基于場景識別的電動汽車喚醒、休眠策略設計
2020-04-10 06:52:28徐志峰孫江輝張兆龍李玉軍
汽車實用技術 2020年5期
徐志峰 孫江輝 張兆龍 李玉軍


摘 要:為合理應用車載低壓電能,文章設計了基于應用場景識別的一體化分層喚醒、休眠控制的策略。根據KL30下整車有效喚醒狀態按需喚醒電控單元,并引入用車場景預測、提前喚醒電控單元,解決電控單元按需喚醒下用車場景快速切換帶來的響應延遲問題;同時,通過場景識別進一步排查無法休眠的電控單元,進行防低壓虧電控制。文章應用CANOE?工具仿真了用戶遙控解充電槍鎖操作及充電口單元無法休眠工況,結果表明,所提出的控制策略能夠提高解充電槍鎖響應速度,并能夠識別出無法休眠電控單元進行防虧電控制。
關鍵詞:場景識別;電動汽車;喚醒、休眠策略
中圖分類號:TP273 ?文獻標識碼:B ?文章編號:1671-7988(2020)05-31-04
Abstract: In order to save 12V power, wakeup & sleep mechanism is designed by use case recognition. After use case recognition and user intention prediction according to the running wakeup resource and user action, only related ECUs will be waked up. Moreover, ECUs that cannot sleep in time will be marked and measures will be taken to prevent 12V battery drainage. Door operating condition and illegal wakeup condition of a model car was simulated by CANOE, to validate the control strategy in energy saving and battery drainage prevention, accordingly.
Keywords: Use Case Recognition; Electric Vehicle; Wakeup &Sleep Control
1 前言
隨著汽車智能化、網聯化、電動化、共享化,車載電控單元數量不斷增多[1]。電控單元應按照用戶需求及時喚醒,以執行電控功能;同時,應在無功能需求時盡快進入掉電或休眠狀態,以防止蓄電池虧電[2]。當前,文獻多圍繞通過設計局部網絡[3-5],開展喚醒、休眠機制設計的研究,但未考慮設計機制以避免當前無關、未喚醒控制器在下一功能需求出現時喚醒啟動慢、影響用戶體驗的問題。此外,現有防虧電研究多聚焦于低壓電源管理策略[6],而圍繞如何識別無法休眠電控單元、進行防虧電主動控制的研究也較少。
針對以上問題,本文設計了一種基于所識別的應用場景同時考慮用戶意圖預測的喚醒、休眠的一體化控制機制,能夠在保證功能響應前提下按需進行部件差異化喚醒;同時,識別無法休眠部件并進行防虧電主動控制。
2 一體化供電、喚醒及休眠控制系統架構
2.1 供電、喚醒源的分類及設計方法
