液罐車精確動力學建模及其側傾穩定性
2020-04-08 13:28:12任園園李顯生鄭雪蓮
上海交通大學學報 2020年3期
關鍵詞:模型
任園園, 李顯生, 鄭雪蓮, 王 杰
(吉林大學 交通學院, 長春 130022)
液罐車流固耦合系統具有無限多自由度的特點.在液體晃動流體動力學模型基礎上構建的整車動力學模型雖能準確描述罐車動力學特性,但模型求解困難,且難以應用到車輛主動安全控制領域[1-2].因此,構建結構簡單、準確性高的液罐汽車動力學模型十分重要.
對液體晃動動力學特性的處理直接關系到罐車動力學模型的準確性和應用難易程度.將液體晃動進行一定簡化,并在簡化模型的基礎上構建罐車動力學模型是常用方法,其中液體晃動準靜態模型和等效剛體模型最為常見.準靜態模型利用液體靜力平衡微分方程估計每一時刻的自由液面傾斜度,并據此計算瞬時液體質心位置,將液體團看作固體,并按固體方式計算沖擊力和力矩.文獻[3-7]利用準靜態模型與車輛側翻靜平衡方程結合,考察罐車側翻閾值.文獻[8]將車輛動力學模型分別與準靜態模型和等效剛體模型相結合,考察了液體晃動的響應成分對車輛操縱響應的影響.文獻[9-10]基于準靜態模型分析了罐體形狀對車輛側傾穩定性的影響,獲得了最佳罐體形狀及其尺寸.準靜態方法只考慮了液體流動所導致的質心移動,其結果并未體現沖擊力和力矩的動態特性,因此,在此基礎上獲得的罐車行駛穩定性分析結果過于保守,與實際偏差較大.
等效剛體模型利用剛體運動描述液體晃動,其與液體晃動具有動力相似、運動相似和幾何相似的特征,能夠產生與液體晃動相同的沖擊力、沖擊力矩和質心位移.文獻[11]利用彈簧模型估計了液罐車上/下坡、顛簸道路上行駛時的縱向動力學特性.文獻[8,11-12]利用單擺模型求解液體沖擊力/力矩,并將其添加到車輛本體的動力學模型中,以此探究罐車側傾穩定性.文獻[13-15]利用橢圓規鐘擺模型描述圓柱/橢圓柱罐體內的側向液體晃動,并利用Working Model建立罐車平面運動的動力學方程研究罐車操縱響應.文獻[16-20]完善了橢圓規鐘擺模型的參數,擴大了模型在罐體充液比和側向激勵強度上的適用范圍.文獻[21-22]在單質量橢圓規擺模型的基礎上,推導了多質量橢圓規鐘擺模型,提高了液體側向晃動的表達精度.基于等效剛體模型的罐車動力學模型能準確反映罐車動力學特性,且與普通載荷汽車的動力學模型類似,受到了業界的廣泛認可.
然而,現有的基于液體晃動等效剛體模型的罐車動力學模型仍存在如下不足:① 多使用單擺描述圓柱罐體內的液體晃動,研究對象僅限于裝載圓柱罐體的罐車,無法擴展至裝配橢圓柱罐體的車輛[10-12].② 建模時未考慮液體晃動與車輛運動的耦合關系,所建罐車模型與實際情況有較大出入[10, 12, 16-21].在計算沖擊力/力矩時,將液體晃動的罐體參照系按慣性參照系處理,利用慣性參照系下等效剛體模型的動力學方程計算沖擊力/力矩,并將其添加到車輛本體的動力學模型中.實際上,罐體作為罐車的一部分,是一個既有沿車輛側向的加速平動,又有繞車輛側傾軸的加速轉動的非慣性坐標系.液體晃動所產生的沖擊力/力矩應利用非慣性坐標系中等效剛體模型的動力學方程推導而來.③ 液體晃動的等效剛體模型未考慮液體晃動的衰減特性.
為此,本文利用橢圓規鐘擺模型描述常見的圓柱/橢圓柱罐體內的側向液體晃動,推導罐體非慣性坐標系下,考慮液體晃動阻尼特性的橢圓規鐘擺的動力學方程;在此基礎上,將車輛本體和液體貨物看作一個整體,以罐體作為兩者聯系的紐帶,通過整車受力分析,建立液罐汽車整車動力學模型.最后,利用所建模型研究罐車動力學響應.
1 液體側向晃動動力學方程
1.1 液體側向晃動等效橢圓規鐘擺模型
研究對象為裝載圓柱/橢圓柱罐體的液罐汽車.利用Fluent數值求解圓柱/橢圓柱罐體內的液體側向晃動,記錄液體晃動中的質心位置及側向沖擊力,據此進行液體晃動的動力學特性研究.
根據液體側向晃動的動力學特性,使用橢圓規鐘擺模型描述圓柱/橢圓柱罐體內的液體晃動,如圖1所示[15-17].圖中:Otytzt為罐體坐標系;a,b分別為罐體橫截面的長軸和短軸半徑;acg,bcg分別為液體質心運動軌跡的長軸和短軸半徑;ap,bp分別為鐘擺小球C運動軌跡的長軸和短軸半徑;bf為靜止液體質心到罐體最低點的垂向距離;θ為鐘擺小球的擺動角度.橢圓規鐘擺的一端(A)只能沿罐體垂直軸運動,中部一點(B)只能沿罐體水平軸運動,由此自由端(鐘擺小球C)的運動軌跡為橢圓弧.當B與A重合時,橢圓規鐘擺退化為單擺,自由端的運動軌跡為圓弧.
