基于PROFINET IO的PLC與工業機器人通信研究
2020-04-10 06:52:28吳玉文朱曄夏偉
汽車實用技術 2020年5期
吳玉文 朱曄 夏偉

摘 要:在智能制造生產線中,工業機器人可以完成焊接、噴釉、裝配、碼垛等任務。總控通過PLC給工業機器人下發任務,并采集工業機器人的狀態信息。文章結合某條典型的智能制造生產線,從應用的角度,研究了基于PROFINET IO工業以太網的通訊方法,實現了S7-1200 PLC與多臺ABB機器人之間的通信。
關鍵詞:PLC;工業機器人;PROFINET IO
中圖分類號:TP249 ?文獻標志碼:B ?文章編號:1671-7988(2020)05-187-03
Abstract: In the intelligent manufacturing line, industrial robots can complete the tasks of welding, spraying glaze, assembling, stacking and so on. The main controller sends tasks to the industrial robot through PLC, and collects the status information of the industrial robot. Based on a typical intelligent manufacturing line, this paper studies the communication method based on PROFINET IO Industrial Ethernet from the application point of view, and realizes the communication between s7-1200 PLC and several ABB robots.
Keywords: PLC; Industrial robots; PROFINET IO
前言
柔性制造系統(FMS)是在計算機統一控制下,由物料自動輸運和裝卸系統將若干臺數空加工設備連接起來,構成適合于多品種、中小批量生產的一種先進制造系統[1]。在柔性制造系統中,工業機器人應用越加廣泛。通過工業機器人可以完成焊接、噴釉、裝配、碼垛等任務。目前大部分柔性制造系統的控制思路是,總控通過PLC給工業機器人下發任務,并采集工業機器人的狀態信息。因此確保PLC與工業機器人之間的通信流暢與穩定是非常重要的。
ABB機器人作為主流的工業機器人,提供了標準的專業接口,這讓相關系統的集成工作變得簡單[2]。西門子可編程序控制器在我國應用廣泛,其中,S7-1200設計緊湊、組態靈活且集成的以太網接口可用于與計算機、人機界面和其他PLC的通信[3]。
西門子PLC和ABB工業機器人作為當前常見的柔性制造系統的重要組成部分,兩者間的通訊是關鍵技術之一。
1 PROFINET IO
工業以太網(Industrial Ethernet)是一種基于以太網的工業通訊模式,它遵循國際標準IEEE802.3。其材質的選用、產品的強度和適用性方面應能滿足工業現場的需要[4]。相關調研表明,大約四分之三的工業以太網使用Ethernet IP,PROFINET,或Modbus TCP。
PROFINET由PROFIBUS國際組織(PROFIBUS Interna -tional,PI)推出,是新一代基于工業以太網技術的自動化總線標準,用于實現工業以太網的集成和一體化的自動控制解決方案[5]。PROFINET分為PROFINET IO和PROFINET CBA兩種。其中,PROFINET IO用于分布式I/O自動化控制系統,其工作性質類似于PROFIBUS-DP,但數據傳輸速率高于后者。S7-1200 CPU提供一個PROFINET端口用于通過PROFI -NET網絡通信。
