面向臨近空間高機動目標(biāo)的改進(jìn)預(yù)測命中點規(guī)劃方法
2020-04-09 10:24:40尹中杰
宇航總體技術(shù) 2020年2期
尹中杰,劉 凱
(大連理工大學(xué)航空航天學(xué)院,大連 116024)
0 引言
近年來,隨著高超聲速技術(shù)的發(fā)展,以美國為代表的軍事大國正在大力發(fā)展臨近空間高超聲速武器,并相繼完成了一系列的飛行試驗[1-7],如X-43A、X-51A、HTV-2等,同時還提出了武器化的HSSW、AHW等項目,以及SR-72高超聲速平臺項目。2018年10月,美國陸軍太空與導(dǎo)彈防御司令(SMDC)披露,將與美國空軍、海軍和導(dǎo)彈防御局合作研制一型高超聲速滑翔飛行器,其中美國空軍和陸軍分別計劃在2022年前列裝“高超聲速常規(guī)打擊武器”(HCSW)和“遠(yuǎn)程高超聲速武器”(LRHW)。
由于高超武器帶來的威脅,相應(yīng)的攔截方案研究受到了各國的重視,而預(yù)測命中點設(shè)計更是因為計算時間長受到廣泛關(guān)注。預(yù)測命中點是攻擊彈、攔截彈同時間到達(dá)的一點,預(yù)測命中規(guī)劃是指在攔截彈發(fā)射前,通過算法計算出合理的攔截點,并為攔截彈裝訂相應(yīng)的諸元,使得攔截彈準(zhǔn)時精確地飛抵預(yù)測命中點的工作。為了完成預(yù)測命中點的設(shè)計,國內(nèi)外學(xué)者普遍采用基于標(biāo)準(zhǔn)彈道[8-16]的預(yù)測命中點規(guī)劃。
基于基本彈道的預(yù)測命中點設(shè)計是指攔截方提前通過對所有可以覆蓋的區(qū)域,繪制標(biāo)準(zhǔn)彈道族,并通過調(diào)整攔截彈發(fā)射方位角形成等時間攔截曲面,并結(jié)合攻擊方彈道尋找時間相同、位置重合的相遇點。該計算方法可以針對不同類型的目標(biāo)飛行器快速有效地尋找準(zhǔn)確的預(yù)測命中點。
由于需要攔截彈與目標(biāo)飛行器同一時間到達(dá)相同地點,所以解算攔截時間就是問題的關(guān)鍵。李轅等[8]、張建祥等[9]、尤劉球[10]提出了以航程或攔截彈狀態(tài)參數(shù)作為輸入迭代相遇時間的方法。在此基礎(chǔ)上, 張榮升等[11]通過以斜距為輸入進(jìn)行時間迭代,獲得攔截彈與目標(biāo)斜距相同的時間點,從而獲得相應(yīng)的攔截彈彈道。但是高超武器機動性強,彈道形式復(fù)雜,預(yù)測彈道上可能存在多個斜距相同的點,僅通過斜距無法描述預(yù)測命中點的信息,可能導(dǎo)致攔截失敗。而且由于算法原因,標(biāo)準(zhǔn)彈道族要逐一時間、逐一彈道與目標(biāo)進(jìn)行位置比對,耗時較多。