按照供電電路的結構,汽車上典型的低壓供電方式可分為兩類:一類為常電供電,即直接由12V蓄電池正極供電;還有一類為由其它控制器控制繼電器供電,比如ACC繼電器、IG繼電器、充電類控制供電繼電器,等。按照喚醒來源,可將喚醒源分為兩類:一類為本功能域外輸入的喚醒,比如動力域接收的網聯模塊發出的遠程控制功能喚醒信號;另一類為自身直接接收的傳感器輸入的喚醒信號或本功能域內其它控制器輸出的喚醒,比如動力域控制器接收到的插槍喚醒信號。本文提出一種場景需求設計法,進行電控單元供電、喚醒機制設計。首先根據用戶使用情況進行車輛場景劃分,每個場景下均對應一系列電控功能,電控功能又與控制器關聯,經過如此由上至下分析,明確了電控單元需要在哪些用戶場景下工作,最終對應得出供電、喚醒機制可選范圍。
根據用戶使用場景,將用車場景劃分為靜置休眠、總線激活、高壓上電、低壓上電、整車上電、車輛駕駛共六個場景,各模式下典型功能如表1所示。在休眠靜置場景下,所有電控單元應該處于斷電或休眠狀態。部分接收車外喚醒的控制器保持喚醒探測狀態,需要連接常電。在總線激活場景下,通常情況下為某接收到車外喚醒的控制器將功能相關控制器喚醒,以實現功能運轉,這就要求此類接收車外事件喚醒的控制器具備喚醒輸出能力,比如對外發送網絡報文[7],或者對外輸出高低電平變化的線路喚醒;與此對應,與功能相關的控制器應能夠被上述第一個喚醒控制器喚醒。在高壓上電場景下工作的電控單元,可由動力域控制器在進行高壓上電引導時同步喚醒,比如熱管理系統控制單元。僅在低壓上電、整車上電、車輛駕駛場景下有工作需求的控制器,僅需要具備接收IG喚醒,出于節省IG電連接線束考慮也可具備網絡喚醒。
當電控單元無功能需求時,應在供電或喚醒切斷后對應進入停機或休眠狀態。
2.2 一體化供電、喚醒及休眠架構設計
為便于整車喚醒、休眠的統一管理,本文設計了具有分層架構的一體化供電、喚醒機制。與分散式喚醒、休眠機制不同,本架構下,各功能域控制器的喚醒、休眠由域控制器全盤管理,包括根據場景喚醒需要的控制器或引導其休眠,和無法正常休眠控制器的識別與防低壓虧電管理。域控制器即指圖1的動力域、車身域、信息娛樂域等的主控制器[8]。
以交流充電功能為例,介紹本文所研究的分層喚醒機制。在用戶將交流充電槍與車端充電口連接后,充電口控制單元會被充電槍連接這一事件喚醒;接下來,充電口控制單元將整車控制器喚醒,并告知其現在有交流充電槍連接;整車控制器在判定車輛具備充電條件時,將動力電池控制器、冷卻控制器等喚醒,以執行充電。
前文中提到,各域控制器根據當前場景判斷及場景預測,進行下游控制器喚醒,當本功能域和其它功能域均無相關功能需求時,域控制器引導下游控制器進入休眠。其中,本功能域無功能需求是指域控制器自身無報文喚醒以外喚醒輸入,域內各下游OSEK網絡管理控制器均置位并發送休眠請求標志位,或不參與OSEK網絡管理的域內控制器停止報文發送。
3 預測喚醒與異常防虧電控制
考慮到電控單元由休眠狀態到喚醒后的可正常工作狀態,大概需要150ms左右的時長,若喚醒回路中有不止一個控制器,則整體喚醒時間將翻倍或更長,最終可能影響用戶需求的響應速度。因此,有必要進行場景預測并提前喚醒即將可能用到的控制器,以準備好響應用戶需求。本文主要研究用戶解鎖交流充電槍操作下的預測喚醒控制。為防止較大電流充電過程中,充電槍被帶載拔出造成設備損毀,規定充電功率在6.6kw時需要配置充電槍鎖止裝置。此外,在充電結束后,出于防盜考慮,車端充電口控制單元保持充電槍鎖處于閉鎖狀態,當用戶下一次用車時,按動遙控鑰匙解鎖車門后,再連續按動遙控鑰匙解鎖鍵兩次即打開充電槍鎖,以便于用戶在車外即拔下充電槍,結束充電。在這一場景下的預測喚醒控制策略,可表示為流程圖2。
