基于二自由度控制的風電機組傳動鏈載荷優化研究
2020-04-19 07:08:45王爽田德唐世澤鄧英
風能 2020年12期
王爽 田德 唐世澤 鄧英
傳動鏈作為能量傳遞部件影響整個風電機組的運行質量,其動態穩定性是保障機組可靠性的關鍵。然而,由于風電機組運行環境的復雜性及惡劣程度,傳動鏈長期受到不斷變化的載荷沖擊,是風電機組失效率較高的部件之一,并且傳動鏈故障造成風電機組停機時間長、維護成本高。因此,降低傳動鏈的載荷,有助于降低風電場的運營成本,提高風電機組的可利用率。
為了減小傳動鏈載荷對風電機組可靠性的影響,可以增加機械部件的強度,但這會大大增加風電機組的制造成本,而通過有效的控制方法可以在不明顯增加成本的前提下降低載荷。目前,許多風電機組應用了基于帶通濾波器的扭轉減振器,該方法簡單直觀,但存在兩個缺陷,一個是模型的不確定性和傳動鏈參數變化可能導致該阻尼控制器控制性能變差;另一個是該控制方法雖然能夠有效降低傳動鏈的扭矩,但增大了功率波動。
鑒于此,本文提出基于二自由度變增益PID(2 degree of free gain schedule PID,2DOF-GSPID)的變槳控制方法,經驗證該控制器不僅能夠優化傳動鏈載荷、延長運行壽命,而且不影響機組的功率輸出。
風電機組傳動鏈載荷特性分析
一、傳動鏈扭振分析
氣動轉矩和電磁轉矩之間存在的偏差導致風電機組風輪加速或減速,激發傳動鏈的扭振。假設風輪剛性連接到主軸低速側,發電機轉子剛性連接到齒輪箱高速側,通過齒輪箱與主軸實現彈性連接。
風電機組傳動鏈扭振運動的動力學方程為:
風輪的氣動特性復雜多變,氣動轉矩是風速、槳距角和轉速的非線性函數。額定風速以上工況的控制目標是調節槳距角,保證轉速維持在額定值。風輪的大慣性導致轉速調節發生遲滯現象,從而引起轉速波動,因此控制轉矩輸入能夠降低傳動鏈載荷。另一方面,風速作為外部擾動,也會造成氣動轉矩的波動,因此需要平抑風速波動以改善傳動鏈的運行特性。
