AI機器人在地鐵運營服務中的應用
2020-04-01 06:10:39劉寧牛特
計算機與網絡 2020年24期
劉寧 牛特
摘要:針對在地鐵運營服務中面臨的運營安全管理不規范、信息咨詢服務待優化、信息推送形式單一等諸多問題,通過分析地鐵運營實際需求,在AI機器人服務方案基礎上,結合機器視覺、語音交互、人臉識別、3D SLAM及避障等關鍵技術,設計了AI機器人在地鐵運營服務中的功能,實現了運營安全管理、信息咨詢優化和廣告宣傳等應用,對智慧軌道交通進行了新的探索。
關鍵詞:AI機器人;地鐵運營;機器視覺;語音交互;人臉識別;避障技術
中圖分類號:TP393文獻標志碼:A文章編號:1008-1739(2020)24-54-4
0引言
近年來,隨著我國人工智能和機器人技術的不斷發展,AI機器人開始滲透到國民經濟各行業當中。這些機器人的使用不僅可以降低人力成本,而且能夠提升工作精準度和專業度,從而提高生產效率。在某些行業,AI機器人已經取代人力,成為行業勞動生產力的主力軍。隨著機器人的大量使用,我國已經成為全球最大的AI機器人市場。
在地鐵行業,智慧地鐵和智能運營等概念逐步提出并快速發展。利用傳感檢測、機器視覺、大數據分析、人工智能等技術打造的智能服務機器人,已逐步開始應用且不斷發展,機器人助力地鐵運營已成為常態。
隨著我國城市化進程不斷加快,城市軌道交通也在飛速發展。截止2018年底,中國大陸地區共有35個城市開通城市軌道交通運營線路185條,運營線路總長度5 761.4 km,全年累計完成客運量210.7億人次[1]。作為城市經濟發達程度的重要標志,地鐵建設對于城市均衡發展和居民出行便利意義重大,但是受線路長、站點多、客流大等因素的影響,還普遍存在運營安全管理不規范、信息咨詢服務待優化、信息推送形式單一等問題,這些問題的存在給傳統的地鐵運營服務提出了更高要求。
1 AI機器人服務方案
1.1總體架構
基于技術的不斷進步,提出了智慧軌道交通的新概念。在此概念之下,利用圖像處理、機器視覺、語音交互技術、人臉識別、物體識別、3D SLAM技術、避障技術及大數據智能分析等技術打造的智能機器人,取得了良好的應用和發展,機器人助力地鐵運營已成為常態。目前的地鐵機器人系統架構采用分層設計,整體分為基礎層、支撐層、應用層和展現層4層,以及安全保障和標準規范兩大體系,如圖1所示。

①基礎層構建AI機器人的多維感知體系,包含感知類和設施類。感知類可以分為視頻傳感、GPS定位、紅外傳感、超聲波傳感、圖像傳感、機械臂、激光傳感、藍牙;設施類可以分為云平臺、通信網絡及應用服務器等。
②支撐層為智能AI機器人提供支撐服務,包括圖像處理、人臉識別、3D SLAM、大數據分析、語音識別、物體識別、避障技術及GPS導航等。
③應用層提供各種應用,分為運營安全、信息咨詢、廣告宣傳和其他內容4大類。
④展現層包含全身半身動作、液晶顯示器、人臉識別、手機App、物品識別和藍牙識別。
2 AI機器人關鍵技術
2.1機器視覺技術
機器視覺是一項綜合技術,包括圖像處理、機械工程技術、控制、電光源照明、光學成像、傳感器、模擬與數字視頻技術、計算機軟硬件技術等。機器視覺能夠將測量目標或研究對象轉換成規定格式的數字圖像信息,圖像處理系統選擇預先設置的圖像處理算法,根據圖像承載的像素、亮度、顏色等物理信息進行各種運算來獲取目標物體的特征信息。機器視覺圖像處理技術基于FPGA的底層圖像信號處理器(Image Signal Processor,ISP)算法[2]。