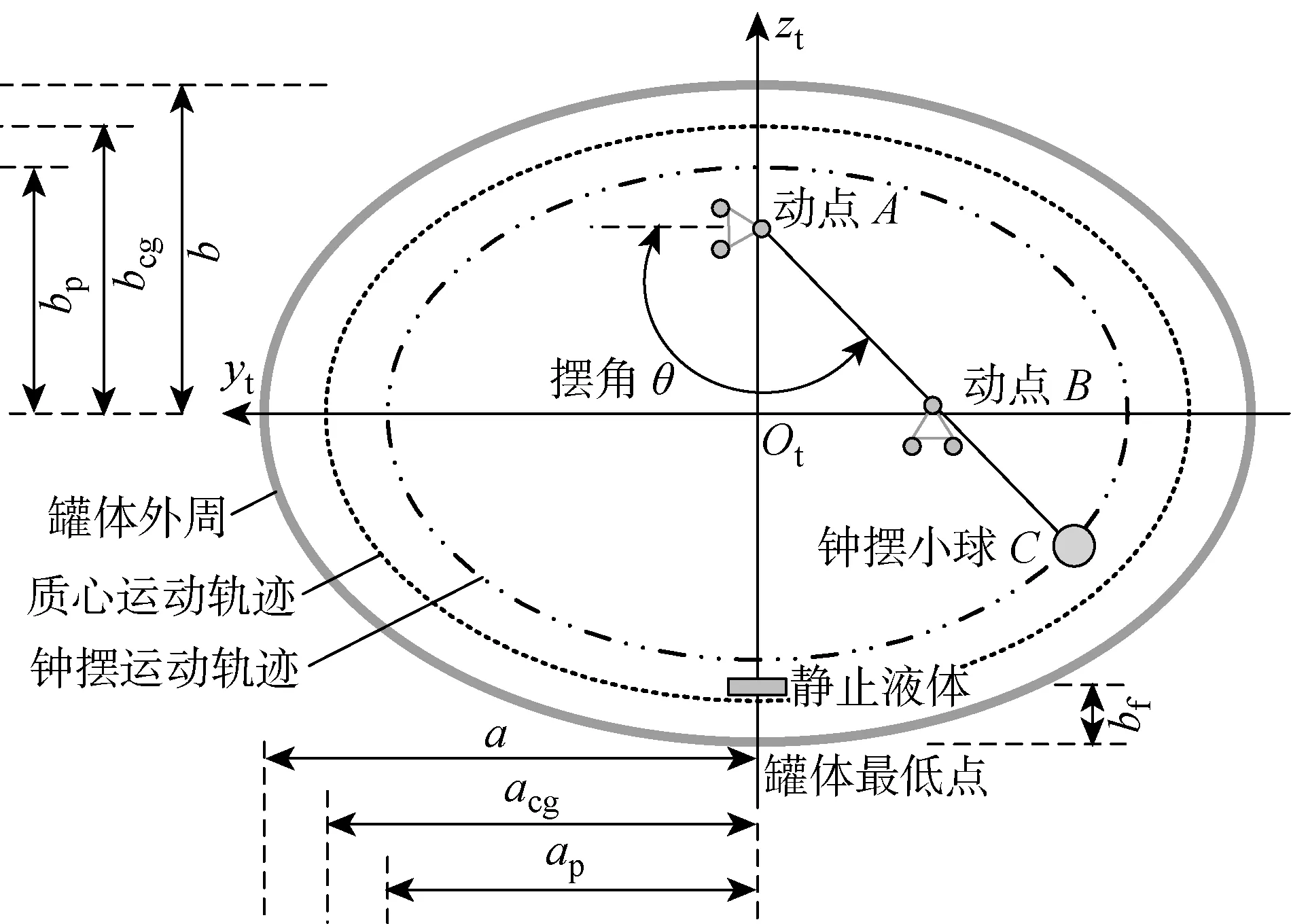
圖1 側向液體晃動的等效橢圓規鐘擺模型
在罐體形狀、充液比和外界激勵強度相同的條件下,鐘擺應與液體晃動具有相同的動力學特性(振蕩頻率相同,沖擊力和繞同一點的力矩相等).借助動力學等價原則,推導橢圓規鐘擺的擺線長度,鐘擺小球的質量等與液體晃動特性之間的關系為[15]
(1)
式中:g為重力加速度;ω為液體側向沖擊的角頻率;ζ為罐體橫截面的長短軸之比;mp為鐘擺小球的質量;Fs為一個周期內液體沖擊力的峰值;as為液罐車簧上質量的側向加速度;max(mas)為假設全部液體均參與沖擊時,其在一個周期內所產生的最大側向沖擊力;mf為不參與沖擊的靜止液體質量;m為罐內全部液體質量.
借助Fluent仿真所獲得的液體沖擊頻率和沖擊力,獲得鐘擺的擺線長度和鐘擺小球的質量關于罐體形狀和充液比的多項式函數為
bp/b=1.087+0.699 9Δ-0.140 7ζ-0.929 1Δ2-
1.178ζΔ+0.054 95ζ2-0.033 53Δ3+
0.540 4ζΔ2+0.151 8ζ2Δ
(2)
mp/m=0.784 4-1.729Δ+0.335 1ζ+1.156Δ2+
0.725 6ζΔ-0.125 4ζ2-0.321 9Δ3-
0.915 2ζΔ2+0.080 43ζ2Δ
(3)
式中:Δ為罐內貨物的充液比(液面高度與罐體高度的比值,無量綱).
在罐體形狀和充液比已知的條件下,利用式(1)~(3)即能獲得鐘擺模型相關參數.
1.2 慣性坐標系下橢圓規鐘擺的動力學方程
自由振蕩條件下,作用在鐘擺小球上的力只有重力和擺線拉力.當鐘擺擺線與罐體縱軸的夾角為θ時,鐘擺小球沿側向和垂向的受力平衡可表示為
(4)

(5)
式中:Hf為車輛靜止時罐體中心到側傾軸的高度.
對式(5)進行二次求導,可獲得鐘擺小球沿側向和垂向的加速度.將其帶入式(4)并消除變量FL,即可獲得鐘擺在慣性坐標系下的動力學方程:
(6)
利用線性阻尼模型描述側向液體晃動的阻尼特性,并利用拉格朗日方程將線性耗散元件添加到式(6)中,得到有阻尼耗散特性的橢圓規鐘擺在慣性坐標下的動力學方程為
(7)
式中:η為液體側向晃動的無量綱阻尼系數.
1.3 非慣性坐標系下橢圓規鐘擺的動力學方程
在慣性坐標系下,鐘擺運動僅受初始擺角的影響.實際上,液體晃動發生在運動的罐體內.作為車輛的一部分,罐體既有沿車輛側向的加速平動,也有繞車輛側傾軸的加速轉動.液體晃動的參照系是既有平動又有轉動的非慣性坐標系,除初始擺角外,液體晃動還受到車輛運動的影響.
非慣性坐標系下,自由振蕩鐘擺小球的絕對加速度由相對加速度、牽連加速度和科氏加速度3部分組成:
aa=ar+ae+ac
(8)
式中:ar為鐘擺小球在非慣性坐標系中的相對加速度;ae為動系相對于靜系的牽連加速度;ac為動系相對于靜系的科氏加速度.
動系既有平動又有轉動時,其與慣性參照系的牽連加速度可表示為
ae=ay+[α×R+ω×(ω×R)]
(9)
式中:ay為動系相對于靜系的側向平動加速度;α為動系的轉動角加速度;R為鐘擺小球的位置矢量;ω為動系的轉動角速度.
動系轉動所引起的科氏加速度可表示為
ac=2ω×vr
(10)
式中:vr是橢圓規鐘擺小球在動系中的運動速度.
利用式(9)和(10),可獲得鐘擺小球在非慣性坐標系中的絕對加速度為
(11)
式中:v為罐車前進速度;β為罐車質心側偏角;r為罐車橫擺角速度;φ為罐車車身側傾角;e2為液體質心沿整車坐標系x軸的坐標.
將式(11)代入式(4)并消除FL,結合式(7),獲得橢圓規鐘擺在非慣性坐標系下的動力學方程:
(12)
2 液罐汽車動力學模型構建
2.1 前提與假設
為方便建立罐車動力學建模,作出如下規定和假設:
(1)罐車簧上質量為車輛整備狀態下的簧上質量,不包含貨物質量;
(2)罐車簧上和簧下質量關于車輛縱軸左右對稱,其質心在車輛坐標系的y軸上;
(3)僅考慮車輛的側向運動,不考慮液體沿車輛縱向的沖擊以及由于橫擺而產生的扭轉運動.
以r、β、φ及θ為自由度,構建罐車4自由度動力學模型.

