航天器末端攔截自適應博弈策略
2020-04-15 09:28:06王淳寶孫兆偉孫楚琦
宇航學報 2020年3期
關鍵詞:策略
王淳寶,葉 東,孫兆偉,孫楚琦
(哈爾濱工業大學航天學院,哈爾濱 150001)
0 引 言
衛星作為空間力量重要組成部分,具有傳送信息量大、不受地形限制等優點,可以為指揮者制定策略提供戰場信息,也可為導彈等作戰單元提供導航制導信息[1]。因此為了奪取戰時空間信息主動權,對敵方衛星實施攔截打擊有著重要意義。
針對攔截問題,文獻[2-3]基于滑模面進行了導彈的制導與控制一體化設計,仿真表明了采用所設計的控制方法能夠滿足攔截要求。賴超等[4]考慮目標進行機動時的攔截策略,基于動態面和擴張狀態觀測器對制導與控制進行了設計,仿真分析了目標在進行正弦機動時,采用相應的控制策略能夠實現對目標的精確攔截。雖然上述文獻對目標攔截問題均進行了研究,但其中的目標并未進行機動或未采取最優的機動策略。而隨著科技的發展,目標獲取空間戰場信息能力的提高,可以對戰場情報進行分析,并做出相應的決策,采取最優躲避策略以應對不同的戰場態勢,此時攔截策略的設計需要考慮目標機動的最優性,傳統的攔截方法已不能滿足攔截要求,單邊攔截策略已不再適用。此外,隨著衛星任務的復雜化及多樣化,目標的被動逃逸可能會影響其任務的實施,此時為了避免具有重要價值的衛星被攔截,附近通常會存在伴飛星進行主動防御,這種態勢無疑增加了攔截難度,對空間攔截提出了更高的要求,因此研究存在防御器的多邊攔截策略有著重要的意義。
針對多邊攔截問題,學者們已經進行了充分的研究。史明明[1]分別考慮了衛星遠程攔截、近程攔截時的控制策略,遠程攔截時建立了考慮J2攝動的動力學模型,近程攔截以CW方程為模型,基于微分對策分別給出了相應的最優控制策略。Horie等[5]基于飛機三維動力學模型,通過微分對策理論將攔截問題轉化為兩點邊值問題,通過仿真分析,最優飛行軌跡分為偏離垂直平面以及垂直面內運動的兩個階段。Shinar等[6]考慮二維平面攔截,且離散控制的情況,設計了攔截器在有限步數內成功攔截目標的最優控制策略。當攔截器動力學模型較復雜時,通過微分對策理論會得到非線性強耦合的兩點邊值問題方程組,一般難以求解。文獻[7-8]給出了一種求解兩點邊值問題的方法,即半直接配點法:將整個控制過程離散化,分別對每段進行優化設計,以得到完整的控制規律,該方法可以有效地求解兩點邊值問題。
當攔截器距離目標較近時,攔截過程進入末端攔截,此時攔截器利用自身的敏感器可以獲得精度較高的目標信息,從而實現精確攔截。針對末端攔截問題,Prussing等[9-10]應用主矢量理論分別研究了多脈沖逃逸策略以及攔截策略。文獻[11]考慮航天器攔截目標后返回原軌道的情況,通過在目標函數中引入一個參數k對路徑進行約束。Stupik等[12]基于CW方程,應用最大值原理求解攔截控制問題,對于開環解應用粒子群優化方法進行求解,閉環解應用Kriging方法求解,其中的Kriging方法是插值和外推相結合的方法,是一種狀態反饋控制器。Gutman等[13]在雙積分動力學模型的基礎上,以終端相對距離為指標建立了攔截器與目標的控制策略,并分別給出了在極坐標、球坐標下的策略形式。文獻[14-15]在給出攔截器與目標的控制策略的基礎上,建立了關于攔截剩余時間的一元四次方程,以求解終端攔截時間,并討論了方程的分叉現象。文獻[16]討論了攔截過程中角度測量存在噪聲的情況,通過狀態觀測器實現對角度的估計,再將其應用于控制策略。
對于三星博弈問題,Garcia等[17-18],Pachter等[19-20]假設攔截器、防御器與目標三者的速度大小不變,因此三者運動軌跡為直線,應用微分對策求解最優飛行路徑角,經過進一步分析,三者軌跡覆蓋區域為阿波羅尼圓,簡化了求解過程。文獻[21]以簡單的雙積分系統為模型,研究了攔截器、目標和防御器三者的追逃控制策略,同樣對終端攔截時間進行了求解,仿真表明了過短的攔截時間不能實現對目標的攔截。
雖然對于航天器末端攔截問題已經存在較多的研究,但大多局限于攔截器與目標的雙星博弈。對于三星博弈問題,大多局限于針對簡化模型進行研究,與實際情況偏差較大。此外,對于不同博弈態勢,終端攔截時間作為博弈策略參數,其設定具有隨機性,導致策略自適應性較差。本文針對具有防御器的三星博弈末端攔截問題進行研究,由于各航天器之間利益對立,符合博弈思想,因此采用微分對策理論進行求解,推導了各航天器的博弈策略,并提出了時間分析方程以計算終端攔截時間,提高策略的自適應性。
本文安排如下:首先建立了航天器末端攔截動力學模型。其次,討論了雙星博弈態勢,基于零控脫靶量推導了攔截器與目標的最優博弈策略,同時建立雙邊時間分析方程以消除終端攔截時間的隨機特性,將隨機終端博弈轉化為固定終端博弈。再次,將雙星博弈擴展為目標攜帶防御器的三星博弈,類似的方法推導了各航天器的分段博弈策略,同時修正雙邊時間分析方程以適應三星博弈態勢。最后,將建立的博弈策略、時間分析方程應用于三星博弈攔截,并進行了相應的仿真分析。
1 末端攔截動力學模型
在末端攔截過程中,攔截器與目標的相對距離較近,因此在攔截器附近建立參考衛星,如圖1,其中,O1為參考衛星,P為攔截器。設參考衛星運行在圓軌道,以參考衛星為原點,O1x軸沿著參考衛星地心矢徑方向,O1z軸沿著軌道角動量方向,O1y軸滿足右手定則,定義軌道坐標系O1xyz,在該坐標系下,攔截器相對參考衛星的動力學方程可以簡化為CW方程。

