基于模糊PID的恒張力控制助力鋪排船航跡跟蹤
2020-04-01 03:46:08夏聲宏鐘世位李宗華王智誠
交通科技 2020年1期
關鍵詞:作業
夏聲宏 鐘世位 李宗華 王智誠
(長江重慶航道工程局 重慶 400011)
在內河航道治理工程中,航道水下導堤、丁壩、潛堤等的主體結構堤身下均用軟體排進行護堤。軟體排鋪設船(以下簡稱鋪排船)是航道治理工程中鋪設土工布軟體排的專用設備,其作業目標是將結構形式不同、平面尺寸極大(一般為22 m長、40 m寬)的柔性排體在水下按照計劃的軌跡鋪展,確保護底作業的施工質量。因為鋪排船的施工作業是在拋出5~8個錨后,通過對各錨轎車的收放錨纜實現移船的同時將排體沿著計劃的坐標和工作線下放至水底。顯見鋪排船作業系統的控制對象不僅分散,而且要求協調同步,控制難度大。而水下敷設排布的施工作業精度要求高,兩塊排體搭接必須保證在0.5 m。因此鋪排船的自動控制系統研究都是從控制錨絞車入手來提高移船方向和速度,從順水、逆水、垂直水流等作業情況結合風、浪的環境影響來考慮控制策略,以實現鋪排船在不同工況下的高精度鋪排。
本文基于長時間對鋪排船施工作業質量的評估分析,考慮懸在水中的錨纜張力對鋪排船控制效果的影響,提出系統中增加控制錨纜張力的思想。并擬通過應用于實際工程驗證其正確性。并用實際工程進行驗證。
1 問題的提出及設計思路