二、疲勞載荷計算方法
風電機組傳動鏈承受的載荷復雜多變,以載荷時間歷程為基礎,結合雨流計數法和基于Paris公式的等效載荷法對風電機組傳動鏈進行疲勞計算,確保分析的正確性及合理性。
雨流計數法具有均值與幅值雙參數計數的特點,可以綜合考慮動強度與靜強度,符合疲勞載荷本身的固有特性。它可以把載荷時間歷程簡化為若干個載荷循環,供后續疲勞載荷分析使用,其基本流程如下:
(1)通過識別轉折點,搜索應力歷程,以確定連續的波峰和波谷。
(2)對連續的波峰和波谷從應力歷史的最高峰值開始進行重新排序。
(3)掃描波峰和波谷序列,以確定雨流循環。
(4)記錄每個雨流循環的載荷均值和幅值。
根據雨流計數法得到載荷時間歷程中各等幅疲勞載荷下的應力循環次數,運用等效載荷法進一步得到傳動鏈等效應力幅值,其計算方法如式(6)―(15)所示。
2DOF-GSPID變槳控制器設計
在額定風速以上的工況,通過控制風電機組的變槳執行機構輸出合適的槳距角,將發電機轉速控制在額定值附近,變槳控制原理如圖1所示。
PID變槳控制算法因結構簡單,易于實現,廣泛應用于工程領域。由于風電機組具有強非線性,因此在控制系統的設計中,需要使用增益調度的PID變槳控制器來滿足不同狀態下控制系統的性能需求。但是增益調度的設計是困難且復雜的,其基本難點是在風輪轉速跟蹤與扭轉振動之間尋找最佳平衡(圖2):增益Kp、Ki 過小時,風輪轉速的跟蹤效果很差,增加增益可改善轉速跟蹤,但同時會增加控制器的帶寬,減弱系統抗干擾能力,過大的Kp、Ki 會使風電機組系統不穩定。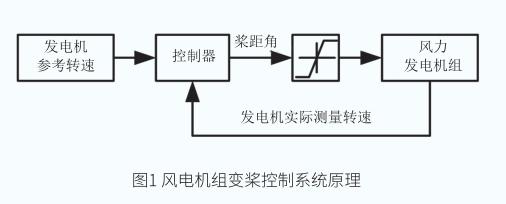