域控制器能夠根據場景建立喚醒白名單,此白名單用于休眠異常控制器的識別。域控制器根據接收到的報文情況,對于活躍報文屬于白名單外電控單元的,標記為無法正常休眠,此后域控制器清除對域外網段的功能需求,以使本域內的休眠故障控制器不影響其它網段正常休眠。
4 工況仿真與策略驗證
4.1 仿真環境介紹
本文應用CANOE進行了總線仿真,所搭建的網絡分為三個網段,分別為車身域網段、動力域網段、動力域內部網段。所搭建網絡模型中的4個控制器均具備OSEK網絡管理機制,且均連接常電。GW為網關控制器,負責根據域控制器跨網段路由需求進行信號跨網段路由;PDCU、BDCU分別為動力域控制器、車身域控制器,負責根據本域內及整車其它功能域的功能需求,進行下游控制器喚醒、休眠引導控制;CCU為充電口控制單元,負責根據PDCU命令進行電磁鎖閉鎖、解鎖,負責接收充電設備信號并首先被喚醒。
4.2 充電后用戶遠程解鎖場景仿真
4.2.1 未采用預測喚醒控制策略時解充電槍鎖
仿真結果圖3所示,首先,遙控鑰匙解鎖信號將BDCU喚醒,BDCU開始在車身域網段發送報文,GW隨后被喚醒并在車身域網段發送報文。可見,由于未采用預測喚醒策略,用戶第一次按下解鎖車門按鍵,BDCU僅根據當前功能需求未將動力域喚醒。隨后3.2s時BDCU接收到用戶連續兩次按下遙控鑰匙解鎖鍵后,才開始要求GW喚醒動力域,并向PDCU發送解鎖信號,后者再將CCU喚醒,在3.7s時解鎖充電槍的電磁鎖。從用戶在開始發出解充電槍鎖信息,到CCU將充電槍鎖解開,中間需要依次喚醒PDCU及CCU,大概耗時500ms。
根據用戶調查,發現部分用戶在連續兩次按下遙控鑰匙解鎖鍵后,會同步進行拔槍操作,若有上述500ms響應延時,會導致第一次拔槍失敗。
4.2.2 采用預測喚醒控制策略時解充電槍鎖
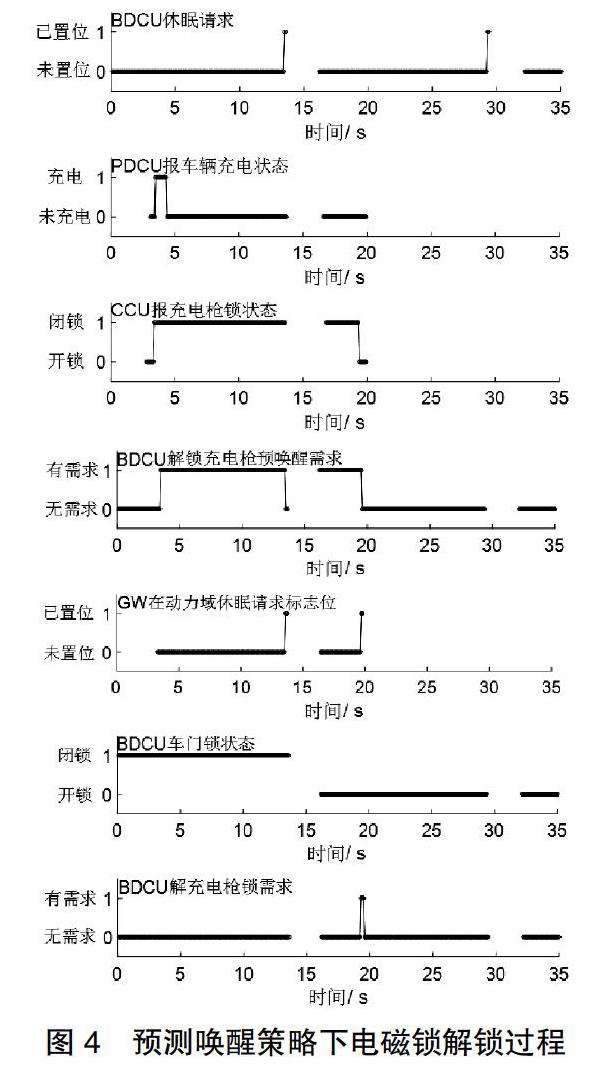
當采用預測喚醒控制策略時,仿真結果如圖4所示。根據結果發現,在車輛進入充電前,3.3s時電磁鎖已經閉鎖,CCU經過PDCU、GW的信號傳遞,向BDCU發送了電磁鎖閉鎖狀態,后者開始置位預測喚醒需求位。充電結束后,整車進入休眠狀態,用戶第一次按下遙控解鎖按鍵,16.2s時BDCU醒來即開始向GW提出喚醒動力域的需求,并通知PDCU有預測充電槍解鎖需求,后者將CCU喚醒。至此,BDCU、PDCU、CCU均進入喚醒狀態,準備好執行用戶的解充電槍鎖命令。19.3s時BDCU收到上述命令傳遞到CCU后,充電槍鎖隨后打開,間隔100ms。用戶拔下充電槍,由于無功能需求,車輛進入休眠。32.2s時,當用戶再次按下遙控鑰匙解鎖車門按鍵,車上僅BDCU被喚醒,PDCU、CCU均未喚醒。
結果表明,在采用了預測喚醒策略后,BDCU能夠根據充電槍電磁鎖閉鎖狀態,置位充電槍解鎖預測喚醒需求位,并在下一次被遙控解車門鎖信號喚醒時,要求將PDCU、CCU喚醒,便于收到進一步命令后將充電槍迅速解開。