圖2 液罐汽車側向受力分析
2.2 液罐汽車側向力平衡方程
車輛左轉時,作用在液罐汽車上的側向慣性力和外力如圖2所示.圖中:mt為液罐車簧上質量;mu為液罐車簧下質量;au為液罐車簧下質量的側向加速度;af為罐體內靜止液體質量的側向加速度;apend為鐘擺小球的側向加速度;Ff為前軸輪胎側偏力;Fr為后軸輪胎側偏力.
車輛穩態轉向時,側向慣性力和外力保持平衡:
mtas+muau+mfaf+mpapend=2(Ff+Fr)
(13)
式(13)中,各部分的側向加速度為
(14)
式中:H為鐘擺小球到側傾軸的高度,H=Hf-bpsinθ;hs為液罐車簧上質心到側傾軸的高度;c,e分別為液罐車簧上和簧下質心沿整車坐標系x軸的坐標;H1為靜止液體質心到側傾軸的高度.
由此,液罐車側向力平衡方程可表示為
2(Ff+Fr)-vr(mt+mu+mf+mp)+
(15)
2.3 液罐汽車橫擺力矩和側傾力矩平衡方程
2.3.1簧上質量慣性力矩 在簧上質量質心處建立與車輛坐標系平行的坐標系xsyszs.簧上質量關于xs軸左右對稱,因而有Ixys=Iyzs=0.求解簧上質量關于其質心坐標系的角動量,并對角動量求導,得到簧上質量關于其質心坐標系的慣性力矩為
(16)
式中:Izs,Ixzs,Ixs分別為簧上質量繞其質心坐標系的轉動慣量;is,js,ks分別為沿xs,ys,zs正方向的單位向量.
2.3.2簧下質量慣性力矩 在簧下質量質心處建立與車輛坐標系平行的坐標系xuyuzu.簧下質量關于xu軸對稱并且不計及簧下質量的高度,因而有Ixyu=Iyzu=Ixzu=0.求解簧下質量關于其質心坐標系的角動量,并對其求導,獲得簧下質量關于其質心坐標系的慣性力矩為
(17)
式中:Izu為簧下質量繞其質心坐標系的轉動慣量;ju,ku分別為沿yu,zu正方向的單位向量.
2.3.3液體貨物慣性力矩 在液體質心處構建與車輛坐標系平行的貨物坐標系xcyczc.假設鐘擺小球的轉動慣量等于罐內全部液體的轉動慣量,而靜止液體的轉動慣量為0.研究發現液體貨物的慣性積數值較小,而轉動慣量的數值較大.因此,忽略液體貨物的慣性積.
求解液體貨物關于其質心坐標系的角動量,并對角動量求導,得到液體貨物關于其質心坐標系的慣性力矩:
(18)
式中:Ixc,Izc分別為液體貨物關于其質心坐標系的側傾和橫擺轉動慣量;ic,jc,kc分別為沿xc,yc,zc正方向的單位向量.
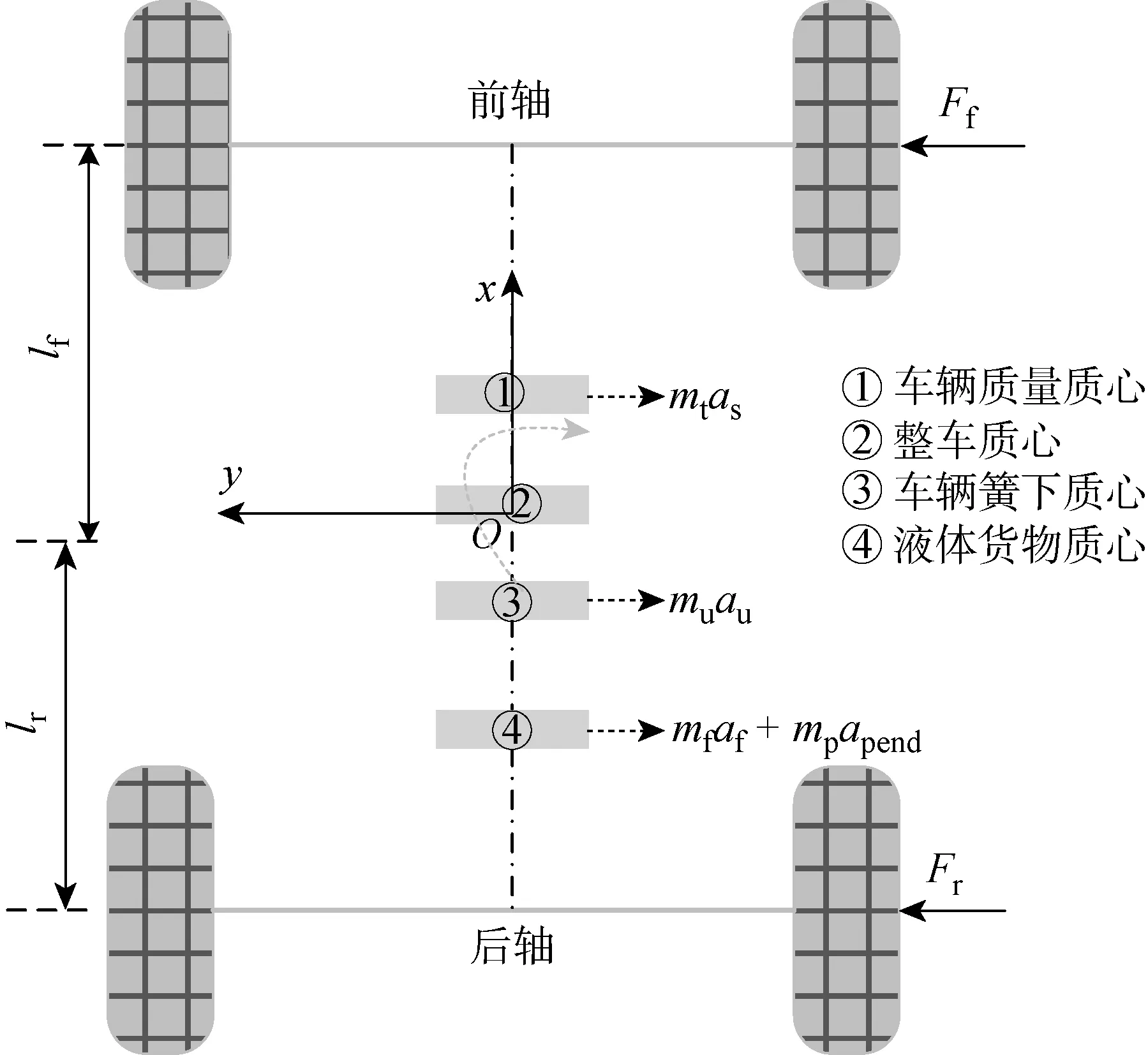
圖3 液罐汽車橫擺力矩分析
2.3.4液罐汽車橫擺力矩平衡方程 作用于液罐汽車上的側向慣性力、橫擺慣性力矩以及側向外力如圖3所示.車輛穩態轉向時,繞車輛z軸的慣性橫擺力矩和外力矩保持平衡.慣性橫擺力矩可利用式(16)~(18)中k向分力矩獲得.由此,液罐車慣性橫擺力矩和外力矩的平衡方程為
mfe2af+mpe2apend=2(Fflf-Frlr)
(19)
式中:lf,lr分別為車輛裝載貨物后整車質心到前軸和后軸的距離.將各部分質量的側向加速表達式代入式(19)得液罐汽車的橫擺力矩平衡方程:
2(Fflf-Frlr)-vr(mtc+mue+mfe2+mpe2)+
(20)
2.3.5液罐汽車側傾力矩平衡方程 作用于液罐汽車上的側傾慣性力、側傾慣性力矩和側傾外力如圖4所示.車輛穩態轉向時,繞車輛x軸的慣性側傾力矩和外力矩保持平衡.據此,獲得罐車慣性側傾力矩和外力矩的平衡方程為
mpgapcosθ
(21)
式中:kφ為懸架角剛度;cφ為懸架角阻尼.
