基于圖像識(shí)別和GPS技術(shù)的全自動(dòng)補(bǔ)償式微壓計(jì)的設(shè)計(jì)
2020-04-10 13:28:58李倩甘蓉
計(jì)測(cè)技術(shù) 2020年1期
關(guān)鍵詞:測(cè)量
李倩,甘蓉
(1.貴州省計(jì)量測(cè)試院,貴州 貴陽(yáng)550003;2.中國(guó)測(cè)試技術(shù)研究院,四川 成都610021)
0 引言
補(bǔ)償式微壓計(jì)具有優(yōu)良的計(jì)量性能和穩(wěn)定性,在進(jìn)行微壓計(jì)量時(shí)通常優(yōu)先選用其作為標(biāo)準(zhǔn)器,我國(guó)的-2.5~2.5 kPa壓力計(jì)量基準(zhǔn)也采用補(bǔ)償式微壓計(jì)[1]。但是傳統(tǒng)的補(bǔ)償式微壓計(jì)[2]由于其設(shè)計(jì)上的局限性,在使用中存在人員讀數(shù)影響大、抬升準(zhǔn)確度不高、溫度修正計(jì)算方式不合理等問題。為解決這些問題,本文研制了一種全自動(dòng)補(bǔ)償式微壓計(jì),采用高清攝像頭代替人眼讀數(shù)[3],利用軟件對(duì)采集圖片進(jìn)行邏輯分析[4],大幅減小了讀數(shù)誤差,并增加了傳統(tǒng)補(bǔ)償式微壓計(jì)不具備的實(shí)時(shí)液相溫度測(cè)量功能,通過核心算法修正因溫度影響介質(zhì)密度變化[5]而對(duì)測(cè)量結(jié)果的影響,增加實(shí)地重力加速度測(cè)量功能[6],修正重力加速度對(duì)測(cè)量結(jié)果的影響[7]。本文還利用高準(zhǔn)確度滑臺(tái)電機(jī)定位代替?zhèn)鹘y(tǒng)的手動(dòng)方式抬升大容器[8],使位移測(cè)量準(zhǔn)確度得到進(jìn)一步提高。
1 傳統(tǒng)補(bǔ)償式微壓計(jì)
1.1 傳統(tǒng)補(bǔ)償式微壓計(jì)的構(gòu)造
傳統(tǒng)補(bǔ)償式微壓計(jì)主要由大容器、小容器、垂直標(biāo)尺、讀數(shù)尖頭、平面鏡、調(diào)零螺母及外殼部分等構(gòu)成[9-15],如圖1所示。
1.2 傳統(tǒng)補(bǔ)償式微壓計(jì)的工作原理
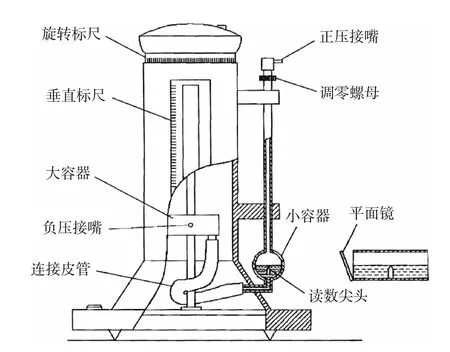
圖1 微壓計(jì)結(jié)構(gòu)示意圖