隨著攔截任務(wù)的明確與優(yōu)化算法的應(yīng)用,標(biāo)準(zhǔn)彈道族也可以根據(jù)所需的性能指標(biāo),進(jìn)行有針對的設(shè)計。盛永智等[13]首先對攔截任務(wù)進(jìn)行分析,并針對不同戰(zhàn)場情況提出了相應(yīng)的性能指標(biāo)。在此基礎(chǔ)上,謝經(jīng)緯等[14]針對不同作戰(zhàn)需求設(shè)計了不同類型的標(biāo)準(zhǔn)彈道族,大體分為考慮攔截時間需求的標(biāo)準(zhǔn)彈道族與考慮效費比的標(biāo)準(zhǔn)彈道族,并根據(jù)防御方探測系統(tǒng)首次捕獲到目標(biāo)的時間選取針對相應(yīng)需求的標(biāo)準(zhǔn)彈道族,從而提高攔截效率。但是上述算法均只考慮了當(dāng)前時刻的預(yù)測命中點規(guī)劃問題,并沒有對發(fā)射時間窗口計算問題進(jìn)行深入研究,具有一定的局限性。
針對以上問題,本文采用建立標(biāo)準(zhǔn)彈道族結(jié)合斜距單調(diào)化與時間搜索算法的方式解決因機動造成的目標(biāo)飛行器與攔截陣地斜距非線性存在多個斜距相同點,導(dǎo)致獲得錯誤預(yù)測命中點的問題。利用攔截彈標(biāo)準(zhǔn)彈道族的物理特性增加判斷條件,降低計算量,解決運算耗時長的問題,利用狀態(tài)轉(zhuǎn)換的思想設(shè)計發(fā)射時間窗口計算方法,從而快速準(zhǔn)確完成預(yù)測命中點設(shè)計與發(fā)射時間窗口計算工作。
1 攔截彈動力學(xué)建模與問題描述
1.1 質(zhì)點動力學(xué)模型
模型考慮地球自轉(zhuǎn)、球形大地假設(shè),在發(fā)射坐標(biāo)系下建立攔截彈質(zhì)點動力學(xué)模型,根據(jù)攔截彈的特性完成坐標(biāo)系的轉(zhuǎn)化、受力分析并建立動力學(xué)方程。
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
h=r-R
(9)
(10)
式中,x、y、z為發(fā)射系x、y、z軸位置,Vx、Vy、Vz為發(fā)射系x、y、z軸速度,θ、σ為發(fā)射系下彈道傾角、彈道偏角,D、L、Z、P分別為阻力、升力、側(cè)向力、推力,Mfv為發(fā)射系與速度坐標(biāo)系的轉(zhuǎn)換矩陣,h、r分別為高度、地心距,m為攔截彈質(zhì)量,g0為地表重力加速度,Re為地球半徑,ωe為地球自轉(zhuǎn)角速度,ωex、ωey、ωez為發(fā)射系下地球自轉(zhuǎn)角速度分量。
1.2 問題描述
預(yù)測命中點是預(yù)先計算來襲目標(biāo)和攔截彈的飛行彈道, 確定出瞬時遭遇點, 即預(yù)測命中點, 當(dāng)預(yù)測命中點確定后,就導(dǎo)引攔截彈向其接近。
