基于雷達測距的鐵路工程車防撞系統
2020-04-01 19:52:23康燕仁
計算機與網絡 2020年24期
康燕仁
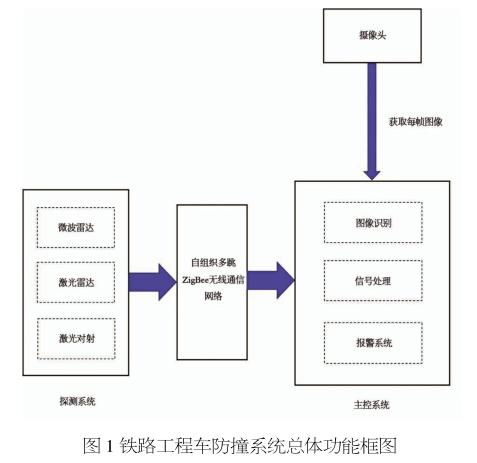
本文設計并研發了一種基于雷達測距的鐵路工程車防撞系統,該系統主要由微波測距雷達、激光測距雷達、激光對射模塊、攝像頭和主控組成,微波雷達、激光雷達和激光對射將周圍獲取的信息傳給單片機,再通過ZigBee無線通信網絡傳輸給主控,主控將接收的數據進行信息融合并與設定的門限值做比較,從而形成報警。同時主控根據前方路況畫面進行預測,通過攝像頭獲取實時圖像,導入深度學習模型進行目標識別。
近年來,隨著軌道交通建設規劃的實施,軌道交通、客運專線建設正在高速發展,已成為城市居民便捷出行的主要交通工具。為了實現更快的人員來往、物資運輸,列車運行速度在不斷提高,同時為了保障列車運行的安全,對軌道車輛及運營設備的要求也越來越高。如何保障列車安全運營成為軌道交通最為重要和最受關注的話題。
鐵路檢修工程車作為鐵路安全防護與檢修中的重要一環,扮演著至關重要的角色,其主要應用于牽引檢修、運輸檢修、軌道檢修和軌道維護等方面。考慮到運營的特殊性和經濟性,鐵路工程車并沒有安裝列車運行自動防護系統(ATP)或其他列控系統,其安全防護主要依靠人眼識別判斷,因此在防護力度、安全性、操作性及反應靈敏度等方面存在一定的缺陷,例如:
①鐵路工程車運行在還未完成的鐵路上,或多個不同作業的工程車同時工作時,由于沒有任何檢測裝置和報警系統,工程車司機一旦疏忽,很可能導致相撞。
②當前方出現其他物體時,需要迅速判斷該減速、停止還是繼續工作。司機受施工作業壓力、任務繁重等因素影響,可能會出現處理速度慢,甚至錯誤處理等危險行為。
因此需要研究制造一套與信號系統完全獨立且能全天時、全天候自主工作的工程車行車安全保障系統。
系統功能
1.探測功能
主要對微波測距雷達、激光測距雷達、激光對射模塊,進行數據采集,數據通過單片機發送到ZigBee再經過ZigBee無線通信系統傳輸到主控系統。其中微波雷達對工程車的左、上、右3個方向進行檢測,探測距離≥8 m,屬于進程防護;激光雷達對工程車的前方和后方進行檢測,探測距離≥800 m,屬于遠程防護;激光對射模塊,檢測工程車自身的高度和寬度,以免造成剮蹭或意外事故。
2.分類識別功能
工程車的前方路況畫面通過攝像頭進行實時捕獲,同時傳給主控,主控通過深度學習模型進行識別、預測和分類。
3.信息融合功能
主控對獲取的多組雷達數據和分類的結果進行處理,并與設置的門限值做比較,根據系統設置的報警條件進行語音報警。同時設置傳感器自檢功能,系統每隔5 s發一個信號脈沖,一旦在超過10 s仍接不到脈沖時系統立即報警,大大提高了系統的可靠性。鐵路工程車防撞系統總體功如圖1所示。
系統硬件模塊
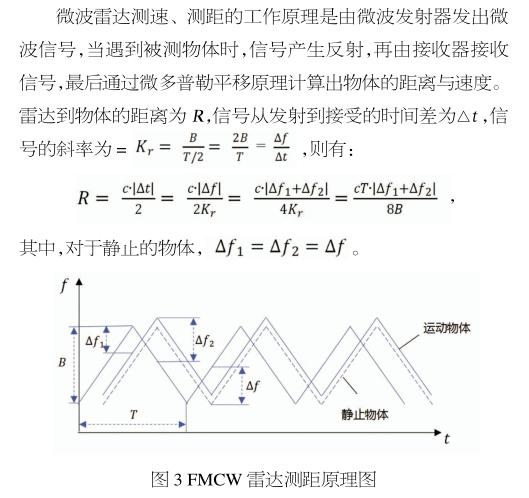
1.微波雷達測距
本系統微波雷達采用的是基于調頻連續波(FMCW)的測距雷達,FMCW雷達與脈沖雷達相比具有較大的帶寬,因此具有較高的距離分辨力。微波雷達測距模塊如圖2所示。且具有超大的時帶積,遠大于相同信號帶寬和電平的脈沖雷達,所以在相同檢測能力條件下,FMCW雷達發射功率低,不易被截獲。
相比于激光雷達,微波雷達的抗干擾能力更強,可以在雨雪、霧霾及沙塵暴等惡劣天氣下正常工作,在糟糕環境下微波雷達的穿透性更勝一籌。
2.激光雷達測距