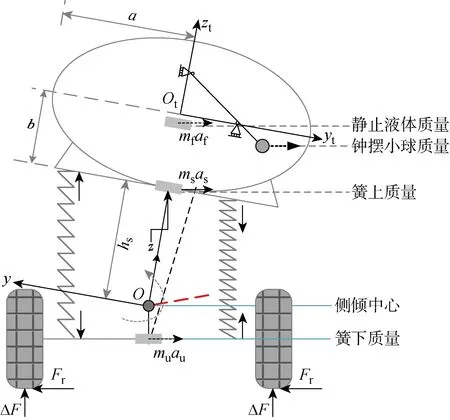
圖4 液罐汽車側傾力矩分析
將各部分質量的側向加速度表達式代入式(21)后獲得液罐汽車的側傾力矩平衡方程:

φg(mths+mfH1+mpH)+
(mths+mfH1+mpH)vr-
(22)
綜上,由式(12),(15),(20),(22)構成液罐汽車的4自由度動力學模型.模型自由度有4個,分別為車輛本體的橫擺角速度、質心側偏角、車身側傾角以及鐘擺擺角.
3 液罐汽車動力學特性分析
基于所構建的液罐汽車動力學模型,在TruckSim中搭建用于仿真分析的液罐車模型.TruckSim中液罐車模型的搭建包括車輛本體設置、靜止液體質量的施加、鐘擺的參考點設定以及鐘擺模型VS Command指令編寫4部分.
以一款常用罐車為例,其車長為8.6 m,罐體橫截面面積為2.5 m2,罐體長度為5.8 m;車輛驅動形式為6×4,后輪驅動,后軸為并裝雙輪.設定液體貨物的密度為 1 000 kg/m3.其他基本參數如表1所示.
設計了3種橢圓柱罐體,其長短軸之比分別為1,1.5及2(國標規定橢圓柱罐體的長短之比不得超過2).罐體尺寸如表2所示.
選取與罐車具有相同基本參數和貨箱橫截面積的普通載貨汽車(NT)為對比車輛.貨箱橫截面為正方形.載貨量同樣用充液比(貨物高度與貨箱高度的比值)描述.在相同的充液比條件下,罐車與普通載貨汽車具有相同的載質量.
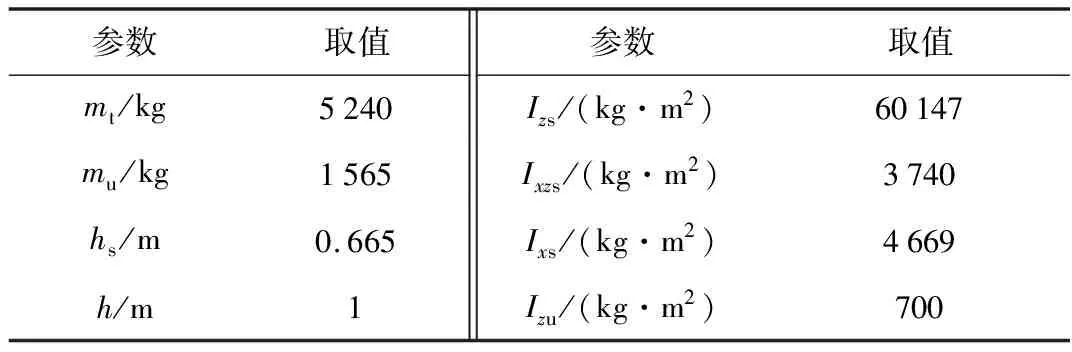
表1 液罐汽車基本參數
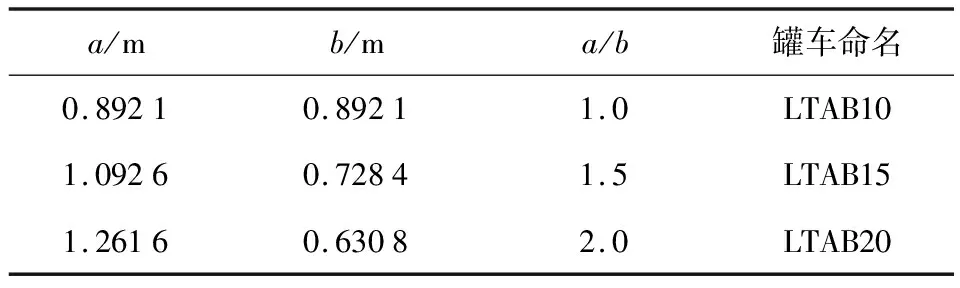
表2 罐體尺寸
選擇角階躍試驗研究車輛的動力學響應.試驗中,車輛的方向盤轉角為180°,階躍時間1.0 s,轉向系傳動比約為25∶1.
3.1 車輛操縱響應
車輛行駛速度為25 km/h,充液比為0.5時,角階躍試驗下液罐汽車與普通載貨汽車的動力學響應如圖5所示,圖中t為時間,lmax為輪胎最大橫向載荷轉移率.