圖1 攔截器與參考衛星Fig.1 Interceptor and reference satellite
(1)
式中:x,y,z為攔截器相對參考衛星的位置,ω為參考衛星的軌道角速度,ux,uy,uz分別為攔截器的控制輸入。

(2)


由線性系統理論可得狀態轉移矩陣為
(3)
其中的子矩陣分別為[22]


2 雙星博弈攔截策略
若目標不攜帶防御器,則攔截過程呈現雙星博弈態勢,此時攔截器與目標的動力學方程均滿足CW方程,即
(4)

定義攔截器與目標的相對狀態
XPE=XP-XE
關于時間求導,并結合式(4)整理可得相對動力學方程
(5)
式中:C=B。
2.1 最優博弈策略設計
在攔截過程中,攔截器與目標圍繞攔截終端距離展開爭奪,因此只需考慮兩星的位置矢量[14],定義零控脫靶量ZPE(t)對系統進行降維處理
ZPE(t)=MΦ(tf,t)XPE
(6)
式中:M=[I3,03×3],I3為3×3的單位陣。
對式(6)求導,并綜合式(5)可得
M(ΦBUP-ΦCUE)=BPUP+CEUE
(7)
式中:tf為終端攔截時間,且BP=MΦ(tf,t)B=Φ12,CE=-MΦ(tf,t)C=-Φ12。
(8)

(9)