相比于微波雷達,激光雷達具有探測范圍較廣(本系統激光雷達最高可測得1 000 m)、探測精度高和穩定性強等優點。其工作原理與微波雷達基本類似,只是激光雷達發射的電磁波是一條直線,主要以光粒子發射為主要方法。
3.激光對射探測
激光對射屬于主動式入侵探測器,由激光發射機和激光接收機兩部分構成。

在激光發射機和激光接收機之間形成調制后的一條或者多條激光光束,當激光接收機可靠接收到激光發射機發出的調制信號時,激光接收機判定激光入侵探測器工作正常,就會維持當前的輸出信號不變。當激光接收機接收不到激光發射機的調制信號時(激光發射機和激光接收機之間有物體阻斷激光射線或者激光發射機出現故障),激光接收機就會判定激光入侵探測器工作不正常,激光接收機就會輸出變化的報警信號給后端相連接的報警控制器或者相關聯動設備,產生相應的報警信息。
4. ZigBee無線通信
有線通信的布線繁瑣復雜,因此本系統采用無線通信網絡代替有線通信進行信息傳輸,無線傳輸技術主要有WiFi、NFC、ZigBee以及藍牙等。采用ZigBee是因其具有近距離、低復雜度、低功耗、低數據率及低成本等特點。
系統軟件功能模塊
1.數據信息采集
微波雷達、激光雷達和激光對射3個模塊將獲取的信息傳遞給單片機,單片機通過ZigBee無線通信網絡傳輸給主控。
2.圖像分類識別
本系統需要對前面路況進行實時識別,判斷前方是直行還是轉彎,判斷前方是否出現人、畜和其他工程車。采用的圖像識別模型是基于Keras的CNN深度學習的AlexNet模型。先在測試集上進行訓練,并將各層權重進行保存。之后通過Python調用攝像頭,并每隔數幀讀取圖片,并通過上述模型進行預測,預測結果保存在文檔,實時更新,供QT Creator調用。
3.主控數據處理
主控通過ZigBee的協調器節點獲取各個終端節點的數據信息,與自己設定的門限值比較,根據報警條件產生相應的報警,并將報警信息顯示在屏幕上,同時將前方路況預測的信息顯示在屏幕上。此外,還設置信號通道自檢功能,在一段時間內檢測不到相應ZigBee的數據就會產生報警,由于該危險系數較高,因此將直接中斷總串口的讀取。
結果數據分析
模型數據顯示,微波雷達讀取速率≥10 Hz,測距精度≤0.1 m,探測距離≥10 m,且數據正確率達到98 %以上。激光雷達讀取速率≥2 Hz,測距精度≤1 m,探測距離≥800 m,數據正確率達90 %以上。激光對射模塊至少可在10 m距離實現感應,數據正確率達到99%以上。前方路況識別率全部80%以上。

本項目通過對所研究系統的關鍵技術,進行了討論、驗證和測試,搭建了樣機模型。隨著現代化交通設施的發展,鐵路工程車作為保障鐵路安全性能最重要的一環,對其行駛時的安全防護與周圍環境的檢測不容忽視。基于此,本項目基于雷達測距的鐵路工程車防撞系統將具有極大的參考和應用價值。
猜你喜歡
天天愛科學·科學啟蒙(2025年3期)2025-03-27 00:00:00
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
云南畫報(2021年12期)2021-03-08 00:50:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年7期)2018-08-29 01:17:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年4期)2016-04-04 02:58:04