鋪排船屬于非自航的錨泊移位型工程船舶,其定位、移船操作主要依靠拖船和拋錨艇協助。作業前鋪排船必須由專門配備的1~2艘拖船將其拖至作業地點,然后按照鋪排作業計劃先進行拋錨定位。作業時則根據工程計劃,操縱錨泊設備來實現船舶的移位和精確定位,同時完成軟體排的下放和鋪設。鋪排船作業的側視圖見圖1,卷在卷筒上的軟體排在工作平臺上完成制作后,軟體排通過協調控制多個錨機的收、放錨鏈速度及卷筒的放排速度,軟體排通過主、副滑板憑借其自身重力下滑到水底,一邊放排一邊操縱錨泊設備移船,實現軟體排在水底的鋪設。軟體排根據施工航道的情況,可制作系袋軟體排、沙肋軟體排、硅軟體排、混凝土聯鎖塊軟體排。
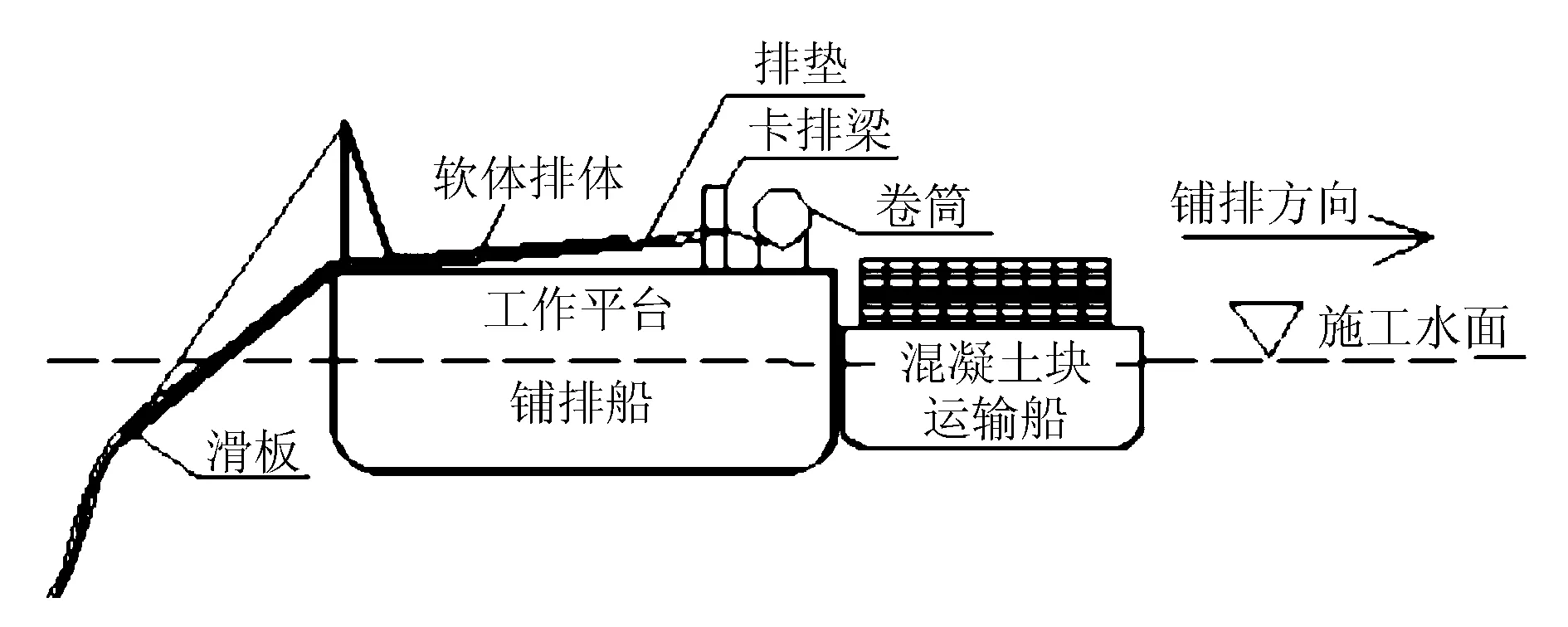
圖1 鋪排船側視圖
鋪排船在作業時,受到的力既有縱向和橫向力,還有一定的轉舷力矩,因此,鋪排船一般采用多點系泊,多條錨泊線向四周發散分布,六錨和八錨的錨泊系統布置形式見圖2。
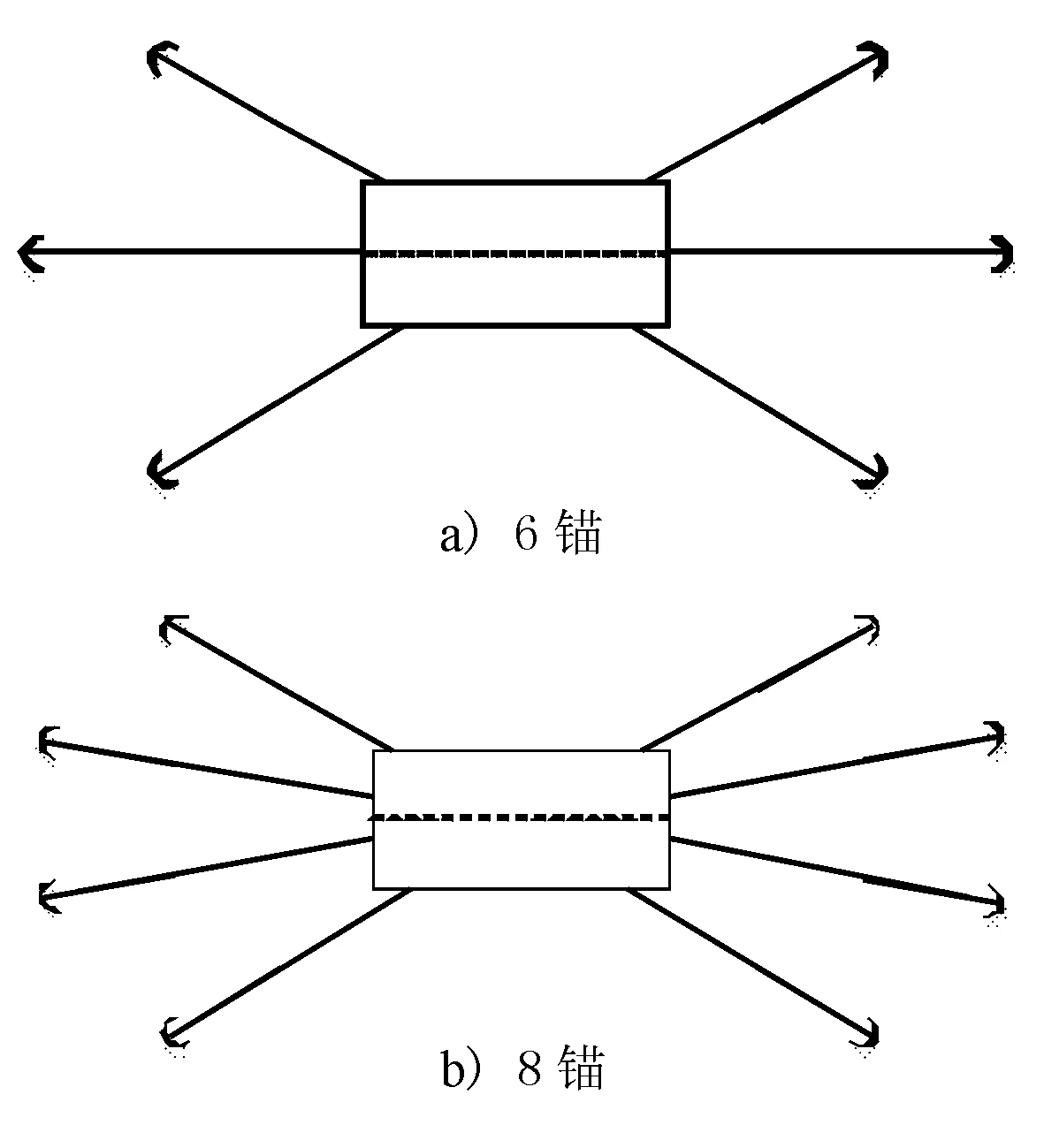
圖2 鋪排船錨泊線的布置形式
錨泊設備主要由錨絞車、錨鏈和錨三部分組成,其中錨嚙入水下的泥土中為船舶提供著力點,錨鏈傳遞拉力固定船舶,錨絞車通過控制收放纜來實現船舶的定位和移動。施工作業時,需要結合當時水域環境的風、浪、潛流等水文情況協調控制多臺錨絞車的收放錨鏈,實現船舶移動時能以要求的精度跟蹤計劃的軌跡線,完成水下高質量鋪排功能。因此目前開展鋪排船控制研究的重點在:鋪排船的分布式控制系統[1-3]、錨泊移位型船舶的建模,以及采用神經網絡、模糊邏輯、粒子群等智能方法實現鋪排船的平行移船和動態定位[4-5]。這些成果在重慶航道工程局的22 m排寬的“俞工排1號”、40 m排寬的長雁系列鋪排船上得到成功應用,為我國鋪排船的理論研究和實際應用奠定了堅實的基礎。