補(bǔ)償式微壓計(jì)基于連通器原理:在底部互相連通的容器中注入工作介質(zhì),在液體不流動(dòng)時(shí)連通器內(nèi)各容器的液面總是保持在同一水平面上。補(bǔ)償式微壓計(jì)在工作時(shí)通過提升大容器的位置來補(bǔ)償壓力造成的小容器水平面的下降,使小容器水平面恢復(fù)到原來的零位位置,即采用補(bǔ)償原理使大小容器的液位差所產(chǎn)生的壓力與被測(cè)壓力相平衡。
1.3 傳統(tǒng)補(bǔ)償式微壓計(jì)的使用和計(jì)算
1.3.1 讀數(shù)方法
旋轉(zhuǎn)微壓計(jì)頂部轉(zhuǎn)盤,使大容器上的刻線與垂直標(biāo)尺上的相應(yīng)刻度對(duì)齊,通過平面鏡觀察讀數(shù)尖頭與小容器中液面的位置,可觀察到尖頭及其倒影,通過微調(diào)旋轉(zhuǎn)標(biāo)尺,使讀數(shù)尖頭與其倒影相切,如圖2所示,則大小容器的壓強(qiáng)處于平衡狀態(tài),這時(shí)分別讀取垂直刻度和轉(zhuǎn)盤指示的刻度,獲得最終讀數(shù)。
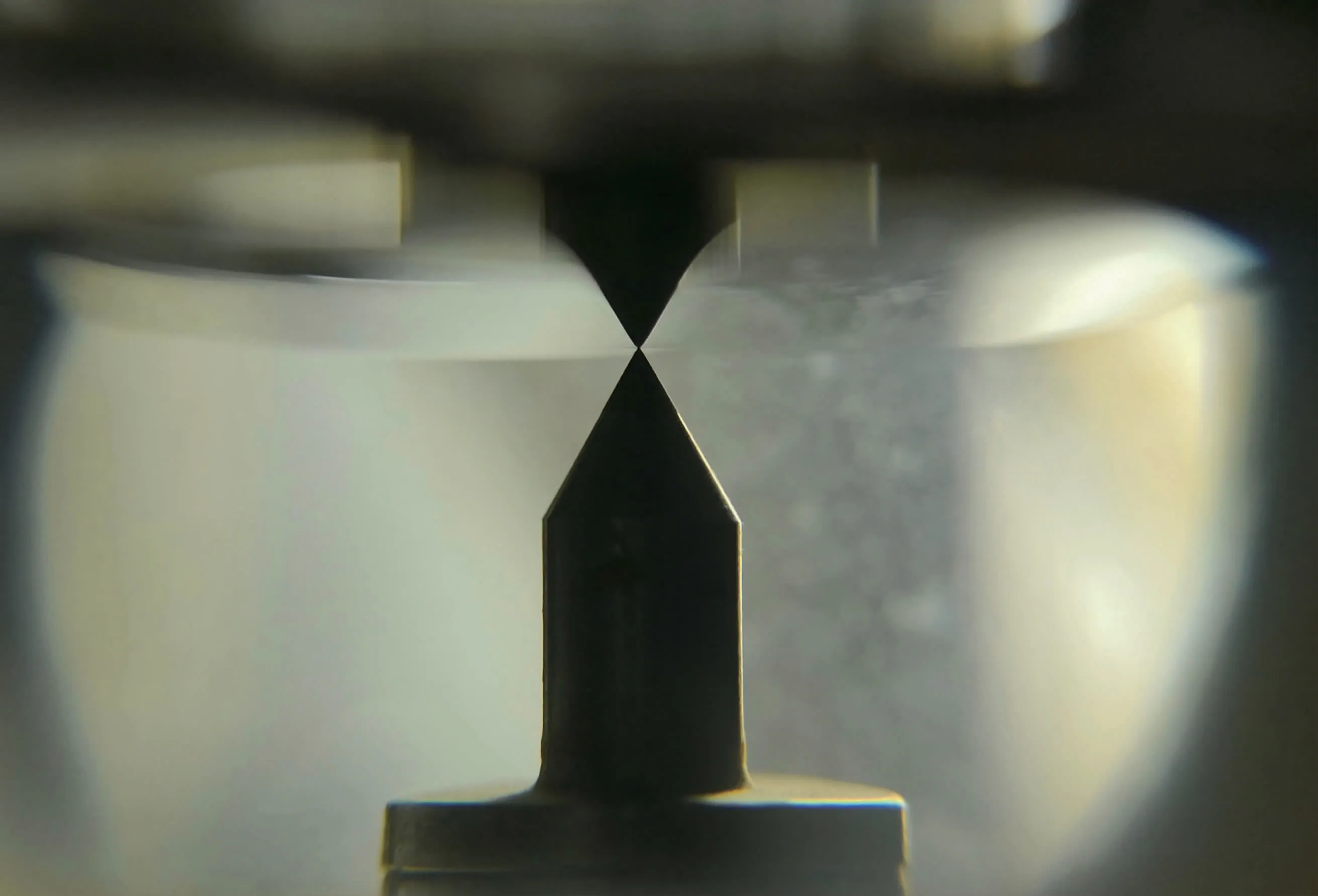
圖2 水準(zhǔn)頭讀數(shù)位置
1.3.2 計(jì)算方法
考慮大氣壓力的影響后,補(bǔ)償式微壓計(jì)測(cè)量值為

式中:pm為微壓計(jì)的實(shí)際壓力值,Pa;ρw為檢定溫度下的純水密度,kg/m3;g為使用地點(diǎn)重力加速度,m/s2;H為大容器抬升高度,m;p0為檢定時(shí)的大氣壓值,Pa。
2 傳統(tǒng)補(bǔ)償式微壓計(jì)存在的問題
2.1 讀數(shù)不準(zhǔn)
傳統(tǒng)補(bǔ)償式微壓計(jì)在讀數(shù)時(shí),用平面鏡觀察讀數(shù)尖頭與其倒影是否相切,以確認(rèn)大小容器是否達(dá)到壓力平衡狀態(tài)。這種讀數(shù)方法存在較強(qiáng)的主觀性,對(duì)檢定員的經(jīng)驗(yàn)有較高要求,不同檢定員的檢定結(jié)果存在一定偏差,人員讀數(shù)誤差不可避免。
2.2 參與計(jì)算的參數(shù)不準(zhǔn)確
從式(1)可知,補(bǔ)償式微壓計(jì)給出的壓力值與檢定溫度下的純水密度、使用地點(diǎn)重力加速度和檢定時(shí)的大氣壓值密切相關(guān),這些參數(shù)是否準(zhǔn)確,與補(bǔ)償式微壓計(jì)的準(zhǔn)確度密切相關(guān)。
