以競賽為導向的機器人技術課程教學改革研究
2020-03-30 10:21:18高文英
遼寧高職學報 2020年1期
高文英
(沈陽職業技術學院,遼寧 沈陽 110045)
機械的自動化是當今不可避免的一大趨勢。智能機器人代替人類工作能夠解決安全性、效率、可靠性等一系列問題,并能夠在小空間內代替人類無法觸及的領域去完成工作。振興東北老工業基地,要在做強裝備制造業的同時加快培育機器人等戰略性新興產業的發展,實現由“中國制造”轉變為“中國智造”。作為東北老工業基地的遼寧沈陽,正在大力發展智能制造、智能服務和智能生產,加快向智能化轉型[1-6]。
一、高職院校機器人技術課程教學存在的問題
機器人技術課程為高職機械設計與制造專業的專業必修課,課程主要講授機器人概述、分類、結構、技術參數、運動學基礎、機械結構、傳感器、控制技術、編程技術等[7-10]。本課程在教學過程中存在的主要問題如下。
(一)課程難度大,需要的前續知識儲備量大
高職機器人技術課程要求學生掌握機械原理、機械設計、控制工程、電子與電工技術、傳感器與測試技術及其它一些機與電的專業知識,而大部分高職學生缺乏扎實的機械和控制的理論基礎,或者說機械和控制二者得此失彼,是機器人技術課程遇到的最大障礙,學生難以對本門課進行整體的把控。
(二)課程教學過程與生產實踐相脫離
本課程為高職機械設計與制造專業第四學期的專業基礎課,共48學時,其中理論基礎40學時,實踐環節8學時。實踐環節多以參觀為主,理論教學枯燥,多是一些理論計算、分析,從而使學生從一開始就對本門課產生厭惡感。講授過程中主要以書本為主,并基本采用理論講述,效果欠佳。
(三)課程考核形式單一
課程多以筆試考核形式來結束課程學習。主要通過考查理論計算、概念等知識,學生只需通過期末復習即可通過考試,導致學生缺課率提高,而無法考查學生的實際動手及理解能力,與企業實際需求脫鉤。
二、課程改革目標
高職機器人技術課程主要基于當今應用型人才培養的需求,使學生在掌握機器人理論基礎的同時,通過組織競賽、任務分解、在課堂上對任務進行學習、實踐操作,從而真正地達到對課程的理解、掌握等目的。
三、以競賽為導向的課程改革建設實例
以遼寧省機器人競賽為原型,題目為“智能撿球機器人”,要求機器人能夠按照給定軌跡行進,能夠自主識別路邊的圓球,并通過車載拾球裝置將球拾起,行進至終點后能夠自主將收集的圓球倒入收球箱內。
