考慮局部遮擋的太陽能無人機能源控制
2020-04-15 09:27:54劉剛王正平劉莉張曉輝曹瀟
航空學報 2020年3期
劉剛,王正平,劉莉,張曉輝,曹瀟
北京理工大學 宇航學院,北京 100081
太陽能無人機是將太陽光轉換為電能作為其能量來源[1],為了滿足無人機飛行性能需求,太陽能無人機一般采用太陽能電池與蓄電池混合能源的方式[2],能源管理與控制是其關鍵技術之一。
能源管理的目標是充分利用各能源優勢,提高混合能源系統效能。能源管理策略可分為基于規則的策略和基于優化的策略[3-5]。基于規則的能源管理策略已廣泛應用于混合動力汽車工業[4]。基于優化的能源管理策略思路是根據目標函數和約束條件,使用優化算法在可行域內進行搜索,使目標函數能夠取到最優值或次優值。主要包括全局優化策略(如動態規劃[6]等)和非全局優化策略(如等效燃料消耗最小策略[7]等)。太陽能無人機的混合能源管理策略也得到了一定的研究[2,8-10]。
在飛行過程中,飛鳥、云彩等外界因素會對太陽能電池造成遮擋;在日出、日落以及轉彎機動過程中,螺旋槳、垂尾、安定面等也會對太陽能電池造成遮擋;這些都會在太陽能無人機的太陽能電池上產生局部陰影現象。在均勻輻照情況下,太陽能電池的功率-電壓(P-V)曲線只有一個最大功率點,而局部陰影情況下,由于旁路二極管的存在,太陽能電池的P-V曲線上會存在多個峰值。為了處理局部陰影情況下的多極值問題,研究者提出了多種基于現代優化方法的最大功率點追蹤(MPPT)技術[11],進化算法有著較好的表現[12]。螢火蟲算法[13]是一種基于群體的尋優算法,具有計算效率高、設置參數少、易于實現等優點[14],目前已廣泛應用于圖像處理[15]、函數優化[16]、數據挖掘[17]、路徑規劃[18]等研究領域。2014年,Sundareswaran等[19]采用螢火蟲算法,實現了太陽能電池在局部陰影條件下的最大功率點追蹤。2015年,Safarudin等[20]提出了簡化螢火蟲算法,通過不斷更新β系數,忽略α和γ系數來簡化算法。2017年,Teshome等[21]使用所有螢火蟲的平均坐標作為代表點改進螢火蟲算法,單個螢火蟲僅朝向平均坐標移動,通過減少螢火蟲的移動次數來提高跟蹤速度。
本文針對太陽能無人機飛行過程中太陽能電池可能出現局部遮擋的問題,開展局部遮擋情況下太陽能電池/蓄電池混合控制研究。首先,對螢火蟲算法進行改進,提高太陽能電池陣列功率曲線多極值情況下全局最大功率點的追蹤效率;然后,設計考慮局部陰影情況下太陽能無人機的太陽能電池/蓄電池混合能源狀態機控制規則;最后,以“蒲公英I”無人機[22]為例,開展仿真分析,驗證本文方法的效果。
1 基于改進螢火蟲算法的最大功率點追蹤
1.1 螢火蟲算法的改進
