某型直升機懸停時自動上升現象分析與排除
2020-04-12 13:13:55曹永輝李晶吳宏宇卓偉偉
航空維修與工程 2020年10期
關鍵詞:分析
曹永輝 李晶 吳宏宇 卓偉偉
摘要:某型直升機在試飛懸停時,在無施加操縱輸入時出現自動上升現象。通過分析旋翼和操縱系統原理,查列故障樹,對涉及的有關部件進行檢查、驗證、排除,確定了引發該現象的原因,確保了飛行安全。
關鍵詞:直升機;懸停;自動上升;分析
Keywords:helicopter;hover;automatic ascent;analysis
0 引言
一架某型直升機C檢修理后試飛過程中,在無人為操縱介入的狀態下出現懸停自動上升的現象。
現象描述:直升機在低高度、有地效的狀態下,進入懸停并保持穩定后,飛行員松開對槳距桿的控制,自動駕駛儀高度通道未接通,懸停高度呈現波動狀態,且有懸停高度自動上升的趨勢,期間與總距操縱并聯的CLP傳感器輸出無變化,后由飛行員人為操縱槳距桿,上升情況停止;脫離地效后,直升機采取同樣的操縱方式懸停保持一段時間后,直升機高度由波動轉為自動上升,期間與總距操縱并聯的CLP傳感器讀數無變化,后由飛行員人為操縱槳距桿,上升情況停止。
使用故障樹形式對該特殊現象進行分析,解析原理并給出調試方法,是本文研究探討的目的。
1 該型直升機旋翼操縱系統構成原理
該型直升機屬于單旋翼帶尾槳的直升機,其操縱系統包括縱向、橫向、航向和總距操縱。操縱系統的部件主要由駕駛艙內的駕駛桿、總距桿、腳蹬,操縱箱組件(四通道舵機、聯動機構、相位儀、混合裝置)以及主助力器、自動傾斜器、尾助力器及拉桿、搖臂和鋼索等組成,如圖1所示。
直升機在總距操縱過程中,飛行員改變槳距桿的位置,由橫軸和拉桿傳遞到操縱箱,經過串聯在系統內的舵機和相位儀作用,通過變距混合裝置使傳動平臺上的拉桿向助力器輸入操縱信號,帶動自動傾斜器上下滑動,機械聯動至旋翼槳轂改變槳距角;同時與總距聯動的CLP傳感器因槳距桿位置變化,產生信號傳遞至發動機電調,發動機功率同步變化匹配槳距角變化,使直升機實現上升或下降動作。
2 故障樹
該機試飛過程中,當直升機進入懸停并保持穩定后,飛行員將手離開槳距桿,自動駕駛儀高度通道未接通,在無操縱介入的狀態下,直升機出現自動上升的現象,后飛行員人為控制槳距桿,上升情況停止。
在自動上升高度期間,通過駕駛艙綜合顯示器觀察判讀,與總距聯動的 CLP傳感器數值無變化,發動機扭矩、旋翼轉速等參數輕微波動。
根據上述現象,分析列出圖2所示故障樹。
3 針對現象開展的驗證工作
直升機自動上升現象出現后,依據故障樹分析,對相關系統部附件進行檢查,并開展多個場次的調整試飛,以期找到原因。
1)舵機檢查
該型機操縱系統配裝的舵機為四通道分離式電液舵機,起電液轉換和液壓放大作用,外場使用中故障率高,對操縱系統影響較大,故首先對舵機進行檢查。
在試驗臺上對該機舵機進行校驗,對總距通道伺服閥、配平閥和開環裝置進行調整和更換,以排除因舵機性能不穩定造成的操縱線系漂移。
試飛中斷開舵機液壓,將舵機性能影響從操縱線系中屏蔽,故障現象未消失。
2)操縱線系安裝狀態檢查
考慮到總距操縱為機械聯動,安裝時存在異常間隙會影響直升機高度保持時的操縱精準度,故對該機整個操縱線系安裝狀態進行了檢查。復查主旋翼操縱線系數據和主槳轂安裝情況,復查與總距聯動的尾槳操縱線系、主旋翼操縱聯動組件及尾槳5°數據,復查水平測量/稱重情況,數據符合技術要求,未發現異常。
3)助力器檢查
該型直升機助力器串聯在操縱線系中,若助力器存在異常,會導致操縱不穩定。復查助力器分油活塞情況,助力器無內腔串壓,工作穩定。
4)操縱線系阻尼特性和摩擦力檢查及調整