(10)
(11)
2.2 終端攔截時間的確定
由式(10)~(11)以及零控脫靶量定義式(6)可知,終端攔截時間是調整博弈策略的重要參數。選取不同終端攔截時間tf,將攔截器與目標的策略(10)~(11)代入式并積分,可得在不同攔截時間條件下,攔截器與目標相對距離的變化,如圖2所示。可以看出,當選取特定的攔截時間后,攔截器會在該時刻實現對目標的攔截,并不會提前攔截目標,因此,終端攔截時間的設定直接影響了博弈結果。

圖2 不同攔截時間下攔截器與目標相對距離的變化Fig.2 Relative distance between interceptor and target with different intercept time
但在文獻[1]和[23]中,終端攔截時間均直接給定,隨機性較大,對于不同博弈態勢,需要設定不同的攔截時間,自適應性較差。針對該問題,提出雙邊時間分析方程以確定終端攔截時間,達到消除攔截時間隨機性,提高策略自適應性的目的。
將攔截器與目標的博弈策略(10)~(11)帶入式(7)中得
(12)
定義攔截剩余時間tgo=tf-t,當終端攔截時間不變時,有dtgo=-dt,于是
(13)
積分式(13)得到零控脫靶量ZPE(tgo)隨剩余時間tgo的變化關系
(14)
定義ZPE(0)=l,其中l為攔截器的攔截半徑,對式(14)取范數并記為
(15)
此外,對于式(6)有
(16)
聯立式(15)~(16)兩式,可以得到關于剩余時間tgo的方程,即
(17)
3 三星博弈攔截策略
對于具有重要價值的目標,附近通常存在伴飛防御器,以保護其不被攔截[24-25],此時末端攔截會呈現三星博弈態勢,博弈過程更加復雜,攔截更加困難。針對該問題,需要重新設計航天器博弈策略,并對雙邊時間分析方程進行修正。
在三星博弈態勢下,攔截器、目標、防御器三星的運動均滿足CW方程,即
(18)