螢火蟲算法(Firefly Algorithm, FA)是一種啟發式算法,把空間各點看成螢火蟲,利用發光強的螢火蟲會吸引發光弱的螢火蟲的特點,在發光弱的螢火蟲向發光強的螢火蟲移動的過程中,完成位置的迭代,從而找出最優位置,完成尋優過程。在FA算法中,第i和第j個螢火蟲的相互吸引度表示為
(1)
螢火蟲i被另一個更有吸引力的螢火蟲j所吸引的位置更新公式為

(2)

螢火蟲算法中相對吸引度β與2個螢火蟲間的距離r和最大吸引度β0相關。較大的β0能使算法快速收斂,但收斂精度較低;較小的β0會使收斂速度變慢,但收斂精度更高。
2個螢火蟲間的相對吸引度還與螢火蟲的亮度有關[6]。本文提出將發光亮度引入相對吸引度β的計算過程,綜合解決收斂速度和收斂精度的問題。改進的螢火蟲算法(Modified Firefly Algorithm,MFA)具體為:引進相對亮度差閾值BTH;當2個螢火蟲的相對亮度值小于BTH時,相對吸引度β與亮度差無關,采用式(1)計算;當2個螢火蟲的相對亮度差大于BTH時,相對吸引度β與亮度差相關,認為當螢火蟲i和j之間的距離一定時,其亮度差越大,相對吸引度越大,此時的相對引度計算表達式為
(3)
式中:Bi和Bj分別為螢火蟲i和j所對應的亮度;θ為亮度縮放因子。
通過引入BTH,可在搜索過程中針對不同亮度的螢火蟲實現參數β的自動調整。在搜索的初期階段,螢火蟲距離較遠,亮度差值普遍大于BTH,其β也相對較大,能夠提高收斂速度。在搜索的后期,螢火蟲距離較近,亮度差值普遍小于BTH,能夠對搜索結果進行微小調整,提高收斂精度和輸出穩定性。
為使MFA的執行效果最佳,需要對BTH和θ的取值進行精細調整。BTH取值應小于最大亮度的10%,以保證搜索初期大部分螢火蟲的亮度差普遍大于BTH;BTH和θ的取值應滿足θBTH≥β0。較大的θ使得搜索初期螢火蟲能夠較快聚集,加快收斂速度,但是過大的θ會導致錯過全局最大功率點的可能性增加,因此,θ取值應該從小到大逐漸調整。
1.2 基于MFA的最大功率點追蹤方法
在利用MFA進行最大功率點追蹤時,螢火蟲的位置對應太陽能電池陣列的輸出電壓Vpv.i,螢火蟲的亮度對應該電壓下的太陽能電池陣列輸出功率Ppv,i,螢火蟲的相對亮度差閾值對應功率差閾值PTH。在最大功率點追蹤過程中,MFA通過不斷調節太陽能電池陣列的輸出電壓來搜索全局最大功率點。
算法中,初值的選取既要有利于算法較快收斂,又要避免丟失極值點。本文設定初始電壓個數與螢火蟲數目相同,且均勻分布在整個搜索區間內。初始電壓值計算表達式為
(4)
式中:VUB和VLB分別為搜索區域的電壓上界和下界;N為螢火蟲的數目。