2.2.1 純水密度
純水密度值與溫度密切相關(guān),目前獲取純水密度的方法主要有直接測(cè)量法和測(cè)量純水溫度后查表獲得密度法兩種,但由于補(bǔ)償式微壓計(jì)所用的純水是密封在容器內(nèi)的,不易采用直接測(cè)量法實(shí)現(xiàn),只能用環(huán)境溫度代替真實(shí)的純水溫度來得到密度值。顯然,密閉于容器內(nèi)的純水溫度與環(huán)境溫度不完全一致,因此,這里得到的純水密度是不準(zhǔn)確的。
2.2.2 使用地點(diǎn)的重力加速度
通常使用查表法獲取當(dāng)?shù)氐闹亓铀俣戎担亓铀俣鹊膶?duì)照表中僅列出了全國(guó)主要城市的重力加速度值,很多地區(qū)的重力加速度值無法查到,只能使用表中所列最近城市的重力加速度值,導(dǎo)致引入計(jì)算誤差。
2.2.3 檢定時(shí)的大氣壓值
在使用補(bǔ)償式微壓計(jì)開展檢測(cè)工作時(shí),通常使用空盒氣壓表讀取當(dāng)時(shí)的大氣壓力值,但空盒氣壓表的準(zhǔn)確度為±2.5 hPa級(jí)別,對(duì)于微壓計(jì)而言顯然誤差太大。由于一個(gè)地區(qū)的大氣壓力值通常都在某一較小范圍內(nèi)波動(dòng),有很多檢定人員也會(huì)直接使用經(jīng)驗(yàn)值進(jìn)行計(jì)算。
2.3 抬升準(zhǔn)確度不足
傳統(tǒng)的補(bǔ)償式微壓計(jì)的提升裝置采用梯形螺紋咬合,使大容器沿微壓計(jì)中央的螺桿上下移動(dòng)。但梯形螺紋的幾何學(xué)特性和機(jī)械特性所限,不能實(shí)現(xiàn)高準(zhǔn)確度的精細(xì)調(diào)整,最小分辨力只能達(dá)到10μm,從而導(dǎo)致抬升的高度不準(zhǔn)確,對(duì)計(jì)算公式中的H造成影響。
3 全自動(dòng)補(bǔ)償式微壓計(jì)設(shè)計(jì)
針對(duì)傳統(tǒng)補(bǔ)償式微壓計(jì)存在的問題,本文設(shè)計(jì)了全自動(dòng)補(bǔ)償式微壓計(jì),運(yùn)用圖像識(shí)別技術(shù)、全球衛(wèi)星定位系統(tǒng)GPS(或北斗衛(wèi)星導(dǎo)航系統(tǒng))、可編程邏輯控制器(Programmable Logic Controller,PLC),成功解決了傳統(tǒng)補(bǔ)償式微壓計(jì)存在的問題,有效提高了測(cè)量準(zhǔn)確度和增強(qiáng)了易用性。