4.3 整車下電后CMU無法休眠場景及防虧電控制
本節進行異常休眠故障仿真。在充電槍未連接的前提下,CCU持續發送休眠請求指示位為0,導致動力域內網段無法休眠,且PDCU無法向GW發送休眠請求;1.1s時,PDCU根據收到的報文發現,車輛未插槍條件下,CCU仍無法休眠,從而識別出CCU有異常休眠情況,PDCU標記“休眠異常標志位”;此后,PDCU在動力域對外網段發送休眠請求指示位,在BDCU滿足延時10s休眠條件后,GW引導整車除動力域內部網段外,進入休眠狀態,最終使休眠異常僅影響動力域對內網段。
5 結論
本文研究了基于應用場景識別的電動汽車喚醒、休眠一體化控制策略,結論如下:
(1)分層的一體化喚醒、休眠控制架構,統一解析車輛的功能需求,基于應用場景需求進行相關電控單元喚醒控制,從而最小化喚醒電控單元數量,并進行異常休眠處理;
(2)基于應用場景預測,域控制器可以進行下游控制器的預測喚醒控制,本文探討了遙控解鎖場景下,采用預測喚醒策略能夠保證充電槍解鎖更迅速;
(3)基于應用場景,識別出無法正常休眠的電控單元,進行防虧電控制,以降低部件休眠異常帶來的12V蓄電池虧電的風險。
參考文獻
[1] 歐陽明高.迎接新能源智能化電動汽車新時代[J].科技導報, 37(7): 1-1.
[2] Suozzo C. Lead-acid battery aging and state of health diagnosis[D]. The Ohio State University, 2008.
[3] Seyler J R,Streichert T, Warkentin J, et al. A self-propagating wakeup mechanism for point-to-point networks with partial network support [C]//2014 Design,Automation & Test in Europe Conference & Exhi -bition (DATE). IEEE, 2014: 1-6.
[4] 顧曉莉.車載低壓電源管理系統的研究[J].汽車實用技術,2011(07): 5-9.
[5] Liebetrau T, Kelling U, Otter T, et al. Energy saving in automotive E/E architectures[J]. Infineon Technologies, www. infineon. com, Tech. Rep, 2012.
[6] Eberhard Meissner,Gerolf Richter. Battery Monitoring and Electrical Energy Management[J]. Journal of Power Sources,2003,116(1).
[7] 初洪超.網絡管理在汽車CAN系統的應用[J].汽車實用技術,2016 (05):114-118.
[8] Reger L.The EE architecture for autonomous driving a domain-based approach[J]. ATZelektronik worldwide, 2017, 12(6): 16-21.