在全局最大功率點的搜索過程中,由于MFA不斷更新輸出電壓,進而導致太陽能電池陣列輸出功率的持續波動。在搜索前期,各點的功率相差較大;在搜索后期,各點集中在最大功率點附近。為減小不必要的功率波動,使輸出功率能夠穩定,采用如下終止策略:當各點的功率差值均小于最大功率誤差值ε1時,終止算法,即
|PGbest-Ppv,i|<ε1i=1,2,…,N
(5)
式中:PGbest為已搜索到的全局最大功率;Ppv,i為各個螢火蟲的實際功率。
當算法終止后,若光照強度發生變化或者出現局部陰影現象時,太陽能電池陣列的最大功率點會發生移動,這時重新啟動算法,進行新一輪的全局最大功率點搜索。引入功率變化量閾值ΔPTH和功率變化量ΔP,當ΔP大于該閾值時重新啟動算法。
(6)
式中:Ppv為當前太陽能電池陣列的實時功率。
基于MFA的最大功率點追蹤控制流程如圖1所示,圖中Ipv,i為各個螢火蟲實際電流。

圖1 基于MFA的MPPT控制流程Fig.1 Flowchart of MPPT control based on proposed MFA
2 基于狀態機的太陽能電池/蓄電池混合能源控制
對于采用太陽能電池/蓄電池混合能源的太陽能無人機,不僅要考慮太陽能電池的最大功率點追蹤,還要綜合考慮2種能源的管理與功率分配問題。本文采取“獨立控制與綜合管理”的思路,提出混合能源的管理策略:采用MPPT控制器對太陽能電池最大功率點進行獨立控制;同時,實時監測載荷需求和能源系統狀態,采用狀態機策略從功率層面對太陽能電池輸出功率和蓄電池充放電功率進行管理。
混合能源控制基本原則是:太陽能無人機動力系統需求功率由太陽能電池和蓄電池滿足,若太陽能電池功率有剩余則為蓄電池充電,保證功率分配滿足功率平衡原則。太陽能電池和蓄電池狀態主要依據蓄電池剩余電量(SOC)、需求功率(PD)、上一時刻太陽能電池最大功率(Ppvmax)3個狀態參數劃分。表1為所制定的混合能源狀態機策略控制規則表,其中:太陽能電池輸出功率Ppv為控制量;PD為需求功率;Ppvmax為太陽能電池最大功率;Pchrg為蓄電池最大充電功率。
為了避免蓄電池出現局部狀態陷阱、保證狀態間的平滑過渡,在蓄電池電量狀態臨界點加入狀態回滯環[23](見圖2),在SOC臨界值附近增加狀態回滯區域,在該區域內保持上一電量狀態,進而解決局部狀態反復跳變問題。
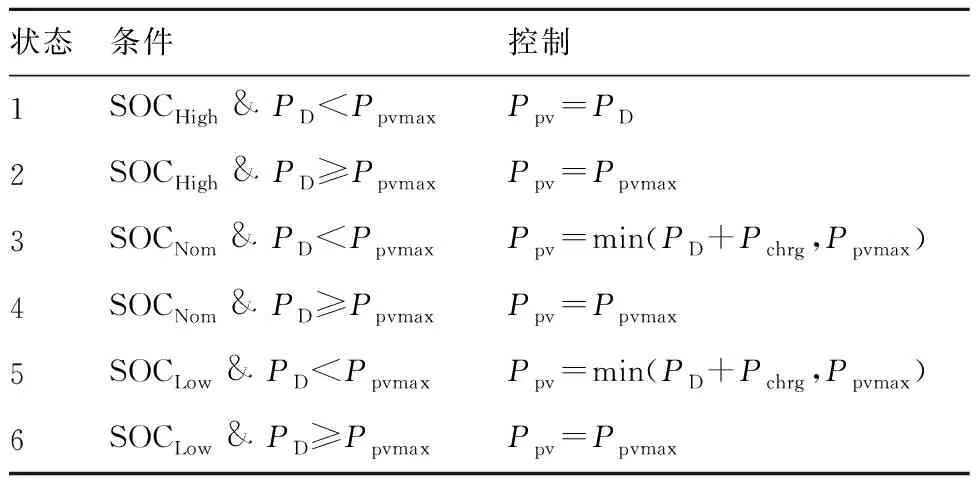
表1 狀態機能源管理策略規則
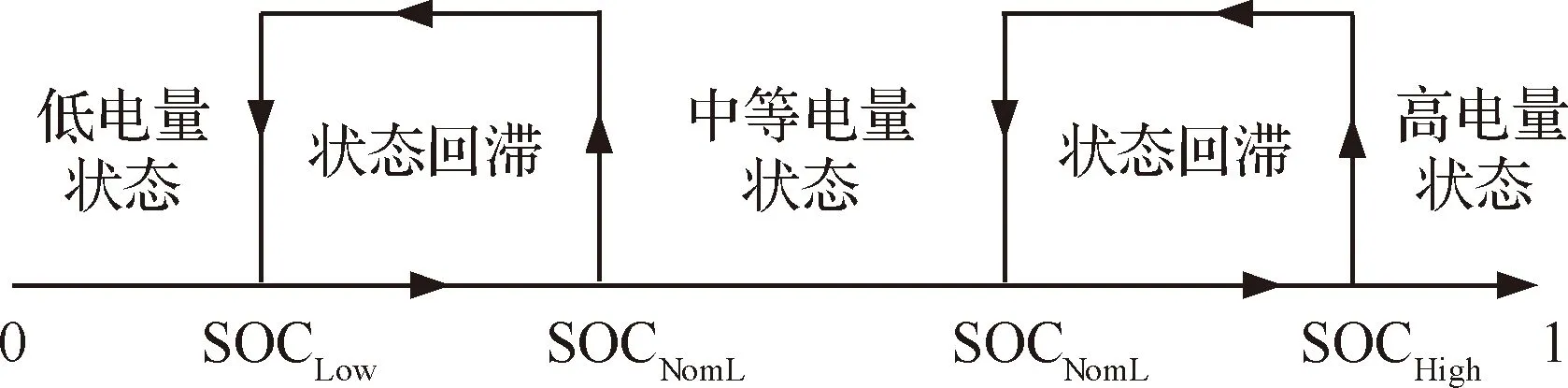
圖2 蓄電池電量狀態回滯環設計Fig.2 Battery power state hysteresis loop design
基于上述規則,設計狀態機能源管理策略控制流程如圖3所示。
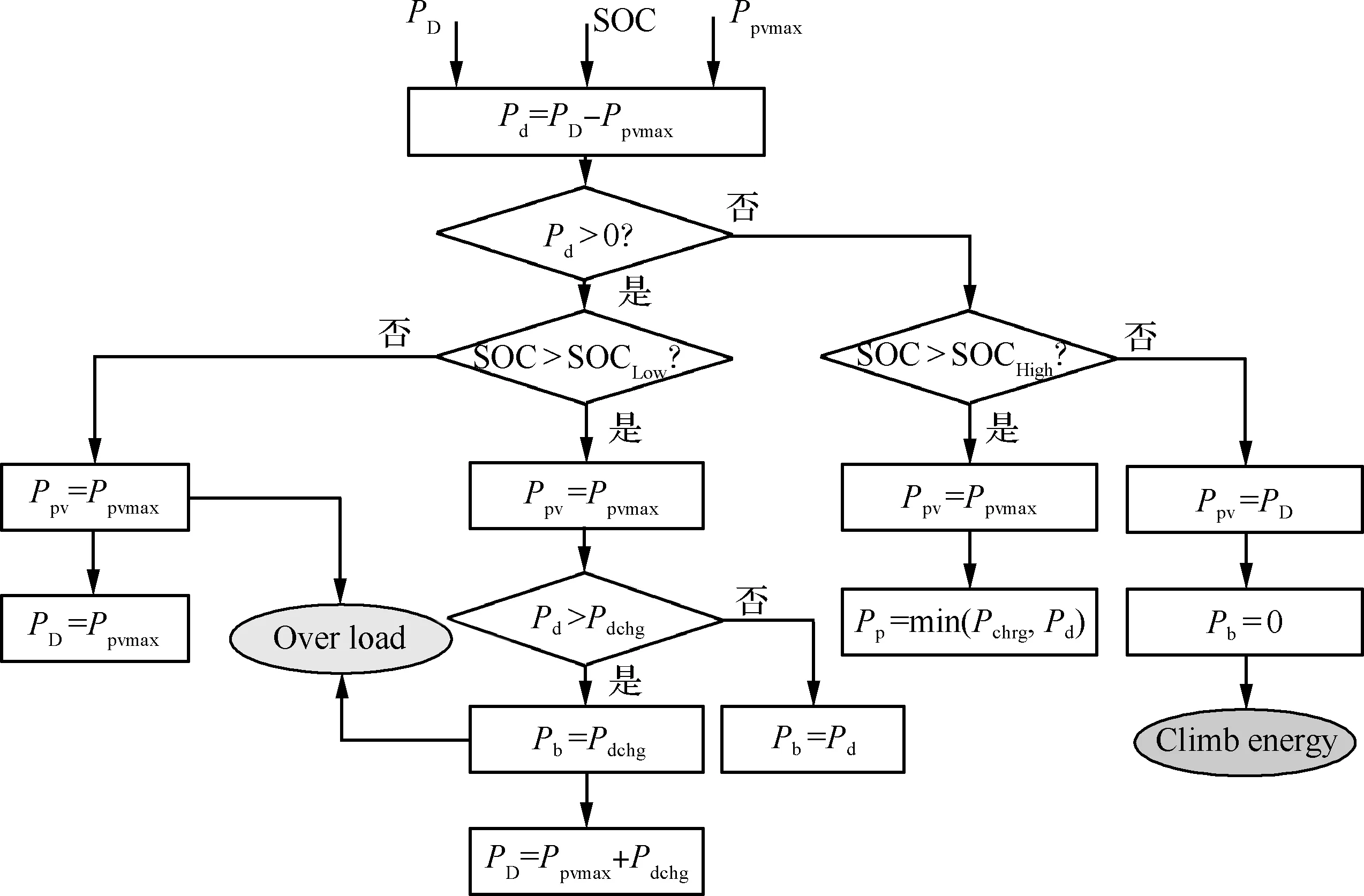