基于此,預(yù)測命中點規(guī)劃問題可以描述為:結(jié)合預(yù)報彈道與標(biāo)準(zhǔn)彈道族,通過搜索算法尋找滿足時間約束、位置約束的攔截點。并為攔截彈裝訂相應(yīng)的諸元,確保其準(zhǔn)時精確到達(dá)攔截點,如圖1所示。

圖1 攔截示意圖Fig.1 Interception schematic
約束條件如下:
x(tf)=xtf
y(tf)=ytf
z(tf)=ztf
(11)
其中,tf為預(yù)測飛行時間,xtf、ytf、ztf為預(yù)測命中點在發(fā)射坐標(biāo)系下的位置。
考慮到攔截過程有延遲發(fā)射的需求,需要計算發(fā)射時間窗口。發(fā)射窗口是指在基于當(dāng)前標(biāo)準(zhǔn)彈道族,即使推遲發(fā)射,依舊存在預(yù)測命中點可行解的時間區(qū)間。
基于此,時間窗口計算問題可以描述為:結(jié)合目標(biāo)預(yù)報彈道與標(biāo)準(zhǔn)彈道族,通過搜索算法獲得可發(fā)射攔截彈至預(yù)測命中點的延遲時間區(qū)間。
2 預(yù)測命中點規(guī)劃
2.1 現(xiàn)有方法的問題
現(xiàn)有方法普遍基于攔截陣地與目標(biāo)之間的斜距進(jìn)行時間的迭代,通過假設(shè)目標(biāo)飛行器與發(fā)射陣地斜距是不斷縮小,選取時間t0,將目標(biāo)飛行器與發(fā)射陣地斜距ra與攔截彈斜距rd相對比,若ra>rd則t0增加,反之減小,通過迭代的方式獲得ra=rd的時間t1,從而獲得相應(yīng)的攔截彈彈道。而高超聲速飛行器會因為多種因素,導(dǎo)致距離攔截陣地的斜距不單調(diào),即彈目距離不斷縮小的假設(shè)不成立。此時基于上述原則的時間迭代方向可能存在錯誤,這使得依靠現(xiàn)有方法解算預(yù)測命中點時,存在即使有可行解卻搜索不到的問題。
當(dāng)目標(biāo)飛行器基于感知信息發(fā)現(xiàn)攔截陣地,會通過機動遠(yuǎn)離攔截陣地,當(dāng)離開攔截陣地一定距離后再次修正航向。這就導(dǎo)致預(yù)測彈道上存在若干斜距相同的點的情況,使得目標(biāo)飛行器與攔截陣地的斜距時而降低,時而增加。此時如果僅僅考慮斜距ra=rd,依舊采用ra>rd則t0增加,反之減小的迭代原則,可能會導(dǎo)致在時間迭代跳入斜距單調(diào)遞增的區(qū)間后,被提供了錯誤收斂方向,在迭代達(dá)到上限后,輸出錯誤的預(yù)測命中點,導(dǎo)致攔截失敗,如圖2所示。
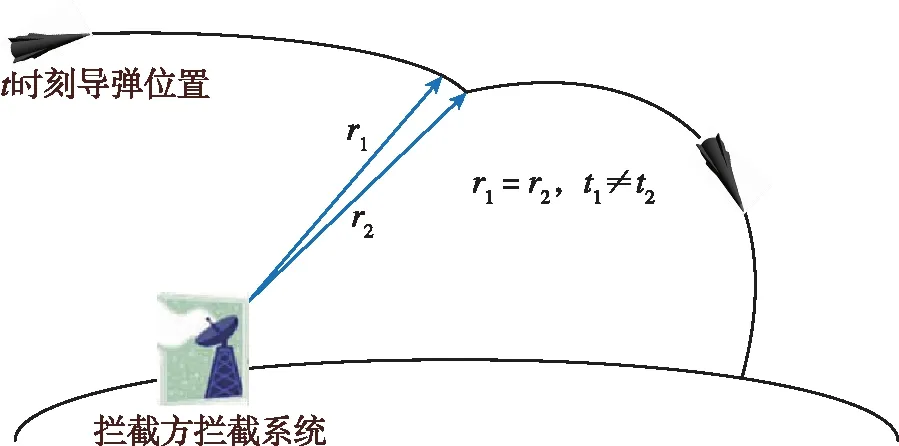
圖2 斜距非單調(diào)示意圖Fig.2 Diagonal non-monotonic sketch