(一)課程學時設置
為了滿足教學效果,達到課程改革要求,實現應用技能型人才培養,提高學生實踐能力,特將本門課程設置為總64學時,其中32為理論教學,32為實踐訓練。
1.理論教學課時安排
理論教學以競賽為導向開設學習內容,針對機器人制作過程中所需知識,來設計教學體系,以此提高教學效率。開設的教學內容、目標及學時如表1所示。
2.理論教學考核方式
考核方式是一門課程如何結束的重要部分,也是了解學生掌握程度的一項重要措施。根據教學改革目標,將本次課程考核方式確定為任務式分階段教學得分的方式,以此達到提高學生實踐能力、掌握主要知識點的目的。

表1 理論教學課時安排
將班級按照人數分為4組(每組8人),按照每2~3周一個項目進行任務分配,達到每人有項目,每人有分數。并進行PPT幻燈片匯報,共6次匯報,每次10~20分不等,滿分100分。以此使整個評分貫穿于整個教學過程,從而消除逃課、半路放棄或者期末突擊考試等情形,真正達到人人聽課、人人參與、人人實踐和人人達標的要求。
3.實踐環節考核
實踐環節的設計條件:實踐環節與理論教學一一對應,在完成理論教學的基礎上,展開機器人的制作訓練,訓練目的和題目與理論教學一致。
實踐環節的設計任務:a.設計一款能夠按給定軌跡行進的移動平臺;b.設計一款能夠安裝在移動平臺上的機械手臂;c.設計控制程序流程圖,編寫相關程序;d.制作實物,調試程序。
實踐環節的設計要求:a.完成小車的建模,打印整套圖紙做出實物;b.完成機械手的建模,打印整套圖紙,做出實物;c.完成整機裝配調試
4.實踐環節的評分設置
實踐環節的分值設置如表2所示。
(二)課改教學成果
1.創新點
一是根據機器人技術的課程特點,制定了由“32(理論)+32(實踐)”的學時分布特色,實現了理實一體化教學安排。
二是通過過程考核,控制了學生出勤率,實現了人人參與、步步得分的課堂環境,打破了常規的試卷模式。
三是確保了學生學習的主觀能動性,增加了實踐動手能力。
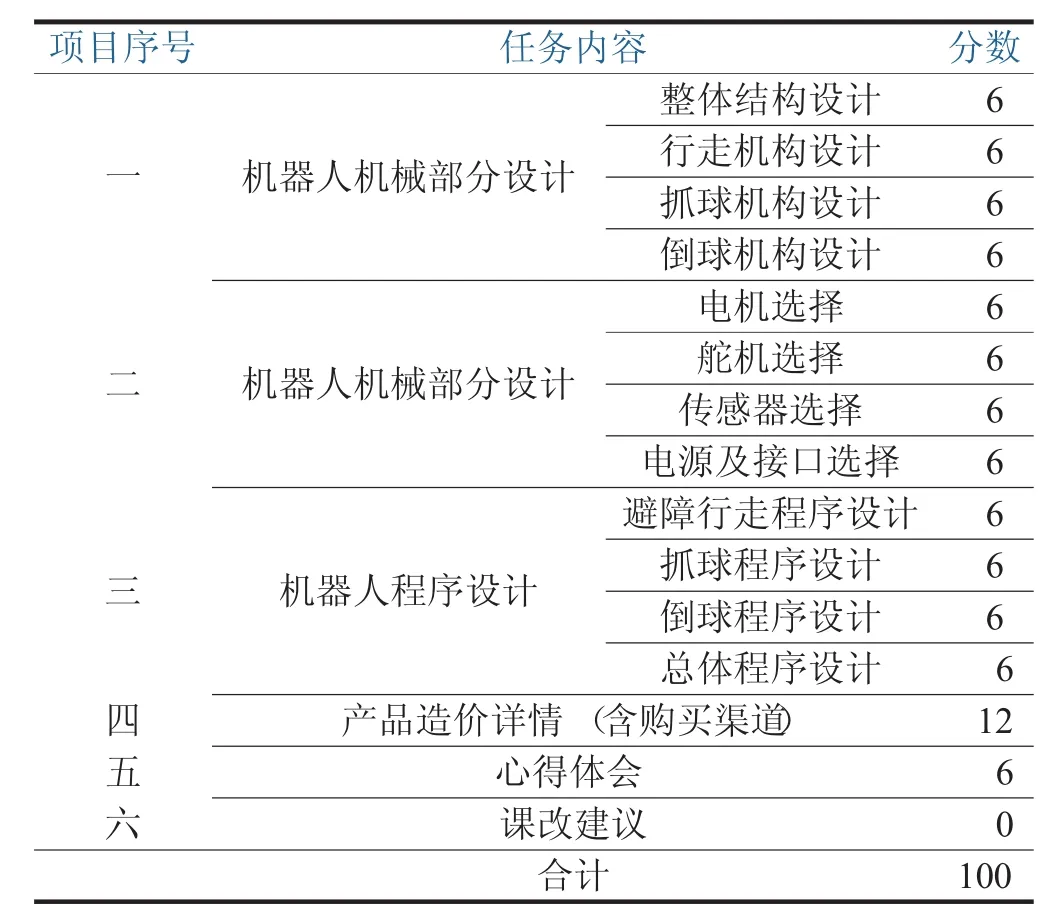
表2 實踐環節的分值設置
2.教學成果展示
(1)小車造型
