某型飛機GPS自動駕駛模式轉彎偏航距大原因分析
2020-04-12 12:40:11周國棟
航空維修與工程 2020年12期
摘要:GPS導航儀已成為飛機導航的重要工具,因其功能強大、交聯眾多且軟硬件結合,故障判斷分析較為復雜。本文針對某型飛機GPS自動駕駛模式轉彎偏航距大的現象,對飛機GPS自動駕駛進行原理介紹,結合排故過程進行原因分析并得出結論,最后提出建議。
關鍵詞:GPS;偏航距;轉彎角度;轉彎半徑
Keywords:GPS;CDI;turning angle;turning radius
0 引言
某型飛機試飛時,飛行員在2101 I/O型GPS導航儀上設定三航路點飛行計劃(A→B→C)以驗證GPS自動駕駛功能。飛行時用GPS導航儀控制飛機自動導航,真空速為400km/h,具體飛行路線及現象如圖1所示:飛機按飛行計劃①進行GPS自動駕駛(轉彎角度90°),飛機以21°坡度轉彎,轉彎時偏航距最大1.3km,后可逐步修正;飛機按飛行計劃②進行GPS自動駕駛(轉彎角度120°),飛機以24°坡度轉彎,轉彎時偏航距最大2.5km,后可逐步修正;飛機按飛行計劃③進行GPS自動駕駛(轉彎角度140°),飛機以25°坡度轉彎,轉彎時偏航距最大3.5km,后可逐步修正。圖中A、B、C為設定的航路點,飛行員提出轉彎時偏航距過大。
1 飛機GPS自動駕駛原理分析
該型飛機由2101 I/O型GPS導航儀與駕駛儀耦合器、自動駕駛儀交聯進行自動導航,裝載的GPS導航儀為美國TRIMBLE公司產品,可進行IFR航線導航、終點導航和進場導航。該導航儀內置一個12頻道的接收機,用以計算位置和計算監測信號的完整度,定位精度優于15m,以三維形式計算緯度、經度和高度位置,利用全球定位系統衛星工作,完全自動,不要求任何初始化操作。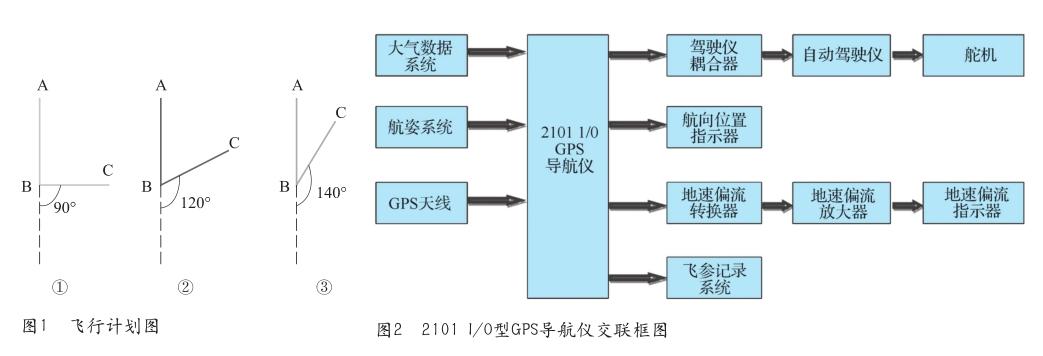
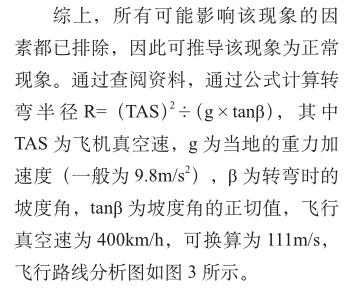
2101 I/O型GPS導航儀交聯框圖如圖2所示。GPS導航儀通過GPS天線接收衛星信號,計算出即時位置經緯度坐標,接收大氣數據系統傳來的真空速信號與航姿系統傳來的航向信號。GPS導航儀通過即時位置經緯度坐標、真空速和航向等參數,解算出地速、偏流角、風速、風向,再根據領航員設置的飛行計劃解算出偏航距,之后把偏航距發送給航向位置指示器供飛行員使用,并把地速角、偏流角發送給地速偏流轉換器。GPS導航儀輸出的ARINC 429數字式地速偏流信號轉換成模擬信號后被輸送給地速偏流放大器,經信號放大后傳送給地速偏流指示器供領航員使用。飛機設置為GPS自動駕駛模式后,GPS導航儀根據解算出的各參數、即時位置和設置的飛行計劃,計算出393mV/°的交流控制信號并發送到駕駛儀耦合器,駕駛儀耦合器將該信號解調為直流信號,經內部緩沖器、調制器處理后輸出給自動駕駛儀進行信號放大。自動駕駛儀依靠自動控制系統作用于飛機舵面以控制飛機在空中的姿態,它由三個較獨立的通道組成:傾斜、俯仰和航向。在穩定狀態(飛機水平直線飛行)下,自動駕駛儀控制飛機保持原飛行姿態不變,電位計無信號輸出,此時GPS導航儀也無控制信號輸出,副翼舵機不動,飛機保持直線飛行,飛機按圖1飛行;當飛到離轉彎點B的距離20s時(GPS導航儀按當前真空速計算),GPS導航儀輸出393mV/°的交流控制信號,經一系列信號傳輸、處理后控制飛機轉彎,控制信號在轉彎過程接近下一航線BC時逐漸減小,直至為零,飛機繼續直線飛行。