為了克服變增益PID(gain schedule PID,GSPID)的這種矛盾,學者們設計了許多現代控制器,如自適應控制、模糊控制、魯棒控制等。但由于控制器的復雜性,其并沒有在商業化機組中得以應用。有研究表明,2DOF-GSPID控制器具有GSPID控制器結構簡單的優點,并且能夠實現目標跟蹤和擾動抑制。該控制技術應用在加熱爐自動燃燒、鍋爐主蒸汽壓力等控制系統中皆有顯著成效,但在風電機組上的應用效果有待檢驗,因此,本文在風電機組控制系統中應用2DOF-GSPID控制器,以驗證其可以實現在滿足轉速跟蹤的同時減小轉速波動,進而抑制傳動鏈的扭振。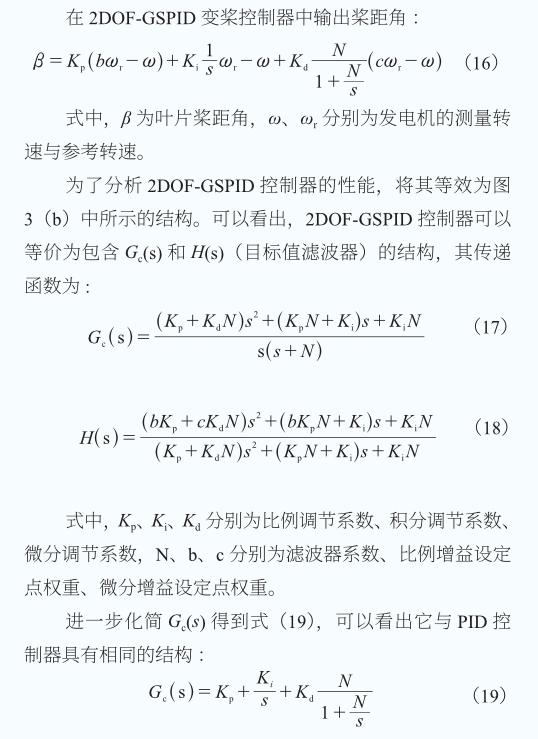
令b=1,c=1,即H(s)=1, 此時,2DOF-GSPID控制器等價于GSPID控制器,可知GSPID控制器是2DOF-GSPID控制器的一種特殊情況。與GSPID控制器相比,2DOFGSPID控制器提供了具有比例和微分增益的設定點權重,增加了可調參數,提高了伺服控制性能,也使得控制系統的魯棒性更好。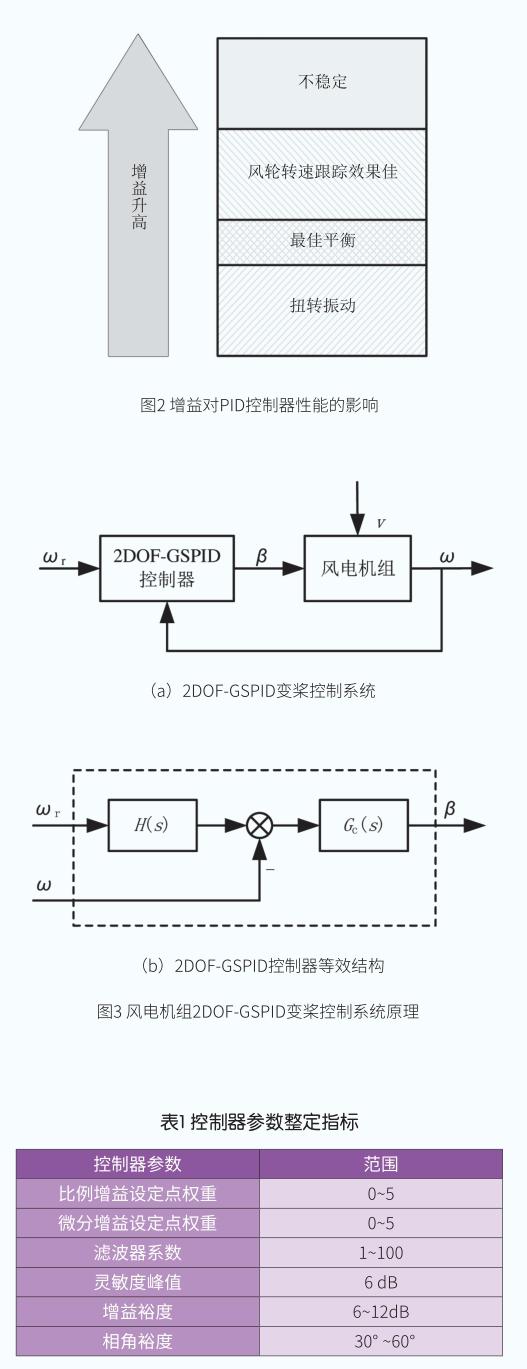
但是2DOF-GSPID參數較多的特點給控制器設計增加了難度,且參數整定作為控制器設計中的關鍵一環,變增益控制器參數整定工作量更大,在控制器設計的工作量中占有很大比重。為了解決這一難題,有學者提出了基于靈敏度分析的控制器參數整定方法,將參數整定轉化為非凸優化問題,能夠在保證控制器性能的同時滿足幅值裕度和相角裕度。因此,本文使用靈敏度法整定2DOF-GSPID控制器的參數。經過大量仿真實驗,建議控制器參數整定指標如表1所示。
仿真分析
本文采用某1.5MW三葉片、上風向、變速變槳水平軸風電機組作為研究對象進行仿真,機組主要技術參數如表2所示。
一、控制器性能分析