定義攔截器與目標的相對狀態XPE,以及攔截器與防御器的相對狀態XDP,對其求導,并結合式(18)整理得到相對狀態方程
(19)
(20)
式中:D=B。
3.1 分段最優博弈策略設計
與第2節類似,分別定義ZPE(t),ZDP(t)為攔截器與目標、防御器與攔截器的零控脫靶量
ZPE(t)=MΦ(tf1,t)XPE
(21)
ZDP(t)=MΦ(tf2,t)XDP
(22)
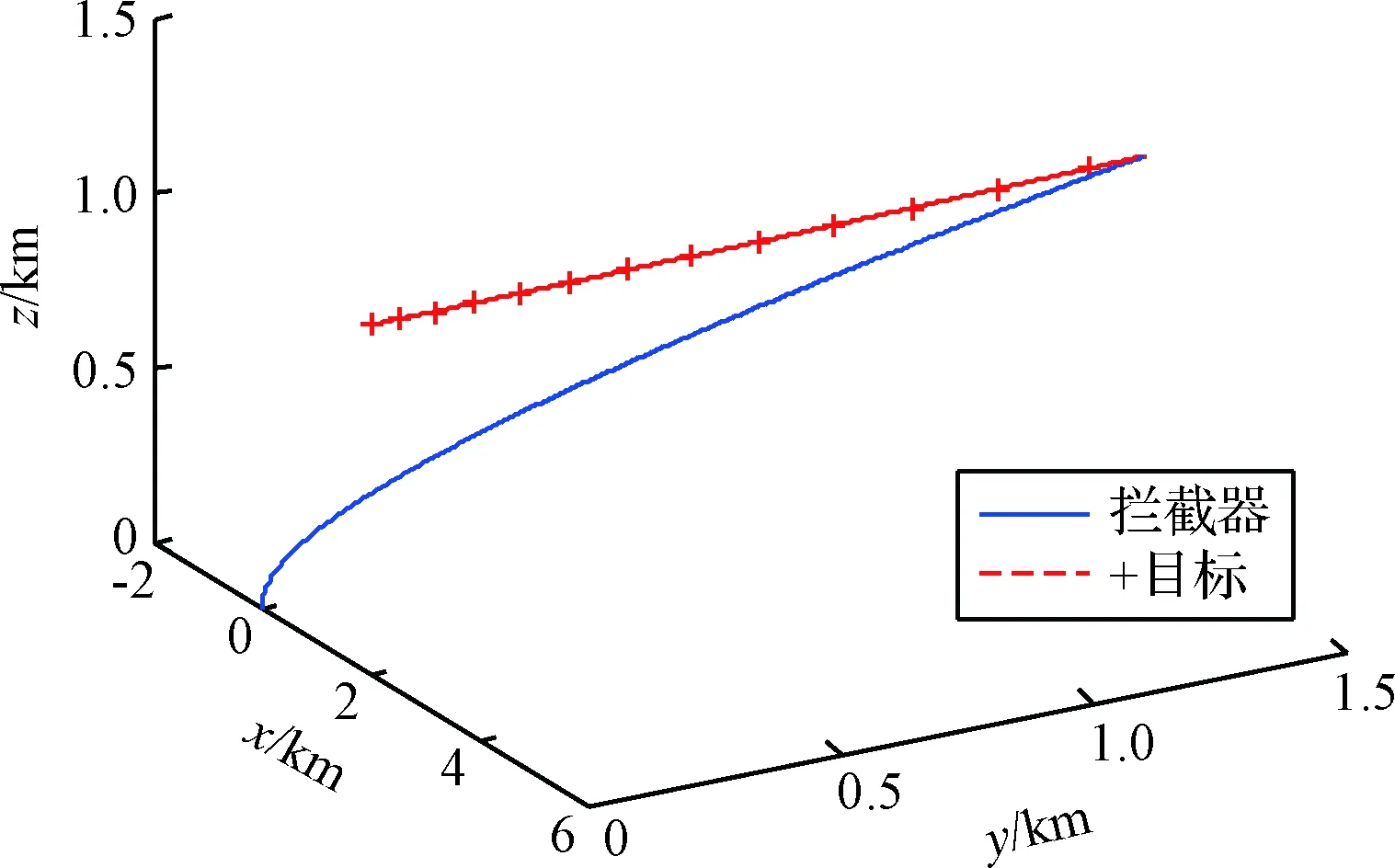
式中:tf2,tf1分別為防御器反攔截時間和終端攔截時間,且滿足tf2 對式(21)~(22)兩式求導,并結合式(19)~(20)兩式整理得 (23) BP2UP+DDUD (24) 式中:BP1=DD=MΦ(tf1,t)B=Φ12(tf1,t),BP2=CE=-MΦ(tf2,t)B=-Φ12(tf2,t)。 在三星博弈攔截對抗中,攔截器與目標利益對立,攔截器與防御器同樣存在利益對立關系,導致三星之間相互影響。為了降低該影響,以tf2作為博弈策略切換時間將其化為分段雙星博弈:第一階段為攔截器與防御器的雙星博弈,此階段攔截器只躲避防御器;第二階段為攔截器與目標的雙星博弈,此階段攔截器已成功躲避防御器,只考慮攔截目標。因此定義指標函數JPE,JDP分別為tf1,tf2時刻的相對零控脫靶量 (25) (26) (27) 對式(25)進行類似地推導并綜合上述分析,可得各航天器的分段最優博弈策略為 當t0 (28) (29) 當tf2 (30) UD=0 (31) 目標的博弈策略一直為 (32) 當攔截器采用策略(30)時,攔截器與目標之間的零控脫靶量變化如圖3中的Z1,攔截器與防御器之間的零控脫靶量變化如圖3中的Z4;當攔截器采用策略(28)時,攔截器與目標之間的零控脫靶量變化如圖3中的Z2,攔截器與防御器之間的零控脫靶量變化如圖3中的Z3。 圖3 不同策略下零控脫靶量的變化Fig.3 Changes of zero effort miss under different strategies 可以看出,當攔截器躲避防御器時,會導致攔截器與目標之間的相對距離變大,因此為了達到攔截目標的快速性,需要提前攔截器博弈策略的切換時間點,在t0~tf2之間定義躲避時間tf3,攔截器在t0~tf2時間內采取如下分段策略: 防御器與目標的策略不變,記此時三星的博弈策略為(*)。相應的攔截過程為:當t0 由于策略(30)會導致攔截器與防御器之間的相對距離減小,因此需要合理設定切換時間點tf3,以保證在t0~tf2范圍內攔截器不被防御器反攔截。 定義攔截器與防御器的安全距離m,在t0~tf2時間內各航天器采取相應的分段博弈策略(*),帶入式(24),同時令tgo2=tf2-t,由終端攔截時間tf2不變得到dtgo2=-dt,因此 當t0 (33) 當tf3 (34) 積分式(33)~(34),并分別記為 ZDP(tgo2)=g1(tgo2) (35) (36) 由攔截器不被反攔截得到tf2時刻的終端條件 (37) 同時,在tf3時刻有狀態連續條件 g1(tf2-tf3)=g2(tf2-tf3) (38) 綜合式(35)~(38)以及零控脫靶量的定義式(22)可解出最短躲避時間tf3。 為了驗證博弈策略及時間分析方程的有效性,分別對雙星博弈隨機、固定終端攔截,以及三星博弈隨機、固定終端攔截四種態勢進行仿真驗證。 