2 排故過程及原因分析
飛行后對故障現象進行分析,通過飛機自動導航轉彎原理可知導致飛機GPS自動駕駛模式轉彎偏航距大現象產生的主要因素包括:GPS導航儀本身性能、GPS導航儀交聯功能、駕駛儀耦合器性能、自動駕駛儀性能、機上相關線路、航姿系統組合陀螺水平等。
領航員飛行時單獨接通自動駕駛儀進行自動駕駛,各功能均正常,因此排除自動駕駛儀性能因素。GPS導航儀本身性能中對轉彎有影響的參數包括GPS定位精度和自動駕駛輸出,GPS導航儀返回內場后檢查GPS定位,搜星正常,可以搜到8顆衛星;分析其定位的經緯度坐標,比較經度緯度坐標與基準坐標,誤差在技術范圍內;檢查自動駕駛輸出,均滿足技術要求,可排除GPS導航儀本身性能因素。駕駛儀耦合器返回內場進行單件檢查、與GPS導航儀實際交聯檢查,均滿足技術要求,可排除駕駛儀耦合器因素。繼而分析航姿系統組合陀螺水平因素,如果組合陀螺平面與飛機平面之間存在傾斜角度,飛機在穩定狀態下將不是水平飛行而是帶坡度的飛行,飛機傾斜時機翼的升力向量也會發生傾斜(升力向量在飛機未傾斜時是垂直向上的)。由于飛機在外力矩作用下轉彎時會增大偏航距,需排查該因素,于是調整飛機使之處于水平狀態,地平儀指示器傾斜指示為0°,查看全姿態組合陀螺的水平儀氣泡,氣泡處于中間位置,傾斜誤差符合要求,排除了航姿系統組合陀螺水平因素。
從GPS自動駕駛原理分析,其輸出的地速偏流信號僅供領航員使用,地速偏流轉換器、地速偏流放大器和地速偏流指示器即使出現故障也只導致指示不正常,不影響飛機自動駕駛,因此可排除此三個產品及其線路故障。此外,航向位置指示器也僅為飛行員提供偏航距信號,即使出現故障也只導致指示不正常,不影響飛機自動駕駛,因此也可排除此航向位置指示器及其線路故障。進行大氣數據計算機機上交聯測試,地面通過微調手泵改變飛機靜壓管壓力,依次給定200km/h、400km/h、600km/h的真空速,將空地開關狀態設置為空中狀態(GPS內部設置OLEO為AIR),按NAV鍵,進入導航頁面,旋轉內旋鈕查看真空速,真空速誤差均不超過±10km/h,說明大氣數據計算機交聯測試正常,可排除大氣數據計算機及其線路故障。接著進行自動駕駛儀交聯測試,將空地開關狀態設置為地面狀態(GPS內部設置OLEO為GROUND),接通自動駕駛儀,使之處于改平狀態,旋轉內旋鈕,直到顯示屏上顯示“安裝和測試設備”頁,旋轉導航儀上外旋鈕,直到顯示屏顯示“輸入/輸出接口檢查”頁,將“衛星導航/自動駕駛儀”開關放在“衛星導航”位置,衛星導航指示燈亮,這時檢查駕駛桿處于中立位置;向右或向左轉動導航儀上小旋鈕,設置顯示屏上顯示的角度以5°為增量從左30°到右30°,在設置角度過程中,0°時駕駛桿處于中立狀態,其余角度時駕駛桿的轉動方向與設置的角度方向相同,從以上現象可知自動駕駛儀交聯測試正常,可排除自動駕駛儀及其線路故障。最后進行航向姿態系統交聯測試,通過航向基準系統給定航向0°到360°,按NAV鍵,進入導航頁面,旋轉內旋鈕查看航向,航向誤差均不超過1°,航向交聯測試正常。從以上分析,可排除GPS導航儀交聯功能及機上相關線路故障因素。
對飛機試飛的3條飛行計劃進行逐項分析:
1)飛機按圖1的飛行計劃①進行GPS自動駕駛,飛行時飛機以21°坡度轉彎,通過計算可得出轉彎半徑R=1112÷(9.8×tan21°)≈3275m。如圖3中①所示,飛機從D點開始,按虛線圓軌跡運動,在轉彎過程第 2次接近下一航線BC時逐漸自動修正,直至直線飛行。圖3①中D點為GPS導航儀設定的提前20s轉彎點,BD=111×20=2220m,可得出理論最大偏航距MN= R-BD=1055m,與實際飛機轉彎時最大偏航距1.3km接近。因轉彎坡度由零到最大需要一定的時間,且飛機飛行時側風等因素也會影響飛機轉彎時的最大偏航距,故按第1條飛行計劃飛行時的實際最大偏航距是正常值。
2)飛機按圖1的飛行計劃②進行GPS自動駕駛,飛行時飛機以24°坡度轉彎,通過計算可得出轉彎半徑R=1112÷(9.8×tan24°)≈2823m。如圖3②所示,飛機從D點開始,按虛線圓軌跡運動,在轉彎過程中第2次接近下一航線BC時逐漸自動修正,直至直線飛行。圖3②中D點為GPS導航儀設定的提前20s轉彎點,BD=111×20=2220m,可知OE=BD-EF= 2220-R×tan30°=590m,得出理論最大偏航距MN=R-OM=R-OE×COS30°≈2312m,也與實際飛機轉彎時最大偏航距2.5km接近,故按第2條飛行計劃飛行時的實際最大偏航距是正常值。
3)飛機按圖1的飛行計劃③進行GPS自動駕駛,飛行時飛機以25°坡度轉彎,通過計算可得出轉彎半徑R=1112÷(9.8×tan25°)≈2696m。如圖3③所示,飛機從D點開始,按虛線圓軌跡運動,在轉彎過程中第2次接近下一航線BC時逐漸自動修正,直至直線飛行。圖3③中D點為GPS導航儀設定的提前20s轉彎點,BD=111×20=2220m,可知OE=RDE= R-BD×tan40°≈2696-2220×0.839≈833m,得出理論最大偏航距MN=ON+OM= R+OE×cos40°≈3334m,也與實際飛機轉彎時最大偏航距3.5km接近,故按第3條飛行計劃飛行時的實際最大偏航距是正常值。
此外,AC-91-FS-2008-09《在航路和終端區實施RNAV1和RNAV2的運行指南》規定“對于正常運行,橫向航跡誤差或偏離應控制在相關程序或航路導航精度的±1/2以內,RNAV2為1.0nm,允許在程序或航路轉彎后出現最大為導航精度1倍的短暫偏離,RNAV2為2.0nm”。試飛中出現的最大偏航距為3.5km,即1.89nm,已滿足RNAV2的標準,因此從標準上分析也是正常的,在傳統導航的保護區內可安全飛行。
3 結論
飛機在GPS自動駕駛模式轉彎時,偏航距受飛行計劃轉彎角度、飛機轉彎半徑等因素影響,其中受飛行計劃轉彎角度影響最大,該角度越大偏航距越大,該角度較大時最大偏航距為3.5km,屬于正常現象。
不建議設置大轉彎角度飛行計劃,如確實需要,采用在飛行計劃中增加1個或2個過渡航路點方法,可有效減小最大偏航距。
參考文獻
[1] FREEFLIGHT. 2101 I/O GPS INSTALLATION AND CHECK MANUAL[Z].
[2] 李天文. GPS原理及應用[M].北京:科學出版社,2003.
[3] 劉基雨. GPS衛星導航定位原理與方法[M].北京:科學出版社,2003.
[4] 中國民用航空局飛行標準司. AC-91-FS-2008-09 在航路和終端區實施RNAV1和RNAV2的運行指南[S].
作者簡介
周國棟,高級工程師,主要從事機載無線電雷達修理技術研究工作。