為穩定直升機操縱性能,對該機的總距阻尼器和總距摩擦裝置進行微調,使總距操縱線系上的阻尼特性和摩擦力增大。
5)旋翼系統部件安裝狀態檢查
檢查該機主槳轂、自動傾斜器的安裝和連接,未發現異常間隙,后期更換主槳轂和自動傾斜器。
6)旋翼錐體和動平衡狀態調整
分析直升機懸停時穩定性的必要條件,對旋翼錐體進行了檢查和微調,后期對該機安裝的主旋翼重新進行動平衡調整和串件,未能改善自動上升現象。
7)飛控系統檢查
對飛控系統的飛控計算機、舵機放大器、離合傳感器、慣性測量部件、速率陀螺組進行校驗,未發現異常情況。在試飛過程中試驗性斷開自動駕駛儀,排除飛控系統故障的可能。
8)總距CLP傳感器檢查
總距CLP傳感器與操縱線系并聯,負責將機械操縱的角度轉化為電信號,傳遞至發動機電子調節器進行發動機油門控制,當CLP傳遞信號不穩定時,有可能導致發動機功率不穩定,從而產生懸停高度變化。
對該機CLP傳感器進行檢查、清洗,并對傳感器安裝支座進行加強,消除其安裝結構的彈性變形,以消除CLP傳遞信號不穩定的可能性。
9)發動機放氣活門調整
針對該機發動機特點,結合試飛時大氣溫度,在工藝規定范圍內,增大了發動機放氣活門關閉點轉速,懸停時自動上升現象產生變化,由10m高度懸停后自動上升轉變為10m高度能穩定懸停,20m高度以上出現自動上升,可見發動機放氣活門性能與該現象存在一定關聯。
10)與同型其他直升機的對比驗證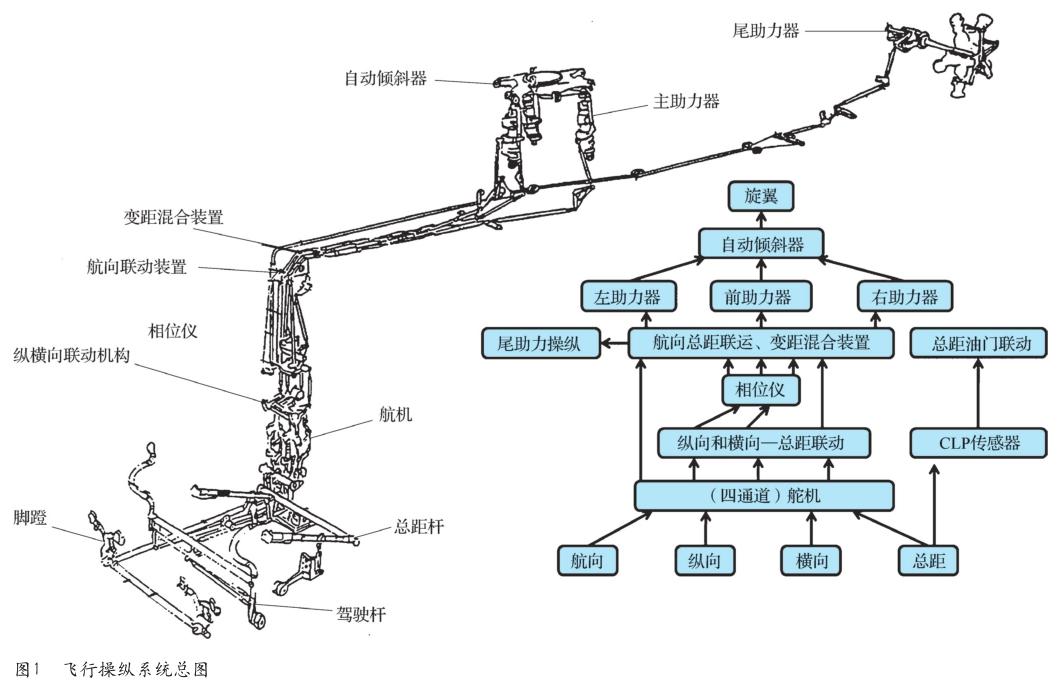
與另外兩架進入試飛階段的直升機進行對比飛行驗證。選取相同機型、相同重量、相同場次、相同操作流程,試飛時風速在1.5m/s以下,直升機進入穩定懸停,松開槳距后持續試飛時間不超過2.5min以控制重量變化,通過判讀飛參來分析懸停狀態。飛參記錄截取直升機進入懸停狀態(CLP穩定保持不變)的時間段,記錄直升機高度、扭矩、旋翼轉速和升降速度。
對3架機當天同時飛行時的飛參采集數據進行判讀分析,在無地效作用(20m以上)的情況下,3架機穩定懸停后均出現直升機自動上升現象。上升過程中顯示旋翼轉速存在波動,發動機扭矩伴隨旋翼轉速波動而變化,但該故障機上升較明顯。
由此判斷在無操縱介入的狀態下,長時間懸停過程中直升機出現自動上升的現象是客觀存在,不屬于特殊故障。
4 導致該現象的原因
從現象來看,在無人為操縱輸入情況下直升機自動懸停上升的根本原因是旋翼產生的升力大于直升機的重力。導致該現象的直接原因是該型直升機裝用的發動機功率裕度較大,在槳葉角受氣流等因素影響出現微小變化后,發動機輸出功率隨動變化。
參考飛參數據進行分析,自動上升過程中總距CLP數值無變化,發動機扭矩、旋翼轉速等參數輕微波動。當槳葉角向上時,發動機增加功率大于需求,當槳葉角減小時,發動機減小的功率小于減弱需求。
自動上升現象與旋翼轉速波動導致的發動機扭矩波動和發動機功率穩定性相關,發動機功率越穩定,自動上升現象越輕微,發動機扭矩波動越小,直升機懸停狀態越穩定。
為防止該型機飛行時出現不必要的意外情況,建議懸停飛行時如無必要,飛行員的手不能離開槳距桿。
5 結束語
在該型直升機的飛行手冊和維護手冊中,有關在無操縱介入的狀態下直升機出現自動上升的情況均無明確的相關說明,這屬于非正常操作下產生的現象。為了保證外場作訓使用,通過研究該現象產生的機理,以故障樹形式分析引發此現象的可能原因,分系統隔離問題因素,最終定位原因,消除了飛行員的疑慮。本文為分析該型直升機懸停自動上升現象提供了可靠經驗和技術支持。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