3.1 參數(shù)實(shí)時(shí)測(cè)量的實(shí)現(xiàn)
3.1.1 水溫測(cè)量
為得到更準(zhǔn)確的純水密度值,必須對(duì)純水水溫進(jìn)行精確測(cè)量,為此,該微壓計(jì)選用了A級(jí)Pt100鉑電阻溫度傳感器作為感溫原件,根據(jù)90溫標(biāo)熱電阻分度表直接得到實(shí)時(shí)介質(zhì)溫度,誤差控制在±0.15℃。得到準(zhǔn)確的介質(zhì)溫度后,通過純水密度表得到準(zhǔn)確的介質(zhì)密度。
3.1.2 重力加速度的測(cè)量
為得到準(zhǔn)確的重力加速度值,必須獲取所在地的準(zhǔn)確經(jīng)緯度坐標(biāo),因此將GPS模塊固化在微壓計(jì)內(nèi),對(duì)微壓計(jì)所處位置坐標(biāo)進(jìn)行實(shí)時(shí)跟蹤,并通過獲取的坐標(biāo)值得到準(zhǔn)確的緯度及海拔,從而得到測(cè)量地點(diǎn)準(zhǔn)確的重力加速度值。
3.1.3 大氣壓力的測(cè)量
全自動(dòng)補(bǔ)償式微壓計(jì)中內(nèi)置了61302V型大氣壓力傳感器,測(cè)量范圍500~1100 hPa.最大允許誤差±0.02 hPa,更新率1.8 Hz,實(shí)時(shí)捕捉大氣壓力的微小變化。經(jīng)過核心算法計(jì)算,修正大氣壓變化對(duì)測(cè)量結(jié)果的影響。
3.2 提高抬升準(zhǔn)確度
將傳統(tǒng)微壓計(jì)中的梯形螺紋改為無絲杠的高準(zhǔn)確度滑臺(tái)電機(jī)。該電機(jī)采用電磁懸浮方式,具有無接觸性誤差、重復(fù)性好等特點(diǎn)。利用LM10型光柵尺測(cè)量位移,保證抬升誤差小于1μm。
3.3 讀數(shù)方式的改進(jìn)