隨著航道疏浚行業的快速發展,鋪排船大型化、作業深水化,而且順水、逆水、垂直水流等的多樣化等鋪排工藝要求不斷提高,鋪排船的自動控制難度也隨之提高。本文依托40 m排寬的“長雁2號“和”長雁22號“鋪排船控制系統升級改造項目,針對鋪排船網絡系統、自動控制系統的控制策略優化后,仍然存在鋪排船在風、浪、流的復雜環境下自動鋪排作業航跡偏差較大、動態響應變差的問題開展深入研究,從絞車的恒張力控制入手,設計了一種基于模糊PID的恒張力控制方式,使得錨鏈在自動鋪排時能始終保持在張力恒定的張緊狀態,提高了鋪排控制效果,從而降低了鋪排船自動鋪排工況下的航跡偏差,提高了航跡跟蹤精度。
2 液壓型錨絞車錨鏈張力計算
“長雁”系列鋪排船配置有8組液壓型錨泊設備,鋪排前一般根據需求和規劃設計拋出5~8個錨。液壓錨泊設備是通過驅動絞車組收放錨纜來實現移船,絞車組由1臺摩擦絞車和1臺容纜絞車構成。容纜絞車位于甲板下方的機艙,主要作用是存儲纜鏈,不需要提供移船時的張力,在錨絞車收纜時同步收纜,放纜時只需放開剎車隨錨鏈轉動,不需要調速。摩擦絞車一般布置在船艏艉甲板上,摩擦絞車是為鋪排船舶定位和移船提供動力的,功率較大,所以設置了2個驅動輪,從容纜絞車出來的錨鏈繞摩擦絞車1周后與錨連接,摩擦絞車通過和錨鏈的靜摩擦為錨鏈提供張力,摩擦絞車在工作時摩擦力的作用半徑為固定值。由于移船的速度需要可調,故需要3組開關量控制電磁閥實現正反轉和剎車,1組模擬量來控制液壓馬達比例閥開度實現調速。