除此之外,目標(biāo)飛行器的打擊目標(biāo)不在攔截陣地的覆蓋范圍內(nèi),目標(biāo)飛行器彈道穿過攔截陣地覆蓋范圍。此時必然存在兩個以上的斜距相同的點,致使斜距不單調(diào),這同樣會導(dǎo)致預(yù)測命中點計算錯誤。
基于以上問題,這里提出了攔截時間區(qū)間的思想,將目標(biāo)與攔截陣地之間的斜距進(jìn)行單調(diào)化處理,確保在攔截區(qū)間內(nèi)任意特定斜距只存在唯一解,來解決斜距解算無法收斂到正確解的問題。
2.2 標(biāo)準(zhǔn)彈道族設(shè)計
標(biāo)準(zhǔn)彈道設(shè)計采用目前工程規(guī)劃方法中典型的多級運載火箭上升段指令生成規(guī)律進(jìn)行設(shè)計。該方法將火箭上升過程分為若干飛行階段,每段設(shè)定固定的程序角變化率指令形式,而這些指令由有限個參數(shù)決定,根據(jù)任務(wù)需求預(yù)先進(jìn)行優(yōu)化得到這些參數(shù)及其對應(yīng)程序指令,裝訂在助推器系統(tǒng)中,上升段飛行過程中利用姿態(tài)控制系統(tǒng)實現(xiàn)程序指令即可。為尋求彈道軌跡的快速生成,將整個上升段分為3段,包括垂直上升段(0-T11)、負(fù)攻角轉(zhuǎn)彎段(T11-T12)、重力轉(zhuǎn)彎段(T12-T13)。
(1)垂直上升段

(12)
式中,1/v0為推重比。
(2)負(fù)攻角轉(zhuǎn)彎段
在轉(zhuǎn)彎段中,T11到T12為負(fù)攻角轉(zhuǎn)彎段,如圖3所示。在之后的大動壓段一般依靠重力的法向分量緩慢的轉(zhuǎn)彎,即重力轉(zhuǎn)彎段(T12~T13)。
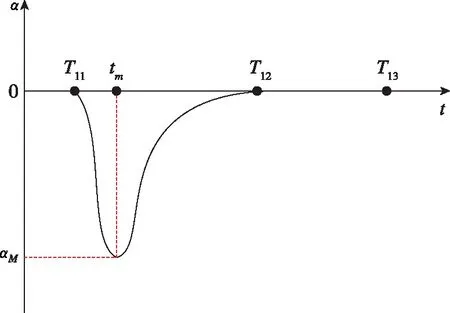
圖3 攻角變化規(guī)律曲線Fig.3 Angle of attack variation with time
在負(fù)攻角轉(zhuǎn)彎段中,根據(jù)實際要求,攻角變化規(guī)律可以由經(jīng)驗公式給出
α(t)=-αm·sin2f(t)
(13)

(3)重力轉(zhuǎn)彎段
此段內(nèi)程序攻角為0°,攔截彈全程飛行俯仰角近似公式為
(14)
當(dāng)確定了T11、T12、T13,所選取的攔截彈彈道控制變量就可以確定為助推段負(fù)攻角大小和發(fā)射方位角。
由此,以攔截陣地為原點(0,0,0)在最大負(fù)攻角區(qū)間αm∈[αmmin,αmmax]中,每隔Δα積分標(biāo)準(zhǔn)彈道,再由tmin開始,將隔條攔截彈道中時間為tmin的點連接,構(gòu)成等時間線,等時間線遵守tmin至tmax每間隔Δt連接一條的原則。由此可以獲得完整的標(biāo)準(zhǔn)彈道族,如圖4所示。