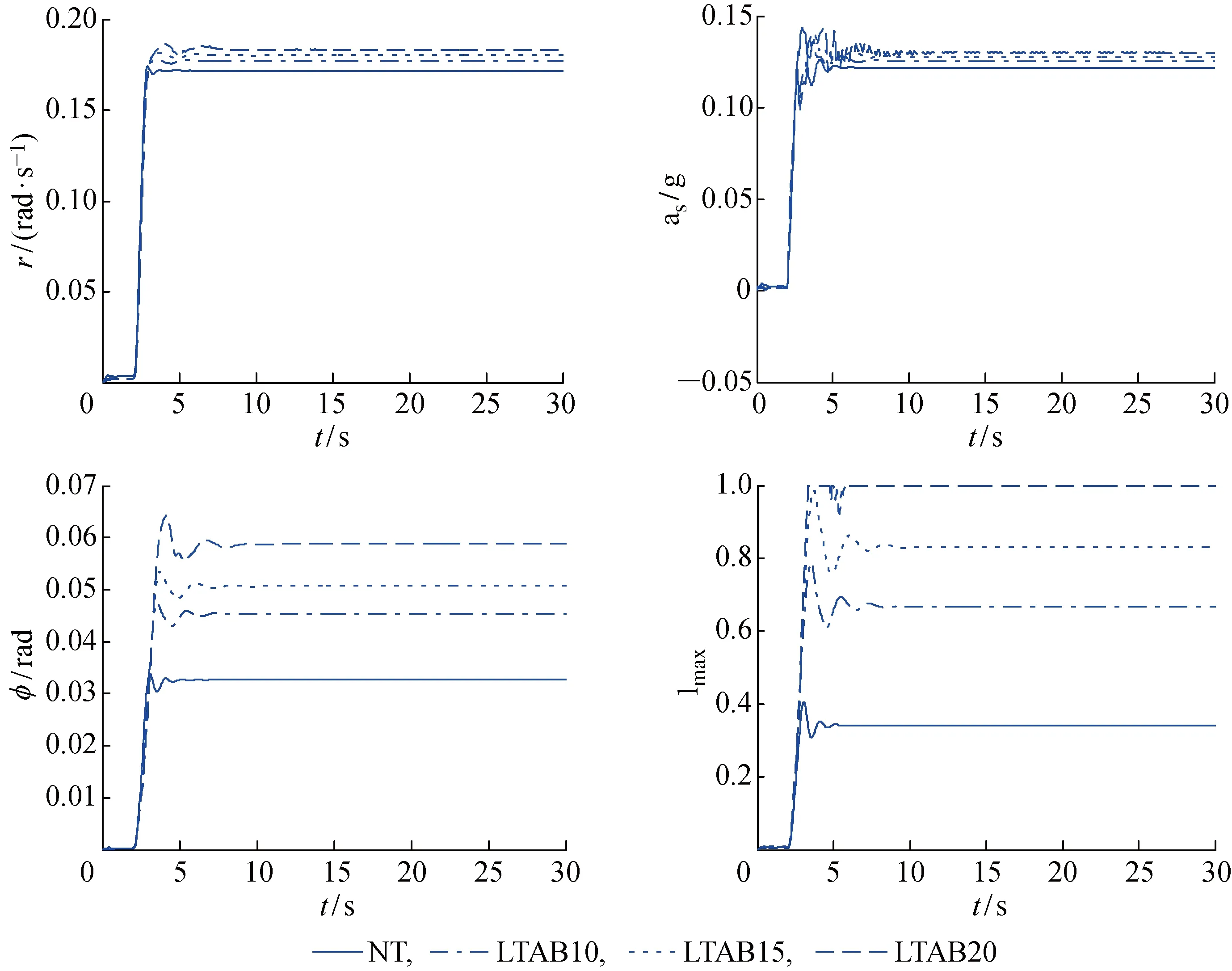
圖5 液罐汽車與普通載貨汽車的角階躍響應
與普通載貨汽車相比,液罐汽車的側向和側傾穩定性均有不同程度的下降.其中,側向穩定性(橫擺角速度和側向加速度)的下降幅度較小,約為4.5%~8.2%;側傾穩定性(橫向載荷轉移率和車身側傾角)的下降幅度較大,約為40%~200%.
在該試驗條件下,LTAB10的車身側傾角和輪胎最大載荷轉移率最大,LTAB15次之,LTAB20具有最小的車身側傾角和輪胎最大轉移率.此時,罐體長短軸之比越大,罐車側傾角和橫向載荷轉移率越大,表明罐體形狀對液罐車的側傾穩定性有很大影響.
3.2 車輛臨界穩定車速
角階躍試驗條件下,液罐車與普通載貨汽車的臨界穩定車速如圖6~7所示,圖中vth為臨界穩定車速,δ為液罐車與普通載貨汽車在相同工況下的臨界穩定車速的偏差.
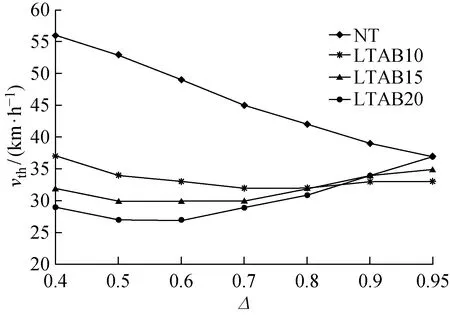
圖6 液罐車與普通載貨汽車的臨界穩定車速
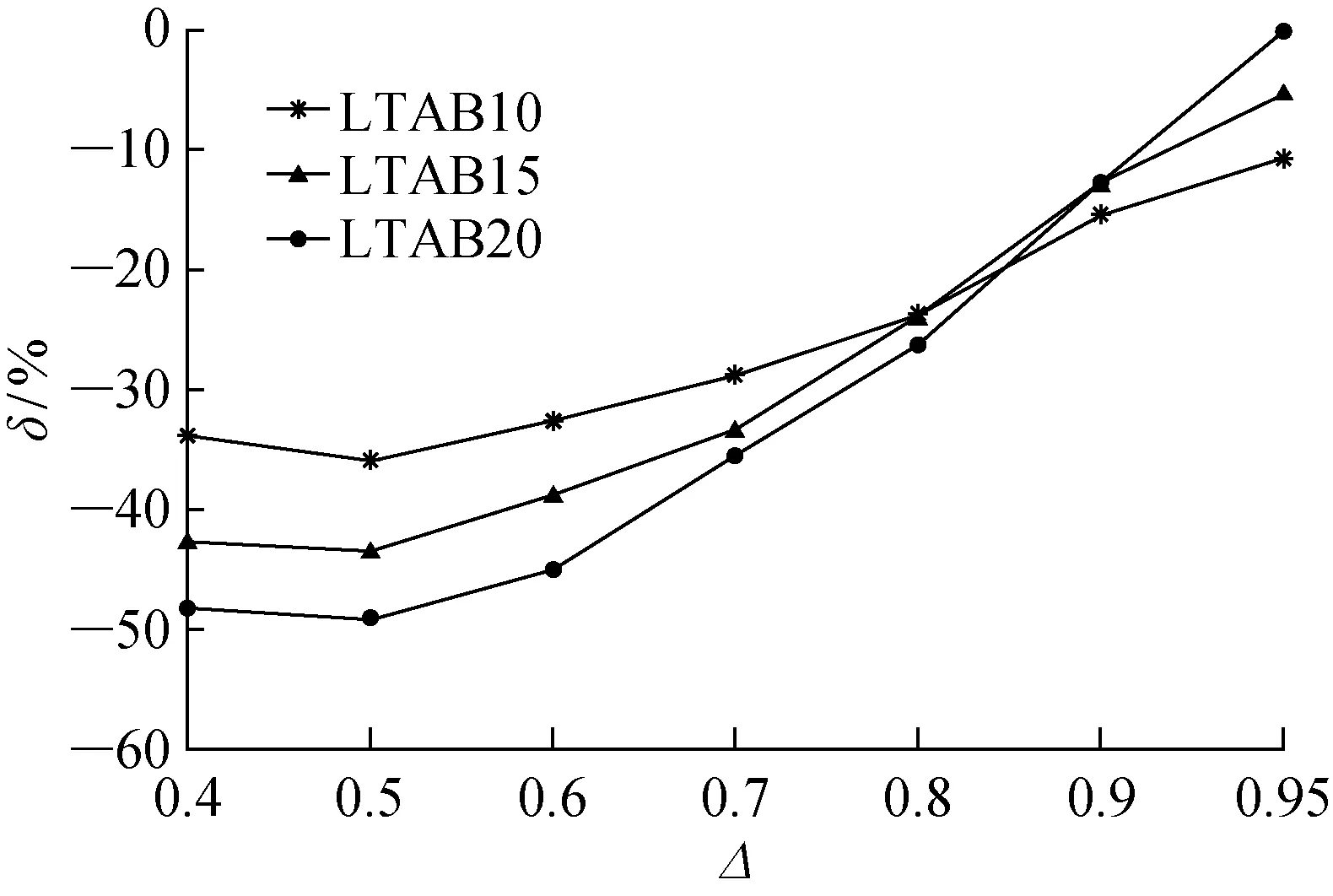
圖7 液罐車與普通載貨車相比的臨界穩定車速的下降幅度
與普通載貨汽車相比,液罐汽車的臨界穩定車速有大幅下降.在充液比小于0.7時,液罐車臨界穩定車速的下降幅度均大于30%.
