純電動商用車動力系統選型及其基于Cruise的動力性經濟性仿真
2020-04-10 06:52:28孫國慶葉硼林余翔宇丁遠濤
汽車實用技術 2020年5期
孫國慶 葉硼林 余翔宇 丁遠濤


摘 要:純電動商用車動力系統選型是純電動商用車開發過程中的重中之重;純電動商用車動力性經濟性仿真在純電動商用車性能開發過程中具有重要指導作用。論文根據某型純電動商用車總體設計指標,采用理論公式計算初步選定動力系統參數,然后利用Cruise軟件進行整車動力性經濟性仿真。仿真結果驗證了該車型動力匹配的合理性。論文對純電動商用車動力匹配技術研究具有一定的指導作用。
關鍵詞:EV;純電動商用車;動力匹配;Cruise;動力性經濟性
中圖分類號:U462.3 ?文獻標識碼:A ?文章編號:1671-7988(2020)05-11-05
Abstract: The Selection of Power System of Pure Electric Commercial Vehicle is of paramount importance of the performance development of Pure Electric Commercial Vehicle; The Dynamic Economy Simulation of Pure Electric Commercial Vehicle plays an important role in the performance development process of Pure Electric Commercial Vehicle. According to a certain type of Pure Electric Commercial Vehicle overall design index, used the method of theoretical calculation formula, initially selected powertrain parameters of Pure Electric Commercial Vehicle , and then the simulation of dynamic nature and economical efficiency with the Cruise software was done. The calculation result of the dynamic nature and economical efficiency verified the rationality of the model of dynamic match. The paper has a certain guiding role on the development of the power matching technology of Pure Electric Commercial Vehicle.
Keywords: EV; Pure Electric Commercial Vehicle; Power system; Cruise; Dynamic nature and economical efficiency
前言
隨著《GB 30510-2018 重型商用車輛燃料消耗量限值》(第三階段)的實施,及對國家《節能與新能源汽車產業發展規劃(2012-2020年)》的趨勢分析,重型商用車第四階段油耗限值也將提上日程。對此,商用車企業面臨嚴重的油耗壓力。同時,隨著國家排放標準的不斷升級,各地國六排放標準陸續實施,企業又同時面臨嚴苛的排放壓力。在此背景下,純電動商用車越來越受到企業的重視。當前,國內主流商用車企業都已推出純電動產品。
隨著新能源車輛補貼標準的退坡及市場競爭的加劇,市場對純電動商用車的動力性、經濟性、續航里程也提出了更高的要求。當前,采用先進開發技術開展純電動商用車動力匹配技術研究,是純電動商用車開發過程中的重中之重。Cruise作為一種先進的車輛動力性經濟性仿真軟件,在當前車輛開發過程中得到了廣泛的應用。
1 整車動力性經濟性設計指標
1.1 純電動商用車的動力性指標