采用圖像識(shí)別相似率技術(shù),即:每當(dāng)設(shè)備歸零、重新開始檢定前,拍攝一張零點(diǎn)照片做為檢定零點(diǎn),大容器無論抬升或下降均以該原始圖像做對(duì)比,通過核心算法識(shí)別當(dāng)前圖片與原始圖片的相似率,圖像處理基本過程如圖3所示,當(dāng)相似率達(dá)到預(yù)設(shè)值時(shí),計(jì)算機(jī)會(huì)提示操作人員,檢定結(jié)束。相似率預(yù)設(shè)值可根據(jù)被檢儀表準(zhǔn)確度要求在95.00%至99.99%區(qū)間內(nèi)進(jìn)行設(shè)置,相似率為95.00%時(shí)對(duì)準(zhǔn)誤差為10μm,相似率為99.99%時(shí)對(duì)準(zhǔn)誤差為2μm.
3.4 自動(dòng)控制的實(shí)現(xiàn)
為實(shí)現(xiàn)“一鍵式、全自動(dòng)、高準(zhǔn)確度”的微差壓測(cè)量,在設(shè)計(jì)時(shí)運(yùn)用了先進(jìn)的PLC及計(jì)算機(jī)編碼技術(shù),對(duì)微壓計(jì)的提升、讀數(shù)、計(jì)算進(jìn)行全自動(dòng)處理。
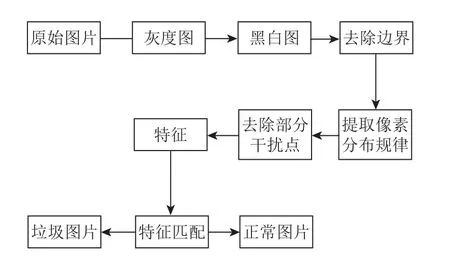
圖3 圖像處理基本過程
PLC是一種具有微處理器功能的用于自動(dòng)化控制的數(shù)字運(yùn)算控制器,可以將控制指令隨時(shí)載入內(nèi)存進(jìn)行儲(chǔ)存與執(zhí)行。PLC由CPU、指令及數(shù)據(jù)內(nèi)存、輸入/輸出接口、電源、數(shù)字模擬轉(zhuǎn)換等單元模塊組成,可實(shí)現(xiàn)邏輯控制、時(shí)序控制、模擬控制、多機(jī)通信等各類功能。本研究中使用了日本歐姆龍公司(C20,C40)編程控制器,并使用圖形化編程語(yǔ)言和文本化編程語(yǔ)言相結(jié)合的方式實(shí)現(xiàn)控制。圖形化編程語(yǔ)言包括梯形圖(LD-Ladder Diagram)、功能塊圖(FBD-Function Block Diagram)和順序功能圖(SFC-Sequential Function Chart)。文本化編程語(yǔ)言包括指令表(IL-Instruction List)和結(jié)構(gòu)化文本(ST-Structured Text)。
4 使用方法介紹
在軟件登錄界面輸入用戶名和密碼,點(diǎn)擊登錄,登錄成功后選擇儀表檢測(cè)按鈕。
4.1 計(jì)算抬升高度
通過溫度采集、大氣壓力值采集和重力加速度計(jì)算(重力加速值可以輸入定值)三個(gè)界面獲取相應(yīng)參數(shù),軟件根據(jù)內(nèi)置公式計(jì)算出抬升高度值,界面如圖4所示。