圖3 混合能源控制流程Fig.3 Hybrid energy control process
3 仿真與分析
本文以“蒲公英I”無人機[22]為例,采用本文提出的算法和規則,開展太陽能電池局部遮擋情況下最大功率點追蹤和混合能源控制的仿真分析。
3.1 仿真條件
3.1.1 太陽能陣列模型
“蒲公英I”無人機采用上單翼、雙尾撐、雙垂尾的常規布局,翼展6.15 m,分為左、中、右三段,均鋪設太陽能電池,有效鋪片面積1.875 m2。機翼中段的右半段與機翼右段串聯為右太陽能電池陣列(圖4),為右側電機供電;左端同理。
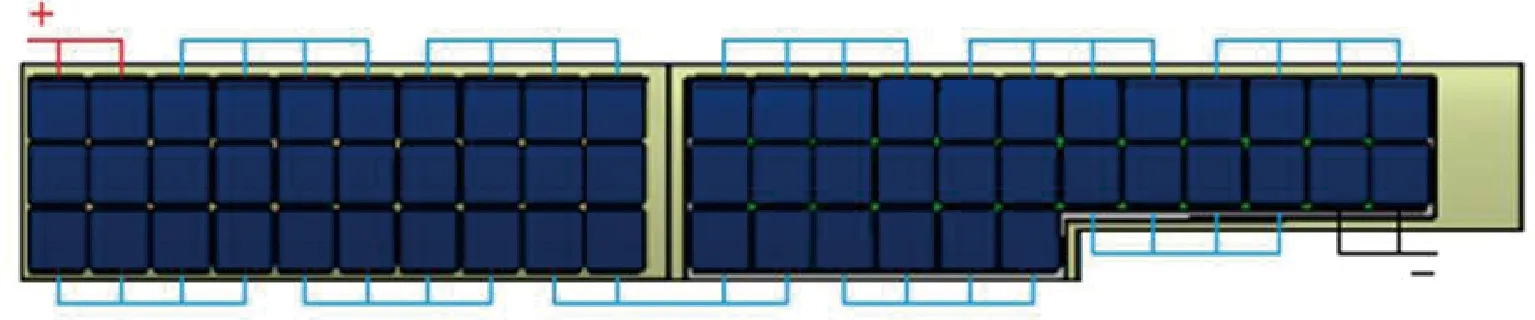
圖4 太陽能電池陣列連接示意圖Fig.4 Schematic of solar cell array connection
本文以右太陽能電池陣列為例,建立太陽能電池陣列模型。其中:太陽能電池沿機翼弦向串聯;相鄰兩串并聯,同時并聯一個旁路二極管,構成一個太陽能電池陣列單元;靠近翼根的單元記為PV1,由內向外進行編號,共計11個單元串聯在一起形成太陽能電池陣列。每個電池單元視為均勻光照,可通過改變不同單元的光照強度來模擬局部陰影情況。圖5為電池陣列仿真模型。
3.1.2 局部陰影模型
為了對比分析局部遮擋問題,設計了3個局部陰影模型,表2給出了對應模型的電池陣列光照情況。
3種光照情況下太陽能電池陣列的P-V特性曲線如圖6所示,其中:無陰影情況有一個全局最大功率點,最大功率為230.9 W;局部陰影情況1有2個功率極值點,功率極值分別為208.8 W和175.6 W;局部陰影情況2有3個功率極值點,功率極值分別為184.6 W、159.4 W和126.7 W;2種有陰影情況的全局最大功率點都在最左側。
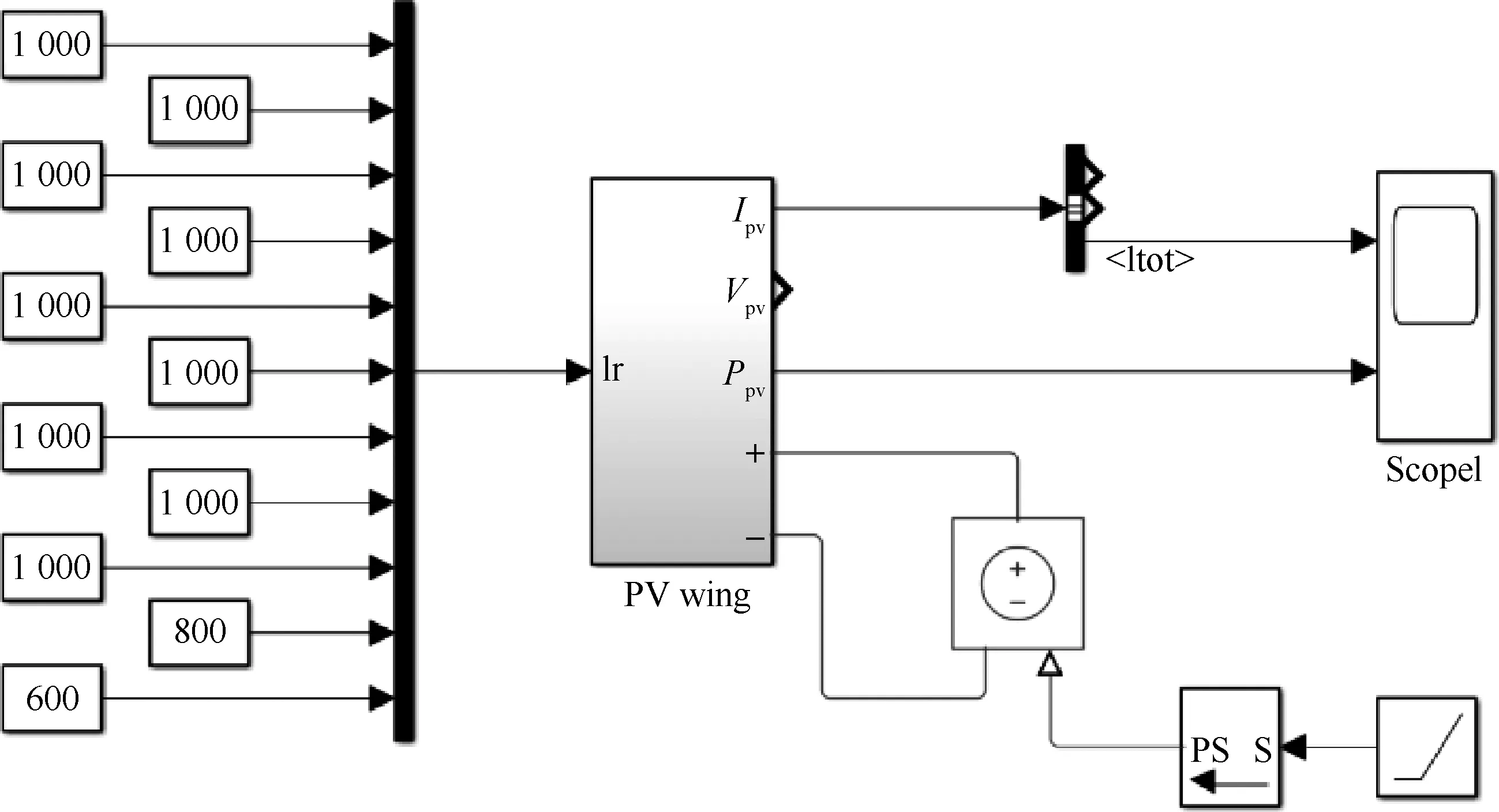
圖5 太陽能電池陣列仿真模型Fig.5 Solar cell array simulation model
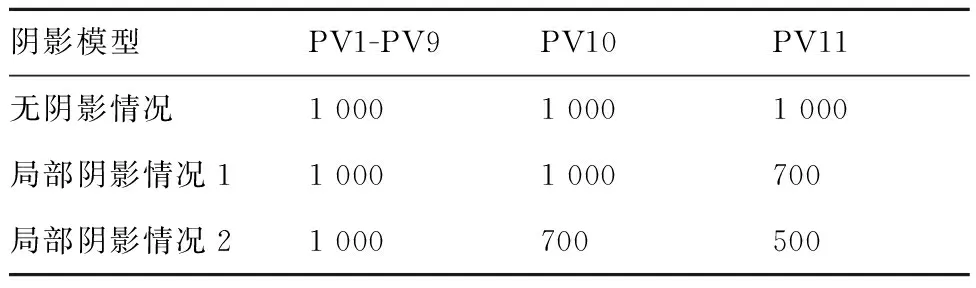
表2 太陽能陣列局部陰影模型光照強度
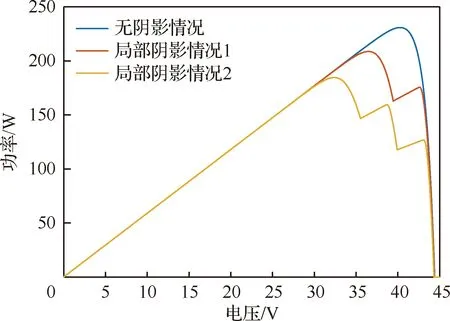
圖6 局部陰影模型下太陽能電池陣列P-V特性曲線Fig.6 P-V characteristic curves of solar cell array under partial shadow model
3.1.3 飛行任務剖面