純電動商用車的動力性指標主要包括純電動商用車的最高車速、加速性能、爬坡性能等[1]。根據《GB/T 18385-2005 電動汽車動力性能試驗方法》[2],純電動商用車的動力性主要由以下三個指標來評定:
(1)純電動商用車的最高車速
純電動商用車的最高車速由以下兩個指標來定義:a、30min最高車速,指純電動商用車能夠持續行駛30min以上的最高平均車速;b、1km最高車速,指純電動商用車能夠往返各持續行駛1km以上距離的最高車速的平均值。
(2)純電動商用車的加速能力
純電動商用車的加速能力是指純電動商用車從速度V1加速到V2所需的最短時間。
(3)純電動商用車的爬坡能力
純電動商用車的爬坡能力包含以下兩個指標:a、爬坡車速:純電動商用車在給定坡度(通常為4%或12%)的坡道上能夠持續行駛1km以上的最高平均車速;b、坡道起步能力:純電動商用車在坡道上能夠起動且1min以內向上行駛至少10m的最大坡度。
1.2 純電動商用車的經濟性指標
根據《GB/T 18386-2017 電動汽車能量消耗率和續駛里程試驗方法》[3],純電動商用車的經濟性通常按純電動商用車在一定工況(循環工況或等速工況)下能夠持續行駛的里程數來定義。
通常在純電動商用車設計時,先根據整車總體設計指標,設定動力性、經濟性目標參數,在據此選定動力傳動系統參數。
1.3 計算實例
某型純電動商用車為4×2輕型載貨車輛,整車總質量4495kg。整車設計指標如下:
(1)根據中國高速限速原則,N2類商用車限速100km/ h,計算時考慮10%的超速性能,設定最高車速Vamax≥110km/h;
(2)最大爬坡度tanαmax≥20%[4];
(3)加速時間:要求0~100 km/h 原地起步加速時間t≤25s;
(4)要求整車綜合工況續駛里程≥200km,40km/h等速工況續駛里程≥280km。
其它已知參數:整備質量2805kg,車輛迎風面積A=3.2 m2,空氣阻力系數CD=0.5;滾動阻力系數按公式f=0.0076+ 0.000056V[5]計算;輪胎靜力半徑0.375m,滾動半徑r=0.391m。
2 動力系統參數的初步選定
2.1 電機性能參數的初步選定
2.1.1 電機峰值功率的確定
電機的峰值功率應能滿足純電動商用車在最高車速、最大爬坡度及急加速時分別對應的最大功率需求[6]。
(1)根據最高車速計算的電機最大功率
純電動商用車以最高車速在平直路面行進時所需的最大功率為:
(2)根據最大爬坡度計算的的電機最大功率
純電動商用車以某一車速爬上最大坡度時所需要的電機功率為:式中,vp為純電動商用車爬坡車速;αmax為最大坡度角,單位(°)。
(3)根據加速能力計算的電機最大功率
純電動商用車的加速能力是指純電動商用車從某一速度加速到另一速度所需的最短時間。純電動商用車滿足加速能力所需的電機功率為:
式中,vf為加速結束后的車速,單位m/s;vb為驅動電機額定轉速對應的車速,單位m/s;ρa為空氣密度;ta為預期的加速時間,單位s;δ為旋轉質量轉換系數。
電機的峰值功率應能同時滿足純電動商用車對最高車速、最大爬坡度和加速能力的要求,所以驅動電機的峰值功率為:
2.1.2 電機額定功率的確定
電機的額定功率應滿足純電動商用車持續行駛最高車速要求,同時要考慮電機的過載特性。若λ為電機過載系數,則驅動電機的額定功率為:
2.1.3 電機轉速范圍的確定
電機最高轉速與整車最高車速之間關系為:
2.1.4 電機扭矩的確定
2.2 傳動系速比的確定
傳動系速比由以下方式確定:
2.3 動力電池參數的選定
動力電池匹配主要包括功率匹配和能量匹配兩個方面。
2.3.1 動力電池功率匹配
動力電池組必須滿足純電動商用車驅動電機供電、電動汽車行駛時所需的功率需求。動力電池組充放電額定功率、峰值功率要不低于驅動電機額定功率、峰值功率。
2.3.2 動力電池能量匹配
動力電池組的能量取決于純電動商用車的續駛里程,電池組的能量越大,純電動商用車續駛里程越長,但整車重量和成本隨之增加。
動力電池組的總能量計算公式為:
式中,S為純純電動商用車設定續駛里程,單位km;ξSOC為蓄電池放電深度(%);SO為純電動商用車單位能量續駛里程(km/kwh)。SO可參考同類競品車型統計數據,初步估算一個大概范圍,以此初步確定動力電池組總能量范圍,再根據動力性經濟性仿真結果調整。
2.4 選型小結