2.2語音交互技術
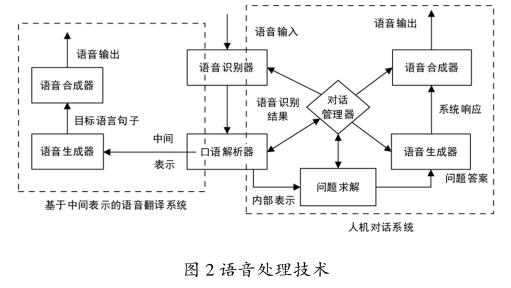
語音交互功能是機器人的基本智能交互功能之一,主要包括6個技術模塊[3],如圖2所示。
①語音識別模塊:實現用戶輸入語音到文字的識別轉換。
②語言解析模塊:對語音識別結果進行分析理解,獲得給定輸入的內部表示。
③問題求解模塊:依據語言解析器的分析結果進行問題的推理或查詢,求解用戶問題的答案。
④對話管理模塊:基于對話歷史調度人機交互機制,輔助語言解析器對語音識別結果進行正確的理解,為問題求解提供幫助,并指導語言的生成過程。
⑤語言生成模塊:根據解析模塊得到的內部表示,在對話管理機制的作用下生成自然語言句子。
⑥語音合成模塊:將生成模塊生成的句子轉換成語音輸出。
2.3人臉識別和物體識別技術
人臉識別是基于人的臉部特征信息進行身份識別的一種生物識別技術。物體識別是對三維世界的客體及環境的感知和認識,屬于高級的計算機視覺范疇。
①實例學習:將人臉檢測視為區分非人臉樣本與人臉樣本的2類模式,通過對人臉樣本集合非人臉樣本集進行學習以產生分類器。
②子空間方法:在人臉識別中利用的是主元子空間,而人臉檢測利用的是次元子空間,用待檢測區域在次元子空間上的投影能量,即待檢測區域到特征臉子空間的距離作為檢測統計量。
③空間匹配濾波器方法:包括各種模板匹配方法、合成辨別函數方法等,以數字圖像處理與識別為基礎的結合人工智能、系統學等學科的研究方向[4]。
2.4 3D SLAM技術
同時定位與建圖(Simultaneous Localization and Mapping,SLAM)是指機器人在自身位置不確定的條件下,在完全未知環境中創建地圖,同時利用地圖進行自主定位和導航[5]。機器人在位置環境中從一個未知位置開始移動,在移動過程中根據位置估計和傳感器數據進行自身定位,同時建造增量式地圖。
基于霍夫曼方法的SLAM的基本過程是:①使用擴展卡爾曼濾波(Extend Kalman Filter,EKF)進行定位;②獲取所有路標和機器人的位置信息作為先決條件;③使用矢量方程存儲路標和機器人的位置;④通過循環迭代減少每次的誤差量。
2.5避障技術
避障是指機器人在行走過程中,通過傳感器感知在其規劃路線上存在靜態或動態障礙物時,按照一定的算法實時更新路徑,繞過障礙物,最后達到目標點。機器人避障技術的基礎是移動機器人自身狀態的確定和周圍環境信息的獲取,這些信息都是通過安裝在機器人上的傳感器獲取的。通過傳感器進行前端信息的獲取并提取特征,最終進行決策融合達到聯合識別的結果[6],如圖4所示。

3 AI機器人的應用
結合地鐵運營管理業務實際,并且利用上述關鍵技術,系統主要實現了以下幾個方面的實際應用。
3.1運營安全管理
運營安全管理主要有以下方面的應用:
①安檢核查:機器人采用人臉識別和物體識別技術,進行安檢核查。
②特殊通道檢票:機器人在特殊通道進行出入登記和檢票。
③夜間巡邏:在夜間地鐵站關閉后,由機器人對地鐵站進行無死角巡邏,一旦發現可疑蹤跡和安全隱患,可以立即上報。
④應急指揮疏散:在出現緊急事故時,機器人可協助現場工作人員對乘客進行緊急疏散。
⑤救援探測:在出現危險事故時,可利用機器人進入危險區域進行救援探測,節省救援時間,降低人員傷亡幾率。