對于普通載貨汽車,臨界穩定車速隨著充液比的增加而逐漸下降;對于液罐汽車,隨著充液比的增加,臨界穩定車速呈先下降,后略有上升的趨勢.充液比為0.5時,罐車臨界穩定車速僅為普通載貨汽車的50%~65%.可見充液比為0.4~0.7時罐車處于較差的裝載狀態.
罐體形狀會對液罐汽車行駛穩定性產生重要影響.充液比小于0.8時,罐體的長短軸之比越小,罐車臨界穩定車速越高;充液比大于0.8時,罐體長短軸之比越大,罐車臨界穩定車速越高.實際生產中,如果罐體充液比絕大多數情況下都在0.8以上,推薦罐車裝配長短軸之比較大的橢圓柱罐體.如果罐體充液比會在較大范圍內變化,則推薦罐車裝配圓柱罐體.
根據式(22),在相同的沖擊條件下,鐘擺小球質量mp及其長軸半徑ap決定了鐘擺的沖擊強度.求解鐘擺小球質量與整車質量的比值以及鐘擺長軸半徑與罐體長軸半徑的比值,分別如圖8和圖9所示.充液比從0.1增加至0.9時,質量比值呈先上升、后下降的趨勢,該趨勢與液罐車臨界穩定車速的變化趨勢相反;而半徑比值呈單調下降的趨勢.因此,參與沖擊的液體質量占罐車總質量的比值是影響液罐車行駛穩定性的關鍵.