4.2 圖像識(shí)別對(duì)比
首先點(diǎn)擊零點(diǎn)設(shè)置(可多采集幾張零點(diǎn)照片,相似率穩(wěn)定變化達(dá)最小值時(shí)為最佳狀態(tài)),然后點(diǎn)擊自動(dòng)分析(軟件根據(jù)相似率給出圖像對(duì)比值),界面如圖5所示。
4.3 水面波動(dòng)區(qū)域及日志記錄
水面波動(dòng)區(qū)域的檢定頁(yè)面由5個(gè)部分組成:液位監(jiān)控區(qū)、數(shù)據(jù)采集及實(shí)時(shí)計(jì)算區(qū)域、PLC控制區(qū)、日志與水位數(shù)字模擬區(qū)域和檢定數(shù)據(jù)填寫區(qū)域。根據(jù)相似率變化虛擬水面波動(dòng),并顯示日志數(shù)據(jù)的反饋(包括PLC、相機(jī)、傳感器等)。控制監(jiān)視水面任務(wù)不僅能實(shí)時(shí)查看水面的波動(dòng)變化,還實(shí)現(xiàn)了對(duì)整個(gè)系統(tǒng)的故障診斷、信息采集預(yù)報(bào)和調(diào)度。以PLC和計(jì)算機(jī)為核心的信息處理機(jī)制完成對(duì)綜合信息的管理、計(jì)算及檢定過程的計(jì)劃、調(diào)度、監(jiān)視與自動(dòng)化控制,實(shí)現(xiàn)了全集成自動(dòng)化。水面波動(dòng)區(qū)域及日志記錄界面如圖6所示。
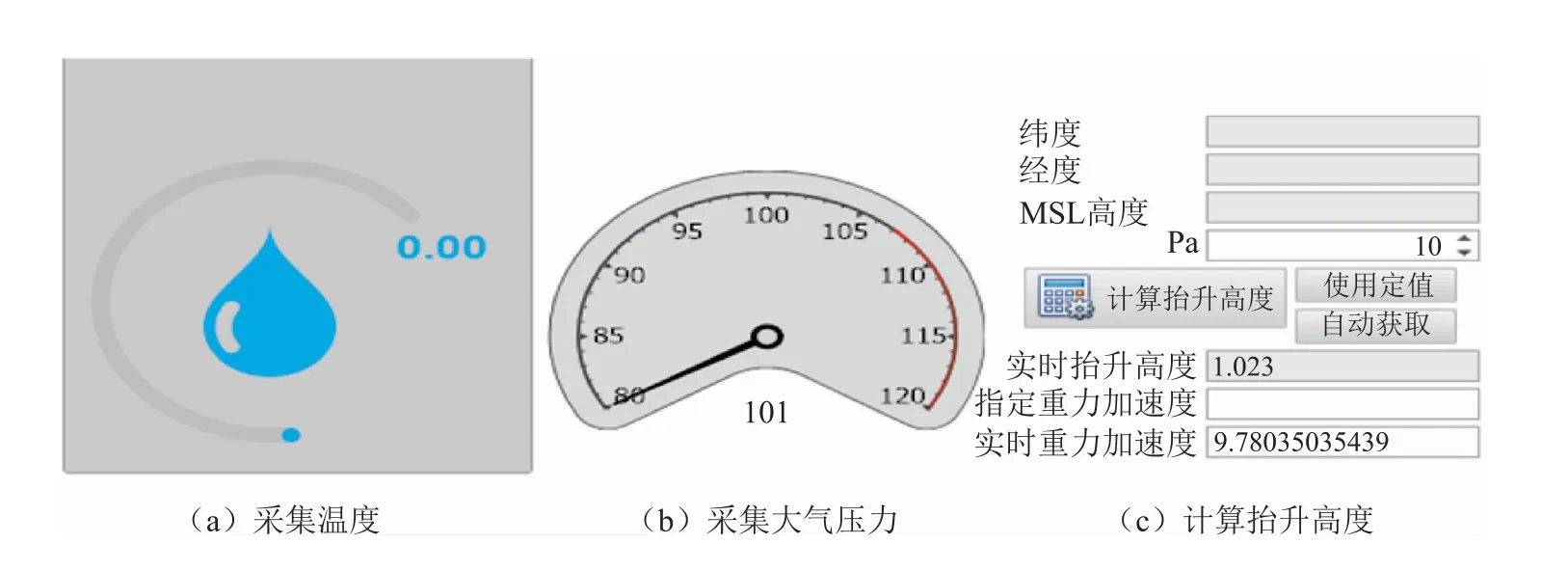
圖4 裝置各影響量參數(shù)

圖5 圖像采集界面
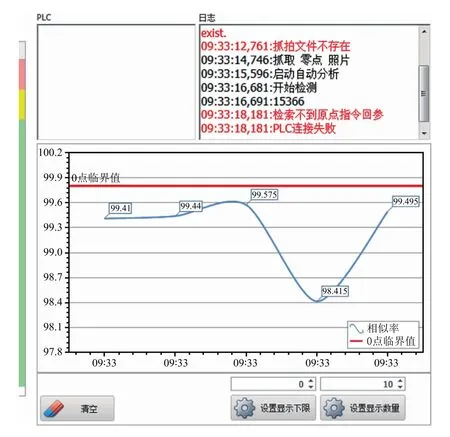
圖6 水面波動(dòng)區(qū)域及日志記錄
4.4 PLC控制
PLC控制界面如圖7所示。可直接選取圖7控制界面右側(cè)的三個(gè)定值量程(1500,2500,60 Pa),也可以直接輸入總量程壓力值和平均分點(diǎn)數(shù),點(diǎn)擊應(yīng)用即可快速確定檢測(cè)點(diǎn);下方功能按鈕分別為開始檢測(cè)(選擇好被檢量程后,設(shè)置零點(diǎn)照片并自動(dòng)分析,然后點(diǎn)擊開始檢測(cè)即可進(jìn)行自動(dòng)檢定)、清零復(fù)位(點(diǎn)擊