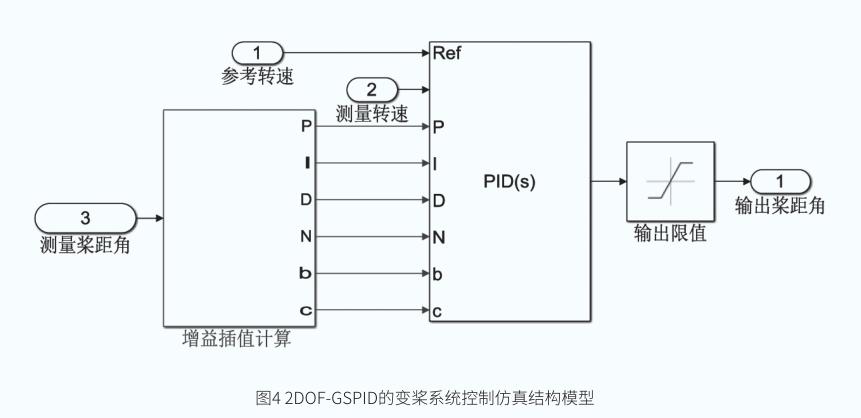
為了驗證控制系統的性能,在MATLAB /Simulink平臺上設計2DOF-GSPID變槳控制器,其結構模型如圖4所示。按照上述標準,使用MATLAB軟件內置的Control System Designer進行參數整定。
值得注意的是,為了抑制實際變槳系統輸出限值造成的“積分飽和”現象,采用遇限削弱積分法對控制器進行抗“積分飽和”處理。
將Simulink模型編譯生成C++代碼,編寫動態鏈接庫文件,導入GH Bladed軟件,用于高保真度風電機組模型仿真計算。
首先將階躍風作為輸入,比較分析GSPID和2DOFGSPID變槳控制器的控制性能,仿真結果見圖5。圖5(a)展示了15.5~17.5m/s的階躍風速曲線。圖5(b)中,相較于GSPID變槳控制器,2DOF-GSPID控制器作用下的槳距角變化曲線更加平穩,變槳執行器能夠更好地跟蹤風速變化。從圖5(c)可以看出,2DOF-GSPID控制器作用下的功率曲線沒有超調量,與GSPID變槳控制器相比有效抑制了超調,能夠使機組更好地穩定在額定功率值附近,出力特性更佳。分析圖5(d)展示的傳動鏈扭矩響應,2DOFGSPID變槳控制器作用下的波動幅值比GSPID降低約26.8%。 由此可以看出,額定風速以上風況條件下,槳距角的微小變化對風電機組有著顯著影響,因而2DOF-GSPID控制器有效改善了變槳系統動態特性,在不影響功率輸出的前提下,優化了機組傳動鏈載荷。
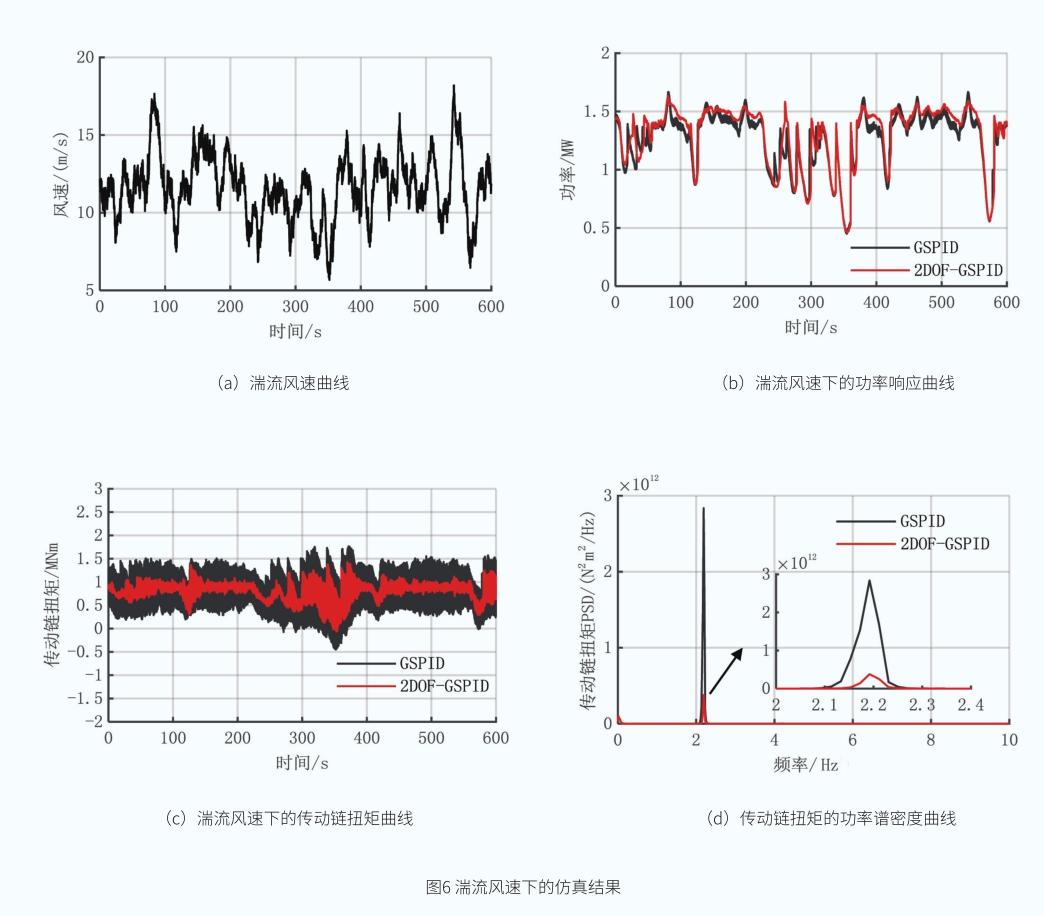