圖4 標(biāo)準(zhǔn)彈道族Fig.4 Standard trajectories collection
2.3 目標(biāo)飛行器攔截時間段劃分
為解決不同時間、斜距相同的問題,需要對目標(biāo)飛行器進(jìn)行攔截區(qū)域劃分,并分段討論。
首先,獲得斜距與時間的關(guān)系,確定一定時間內(nèi)的斜距極值點個數(shù)n與相對應(yīng)的時間tn,由此將攔截時間分為n+1段,時間段為t∈[ti-1,ti],i∈[0,n+1],由此確保在規(guī)定時間段內(nèi),斜距變化是單調(diào)的,不存在斜距相同的可能,如圖5所示。

圖5 目標(biāo)飛行器與攔截陣地斜距-時間圖Fig.5 Range-time diagram of target vehicle and interception position
2.4 基于搜索算法的預(yù)測命中點計算
通過對攔截時間的劃分可以確保在對應(yīng)的時間段內(nèi),目標(biāo)飛行器與攔截陣地的斜距是單調(diào)遞增(遞減)的,可以通過t時刻,目標(biāo)飛行器的經(jīng)緯度與高度與攔截彈的經(jīng)緯度與高度是否相同來迭代預(yù)測命中點時間t與發(fā)射方位角af。但是由于攔截彈的發(fā)射方位角度af∈[0,360],負(fù)攻角α∈[αmin,αmax],產(chǎn)生的標(biāo)準(zhǔn)彈道族巨大,所以逐一時間、逐一標(biāo)準(zhǔn)彈道進(jìn)行對比是不現(xiàn)實的,需要利用標(biāo)準(zhǔn)彈道族的物理特性基于新的搜索算法進(jìn)行預(yù)測命中點搜索,提高運算效率。
攔截彈的可控變量有3個,分別是攔截彈的最大負(fù)攻角、發(fā)射方位角、飛行時間。最大負(fù)攻角與飛行時間共同決定了攔截彈的飛行高度、飛行距離,發(fā)射方位角決定攔截彈的飛行方向。其中飛行方向只與發(fā)射方位角有關(guān),但是剩余兩項存在耦合現(xiàn)象。
因此,搜索算法可以在標(biāo)準(zhǔn)彈道族中先篩選滿足水平航程的攔截時間區(qū)間[tmin,tmax],再根據(jù)目標(biāo)飛行器的飛行高度在攔截時間區(qū)間[tmin,tmax],及負(fù)攻角區(qū)間[αmin,αmax]中搜索滿足高度條件的飛行時間tf及負(fù)攻角α,最后利用tf時刻的目標(biāo)飛行器位置確定發(fā)射方位角af,確定攔截彈的飛行軌跡,從而裝訂發(fā)射諸元。
根據(jù)攔截條件可知,只有全部滿足高度、水平航程、飛行方向條件的攔截彈才具有攔截的能力,缺少任意條件均無法有效攔截。但是一次性完成3個條件的篩選,算法過于復(fù)雜,所以可以率先篩選出滿足水平航程的攔截時間區(qū)間作為攔截時間估計區(qū)域,并在后續(xù)步驟中進(jìn)一步篩選符合高度條件的時間點,確定最大負(fù)攻角,最后計算發(fā)射方位角。具體步驟如下:
(1)初步估計時間區(qū)間[tmin,tmax]
根據(jù)攔截彈的物理特性可知,相同時間內(nèi),最大負(fù)攻角最大的攔截彈軌跡水平航程最大,則通過搜索最大負(fù)攻角最大的攔截彈道與目標(biāo)彈道中同一時刻水平航程誤差最小的點,就可以獲得tmin。
假設(shè)初始飛行時間為t1,并通過目標(biāo)飛行器預(yù)報信息計算出該時刻的發(fā)射方位角,同時獲得t1時刻的目標(biāo)飛行器與攔截陣地的水平距離La1、t1時刻最大負(fù)攻角最大的攔截彈水平距離Ld1,誤差為ΔL1;獲得攔截彈攔截窗口終端t3時刻的目標(biāo)飛行器與攔截陣地的水平距離La3、t3時刻最大負(fù)攻角最大的攔截彈水平距離Ld3,誤差為ΔL3;獲得中間時刻t2的目標(biāo)飛行器與攔截陣地的水平距離La2、t2時刻與最大負(fù)攻角最大的攔截彈水平距離Ld2,誤差為ΔL2。
這里分為4種情況,并設(shè)計搜索算法:
① ΔL1>0, ΔL3>0時,說明該時間區(qū)域內(nèi)沒有攔截的可能,搜索結(jié)束。
② ΔL1<0, ΔL2<0時,說明該時間區(qū)域內(nèi)沒有攔截的可能,搜索結(jié)束。
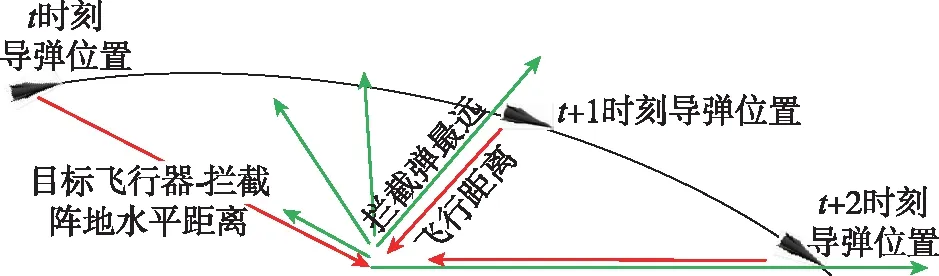
圖6 時間搜索示意圖Fig.6 Time search diagram
確定了tmin,即可利用tmin,縮小tmax的搜索范圍。同理,相同時間內(nèi),最大負(fù)攻角最小的攔截彈軌跡水平航程最小,則通過搜索最大負(fù)攻角最小的攔截彈道與目標(biāo)彈道中同一時刻水平航程誤差最小的點,就可以獲得tmax。
假設(shè)初始飛行時間t1=tmin,并通過目標(biāo)飛行器預(yù)報信息計算出該時刻的發(fā)射方位角,同時獲得t1時刻的目標(biāo)飛行器與攔截陣地的水平距離La1、t1時刻最大發(fā)射傾角的攔截彈水平距離Ld1,兩者誤差為ΔL1;獲得攔截彈攔截時間區(qū)域終端t3時刻的目標(biāo)飛行器與攔截陣地的水平距離La3、t3時刻最大負(fù)攻角最小的攔截彈水平距離Ld3,兩者誤差為ΔL3;獲得中間時刻t2的目標(biāo)飛行器與攔截陣地的水平距離La2、t2時刻與最大負(fù)攻角最小的攔截彈水平距離Ld2,誤差為ΔL2。并再次利用二分法確定最大值tmax。
(2)標(biāo)準(zhǔn)彈道選取
由于前期的發(fā)射時間估計區(qū)域的確立,根據(jù)t∈[tmin,tmax]的目標(biāo)飛行器的位置信息確定t時刻相對應(yīng)的攔截彈發(fā)射方位角af∈[afmin,afmax],根據(jù)目標(biāo)飛行器的高度,確定與目標(biāo)飛行器距離誤差最小的負(fù)攻角α,存儲t時刻ΔLt,最后選取t∈[tmin,tmax]中ΔLt最小的彈道作為攔截彈道。
