動、轉向和制動性能,傳統底盤集成主動安全控制系統并不能夠對爆胎汽車進行主動控制。比例、積分、微分(PID)控制是實際普遍運用的控制規律,非線性的爆胎車輛模型的主要特點在于時變性、不確定性較高,實施控制時受到無法完全精確掌握爆胎車輛結構極參數的影響導致控制理論相關技術的有效應用[1]。本文采用爆胎車輛模型(由veDYNA 軟件提供)對爆胎工況進行模擬,將方向盤轉角通過變增益 PID 控制器進行規劃,完成及時適當的主動轉向操作過程,使汽車沿道路中心線行駛并自動減速以確保爆胎車輛穩定行駛。
2.1 爆胎車輛運動狀態分析
胎內氣體在發生爆胎后迅速放盡,會顯著改變輪胎的力學特性,相比于正常胎壓輪胎的滾動阻力系數在零胎壓條件下會增大20 多倍,徑向、側偏、縱滑及側傾的剛度顯著低于正常值,車輛的運行狀態及穩定性會受到這些變化的力學特性的直接影響,如行駛汽車輪胎的滾動阻力會隨爆胎的滾動阻力系數的增大而急劇增大,相比于同軸的正常車輪速度爆胎的滾動速度會降低,造成同軸兩側滾動阻力不同,爆胎車輛在此差值作用下會產生一個附加橫擺力矩,進而導致車輛向爆胎車輪側偏航。爆胎后的脫圈阻力同樣急劇降低,駕駛員的操作不合理會增加輪胎脫離輪輞的發生概率,輪胎側向力受到觸地剛性輪輞的影響急劇增大,是引起翻車的主要誘因。以汽車左前輪為例,在不施加控制措施的情況下對其發生爆胎后的動力學響應情況進行仿真實驗研究,以便直觀說明車輛運行狀態受到爆胎性能改變產生的影響,使用仿真軟件veDYNA對仿真工況進行設定,汽車行駛于直道上附著系數為0.8,行駛速度分別為 60、120 km/h,25 s時發生爆胎,仿真結果表明:車輛在每小時60 km的車速下爆胎發生5 s時達到了10 m的側向位移,此時爆胎車輛極易駛入相鄰車道,質心及四輪的側偏角變化較小,由爆胎引起的附加橫擺力矩使車輛偏向爆胎側,在爆胎瞬時側向加速度即到達峰值,爆胎后 1 s內呈現不穩定變化趨勢的橫擺角速度即達到正向最大值;爆胎后不采取控制措施的車輛的自動減速主要借助滾動阻力實現,爆胎車輛的各性能指標在不同爆胎車速下呈現出基本相同的變化趨勢,過大的爆胎車速則會顯著增加性能指標的幅值[2]。車輛在每小時120 km的車速下爆胎的性能指標幅度會增加2倍左右,會發生更大的偏航,即行駛穩定性同爆胎車速成反比。
2.2 安全控制評價指標
本文以爆胎車輛相關理論及運動狀態為依據,對PID參數進行調整(根據爆胎車輛安全行駛評價指標),爆胎車輛穩定行駛的性能指標表征為:爆胎輪胎超過3°的質心側偏角會極大的增加駕駛員的操縱難度視為車輛不穩定,爆胎輪胎超過4°側偏角會導致輪輞同輪胎分離并觸地即視為翻車,變化較大的橫擺角速度(呈現正負近似階躍變化)易導致車輛甩尾的發生。確保爆胎車輛的基本安全在于僅出現輕微的偏航且不會駛入其他車道(包括不撞擊護欄)。四個車輪及質心的側偏角在車輛爆胎后不采取控制措施時的變化較小,爆胎不會同輪輞分離,翻車風險較小,可保持一定的行駛安全性[3]。車身較大的偏航是爆胎車輛面臨的首要危險,易導致車輛撞擊護欄或駛入相鄰車道,不穩定的橫擺角速率則增加了爆胎車輛的側滑或甩尾發生的概率。本文針對爆胎車輛以PID 控制參數的確定(根據道路中心線同車輛間的偏差)作為主要控制任務,以確保爆胎車輛穩定行駛。在高速公路上車輛爆胎時會導致車輛偏航,為有效解決這一問題,本文主要對爆胎車輛應急自動制動系統穩定控制的策略進行了研究,并對爆胎車輛軌跡控制進行了仿真研究。
3 爆胎車輛軌跡控制及仿真
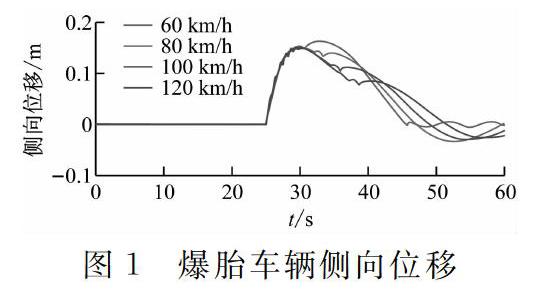