為實現液壓絞車恒張力控制,以錨鏈的張力檢測值作為反饋實現張力的閉環控制。目前成熟的張力測量方法有直接測量和間接測算2種。直接測量是在錨纜上串接拉力傳感器或彈簧測力計直接獲取張力,但這種方法只適用于靜態張力獲取,不適合鋪排船需要長距離收放纜實際工況。所以本文通過液壓絞車進出機的壓力差Δp來間接測算錨纜張力。
根據能量守恒定律有
ML2πn=ΔpQs=Δpqn
(1)
式中:ML為液壓絞車的理論轉矩;n為液壓絞車轉速;Δp為工作壓差;q為液壓絞車排量;Qs為液壓絞車的實際流量。
由式(1)可以推出液壓絞車的理論轉矩為
(2)
但由于流體與液壓絞車零件之間相對運動的摩擦,液壓絞車零件之間的摩擦均會產生能量損耗。這些損耗的外在表現為液壓馬達的機械損失,使得實際輸出轉矩低于理論轉矩,即
MS=ML-ΔM
(3)
式中:ΔM為由于摩擦造成的轉矩損失。
在液壓系統中用機械效率描述這一損失的比重,機械效率定義為實際輸出轉矩與理論輸出轉矩的比值,即
(4)
則
(6)
由式(5)可計算出液壓絞車的實際輸出轉矩。若液壓絞車的半徑為R,則錨纜張力F為
(6)
式中:Δp為液壓絞車工作壓差,可從液壓絞車進出機壓力傳感器的值獲到;q為液壓絞車排量;p為絞車的固有參數,可通過液壓馬達技術參數查到;R為液壓絞車半徑,需在現場測量得到,是一個定值;ηm為液壓馬達的機械效率,每臺絞車的機械效率各有不同,因此,需要在鋪排船出廠前對絞車逐臺整定其機械效率,以保證纜繩張力計算的準確性。
3 模糊PID張力控制器設計