具體流程圖如圖7、圖8所示。
圖7 篩選流程圖Fig.7 Screening flow
2.5 發(fā)射時間窗口計算
由于攔截任務(wù)的需要,攔截彈可能需要延時發(fā)射,所以有必要計算出可行的攔截彈延時發(fā)射時間區(qū)間以及相關(guān)諸元。
由于攻擊彈與攔截陣地的斜距可以轉(zhuǎn)化為距離攔截陣地的水平距離與垂直距離,同理攔截彈與攔截陣地的斜距也可以轉(zhuǎn)化為距離攔截陣地的水平距離與垂直距離。以水平距離為橫坐標(biāo),垂直距離為縱坐標(biāo),不同標(biāo)準(zhǔn)彈道與預(yù)報彈道的交點就是可能的預(yù)測命中點。由于攻擊彈到達(dá)可能的預(yù)測命中點的時間t4與攔截彈到達(dá)可能的預(yù)測命中點的時間t5是已知的,只要滿足t4>t5就認(rèn)為是可選的預(yù)測命中點。通過比較所有的可選預(yù)測命中點,得到最大的延遲時間Δt=max(t4-t5),則獲得攔截時間窗口t∈[0,Δt],并通過t4時刻的目標(biāo)位置計算出相對應(yīng)的發(fā)射方位角af。
3 仿真分析
3.1 仿真輸入
設(shè)目標(biāo)飛行器初始飛行速度Ma=10,初始為平衡滑翔狀態(tài),60s~80s只進(jìn)行縱向機動,80s~120s只進(jìn)行橫向機動。攔截陣地經(jīng)緯度為(-3.9°,79.8°),目標(biāo)飛行器發(fā)現(xiàn)點經(jīng)緯度為(-2.10°,80.58°),滿足預(yù)報精度誤差的預(yù)報時間為120s,如圖9所示。

圖8 預(yù)測命中點及發(fā)射諸元解算流程圖Fig.8 Flow charts for predicted impact point and launch data calculation
圖9 目標(biāo)軌跡圖Fig.9 Trajectory diagram
3.2 預(yù)測命中點規(guī)劃仿真分析
由于目標(biāo)飛行器可能存在機動,所以斜距與飛行時間不是簡單的線性關(guān)系,需要對目標(biāo)預(yù)報彈道進(jìn)行單調(diào)化處理,具體關(guān)系如圖10所示。
圖10 目標(biāo)飛行器、攔截陣地斜距—時間圖Fig.10 Range-time diagram of target vehicle and interception position
由圖10可見,目標(biāo)飛行器與攔截陣地斜距先降低后增加,所以發(fā)射窗口被分為兩個區(qū)間,分別為t∈[0,90],t∈[90,120]。