后壓力值清零,主副電機(jī)自動(dòng)復(fù)位)、結(jié)束當(dāng)前(可以人工判斷檢定結(jié)束)、跳過檢測(cè)(可以跳過檢測(cè)點(diǎn))、上升補(bǔ)壓(手動(dòng)人工補(bǔ)壓按鈕可以更高提供準(zhǔn)確度)、下降補(bǔ)壓(人工降壓按鈕)、自定義抬升高度(根據(jù)抬升高度計(jì)算區(qū)域給出的抬升高度值,即需要檢定的壓力點(diǎn)值的換算高度,然后點(diǎn)擊上升或下降檢定)。
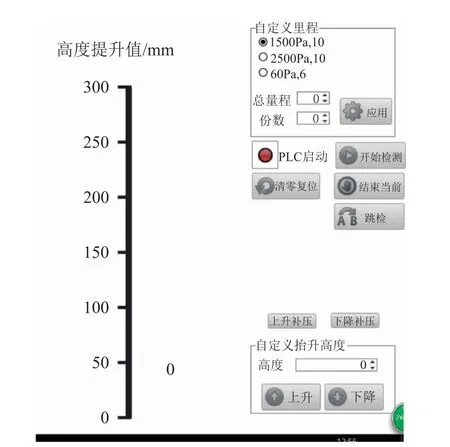
圖7 控制界面
5 計(jì)量性能測(cè)試及不確定度分析
5.1 溯源情況
將全自動(dòng)補(bǔ)償式微壓計(jì)送檢到上級(jí)計(jì)量技術(shù)機(jī)構(gòu),以0.005級(jí)標(biāo)準(zhǔn)裝置為標(biāo)準(zhǔn)器對(duì)其進(jìn)行校準(zhǔn),各點(diǎn)校準(zhǔn)數(shù)據(jù)見表1。
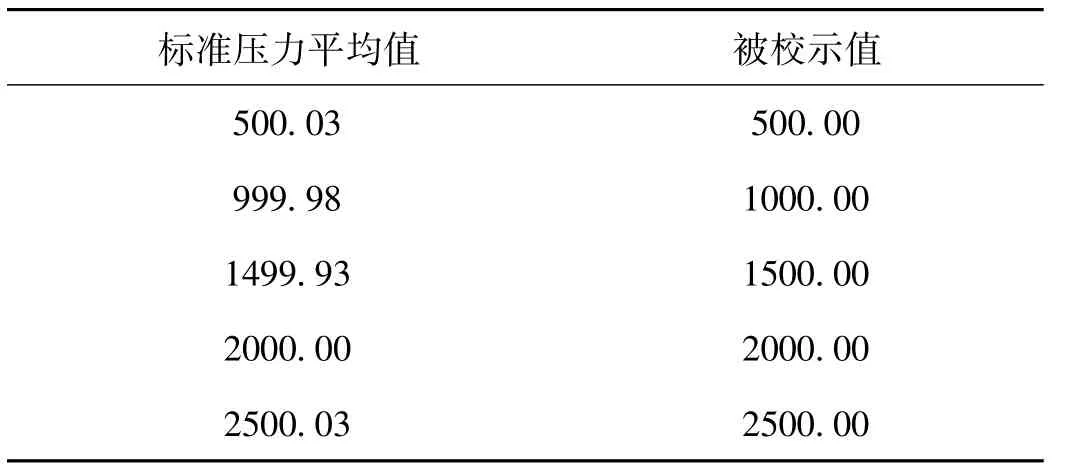
表1 溯源數(shù)據(jù) Pa
由溯源數(shù)據(jù)可以看出,該設(shè)備符合一等補(bǔ)償式微壓計(jì)的最大允許誤差要求,可以作為一等補(bǔ)償式微壓計(jì)使用。
5.2 測(cè)試數(shù)據(jù)及不確定度分析
為驗(yàn)證該設(shè)備的計(jì)量性能是否能夠滿足日常校準(zhǔn)檢定工作的需要,以該自動(dòng)補(bǔ)償式微壓計(jì)作為標(biāo)準(zhǔn)器,依據(jù)JJG 875-2005《數(shù)字壓力計(jì)檢定規(guī)程》對(duì)測(cè)量范圍為0~2 kPa、準(zhǔn)確度等級(jí)為0.02級(jí)的精密數(shù)字壓力計(jì)進(jìn)行檢定,試驗(yàn)數(shù)據(jù)見表2。
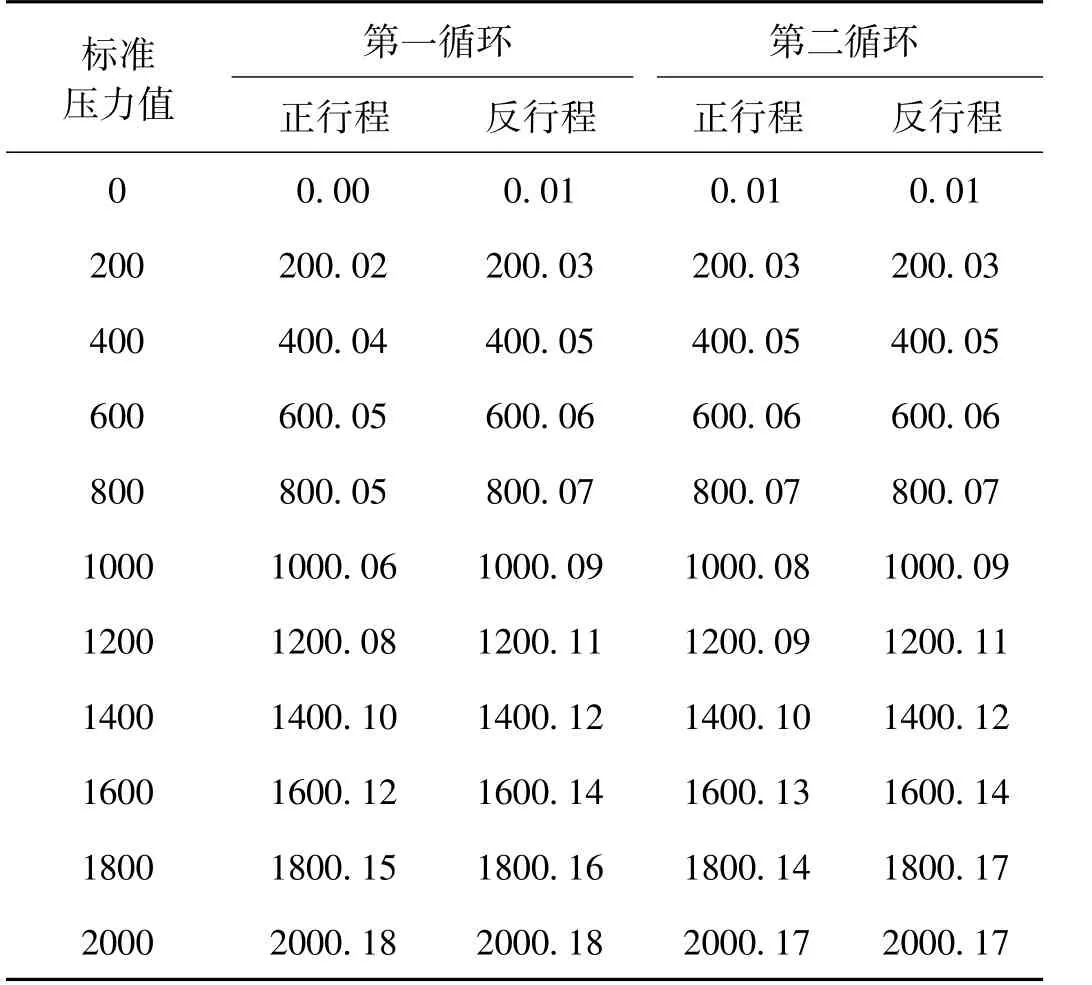
表2 試驗(yàn)數(shù)據(jù) Pa
由試驗(yàn)數(shù)據(jù)可知,被測(cè)儀表線性趨于理想狀態(tài),誤差在0.01%以內(nèi),兩次重復(fù)性誤差較小。試驗(yàn)結(jié)果滿足重復(fù)性誤差設(shè)計(jì)要求。