3.1 模糊PID控制原理
傳統PID控制雖然算法簡單易于實現且調整時間較快、精度較高,但是其參數的整定取決于控制對象的數學模型,而且抗干擾能力不強。而鋪排船的大慣性和不確定的水文環境特點,難以建立鋪排船的數學模型。而模糊PID不需要精確的數學模型,能較好地處理時變、非線性、滯后等問題,而且有很好的魯棒性和快速的響應速度,因此,本文采用模糊PID控制實現錨纜恒張力控制,模糊PID控制錨纜張力的系統結構圖見圖3,將計算出的錨纜張力和給定張力的偏差值e和錨纜張力偏差值變化率de/dt作為模糊控制器的2個輸入,對2個輸入進行模糊化后,通過模糊推理之后得到清晰化的輸出來調整PID的Kp、Ki、Kd3個參數。解決傳統PID控制器不能對象變化和環境變化自適應改變PID參數的缺點。
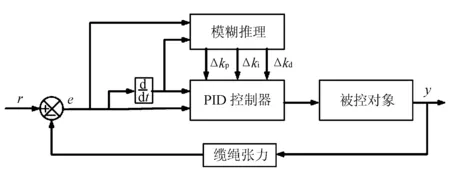
圖3 模糊PID控制器結構
3.2 控制變量模糊子集設計
本文選取錨纜張力偏差E的基本論域[-20,20],模糊域為E={-2,-1,0,1,2},則與其相應的各語言值為{NM,NS,ZO,PS,PM},其意義分別為繩子狀態“極松”“松”“松緊適當”“緊”“極緊”。取錨纜張力的變化率Ec的基本論域為[-1,1], 模糊域為Ec={-2,-1,0,1,2},則與其相應的各語言值為{NM,NS,ZO,PS,PM},其意義分別為纜繩張力“快速減小”“緩慢減小”“不變”“緩慢增大”“快速增大”。并取Kp,Ki,Kd3個參數的模糊論域均為{-2,-1,0,1,2},則與其相應對應的各語言值均為{NM,NS,ZO,PS,PM}。