取“蒲公英I”飛行實際數據作為飛行任務剖面。飛行航跡為具有4個航點的閉環矩形航線(圖7),長邊為790 m,短邊長度為300 m,飛行方向為逆時針按航點0-1-2-3順序飛行。飛行高度100 m,飛行空速14 m/s。圖8為飛行功率和高度變化曲線,總耗時1 070 s,包括地面滑跑(0~58 s)、等待起飛(58~282 s)、起飛爬升(282~403 s)、航點巡航(403~878 s)、下降降落(878~1 005 s)、地面滑跑(1 005~1 070 s)共6個階段。
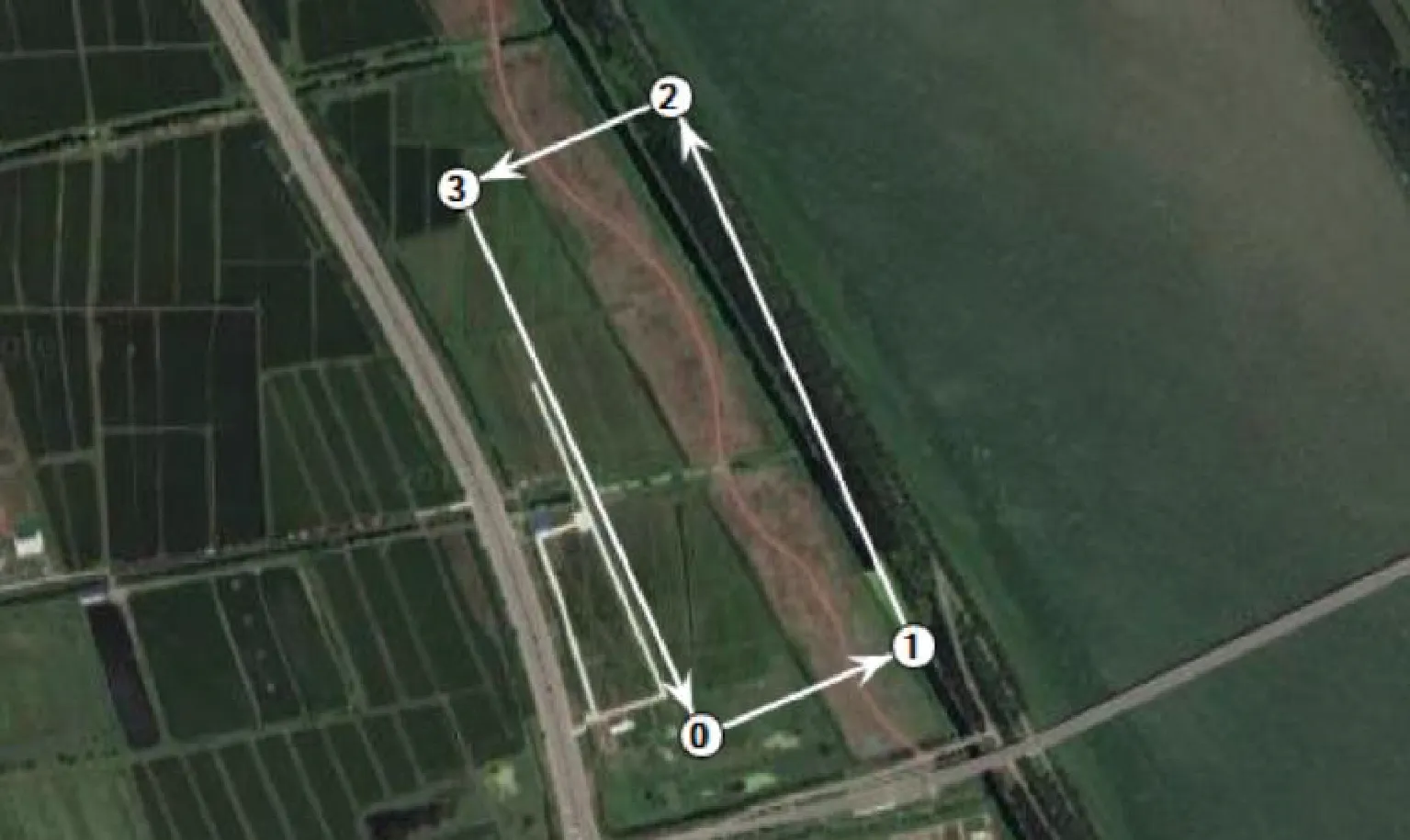
圖7 “蒲公英I”飛行航線Fig.7 "Dandelion I" flight route
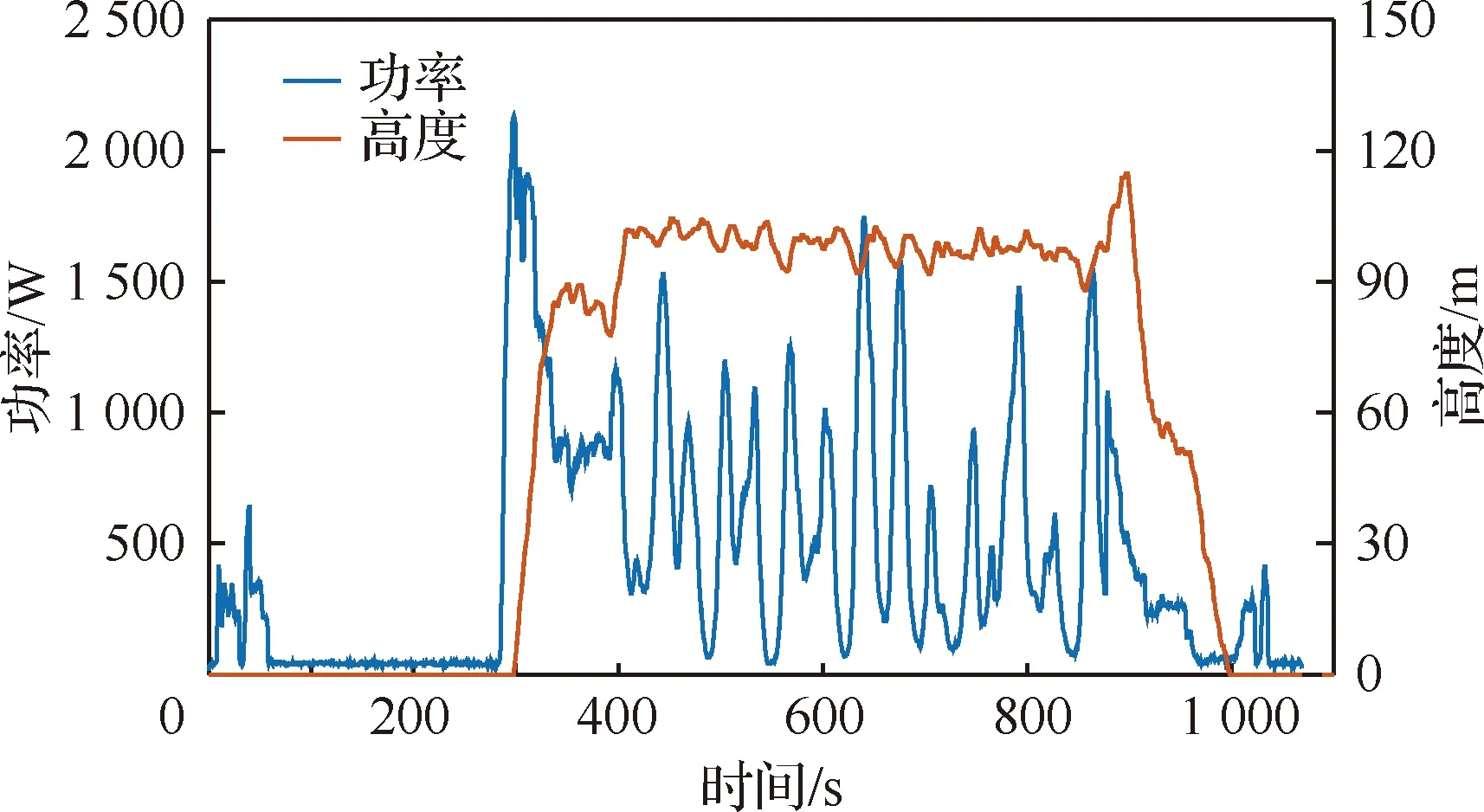
圖8 飛行功率、高度-時間曲線Fig.8 Flight power, altitude-time curves
本文以圖8所示功率需求曲線作為基本飛行任務剖面,在其中加入飛行過程中局部陰影情況:在轉彎過程中存在表2中局部陰影情況1所示的局部陰影情況,每次轉彎過程中持續15 s,存在局部陰影情況的轉彎共7個。假設當天光照強度為1 000 W/m2。
3.2 最大功率點追蹤仿真試驗
為了對比,分別采用增量電導法(Incremental Conductance, IC)、FA和MFA進行最大功率點追蹤的數學仿真和半實物仿真試驗。
3.2.1 數學仿真與分析
1) 仿真模型
圖9是MPPT控制系統仿真模型,主要包括:太陽能電池陣列、Buck-Boost變換電路、MPPT算法模塊、DC/DC控制模塊以及驅動模塊。其中:DC/DC變換器輸入電容為56 μF,輸出電容為100 μF,負載為2 Ω純阻性負載。DC/DC變換器控制模塊中采用經典PI控制方法,搭建電壓控制回路,Kp=0.014,KI=40。FA中:種群數量N=6,初始吸引度β0=1,步長因子α=0.02,光吸收系數γ=0.03;MFA中:PTH=13,θ=0.077,其余參數與FA保持一致。IC中:擾動步長為0.1 V。MPPT算法仿真步長為50 ms。
2) 穩態仿真
據調查和文獻資料記載,沙溝先后于1963年、1981年和2016年暴發過泥石流,除給金山鎮金獅村居民集中點和溝內居民多次造成嚴重的危害外,還對生態環境造成了嚴重的破壞。按泥石流災害危害性等級劃分表,該泥石流災害危害性等級為大型地質災害。
圖10為太陽能電池陣列在表2中3種光照情況下的仿真功率曲線。表3為采用不同算法的最大功率點追蹤仿真結果比較。可以看出:① 3種情況下,MFA和FA均能對太陽能電池陣列的最大功率點進行準確跟蹤,MFA的收斂時間均小于FA,且搜索過程中的功率波動較小;② 有局部陰影情況下,IC會被困于局部最大功率點,造成功率浪費。
3) 動態仿真