使用表2數(shù)據(jù)進(jìn)行不確定度分析,以公式(2)為測(cè)量模型,各不確定度分量匯總見表3。

式中:p為壓力值,Pa;ρ為試驗(yàn)溫度下介質(zhì)密度,kg/m3;ρ1為工作環(huán)境下空氣密度,kg/m3;h為對(duì)應(yīng)壓力值的介質(zhì)高度,m。
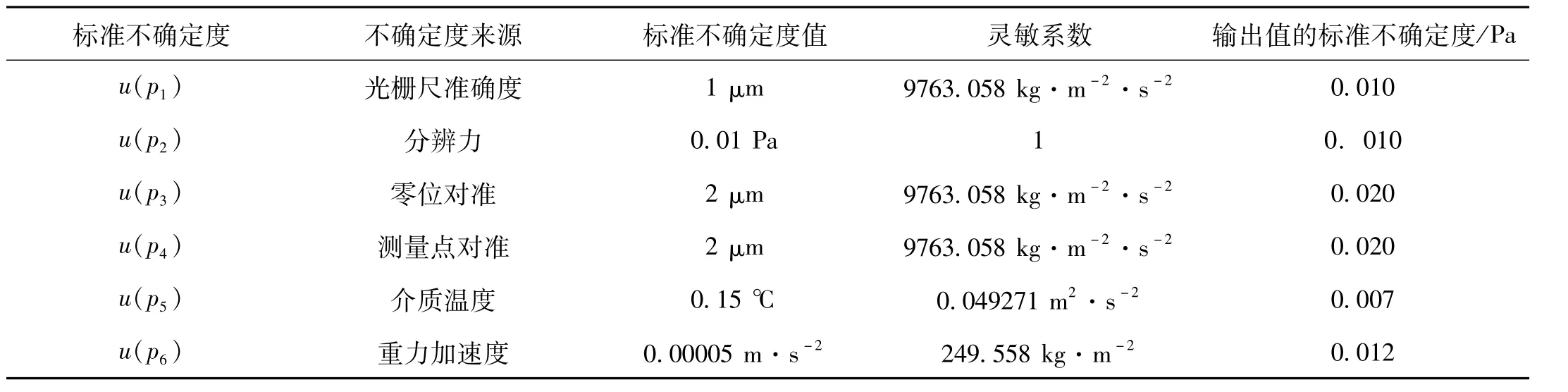
表3 不確定度分量匯總表
因引入各不確定度分量的因素彼此獨(dú)立,所以合成標(biāo)準(zhǔn)不確定度為
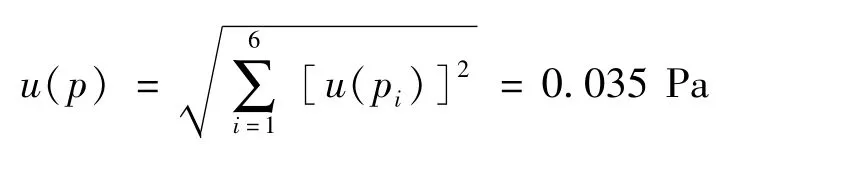
取k=2,則擴(kuò)展不確定度

根據(jù)不確定度分析得出,全自動(dòng)補(bǔ)償微壓計(jì)在進(jìn)行數(shù)字壓力計(jì)校準(zhǔn)時(shí)的測(cè)量不確定度U為0.070 Pa。因校準(zhǔn)測(cè)量范圍為0~2 kPa、準(zhǔn)確度等級(jí)為0.02級(jí)的精密數(shù)字壓力計(jì)的最大允許誤差δmax=0.40 Pa,則

由此證明本文研制的全自動(dòng)補(bǔ)償式微壓計(jì)完全滿足壓力類計(jì)量器具量值傳遞的要求。
6 結(jié)束語(yǔ)
本文研制的全自動(dòng)補(bǔ)償式微壓計(jì)利用高清攝像頭進(jìn)行圖片獲取,采用智能軟件對(duì)所采集的圖片進(jìn)行分析讀數(shù),采用滑臺(tái)電機(jī)控制位移提高測(cè)量準(zhǔn)確度,同時(shí)增加傳統(tǒng)補(bǔ)償式微壓計(jì)不具備的實(shí)時(shí)液相溫度測(cè)量、實(shí)地重力加速度測(cè)量及大氣壓測(cè)量功能,有效減小各影響量所引入的誤差。經(jīng)實(shí)驗(yàn)及不確定度評(píng)定證明,本文研制的全自動(dòng)補(bǔ)償式微壓計(jì)有效地解決了傳統(tǒng)補(bǔ)償式微壓計(jì)在測(cè)量過程中存在的人員讀數(shù)影響大、抬升準(zhǔn)確度不高、溫度修正計(jì)算方式不合理等問題,具有很好的準(zhǔn)確性、穩(wěn)定性與可靠性,并且智能化程度高,在減少人工勞動(dòng)量的同時(shí)極大地提高了測(cè)量效率,具有重要技術(shù)推廣價(jià)值。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00