本文爆胎控制系統在監測系統發現爆胎事故時立即被觸發進入到工作狀態,并以自動行使控制權的方式為主,以不制動且依靠滾動阻力自動減速作為爆胎控制策略,仿真環境下對應的制動信號及油門踏板信號置零。車輛轉向系統在接收到由控制器規劃的方向盤轉角后(根據道路中心線同車輛間的偏差完成),再通過控制器執行車輛控制動作,保持車輛行駛于原車道中心線上,同時使車輛運行狀態滿足上文所述的約束條件。具體仿真路況和工況設置為:行駛于附著均勻的直路上的車輛(附著系數為0. 8)在行駛 25 s時(此時已達到預期速度并保持勻速行駛)發生爆胎,爆胎車速為60 km/h,進行靜態PID爆胎控制實驗。對于PID控制器,比例環節系數由P表示,微分環節的比例系數由Pd表示,積分環節的比例系數由Pi表示,結合控制目標和試湊法完成控制器控制參數的確定P=2、Pi=0. 2、Pd=5,仿真控制結果為:最大偏移量為0.17 m(處于安全范圍),車輛運行軌跡趨在爆胎20 s后可沿道路中心線行駛;側向加速度、橫擺角速率、質心側偏角的變化幅度以及輪胎側偏角較小,方向盤轉角未發生激轉(由控制器規劃),可確保車輛穩定行駛,爆胎不會與輪輞分離。同未采取任何控制動作的爆胎車輛仿真結果相比,各項行駛穩定性指標通過使用PID控制器均實現了較好的控制干預優效果(控制過程平穩),使給定的控制目標得以有效實現[4]。在車輛以60、80、100、120 km/h的爆胎車速行駛時采用本文的靜態PID控制器對運行軌跡較小控制,側向位移仿真結果如圖1所示。
爆胎車速同控制指標幅值大小成正比,相比于車輛在60 km/h車速下發生爆胎的控制效果,其他速度下的車輛側向位移仿真曲線的動態特性稍有下降,側向位移的上升段在較高爆胎速度下出現抖動并增加了控制器動態調節時間,車身出現小幅、快速擺動,爆胎車輛在側向位移回落后仍存在不穩定趨勢(沿道路中心線左右搖擺)。
4 變增益PID軌跡控制及仿真
車輛通常以60~120 km/h的速度在高速公路上行駛,對此速度區間的車輛通過使用試湊法以控制目標為依據完成軌跡控制參數的標定,車輛爆胎包括發生在直路和彎路上兩種工況。針對可能的爆胎車速及道路環境,建立了不同爆胎車速基于直路和彎路下的參數表,具體如表 1、表2所示,據此決定相應的PID控制參數,通過使用此種基于參數MAP的控制器可使PID控制器的適應性得以顯著提高[5]。
4.1 直線路況
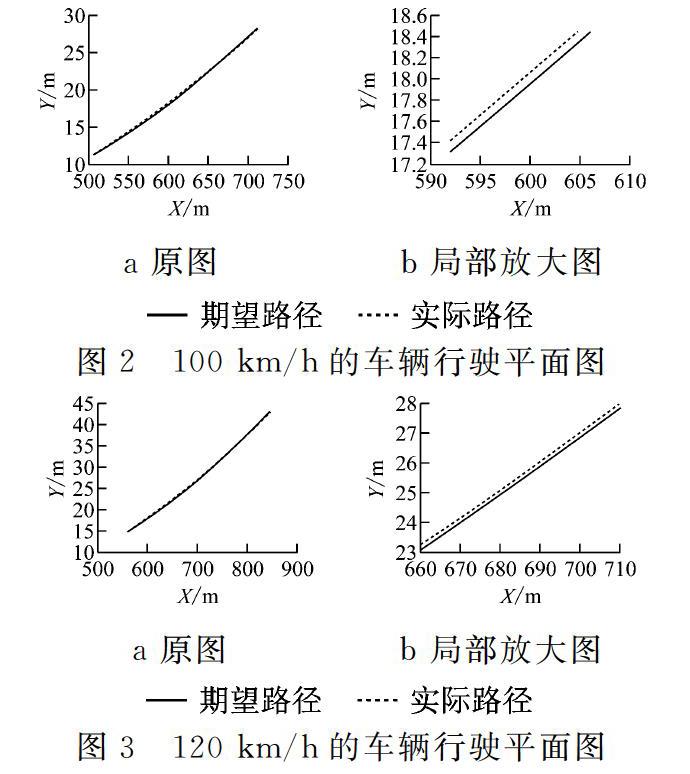
對基于變增益 PID 控制器的軌跡控制進行仿真實驗,直線路況實驗參數設置為(符合高速公路國家標準):車輛分別以80、100、120 km/h的速度行駛,在25 s 時發生左前輪爆胎(此時達到預期速度并勻速行駛),道路附著系數為0.8,速度為100、120 km/h的車輛行駛平面圖如圖2、3所示,結果表明車輛其余指標均在安全行駛指標范圍內,偏航幅度受到不同爆胎車速的影響較小并能夠在原車道上行駛,沒有側翻和輪輞觸地的危險。但控制器在爆胎車速不斷增加的情況下增加了調節和控制難度及時長,達到穩定狀態前性能指標震蕩幅度及次數均增加,側向位移上升段出現抖動,如需同時控制爆胎車輛的偏航幅度,降低震蕩次數難以只通過改變PID控制參數實現。爆胎車速增加時會提高方向盤轉角的幅值及頻率(由PID 控制器規劃)[6]。
4.2 曲線路況