將3.1.2節的動態局部陰影模型加入MPPT控制仿真系統。其中,每種光照情況持續2 s,仿真時間共10 s。圖11為仿真功率曲線。可以看出:① MFA和FA都可以動態追蹤全局最大功率點,與FA相比,MFA的功率波動更小、收斂時間更短;② IC在出現局部陰影情況時,被困于局部最大功率點。
3.2.2 半實物仿真結果與分析
1) 試驗平臺
圖12為最大功率點追蹤半實物仿真平臺。其中,太陽能電池陣列由太陽能電池模擬器實現,作為MPPT控制系統能源;采用可編程電子負載作為MPPT控制系統負載;將MFA、FA和IC分別嵌入MPPT控制系統硬件平臺,分別進行最大功率點追蹤試驗,對比3種算法在跟蹤速度和精度方面的差別。MPPT算法執行步長仍為50 ms。
2) 穩態試驗
圖13為太陽能電池陣列在表2中3種光照情況下的仿真功率曲線。表4為最大功率點追蹤方法的半實物仿真結果比較。可以看出:① 3種情況下,MFA和FA均能對太陽能電池陣列的最大功率點進行準確跟蹤,MFA的收斂時間均小于FA,且搜索過程中的功率波動較小;② 有局部陰影情況下,IC會被困于局部最大功率點,造成功率浪費;③ 半實物仿真結果與數學仿真一致,驗證了數學仿真模型的有效性。
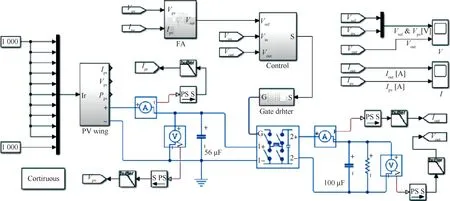
圖9 MPPT控制系統仿真模型Fig.9 Simulation model for MPPT control system
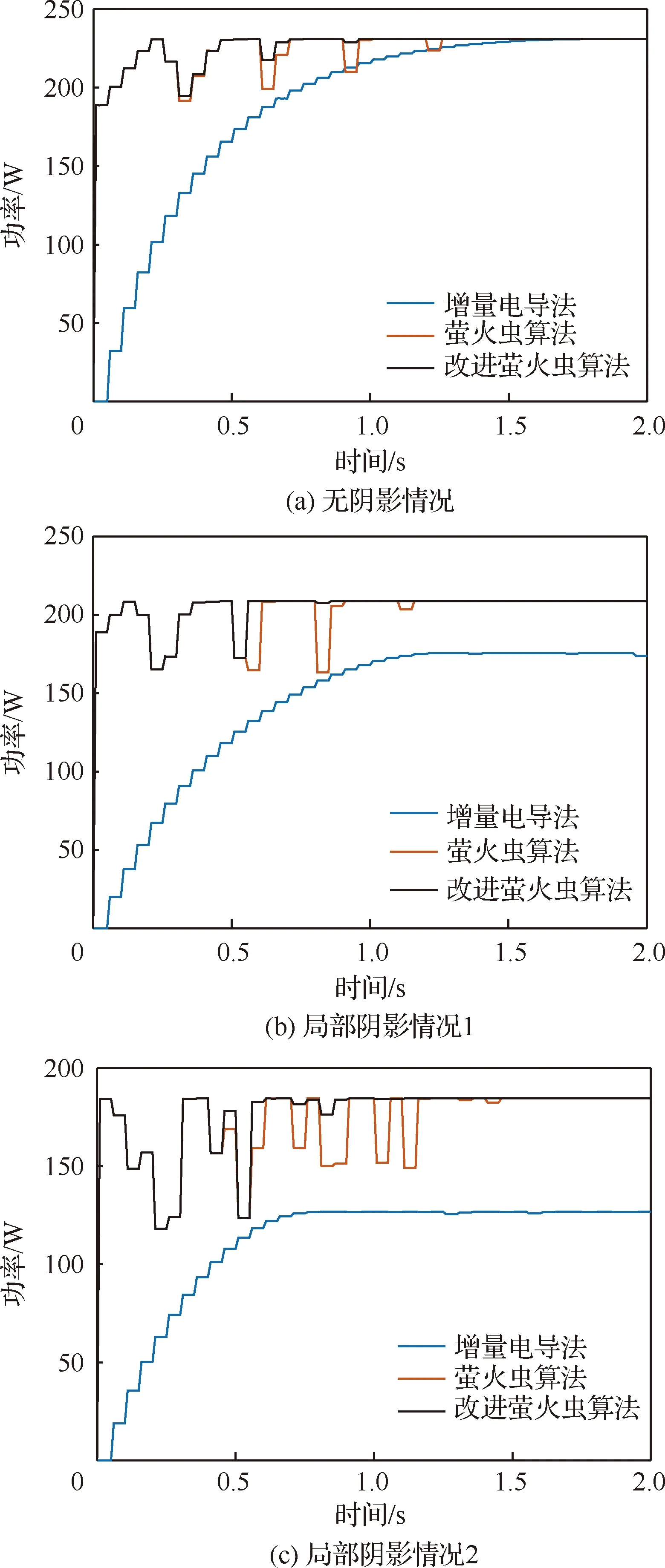
圖10 最大功率點追蹤穩態數學仿真功率曲線Fig.10 Maximum power point tracking static mathematical simulation power curves
表3 最大功率點追蹤穩態數學仿真結果對比
Table 3 Comparison of maximum power point tracking static mathematical simulation results
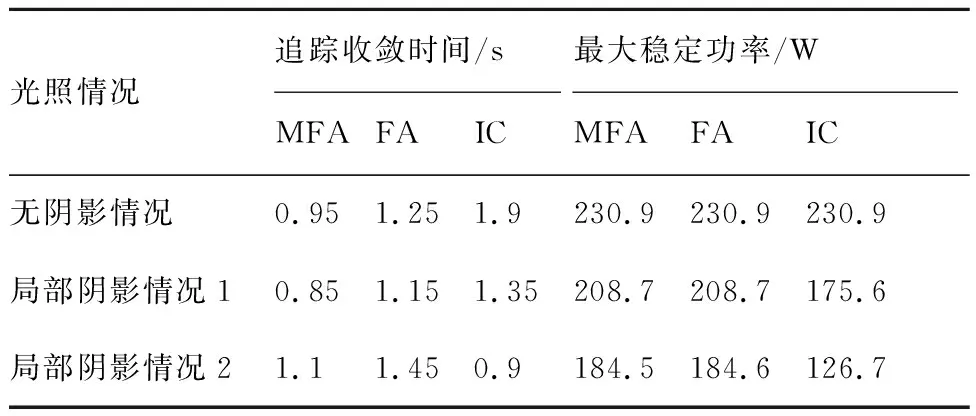
光照情況追蹤收斂時間/s最大穩定功率/WMFAFAICMFAFAIC無陰影情況0.951.251.9230.9230.9230.9局部陰影情況10.851.151.35208.7208.7175.6局部陰影情況21.11.450.9184.5184.6126.7
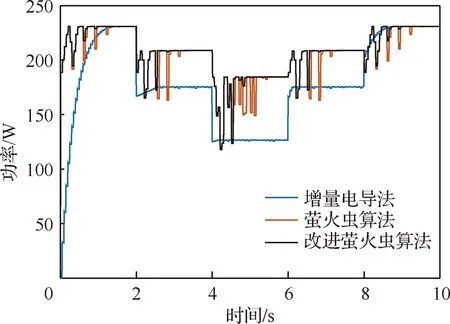
圖11 最大功率點追蹤動態數學仿真功率曲線Fig.11 Maximum power point tracking dynamic mathematical simulation power curves