3.3 模糊控制規則
模糊規則是模糊邏輯控制的關鍵,根據鋪排船絞車操作人員積累的實際操作經驗和每臺絞車的實際使用情況,需要分別總結并設計出各絞車的模糊控制規則,以達到良好的控制效果[6]。下文以艏主錨絞車為例,介紹模糊設計的控制規則,見表1。
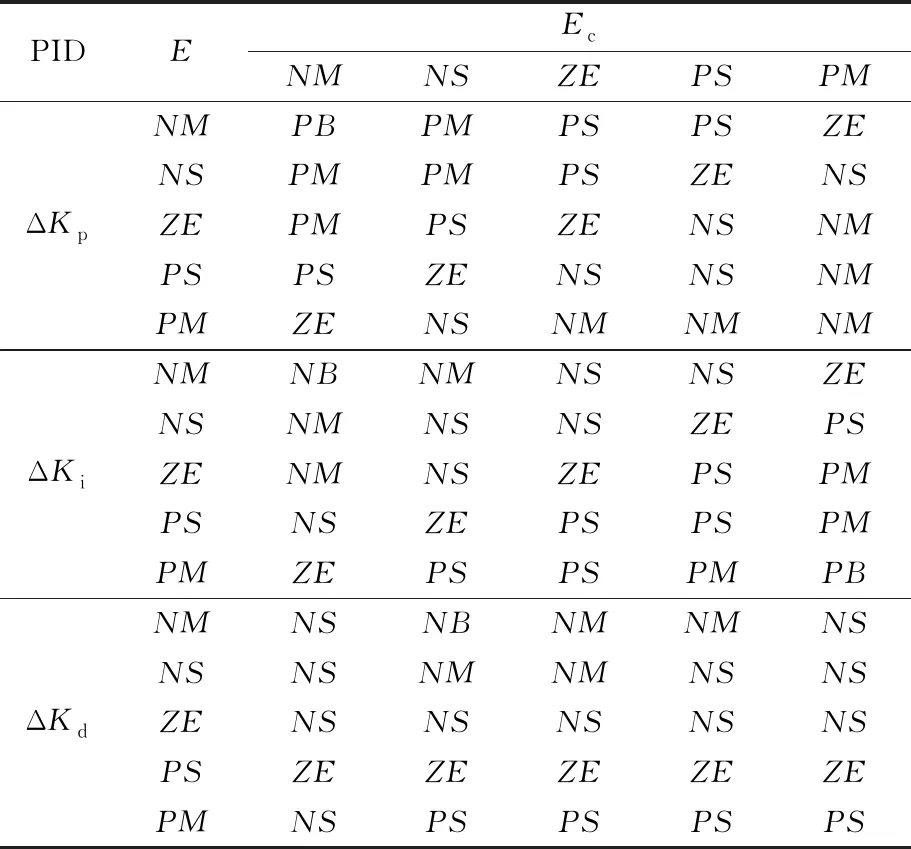
表1 模糊控制規則表
3.4 輸出清晰化
由模糊推理得出的結果是一個模糊集合,在實際應用場合時,須用一精確值來控制被控對象。本文用重心法去模糊化,然后結合工程實際工作情況微調其參數,最后得到模糊查詢表,見表2。
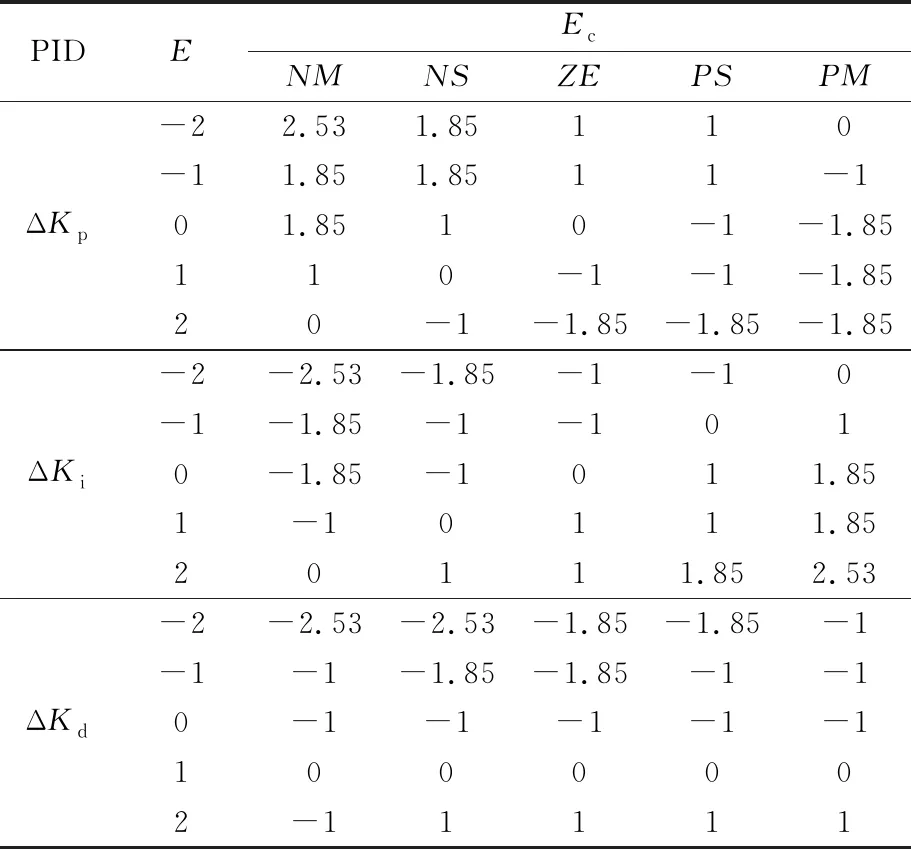
表2 模糊查詢表
4 實際應用效果
為驗證本文設計的恒張力控制策略的控制效果,將模糊PID恒張力算法應用于“長雁2號”鋪排船的PLC邏輯控制程序中,通過鋪排船上位控制軟件獲得的鋪排船實際作業的航跡偏差驗證模糊PID控制策略的控制效果。
鋪排船上位監控系統的自動鋪排作業界面圖見圖4,該工程采用五錨定位方式,由于是護岸工程,有2個錨是固定于岸邊的,圖中矩形框為施工要求鋪排的工作線,按位置示意鋪設于江底。排布的一次工作線從下至上由1條實線和1條虛線構成,實線和虛線分別代表了排布的上下邊緣。為了能有效避免水土流失,每條排布間需要有一定的搭接度(本次作業的搭接度為5 m)。

圖4 上位機自動鋪排界面
4.1 PLC控制系統未啟用恒張力控制算法的鋪排軌跡