為了進一步驗證2DOF-GSPID控制器的性能,依據IEC61400-1―2005風電機組設計要求標準進行湍流風況仿真,其中湍流特征值為0.16,50年一遇極端10分鐘平均參考風速為37.5m/s,風切變指數為0.2,湍流風風速譜使用Kaimal模型,將仿真結果與GSPID控制器進行性能比較,結果如圖6所示。圖6(a)為Kaimal風湍流模型生成的風速曲線,輪轂中心平均風速為11.5m/s,縱向湍流度19.79%。從圖6(b)可以看出,兩種控制器出力特性基本一致,它們表現出相似的功率跟蹤能力。圖6(c)說明了相較于GSPID控制器,2DOF-GSPID控制器作用下的傳動鏈扭矩波動更小,幅值降低了四分之一左右。該機組的傳動鏈頻率為2.21Hz左右,與機組的9P頻率極為接近。從圖6(d)可以看出,2DOF-GSPID控制器能夠有效降低傳動鏈扭矩在共振頻率附近的功率譜密度(power spectrum density ,PSD),使共振頻率下的扭振得到有效抑制。綜上所述,2DOF-GSPID控制器能夠在保證風電機組出力特性的同時優化傳動鏈載荷,增加傳動鏈的可靠性。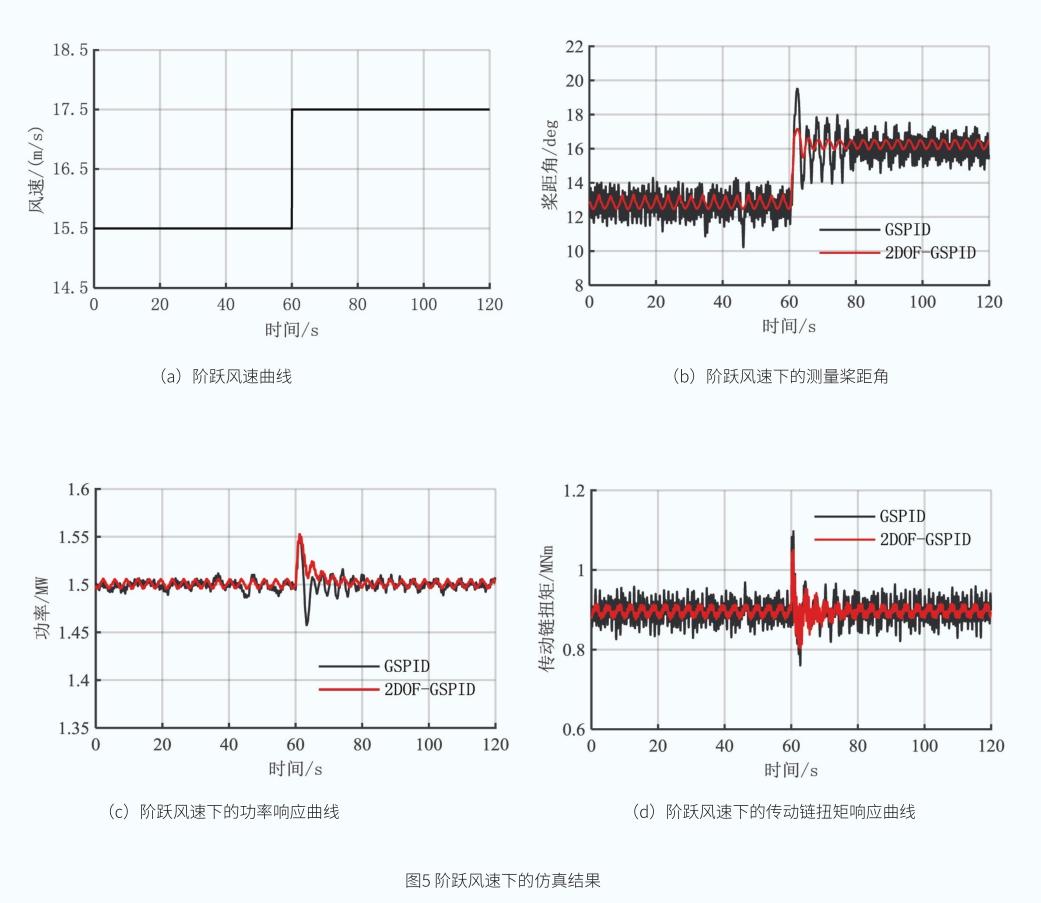
二、疲勞載荷分析
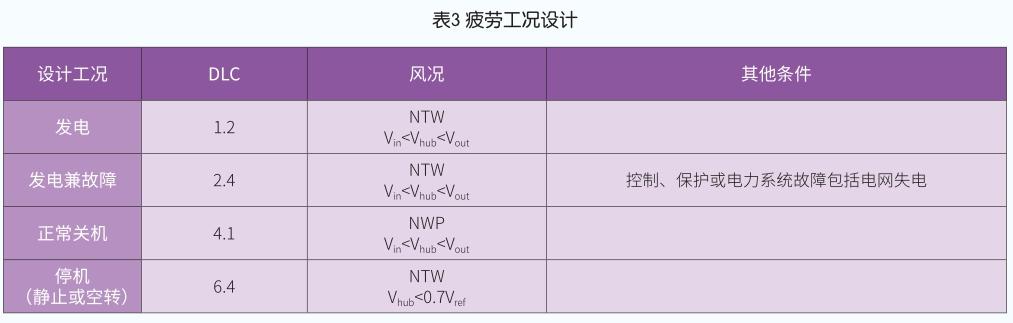
依據IEC61400-1―2005標準,利用GH Bladed軟件設定相應的疲勞載荷工況(表3)。
應力-壽命曲線(S-N)的反斜率與材料種類相關,在風電機組中,金屬材料反斜率值較小,通常取4;葉片為復合材料,其反斜率值較大,通常取10。計算設計壽命為20年的風電機組在1E7次循環下傳動鏈在全生命周期內不同S-N曲線反斜率m值下的等效疲勞載荷,其結果如圖7所示。當m=4時,2DOF-GSPID變槳控制策略下的傳動鏈扭矩等效疲勞載荷明顯低于GSPID控制策略。