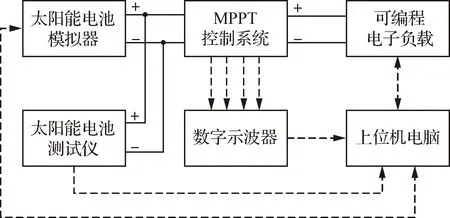
圖12 最大功率點追蹤試驗平臺Fig.12 Maximum power point tracking test platform
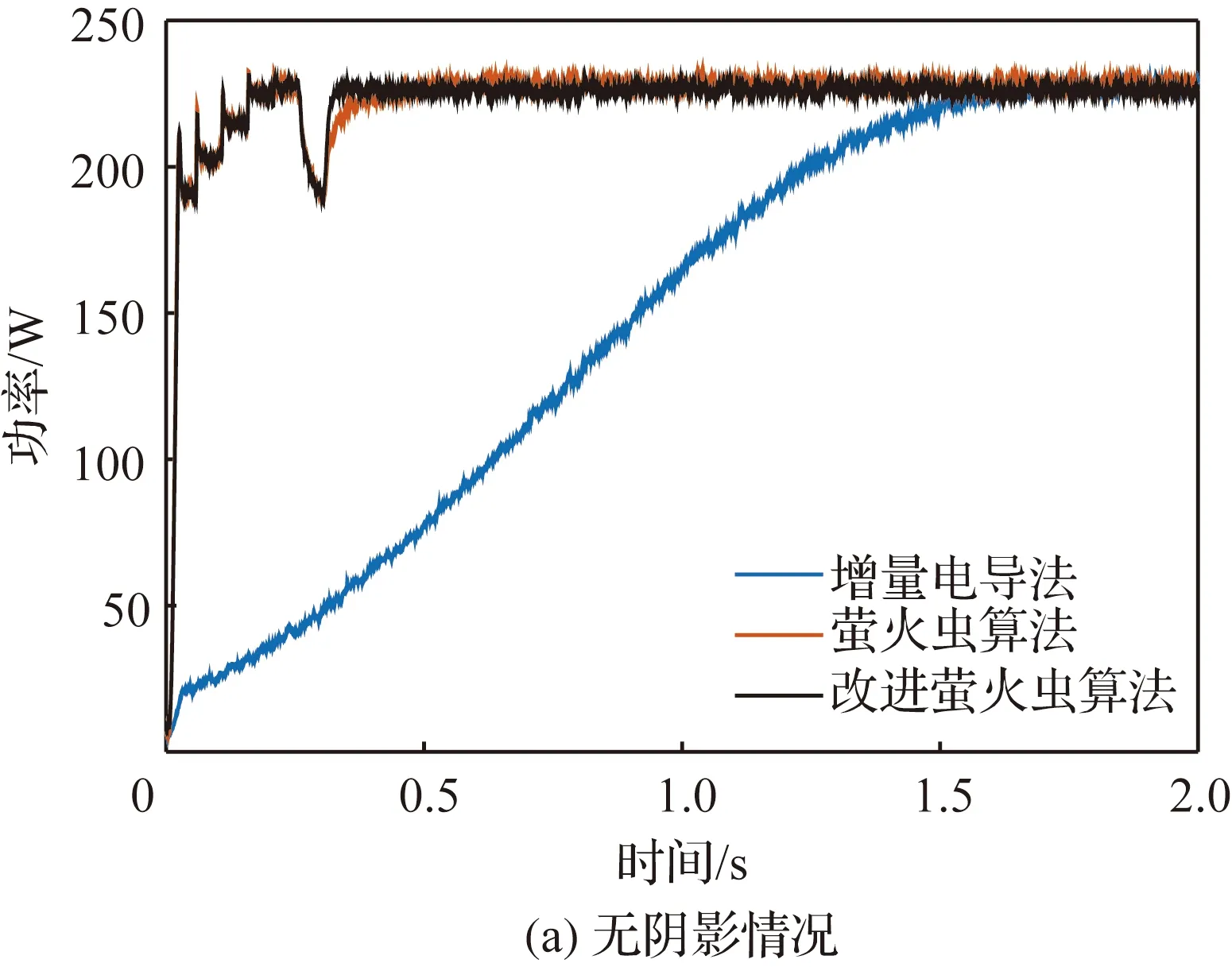
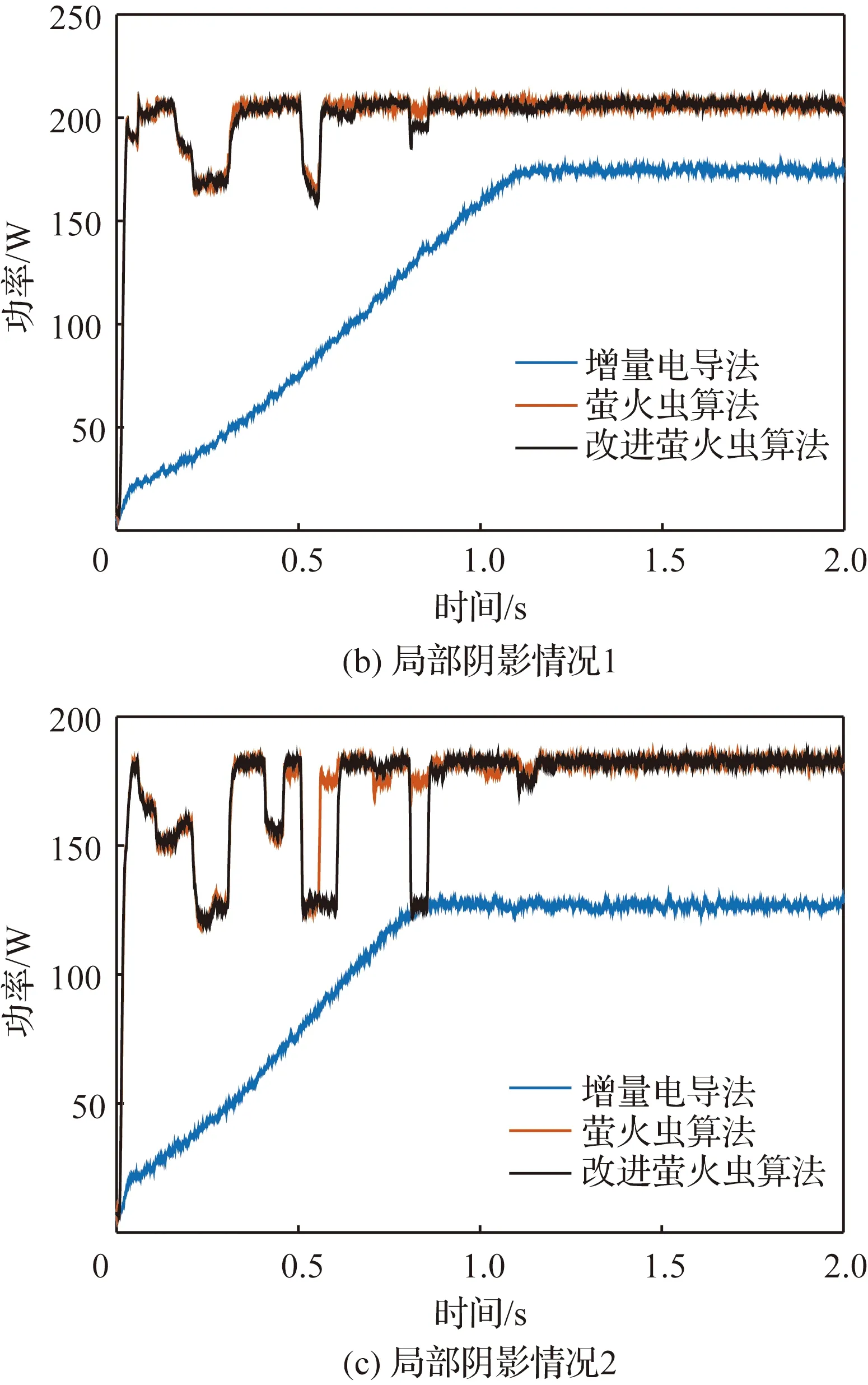
圖13 最大功率點追蹤穩態半實物仿真功率曲線Fig.13 Maximum power point tracking static semi- physical simulation power curves
表4 最大功率點追蹤穩態半實物仿真結果對比
Table 4 Comparison of maximum power point tracking static semi-physical simulation results
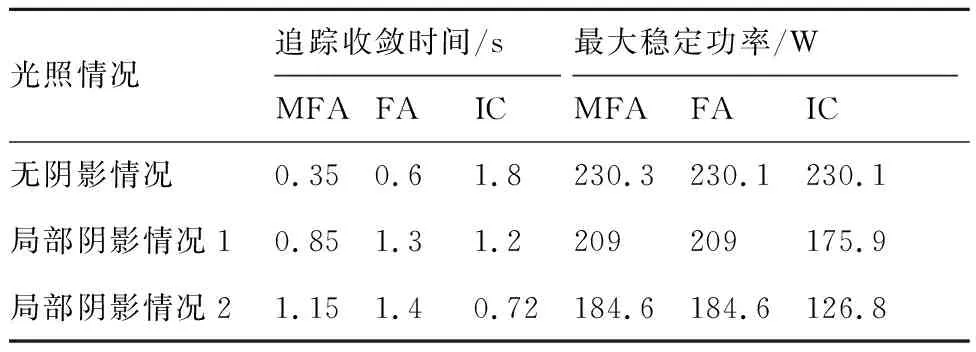
光照情況追蹤收斂時間/s最大穩定功率/WMFAFAICMFAFAIC無陰影情況0.350.61.8230.3230.1230.1局部陰影情況10.851.31.2209209175.9局部陰影情況21.151.40.72184.6184.6126.8
3) 動態試驗
將3.1.2節動態局部陰影模型加入半實物仿真平臺,每種光照情況持續2 s,仿真時間共10 s。圖14為半實物仿真功率曲線。可以看出:① MFA和FA都可以動態追蹤全局最大功率點,與FA相比,MFA的功率波動更小、收斂時間更短;② IC在出現局部陰影情況時,被困于局部最大功率點;③ 與數學仿真結果一致。
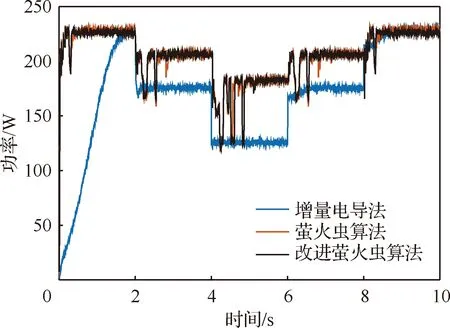
圖14 最大功率點追蹤動態半實物仿真功率曲線Fig.14 Maximum power point tracking dynamic semi-physical simulation power curves
3.3 混合能源控制仿真試驗與分析
“蒲公英I”無人機采用左右對稱的雙能源動力系統架構,本文以其右側混合能源動力系統為原型,基于3.2.1節MPPT仿真模型,加入飛行任務剖面需求功率,建立混合能源管理系統仿真模型,如圖15所示。本文采用容量為2.6 Ah的6S鋰聚合物電池,參數取值如表5所示。