⑥上車安全確認:機器人確認安全門是否正常關閉,并且自行上報。
3.2信息咨詢優化
信息咨詢優化主要有以下方面的應用:
①語音對話:機器人具有智能語音對話功能,可提供地鐵運營、換乘相關地鐵班次等相關咨詢。
②導航引路:機器人可學習規定區域內的地圖信息、位置信息等,為乘客提供精確的導航引路功能,并滿足智能避障功能。
③聯系客服:機器人具有語音通信功能,并與車站無線和車站電話互聯互通,乘客可以通過機器人呼叫地鐵客服咨詢問題,投訴、上報可疑事件等。
3.3廣告宣傳
廣告宣傳主要有以下方面的應用:
①分流引導:機器人可在地鐵入口處進行限流,待接到放行指令后再繼續放行乘客進站乘車,同時可引導密集通道處的乘客到人數相對較少的通道內排隊等候。
②廣告運營:機器人可通過播放預定義的視頻或通過客戶端推送視頻播放廣告。
③系統對接:機器人顯示屏可以根據地鐵運營需要,與乘客信息系統對接,并通過機器人上的攝像頭及傳感器來統計各種廣告對乘客的吸引程度。
3.4其他內容優化
其他方面的應用有2個:
①遠程控制:地鐵運營人員可以通過手機App遠程控制機器人,對站內運營情況、人員工作狀態、突發情況進行巡視,便于遠程了解各站的運營情況。
②行李托運:機器人可為乘客提供負重托運服務,采用模塊化設計,能夠進行多種方式組合的托運。
4結束語
目前機器人技術發展日新月異,機器人從單體作業向可自主學習、自律行動的方向發展。除了傳感器技術、軟件信息處理能力的提升進步之外,深度學習等AI技術(圖像與語音識別、機器、學習)的跨越式發展,也推動了機器人自身能力的進一步提升,使機器人能夠從事更加高級的工作。機器人從過去的簡單重復性勞動,變得能夠互聯、共享,甚至協同工作。
基于AI機器人的地鐵運營應用是一項復雜的工程。地鐵機器人在地鐵中的應用越來越受關注,隨著機器人技術的發展,其自身的功能和性能將會進一步提高,可以開發出更多的地鐵應用模式,在這個過程中可能會遇到一些新的問題,期望越來越多的人共同來探索和解決。
參考文獻
[1]佚名.城市軌道交通2018年度統計和分析報告[J].城市軌道交通,2019(4):16-34.
[2]龔愛平.基于嵌入式機器視覺的信息采集與處理技術研究[D].杭州:浙江大學,2013.
[3]李振宇.面向教育機器人的語音交互系統的設計與實現[D].武漢:華中師范大學,2018.
[4]沈學舉,王永仲,姚廣濤.Vander Lugt相關器中幾種空間匹配濾波器算法比較[J].光學技術,2008(2):314-316.
[5]耿長良.3D SLAM技術在軌道交通竣工測量中的應用[J].北京測繪,2020,34(10):1463-1467.
[6]呂漫麗.基于多傳感器信息融合的移動機器人避障研究[D].吉林:東北電力大學,2008.
猜你喜歡
作文中學版(2022年1期)2022-04-14 08:00:34
學生天地(2020年31期)2020-06-01 02:32:06
中華手工(2017年2期)2017-06-06 23:00:31
計算機工程(2015年8期)2015-07-03 12:19:07
中外會展(2014年4期)2014-11-27 07:46:46
電子設計工程(2014年8期)2014-02-27 11:57:26
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