初始條件如下:設攔截器、目標、防御器均在地球同步軌道附近運動,則將參考衛星選為GEO軌道上與其相近的衛星,軌道角速度為w=7.2722×10-5rad/s。攔截器的推力幅值為ρP=0.686 m/s2,目標的推力幅值為ρE=1/2ρPm/s2,防御器的推力幅值為ρD=5/8ρPm/s2。攔截器初始狀態為[0, 0, 0, -0.005, 0, 0.005],目標初始狀態為[2, 0, 1, 0, 0.005, 0],防御器初始狀態為[1, 0, 0, 0.005, 0, 0],位置單位為km,速度單位為km/s。設攔截器與目標之間的攔截距離為1 m,攔截器與防御器之間的安全距離為100 m。假設防御器反攔截時間tf2=200 s。 1) 雙星博弈隨機終端攔截,此時攔截空間只存在攔截器與目標。設終端攔截時間為200 s,圖4和圖5分別給出了該博弈態勢下,攔截器與目標的運動軌跡和相對距離的變化。可以看出,在終端攔截時間為200 s的情況下,攔截器可以實現對目標的攔截,但由圖2可知,設定攔截時間為200 s不是最快的攔截方案,即可以在更短的時間內攔截目標。 圖4 隨機終端下的雙星博弈運動軌跡Fig.4 Motion trajectory of two-satellite game with stochastic terminal time 圖5 隨機終端下的雙星博弈相對距離Fig.5 Relative distance of two-satellite game with stochastic terminal time 圖6給出了攔截器與目標的三維運動軌跡,圖7繪制了兩星相對距離的變化情況,可以看出,在126.28 s時,兩星的相對距離為0.7 m,滿足攔截條件。 圖6 固定終端下的雙星博弈運動軌跡Fig.6 Motion trajectory of two-satellite game with fixed terminal time 圖7 固定終端下的雙星博弈相對距離Fig.7 Relative distance of two-satellite game with fixed terminal time 3) 三星博弈隨機終端攔截,即博弈空間存在攔截器、目標與防御器。此時的攔截時間、躲避時間均是隨機變量,需要人為設定。 圖8繪制了在不同躲避時間下,攔截器與目標終端距離隨攔截時間的變化情況,此時暫不考慮攔截器是否被防御器反攔截。可以看出,隨著躲避時間的增加,攔截目標所需時間也相應地增加,因此在博弈過程中,為了快速攔截目標,躲避時間不應過長。 圖9繪制了在不同攔截時間下,攔截器與防御器最短距離隨躲避時間的變化情況,類似地,此時暫不考慮是否成功攔截目標。可以看出,攔截器與防御器最短距離與躲避時間之間呈現非線性關系,而且終端攔截時間對躲避時間也會產生影響,當設定攔截時間大于300 s時,攔截器不被反攔截至少需要15 s,但當攔截時間設定為200 s時,相應的躲避時間只需6 s左右,因此在博弈開始前,終端攔截時間與躲避時間應合理地進行設定,以達到最優攔截狀態。 圖8 攔截器與目標終端距離Fig.8 Terminal distance between interceptor and target 圖9 攔截器與防御器的最短距離Fig.9 Minimal distance between interceptor and defender 若不采用時間方程計算攔截時間與躲避時間,為了保證成功攔截目標且不被反攔截,攔截器通常會選取較大的攔截時間,相應的躲避時間也會較大。