學生自己動手,通過實際的加工,遇到困難自己尋求解決問題所需知識,打破了傳統的教學模式。加工完成的小車如圖1所示。
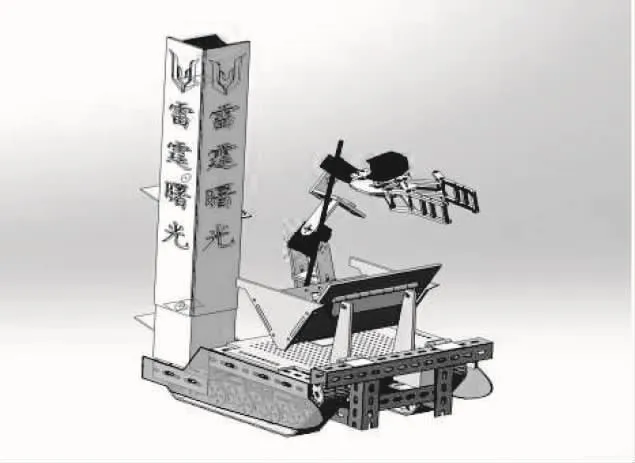
圖1 機器人小車三維總體設計
小車采用2輪履帶式進行避障行進,采用3自由度機械手臂結構,并用自制1自由度機械爪夾持機構以及絲杠倒球機構等共同組成機器人的整體結構。學生在設計過程中,結合了機械原理、機械設計及機械制造等專業知識理論,效果良好。
(2)行走裝置
本機器人采用12V傳動比為1:100的直流減速電機作為驅動,采用履帶式行進方式,來提供動力,從而穩定前進(如圖2所示)。
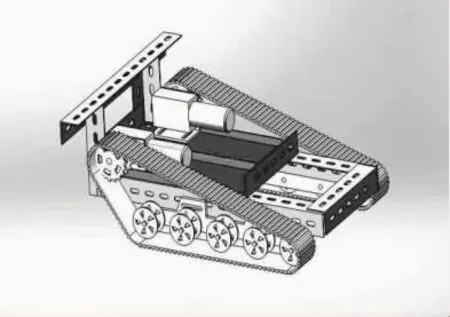
圖2 機器人行走裝置設計
(3)抓取裝置
抓取機構采用機械爪抓球實現撿球。設計采用舵機提供動力,齒輪嚙合,從而能更精確的抓取,從美觀的角度來講,也做到了機械爪之美(如圖3所示)。
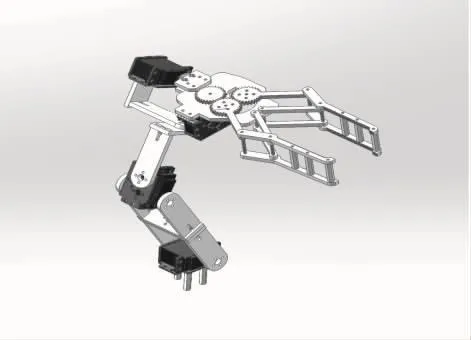
圖3 機器人抓取裝置設計圖
(4)運球裝置
運球裝置采用以12V直流電機作為驅動絲杠,使絲杠旋轉,從而使運球裝置翻轉,達到運球的目的(如圖4所示)。
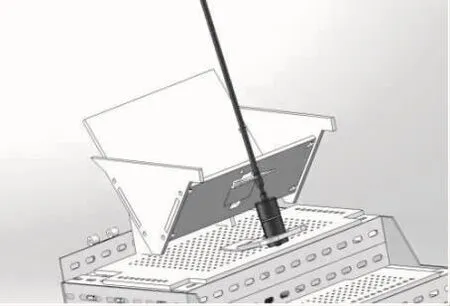
圖4 機器人運球存球裝置設計
(三)電控部分設計
1.電機選擇
根據模型預先布置好了軌跡以及工作時間要求,要求規定機器人需要行走的直線距離有兩段,一段為1 800 mm,另一段為600 mm。機器人需要行走的曲線距離也有兩段,一段是半徑為600 mm的1/4圓弧,另一段是半徑為600 mm的1/2圓弧。經過整合與分析之后,計算出整個賽道機器人需要行進的中心距離大約為5 235 mm,結合預留給機械手抓取圓球的時間總成估算為1分鐘,這樣留給行走的時間應控制在兩分鐘以內。
由于履帶底盤的驅動輪直徑為4.8 mm,即履帶輪的周長大約在151mm左右,用路程比上輪子周長做出電機最終輸出的轉速為17轉/分鐘。考慮到彎道會損耗速度按比例計算實際電機需要達到的轉速應該是22轉/分鐘,車體部分采用了鋼板角鐵等金屬結構,這樣可能導致車體本身偏重,所以電機需要一定的扭矩。在負載的影響下電機是不可能達到額定轉數的,為了控制速度,電機的額定轉數應控制在26轉/分鐘至30轉/分鐘之內。經過查閱相關電機參數最終選擇了一款額定轉數為27轉/分鐘、額定電壓為12 V、傳動比為1:290的直流減速電機作為主驅動電機。