在典型飛行任務剖面下,采用第1節給出的MFA和第2節給出的能源管理策略,對能源管理策略功率分配和能源狀態進行仿真。仿真中設置蓄電池初始電量為80%,結果如圖16所示。可以看出:① 當需求功率高于太陽能電池最大功率時,太陽能電池以最大功率輸出,其余功率由蓄電池補充;② 均勻輻照情況下MFA能夠迅速搜索到最大功率點并維持輸出。當出現局部陰影情況時,MFA檢測到功率波動,重新開始搜索最大功率點,經短暫的功率波動后穩定在全局最大功率點輸出;③ 當系統剩余功率高于蓄電池最大充電功率時,限制充電功率為最大充電功率以保護蓄電池;④ 蓄電池電壓跟隨負載變化在24.15~24.83 V范圍內波動,蓄電池電流波動范圍為-4.65~34.5 A,電壓電流均處于正常區間內,未發生過充過放現象,蓄電池始終處于正常狀態健康運行。
為分析本文所提能源管理策略的適應性,保持典型任務剖面不變,在不同蓄電池初始電量(95%、80%、40%)情況下進行仿真研究,結果如圖17所示。
可以看出:① 在較高的初始電量狀態(95%)下,蓄電池僅放電不充電;② 當蓄電池初始電量處于中低狀態(80%和60%)時,在無人機待機過程中SOC曲線存在明顯的上升即充電過程;③ 在無人機飛行過程中,不同初始電量的SOC曲線隨需求功率波動,具有較好的一致性。表明本文設計的狀態機能源管理策略在不同初始電量狀態下能夠有效管理混合能源系統的功率流,在充分利用太陽能功率的同時保持蓄電池處于健康運行狀態,具有較強的適應性。
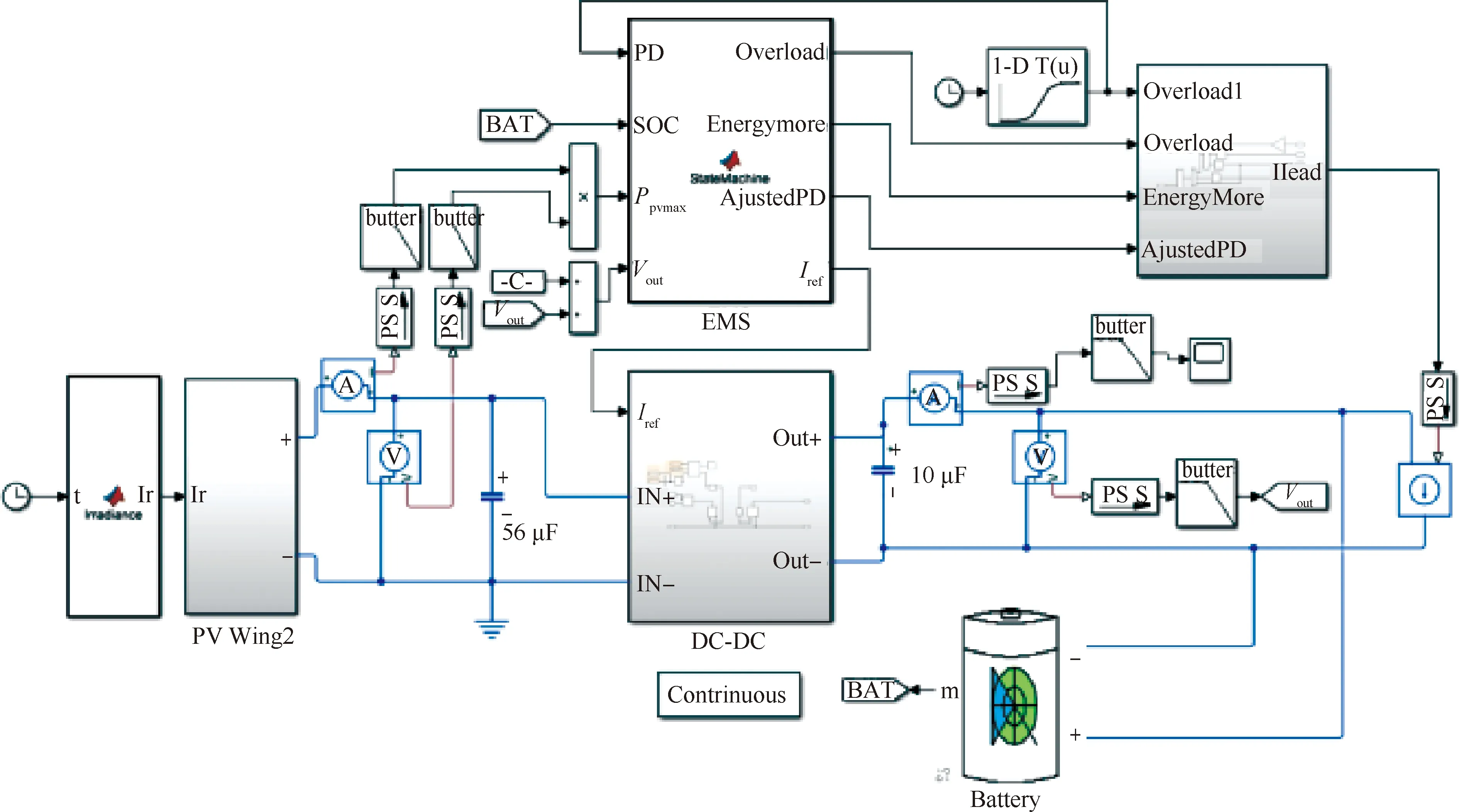
圖15 混合能源管理策略仿真模型Fig.15 Hybrid energy management strategy simulation model
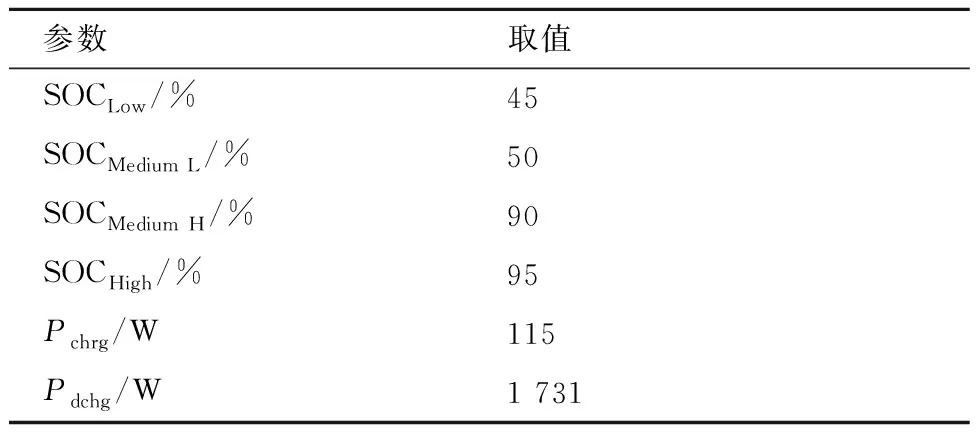
表5 蓄電池參數取值Table 5 Lithium battery parameter values
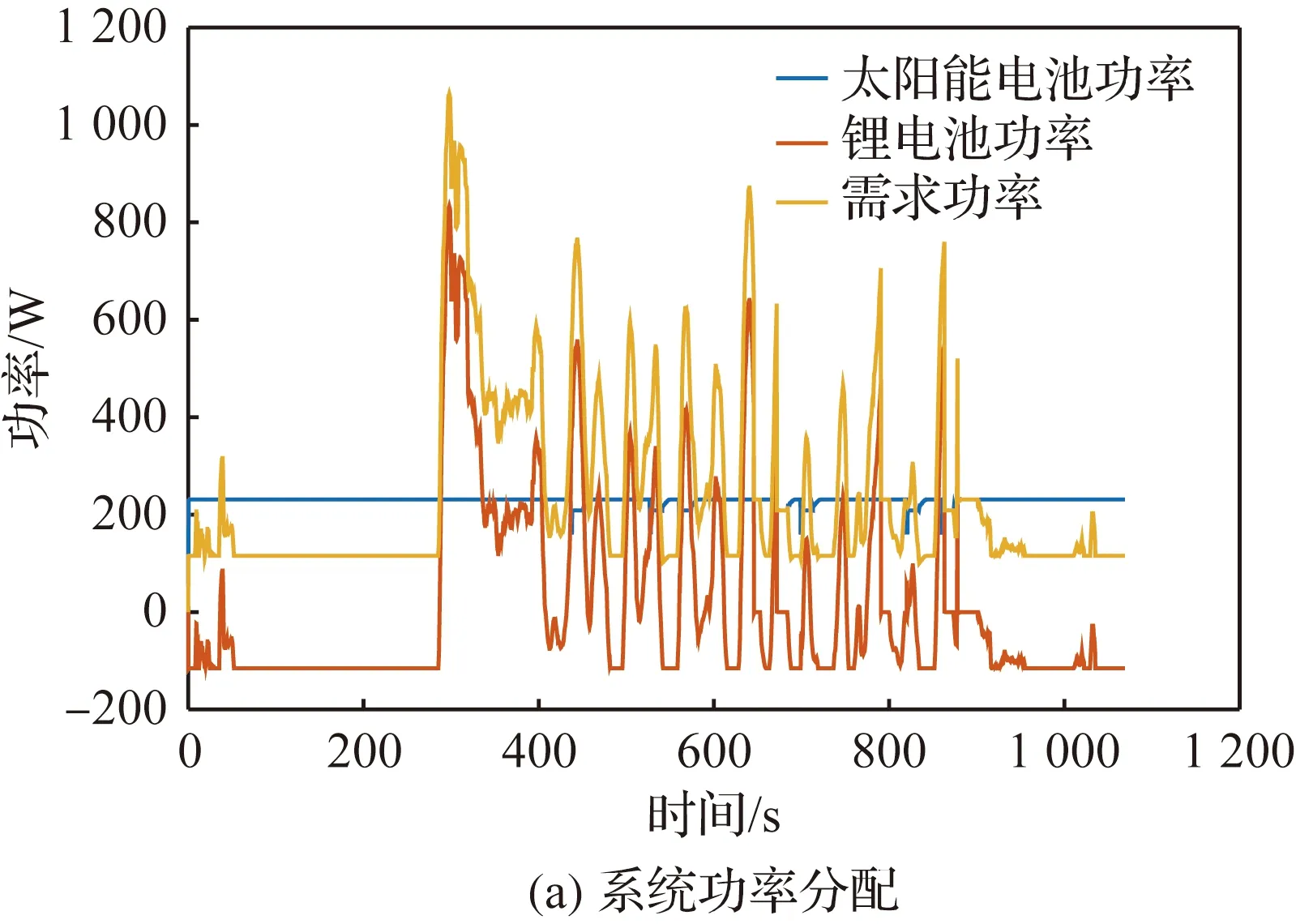
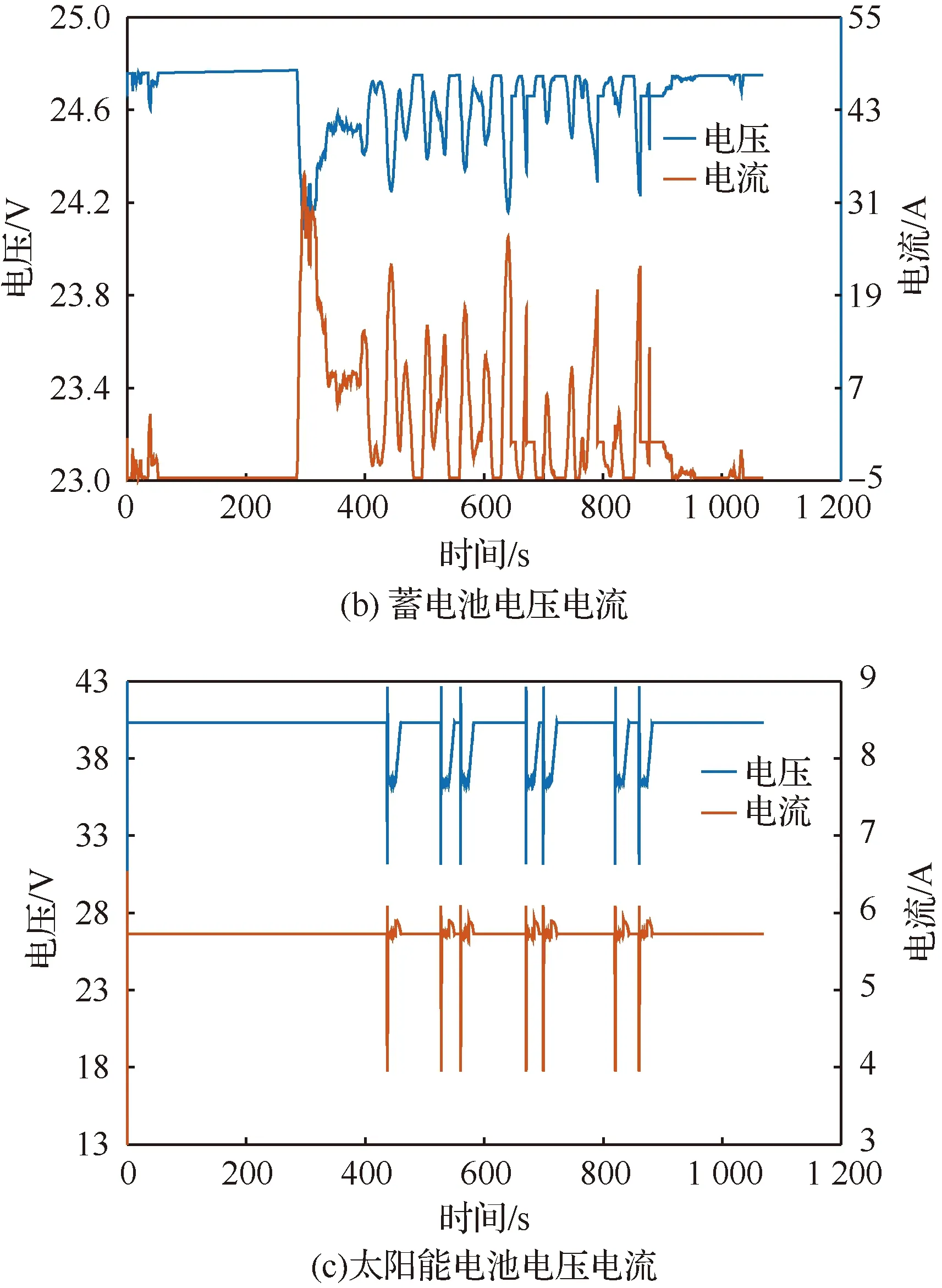
圖16 功率分配和能源狀態Fig.16 Power distribution and energy status
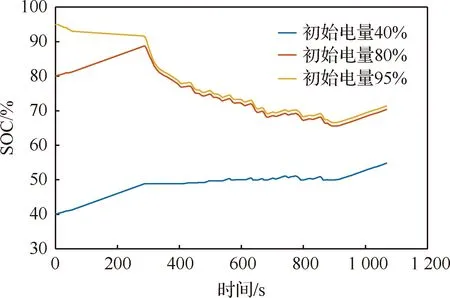
圖17 不同初始電量情況SOC變化曲線Fig.17 SOC curves of different initial power conditions
4 結 論
本文針對太陽能無人機太陽能電池局部陰影問題,對太陽能電池全局最大功率點追蹤算法和混合能源管理展開了深入的研究,所得結論如下:
1) 所提改進螢火蟲算法與螢火蟲算法相比,收斂時間明顯提高。
2) 基于改進螢火蟲的算法MPPT方法在不同光照情況下均能實現全局最大功率點的準確跟蹤,且功率波動小。
3) 對于含有局部陰影的飛行剖面,提出的改進螢火蟲算法和所設計的混合能源控制規則,可以有效實現太陽能電池和蓄電池的功率分配,且蓄電池電量變化處于合理范圍。