根據以上計算結果,結合現有供應商產品信息,初步選定的純電動商用車動力系統參數如表1所示。
3 基于Cruise的動力性經濟性仿真
3.1 概述
Cruise軟件是奧地利AVL公司開發的一款用來研究車輛動力性、燃油經濟性、排放性能及制動性能的高級模擬分析軟件。本實例中,初步選定純電動商用車動力系統參數后,應用Cruise軟件進行整車動力性經濟性仿真,以此驗證純電動商用車動力系統選型的合理性。
3.2 整車仿真模型的建立
根據純電動商用車整車動力傳動系統方案,建立Cruise整車仿真模型,如圖1所示。輸入整車及電機、動力電池等各功能模塊參數,并添加機械、電氣、信息連接。
3.3 主要計算任務的設置
根據《GB/T 18385-2005 電動汽車動力性能試驗方法》[2]及《GB/T 34585-2017純電動貨車技術條件》[4],設定以下Cruise動力性計算任務:
(1)最高車速——30min最高車速
電機功率特性用額定功率特性曲線。車輛載荷狀態設置為半載,不考慮滑移(without slip),利用cycle run計算任務設置循環工況,設置循環迭代次數,計算能持續行駛30min的最高車速。
(2)爬坡性能
1)4%爬坡車速:電機功率特性用額定功率特性曲線。車輛載荷設置為滿載,不考慮滑移(without slip),用cycle run設置循環工況,道路坡度設為4%,設置循環迭代次數,計算純電動商用車在4%的坡道上能夠持續行駛1km以上的最高平均車速。
2)坡道起步能力:電機功率特性曲線用峰值功率特性曲線,車輛載荷狀態設置為滿載。首先設置最大爬坡度計算任務(Climbing Performance),根據計算得到的瞬態最大爬坡度值,利用cycle run設置爬坡車速計算任務,以計算純電動商用車在1min內能夠持續行駛10m以上的最大爬坡度。
(3)加速性能
電機功率特性曲線用峰值。車輛載荷設置為半載,不考慮滑移(without slip),利用Full Load Acceleration計算任務,分別計算0~100 km/h 原地起步加速時間、60~100 km/h 超車加速時間。
根據《GB/T 18386-2017 電動汽車能量消耗率和續駛里程試驗方法》[3]設定以下計算任務,電機功率特性曲線用額定功率特性曲線或峰值均可,車輛載荷狀態設置為滿載,計算純電動商用車續駛里程:
1)循環工況續駛里程
參考《GB/T 27840-2011重型商用車燃料消耗量測量方法》[5],采用C-WTVC循環,如圖2所示。循環工況特征里程分配系數分別設置為市區0.1、公路0.6、高速0.3,設定動力電池的目標SOC值,設置循環迭代次數,用cycle run計算任務計算綜合工況下的續駛里程。
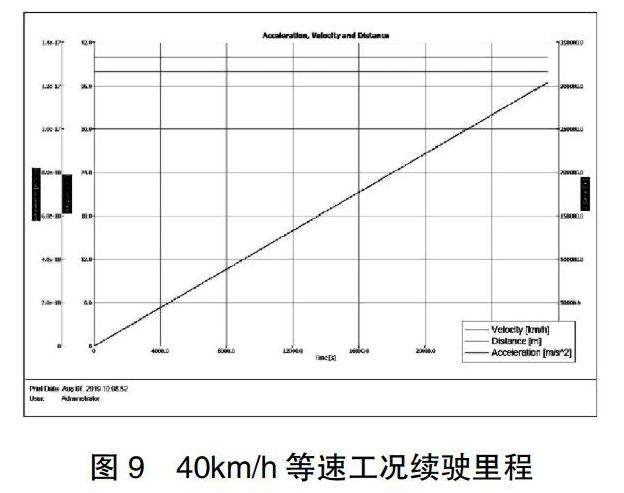
2)40km/h等速工況續駛里程
設定40km/h等速工況路譜,設定動力電池的目標SOC值,設置循環迭代次數,用cycle run計算任務計算40km/h等速工況下的續駛里程。
3.4 動力性、經濟性仿真
完成仿真計算,并整理仿真結果。
4 仿真結果分析
該型純電動商用車Cruise動力性經濟性仿真結果匯總如表2所示,各項計算任務圖表如圖3~圖9所示。
從表2及圖3~圖9可以看出,該型純電動商用車動力性經濟性各項指標均達到預期目標,動力系統選型合理。
5 結論
本文先根據某型純電動商用車整車動力性經濟性設計指標,通過理論公式計算,初步選定動力系統參數,然后采用Cruise軟件進行動力性經濟性仿真,以此驗證了該型純電動商用車動力參數選型的合理性。基于Cruise軟件的純電動商用車動力性經濟性仿真,能有效縮短車輛開發周期,提高開發效率。論文對純電動商用車動力匹配技術研究具有一定的指導作用。
參考文獻
[1] 余志生.汽車理論[M].北京:機械工業出版社,2009.
[2] GB/T 18385-2005電動汽車動力性能試驗方法.
[3] GB/T 18386-2017電動汽車能量消耗率和續駛里程試驗方法.
[4] GB/T 34585-2017純電動貨車技術條件.
[5] GB/T 27840-2011重型商用車燃料消耗量測量方法.
[6] 崔勝民.新能源汽車技術解析[M].北京:化學工業出版社,2017.