為進一步驗證本文控制方案的車輛軌跡控制效果,使用veDYNA完成了路徑和行駛工況為弧度為90°的左彎曲線路段的仿真驗證(符合高速公路國家標準),附著系數為0.8,爆胎車輛以100、120 km/h的車速行駛在25 s 時左前輪發生爆胎,仿真結果表明行駛軌跡同期望路徑基本吻合,即該PID 控制器具有較好的控制效果,在 PID 控制器的作用下車輛向左右兩側反復橫擺震蕩(震蕩時間同爆胎車速成正比,2~7 s),車身在2 s后橫擺運動消失恢復穩定,位于質心側偏角的線性區(質心側偏角不超過3°),爆胎側偏角在安全范圍內,證明車輛爆胎后行駛穩定。方向盤轉角未發生激轉,確保車輛在轉向時不發生側翻,車輛借助滾動阻力能夠平穩降速。控制器能夠通過設置相應的 PID 控制參數(以具體的爆胎車速及道路環境為依據查表獲取)進行主動安全控制車輛行駛軌跡確保穩定行駛,相比于靜態PID控制器本文控制器的控制效果得以有效提升。為保證主動控制的及時有效,變增益 PID 控制器在車速或道路環境傳感器失效的情況下會先預設的參數模式進行自動切換[7]。根據目前單片機電子技術的發展情況可保證迅速可靠的查表過程(采用現有并行查表技術),從而及時有效的確保爆胎車輛安全主動控制過程,但考慮到道路環境的多樣性,本文的彎道控制參數表受到預先指定路況的限制難以獲得全面的控制效果,需逐步將各類道路工況納入到考慮范圍對,對影響控制器的參數(包括車型、輪胎類型、載質量、路面條件等)及自適應能力進行深入研究。
5 總結
車輛爆胎后發生改變的輪胎性能參數會對車輛行駛方向及穩定性產生直接影響,爆胎車輛車身劇烈的偏航的危險極大(在不干預的情況下處于直行狀態的車輛發生爆胎不一定會失穩),為此本文對爆胎車輛應急自動制動系統進行了優化,通過將MAP機制建立在 PID 控制結構上完成了一種變增益 PID 控制方案的設計,車速和爆胎道路環境同 PID 控制參數間的關系通過查表獲取,將該方案應用于爆胎控制仿真實驗,可在爆胎時對方向盤轉角進行自動合理規劃,在偏離理想運動狀態時及時糾正,從而在面對不同車速及道路環境發生爆胎情況下的 PID 適應性得以顯著提高。
參考文獻
[1] 江振飛,徐紅光,蔣素琴,等.汽車輪胎爆胎分析與原因鑒定研究[J].機械制造,2018(9):17-20.
[2] 許志超,周福強,危銀濤,等. 商用車輪胎通過噪聲與溫度、速度和花紋關系的實驗研究[J]. 橡膠工業, 2017(11):655-659.
[3] 張穎文,王國林,周海超,等. 使用因素對滾動輪胎振動特性影響的有限元分析[J]. ?橡膠工業, 2018(11):1306-1312.
[4] Christian Jacobi, Constanze Gahleitner, Henning Bier, et al. Chemoradiation and local recurrence of head and neck squamous cell carcinoma and the risk of carotid artery blowout[J]. Head & Neck,2019(8):3073-3079.
[5] Kornelia Kreiser, Isabell Grber, Claus Zimmer, et al.Stent grafts in patients with carotid blowout syndrome: Outcome and antiplatelet therapy in preventive versus emergency cases[J]. Head & Neck,2018(11):2521-2527.
[6] 李冰林,徐曉美,呂立亞,等.基于分數階微積分的爆胎汽車橫向穩定性控制[J].安全與環境學報,2018(6):2219-2224.
[7] 蔡永周,曾繁林,歐陽俊,等.基于LS-DYNA的爆胎歷程輪胎剛度特性仿真研究[J].橡膠工業,2019(6):461-465.
(收稿日期: 2019.10.21)