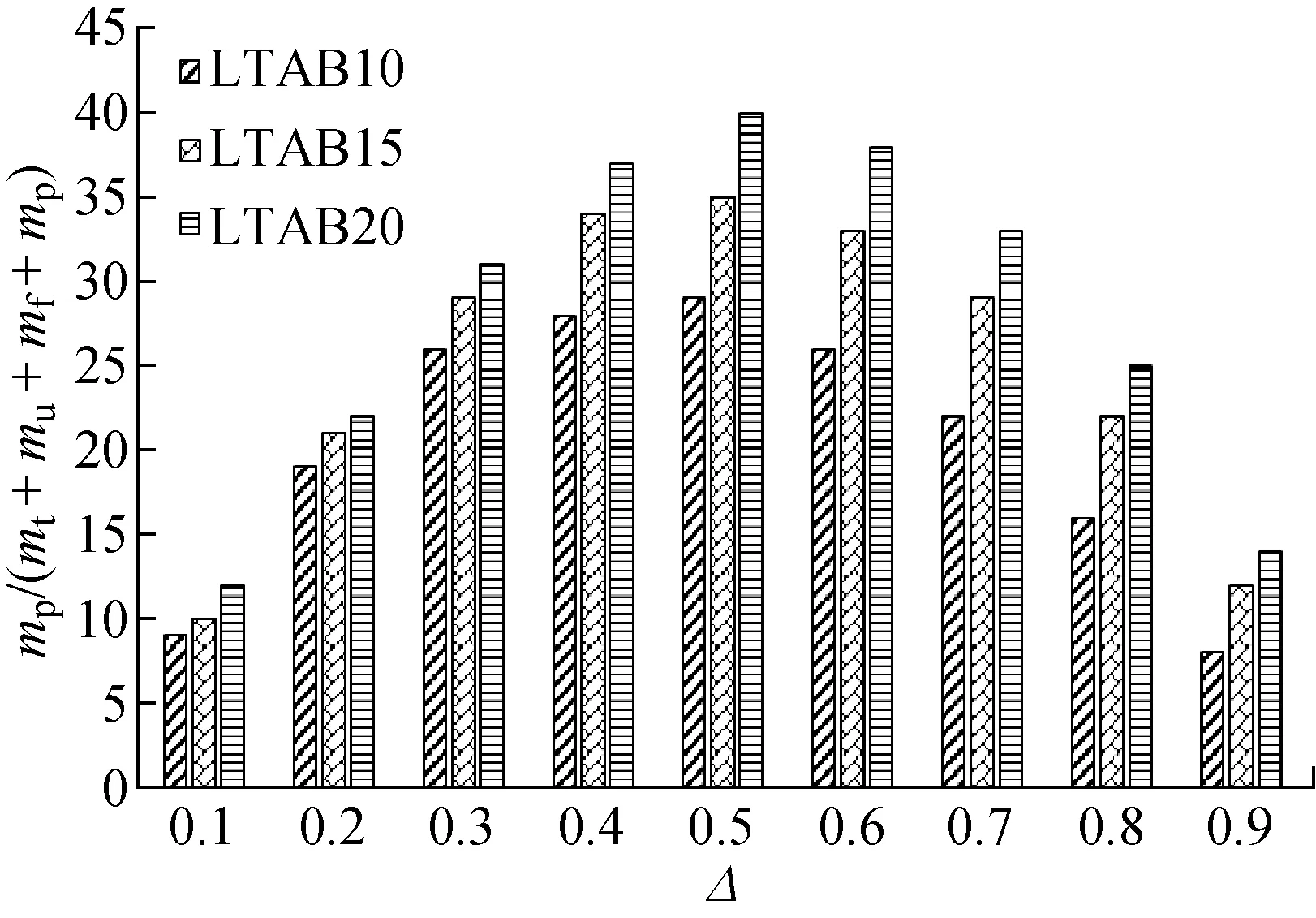
圖8 鐘擺小球質量與罐車總質量的比值
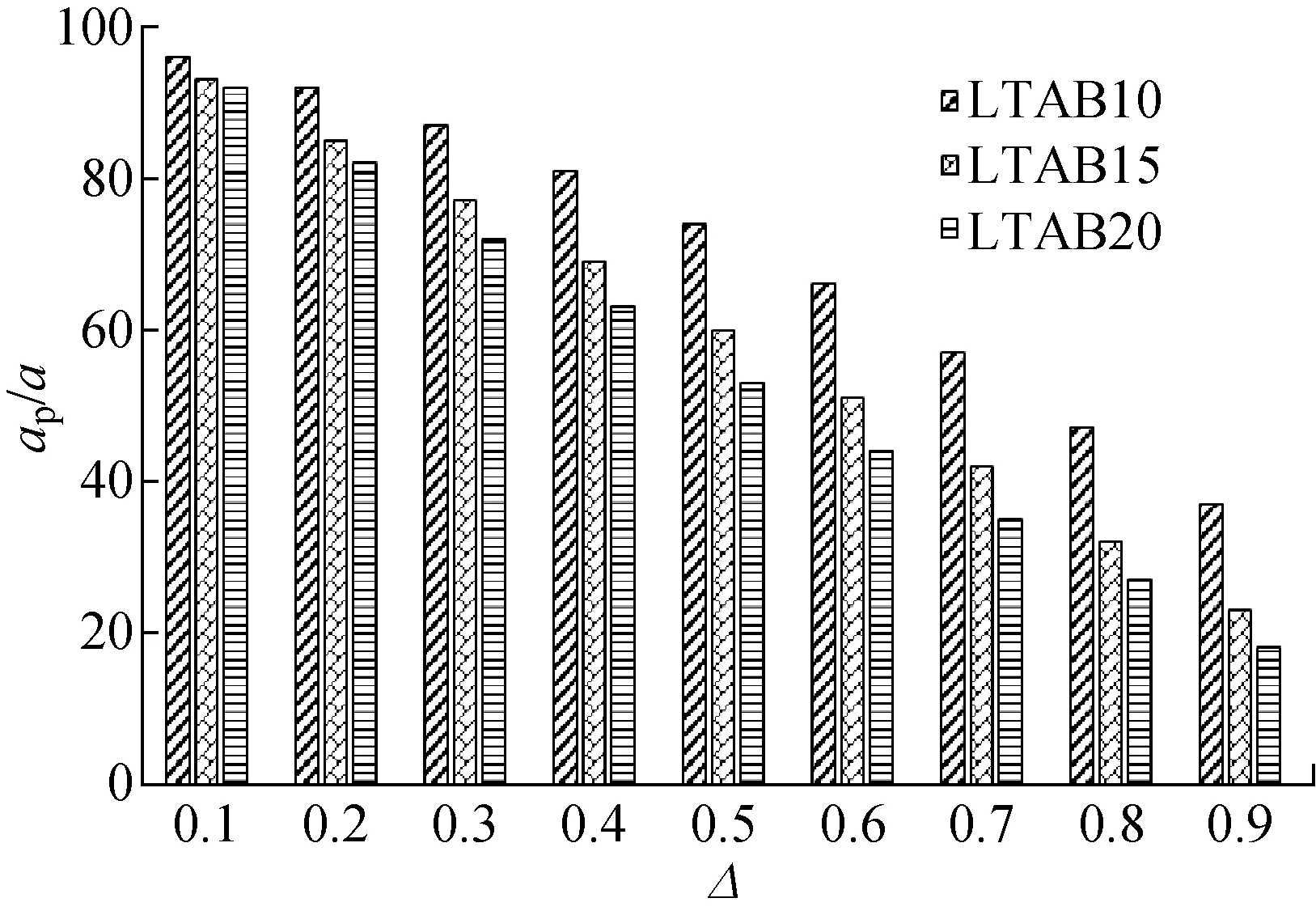
圖9 鐘擺短軸半徑與罐體短軸半徑的比值
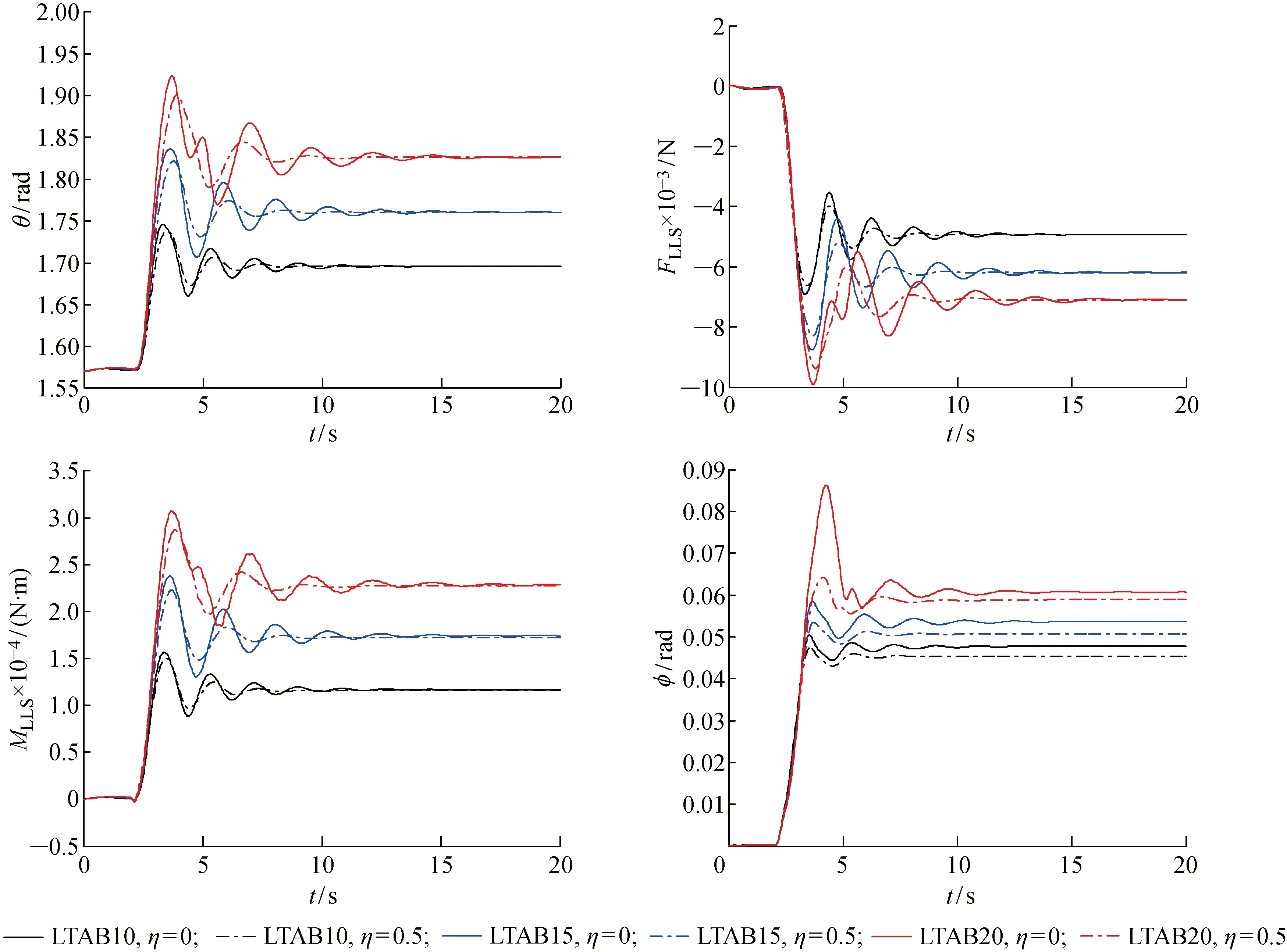
圖11 無量綱阻尼系數對液體晃動及液罐車動力學響應的影響
3.3 車輛過多轉向特性
車輛行駛速度為25 km/h,試驗條件為角階躍下,與普通載貨汽車相比,液罐汽車的轉彎半徑有所下降(見圖10),圖中δ′為液罐車與普通載貨汽車在相同工況下的轉彎半徑的偏差.罐車表現出輕微的過多轉向特性.充液比為0.4~0.5時,罐車轉彎半徑的下降幅度最大,其過多轉向特性最顯著;且罐體長短軸之比越大,罐車過多轉向越嚴重.