2 基于PROFINET IO通信
圖1為我單位研發的智能制造系統,其毛坯件為兩種,分別為圓柱形工件和方形工件。該系統含有三臺工業機器人,分別為機床上下料機器人、雕刻機器人和裝配機器人。其中,機床上下料機器人包含外部軸,其任務有兩個,一是將輸送鏈上的工件放置到數控車床和加工中心進行加工,二是將機床加工過的工件放置到雕刻單元進行雕刻;雕刻機器人用于零件的雕刻;裝配機器人用于兩個零件的裝配。
三臺不同型號的ABB工業機器人與S7-1200 PLC通過Anybus X-gateway通信。Anybus X-gateway允許連接PROFINET設備或網絡到許多其他的現場總線或工業以太網網絡。其能復制兩個方向的I/O數據,因此可實現兩個網絡間的數據交換。其與所有主流PLC兼容,配置簡單,無需編程。
西門子S7-1200 PLC通過Anybus模塊和ABB機器人DeviceNet主從通信,Anybus模塊做DeviceNet主站,多臺ABB機器人做DeviceNet從站。S7-1200 PLC做Anybus模塊的PROFINET IO主站。
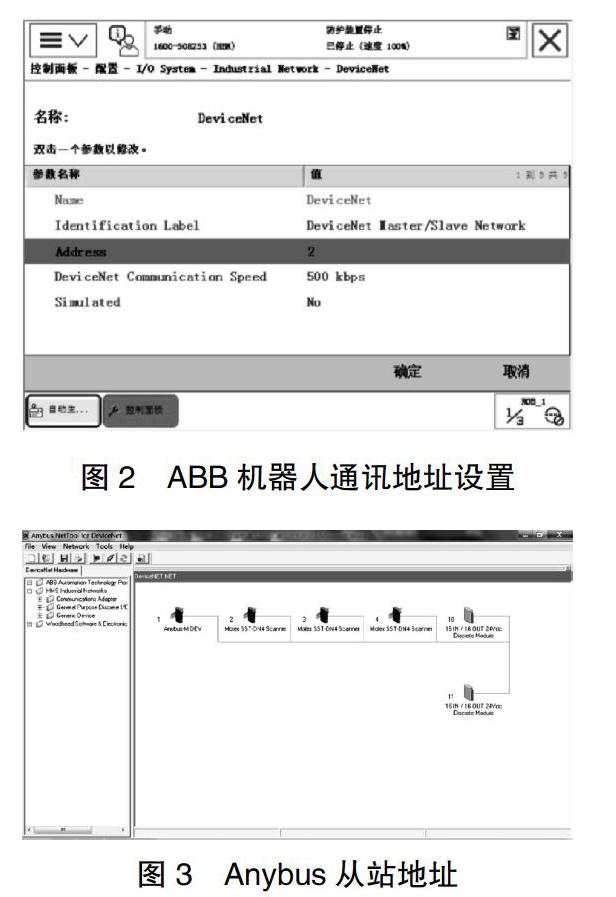
博途軟件組態Anybus模塊,需要先安裝Anybus模塊GSD文件,并根據實際通信數據的多少,選擇通信輸入/輸出的長度,這里設置IO為200-263。修改 ABB機器人Device Net通訊地址,三臺機器人地址分別為2、3、4,如圖2所示。
然后進行Anybus模塊配置。打開Anybus Configuration Manager - X-gateway軟件,選擇 Upper 和 Lower端的協議類型,分配 PROFINET IO端的通訊數據長度,與 PLC組態中一致。然后,利用局域網連接并將配置下載入模塊。
打開Anybus NetTool for DeviceNet軟件,安裝ABB機器人的 EDS 文件。計算機需要安裝Robot Studio或者從其它已安裝Robot Studio的電腦中復制EDS文件。創建新連接后,所有的從站會顯示在界面中。2-4是機器人DeviceNet通信地址,10-11是D652 DeviceNet地址。操作Anybus M-DEV設置各個機器人數據長度,這里均設置成16個字節,下載并測試通信情況。
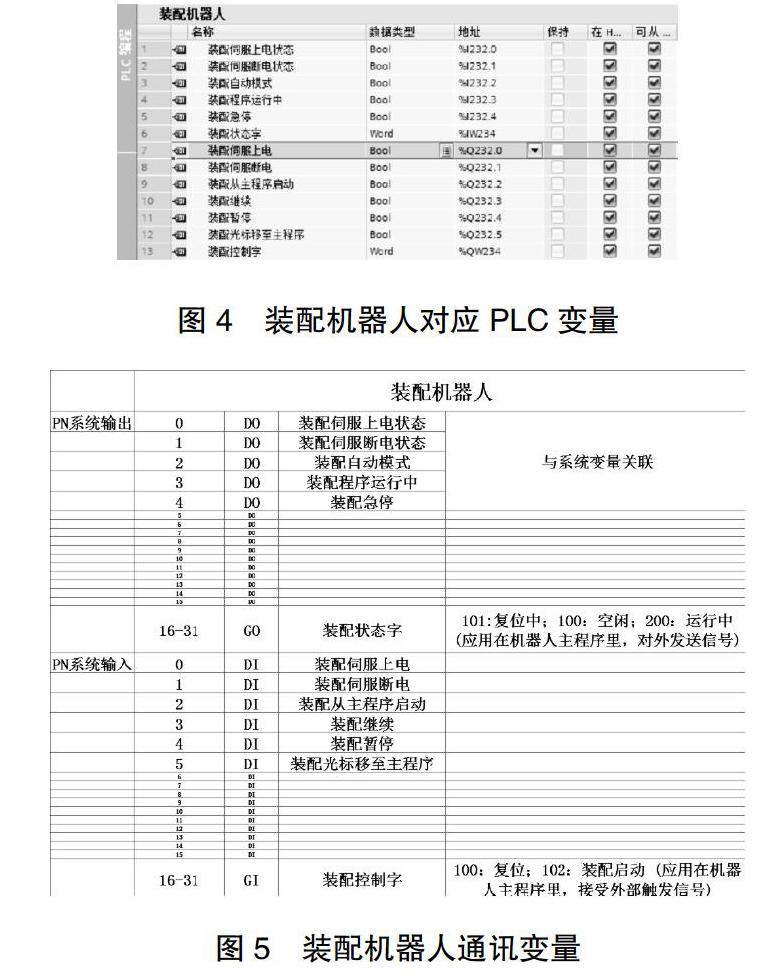
機器人接收來自PLC的運行指令,向PLC反饋本身的運行狀態,向PLC發送需要轉發的指令,并接收轉發回的其它設備狀態,因此機器人端的通訊變量與PLC端的變量應一一對應。以上述裝配機器人為例,前兩個機器人各占16個字節,裝配機器人IO從232.0開始,如圖4所示。機器人中通訊變量如圖5所示。
4 結語
筆者經過研究發現基于PROFINET IO的PLC與工業機器人的通信方式,雖然需要通信硬件模塊,如Anybus X-gateway,但其傳輸數據量大且信號傳輸穩定,適用于要求較高的場合。另外,這種通信方式配置簡單,無需編程,適用于幾乎所有型號的ABB機器人,可以較為方便的用于改
造當前總線式自動化生產線。其他型號的工業機器人和PLC之間的通信也可以參照本文所述的方式。
參考文獻
[1] 王隆太.先進制造技術[M].北京:機械工業出版社,2015:143-146.
[2] 張德燚,李陽.ABB機器人在自車身焊裝設備中的應用[J].汽車實用技術,2017,42 (3) :59-60.
[3] 廖常初.S7-1200 PLC編程及應用[M].北京:機械工業出版社,2010: 3-10.
[4] 陳凌凌,陳以.工業以太網在工業控制網絡中的應用與發展綜述[J].中國科技信息.2007,(18):147-148.
[5] 王斌,曲杰,張國旭,等.PROFINET總線技術在西門子TIA博途軟件中的應用[J].鍛壓裝備與制造技術.2015,(6):79-83.