這里選取攔截時間tf1=500 s,躲避時間tf3=50 s進行仿真,此時攔截器、目標和防御器的三維運動軌跡如圖10,圖11給出了三星之間的相對距離隨時間的變化規律。 從圖11中可以看出,博弈過程中攔截器與目標之間的相對距離峰值較大,雖然最后成功攔截,但消耗了較多的時間,攔截效率較低。同時攔截器與防御器之間的最短相對距離為140 m,有被反攔截的風險。由圖8,圖9可知,相比于選取較大的攔截時間與躲避時間,存在著更優的時間選取方案。 圖10 隨機終端下的三星博弈運動軌跡Fig.10 Motion trajectory of three-satellite game with stochostic terminal time 4) 三星博弈固定終端攔截。此時通過時間分析方程得到終端攔截時間tf1=200 s,躲避時間tf3=8 s。相比于2)的雙星博弈固定終端攔截,終端攔截時間明顯增加,防御器的引入直接減慢了博弈速度。相比于3)的三星隨機終端博弈,時間方程可以計算得到圖8,圖9中最佳的時間選取方案,此時的攔截方案更優。 圖12、圖13分別給出了三星的運動軌跡以及相對距離的變化情況。可以看出,攔截器與目標的終端距離為1 m,滿足攔截條件。此時攔截器與防御器之間的最小相對距離為190 m。與3)的三星隨機終端博弈相比,8 s的躲避時間就可以保證攔截器不被防御器反攔截,明顯縮短了躲避時間,節約了攔截成本,提高了攔截效率。 圖12 固定終端下的三星博弈運動軌跡Fig.12 Motion trajectory of three-satellite game with fixed terminal time 圖13 固定終端下的三星博弈相對距離Fig.13 Relative distance of three-satellite game with fixed terminal time 本文研究了航天器末端攔截博弈問題,基于微分對策理論建立了多邊攔截策略,具有以下特點: 1) 針對策略中終端攔截時間的設定隨機性問題,創新性地提出了時間分析方程,將隨機終端博弈轉化為固定終端博弈,提高了攔截策略的自適應性。 2) 攔截空間中防御器的引入導致三星博弈態勢,以及攔截時間的延長,通過博弈策略的切換將其化為分段雙星博弈,降低了攔截難度。 3) 針對不同博弈態勢進行仿真,結果表明應用所建立的博弈策略,攔截器在不被防御器反攔截的情況下,能夠實現對目標的打擊,具有一定的工程價值。


3.2 終端攔截時間的分段確定


4 仿真校驗









5 結 論
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42中學生數理化·高一版(2020年3期)2020-04-21 08:03:20中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10數學大世界(2018年1期)2018-04-12 05:39:14幸福(2017年18期)2018-01-03 06:34:53中國衛生(2016年8期)2016-11-12 13:26:50