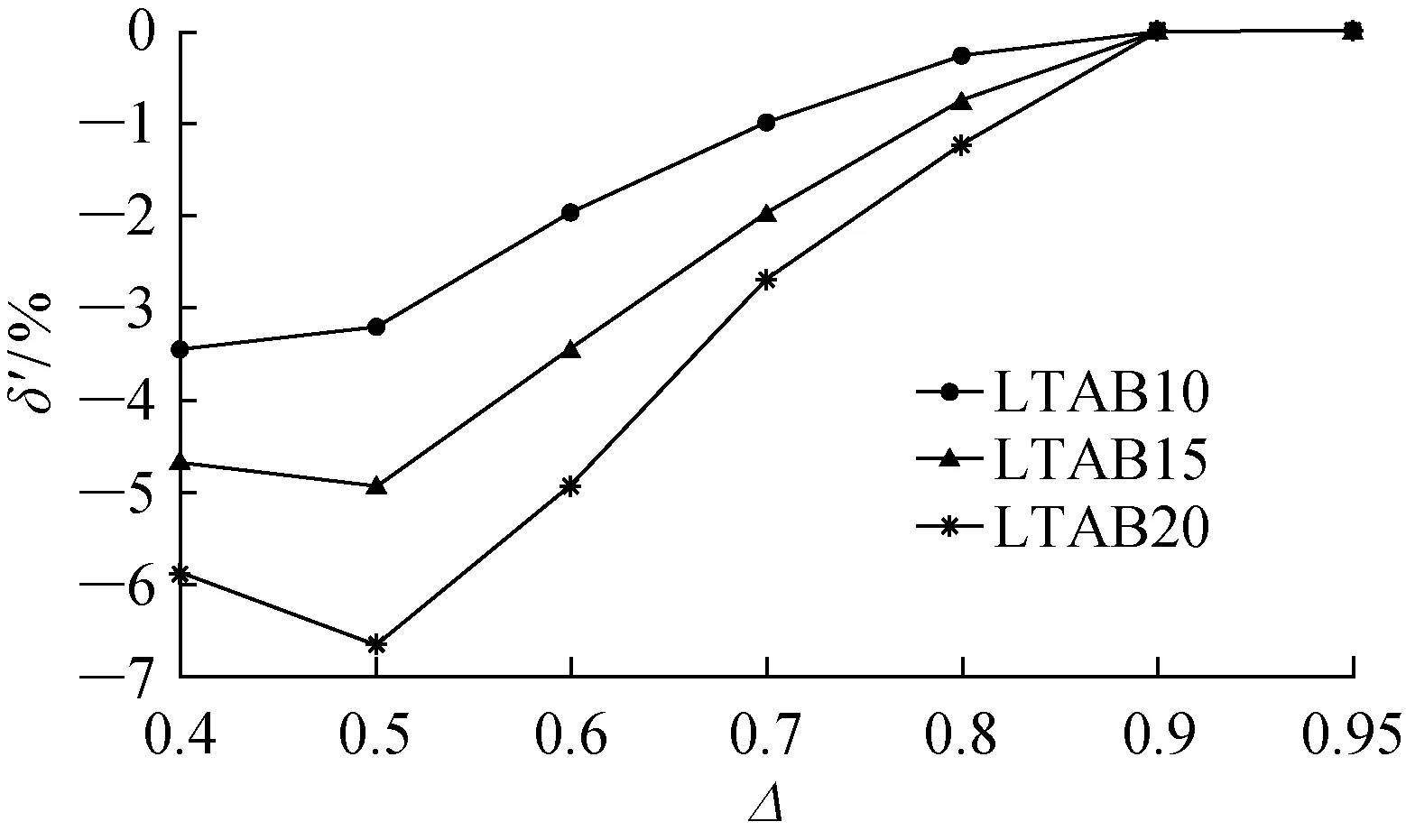
圖10 與普通載貨汽車相比,液罐汽車轉彎半徑的下降幅度
3.4 液體晃動無量綱阻尼系數對車輛操縱響應的影響
罐體裝載的液體種類發生變化時,液體側向晃動的無量綱阻尼系數發生變化,其受液體種類、充液比、罐體形狀以及外界激勵強度的影響.Fluent仿真表明,水、機油和甘油(運動黏度分別為0.001,0.2,0.799 kg/(m·s))在論文所研究的罐體形狀、充液比以及外界激勵強度下,無量綱阻尼系數的變化范圍約為0~0.1,0~0.2和0~0.6.為此,考察罐體充液比為0.5、液體晃動的無量綱阻尼系數分別為0和0.5時,液體晃動以及罐車動力學響應,結果如圖11所示,圖中FLLS為液體側向沖擊力,MLLS為液體側向沖擊力矩.
液體晃動的無量綱阻尼系數由0增加到0.5時,3種罐體內的液體晃動穩態時間顯著降低,下降幅度分別為32.8%,38.5%和43.4%;液體沖擊力及力矩的超調量下降幅度約為8.7%,10.1%和16.2%,而其穩態值的下降幅度均小于1%.
液體晃動特征的變化引起罐車動力學響應的改變.無量綱阻尼系數由0增加至0.5時,LTAB10,LTAB15及LTAB20罐車側傾角穩態值的下降幅度為5%,5.5%,2.9%,超調量的下降幅度為1.2%,38.4%,78.8%.可知,液體晃動無量綱阻尼系數的增加降低了罐車動力學響應的超調量,且罐體的長短軸之比越大,超調量的下降幅度越大.
4 結論
本文構建了能準確反映液體晃動與車輛運動耦合作用的液罐汽車動力學模型,建模過程中考慮了液體晃動的阻尼特性.在此基礎上,研究了液罐車的動力學響應特性.
(1)液體側向晃動顯著降低了液罐汽車的側傾穩定性,而對其側向穩定性的影響較小.與普通載貨汽車相比,液罐汽車的臨界穩定車速顯著下降.充液比小于0.7時,液罐車臨界穩定車速的下降幅度大于30%;當充液比為0.5時,下降幅度高達35%~50%.與普通載貨汽車相比,液罐汽車有輕微的過多轉向特性;且罐體長短軸之比越大,過多轉向越顯著.
(2)參與沖擊的液體質量占整車總質量的比值是影響液罐車行駛穩定性的關鍵因素,該比值受到罐體形狀和充液比的影響.絕大多數情況下,罐體充液比大于0.8時,推薦液罐車裝配長短軸之比較大的橢圓柱罐體;罐體充液比在較大范圍內變化時,推薦罐車裝配圓柱罐體.為保障行駛安全,液罐車應盡量避免充液比為0.4~0.7的狀態.
(3)罐車裝載不同種類的貨物時,液體晃動的無量綱阻尼系數越大,車輛動態響應的超調量越小,所需的穩態時間越短;且罐體的長短軸之比越大,該作用越顯著.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19