設定該風電機組所處風電場的年平均風速為8.5m/s,且服從瑞利分布,根據此條件對所有疲勞工況的時間歷程載荷數據進行雨流統計計數,并考慮各個工況的頻次及在全年中的分布小時數。通過GH Bladed軟件計算可得如圖8所示的結果,在相同傳動鏈扭矩下,2DOF-GSPID控制策略下的循環次數低于GSPID控制器,由此可見在2DOF-GSPID變槳控制策略下,疲勞載荷優化效果良好。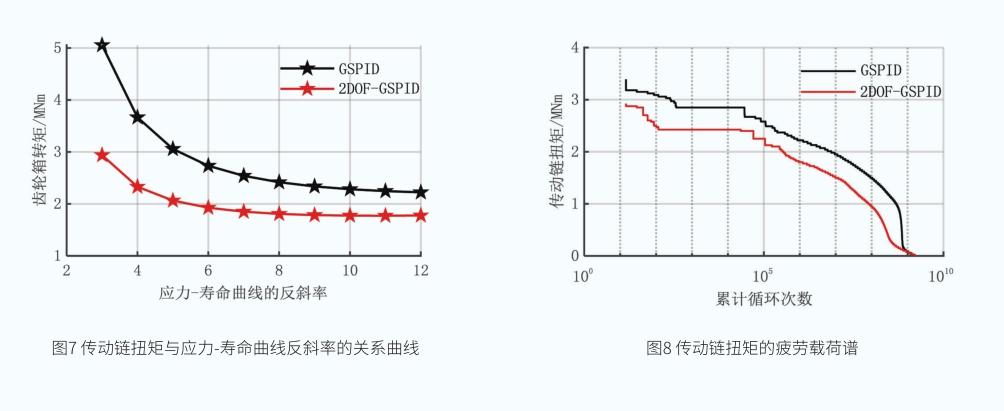
結論
本文詳細分析了風電機組的輸入特性,針對風電機組傳動鏈載荷優化提出了一種基于2DOF-GSPID的變槳控制方法,并以 GH Bladed 軟件的風電機組建模及仿真計算為依據,分析了GSPID及2DOF-GSPID變槳控制策略下不同風速模型對應的功率及傳動鏈載荷響應結果,得出結論如下:
(1)階躍風輸入測試結果表明,與GSPID相比,2DOF-GSPID變槳控制策略作用下的功率響應及傳動鏈扭矩響應更加平穩,波動更小。
(2)湍流風仿真結果表明,2DOF-GSPID變槳控制策略使得風電機組在湍流風況條件下,傳動鏈載荷幅值降低,波動減小,同時功率輸出不受影響。
(3)對設定的疲勞工況時間歷程載荷數據進行雨流統計計數,2DOF-GSPID變槳控制策略下的傳動鏈扭矩等效疲勞載荷相對于GSPID有明顯下降。
(作者單位:華北電力大學新能源學院)
猜你喜歡
電機與控制應用(2021年12期)2021-02-28 07:55:52
能源工程(2020年6期)2021-01-26 00:55:22
海洋通報(2020年5期)2021-01-14 09:26:54
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
西南交通大學學報(2016年4期)2016-06-15 20:29:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