2.舵機選擇
由于所撿圓球質量為60 g,外加機械臂的長度,故選用的舵機為MG996的舵機作為機械臂以及機械爪的關節部分,從而能夠支持機械爪以及球的重量。考慮到整個機械臂及機械爪的重量選用MG996遠遠不夠支持其總質量,故選LD-1501數字舵機1個,作為機械臂最底部的支撐,從而達到理想的狀態。
3.傳感器選擇
本機器人采用的傳感器是用3個紅外避障傳感器、2個紅外檢測球的傳感器組成。
4.電源選擇
因為本機器人整體質量較大,選用電機扭矩較大,故采用12V鋰電池作為電機驅動。另外,因為機械臂連接各驅動板,所以采用7.4V鋰電池來驅動機械臂以保證它動作穩定。為了更易于識別待檢測物體需電壓穩定,故采用7.4V電源單獨給各傳感器供電。
5.產品造價
(1)機械結構產品報價
機械結構產品報價如表3所示。
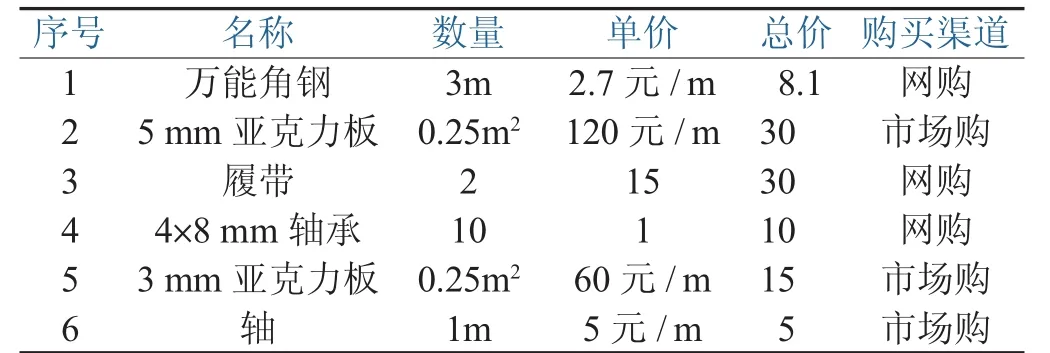
表3 機械結構產品報價
(2)機械電控產品報價
機械電控產品報價如表4所示。
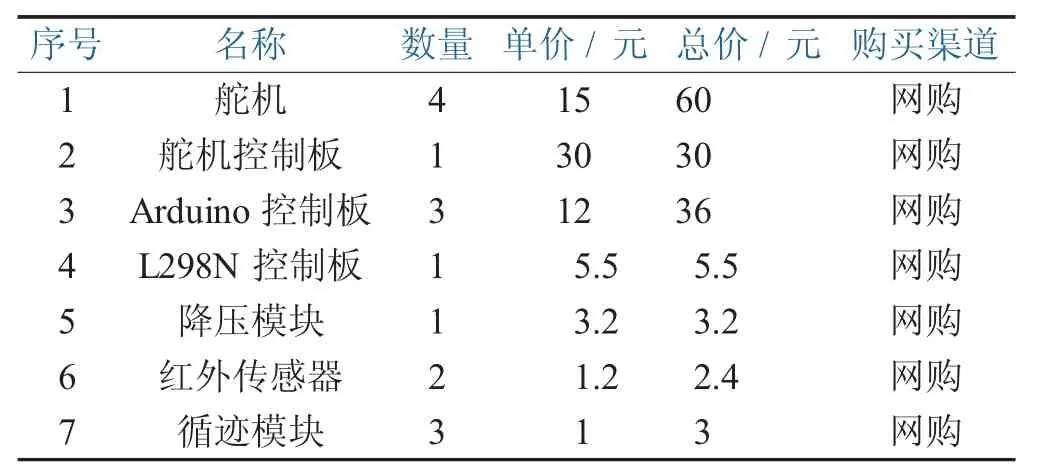
表4 機械電控產品報價
通過此次教學改革,達到了理實一體化的目的,提高了學生的學習熱情,提高了出勤率,更加深了前期知識機械原理、機械設計等知識掌握,對學生的專業提高起到了一定的促進作用,改革效果良好。在今后會繼續加大教改力度,真正實現應用型人才的培養,提高學生的實踐能力。
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
內蒙古教育(2021年20期)2021-03-08 01:09:14
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
計算機教育(2020年5期)2020-07-24 08:53:38
當代工人(2020年8期)2020-05-25 09:07:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09