以長江蔡家渡區域1 d鋪排工作量(1條排布)的軌跡誤差的平均值對比系統啟用恒張力算法前后鋪排船工作的完成質量。
蔡家渡1號排鋪設后上位機保存的航跡圖(實線為計劃的排布邊緣線,虛線軌跡為實際鋪排的邊緣線)見圖5,為了方便計算對比航跡偏差,在CAD文件中加入柵格,一格代表大地坐標10 m。用面積法求得航跡偏差的平均值為1.89 m。

圖5 PLC未啟用恒張力模塊鋪排船自動鋪排航跡
4.2 PLC控制系統啟用恒張力算法后鋪排航跡
蔡家渡2號排鋪設完成后上位PC保存的航跡圖見圖6,用面積法求得航跡偏差的平均值為0.78 m,顯見,啟用恒張力算法后航跡平均誤差只有未采用恒張力算法后航跡平均誤差的41%,平均誤差減少了59%。
2次鋪排作業地理位置相同,環境相同,2塊相鄰排布鋪設時間間隔僅為1 d,水流速度變化也不大,由此可見,模糊PID控制的恒張力控制策略可以明顯提高自動鋪排程序的控制效果。
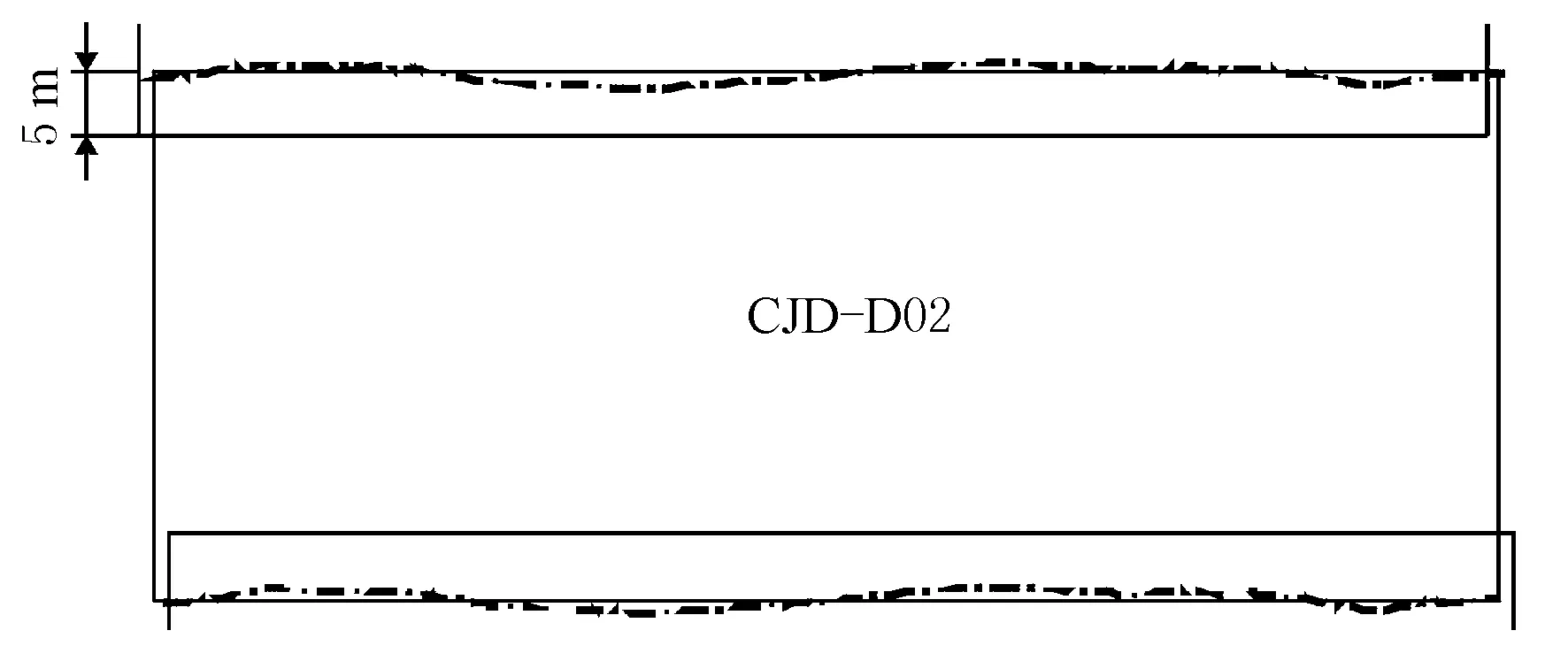
圖6 PLC啟用自動鋪排模塊鋪排船航跡
5 結語
鋪排船是為長江航道整治工程研制的一種工程類船舶,因其作業靠多錨協調牽引移船來實現軟體排準確鋪設在江底,故影響控制效果的因素很多,控制難度大。經過大量實踐,本研究提出在研究其驅動控制策略的同時關注錨纜張力,并將該算法加入到原系統控制中,實際應用結果證明了本文算法的有效性。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