在t∈[0,90]區(qū)間內(nèi),通過迭代發(fā)現(xiàn)在89s時,發(fā)射方位角為-35.73°,負(fù)攻角為-10.26°,預(yù)測命中點為(-3.6°,79.7°),此時采用標(biāo)稱彈道的攔截彈與目標(biāo)的預(yù)報位置誤差為0.52km,可以通過后續(xù)的末制導(dǎo)環(huán)節(jié)進(jìn)行修正,認(rèn)為符合攔截條件,如圖11所示。
圖11 攔截示意圖Fig.11 Interception schematic
在t∈[90,120]區(qū)間內(nèi),通過迭代沒有發(fā)現(xiàn)滿足當(dāng)前時刻發(fā)射的攔截點,所以符合命中條件的預(yù)測命中點只有一個,為(-3.6°,79.7°),計算用時0.2s。
3.3 攔截時間窗口計算仿真分析
通過對發(fā)射窗口計算,發(fā)現(xiàn)最大延遲時間為11s,發(fā)射方位角為-82.19°,負(fù)攻角為-12.25°,預(yù)測命中點(-3.9°,79.4°),此時采用標(biāo)稱彈道的攔截彈與目標(biāo)的預(yù)報位置誤差為0.34km,同樣可以通過后續(xù)的末制導(dǎo)環(huán)節(jié)進(jìn)行修正,計算用時0.3s,如圖12所示。
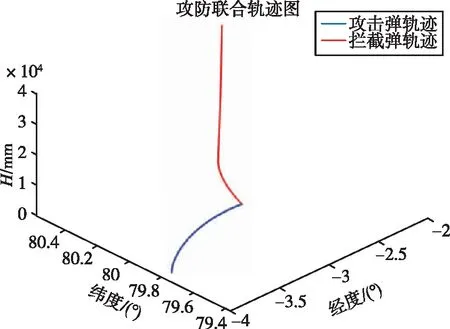
圖12 最大延遲時間攔截示意圖Fig.12 Maximum delay time interception diagram
針對拋物線彈道延遲發(fā)射諸元如表1所示。
由表1可知,由雷達(dá)首次發(fā)現(xiàn)目標(biāo)的時刻至隨后的11s內(nèi),隨著攔截高度的降低,最大負(fù)攻角幅值變大。同時所有選取的時間節(jié)點均有攔截彈道可以準(zhǔn)時飛抵預(yù)測命中點,可以認(rèn)為在0s~11s這個攔截窗口內(nèi)攔截窗口時間連續(xù),所有的預(yù)測命中點均有標(biāo)準(zhǔn)彈道與其相對應(yīng)。
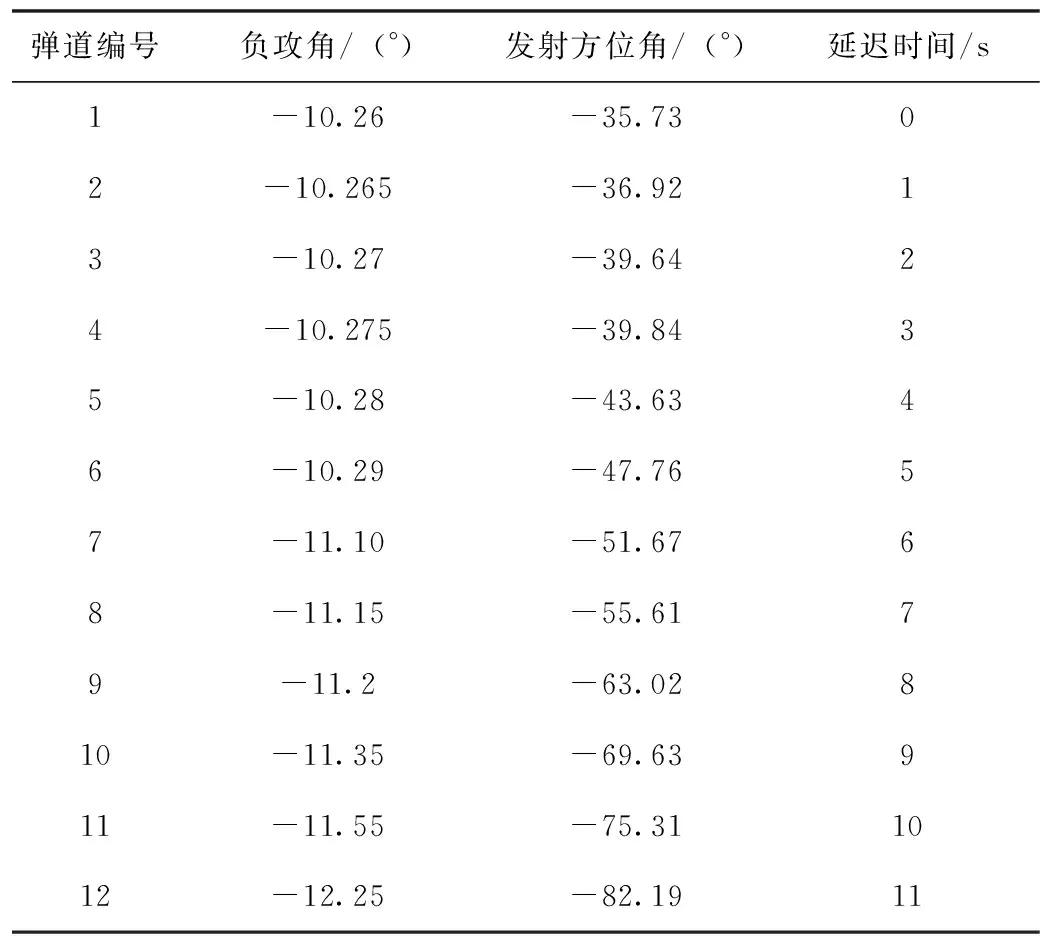
表1 延時發(fā)射諸元表
4 結(jié)論
本文針對臨近空間高機動飛行器機動能力強,所帶來的彈道中存在多個斜距相同的點,導(dǎo)致基于斜距迭代預(yù)測命中點的方法不適用的問題,通過彈道劃分的方法,保證了每個搜索區(qū)間的斜距具有單調(diào)性。在此基礎(chǔ)上利用改進(jìn)的快速搜索算法,準(zhǔn)確有效地完成預(yù)測命中點規(guī)劃與發(fā)射時間窗口計算。考慮高超聲速飛行器預(yù)報精度差,所帶來的更新后的預(yù)測命中點與原有預(yù)測命中點位置偏差較大的問題,未來將開展攔截彈道在線快速糾偏方法的研究,來彌補此方面的不足。
