雙繩纏繞式提升機鋼絲繩張力仿真及試驗驗證
2020-03-27 02:26:08許亞萍李濟順鄒聲勇
礦山機械 2020年1期
關鍵詞:模型
許亞萍,楊 芳,李濟順,,,鄒聲勇
1河南科技大學機電工程學院 河南洛陽 471003
2河南科技大學河南省機械設計及傳動系統重點實驗室 河南洛陽 471003
3礦山重型裝備國家重點實驗室 河南洛陽 471039
礦井提升裝備是礦產資源開采的關鍵設備。國內常見的提升機類型為單繩纏繞式提升機和多繩摩擦式提升機。然而,單繩纏繞式提升機的鋼絲繩和卷筒直徑會隨井深增大而大大增加,造成設備龐大、制造困難;多繩摩擦式提升機隨開采深度增加,鋼絲繩張力變化過大,從而嚴重影響鋼絲繩的使用壽命,故兩者均不適用于大于 1 500 m 的超深井提升[1]。多繩纏繞式提升機擁有單繩纏繞式提升機的纏繞特性,且具備多繩摩擦式提升機大載荷的提升特性[2],能很好地彌補以上兩者的缺陷,適合于深部礦產資源的開采,例如南非的多繩纏繞式提升機已被應用到 2 500 m 井深[3]。在國內,該類型提升機的研究工作仍處于起步階段,因此研究雙繩纏繞式提升機對于我國深部資源開采具有重要的意義。
國內外學者在提升系統建模方面已有一定研究基礎。S.Kacxmarczyk 和 W.Ostachowicz[4-5]建立了鋼絲繩懸繩段的橫向振動及懸垂段縱向振動的耦合振動方程,以此為基礎研究提升過程中鋼絲繩的動力學特性。曹國華等人[6]研究了變質量提升系統的振動特性,建立提升鋼絲繩軸向和扭轉的耦合振動模型,得到在振型函數隨系統質量變化或同定不變的情況下,鋼絲繩振動響應的求解辦法。朱真才等人[7]建立了箕斗裝載過程中鋼絲繩的縱向振動微分方程,通過振型疊加及數值計算的方法分析裝載過程中鋼絲繩的振動響應。龍靖宇等人[8]用小球體來模擬鋼絲繩,但不適用于鋼絲繩大柔性變形的情況。晉民杰等人[9]利用 ADAMS 的宏命令快速建立鋼絲繩動力學模型,基本實現鋼絲繩的參數化建模。劉義等人[10-11]利用ANSYS 和 RecurDyn 仿真軟件建立單繩纏繞式和多繩摩擦提升機的虛擬樣機模型,仿真與試驗的對比結果驗證了仿真模型的合理性。
上述研究主要針對單繩纏繞式提升機和多繩摩擦式提升機,對多繩纏繞式提升機的鋼絲繩動態特性研究還處于起步階段。本項目針對雙繩纏繞式提升機,利用 RecurDyn 軟件建立提升機虛擬樣機,并開展了雙繩纏繞式提升機張力變化的試驗研究,通過對比仿真和試驗結果驗證了建模方法的有效性。
1 雙繩纏繞式提升機拓撲結構
雙繩纏繞式提升機的主要構件有驅動主軸、卷筒、天輪、提升鋼絲繩、罐道、罐籠等。系統結構如圖 1 所示。
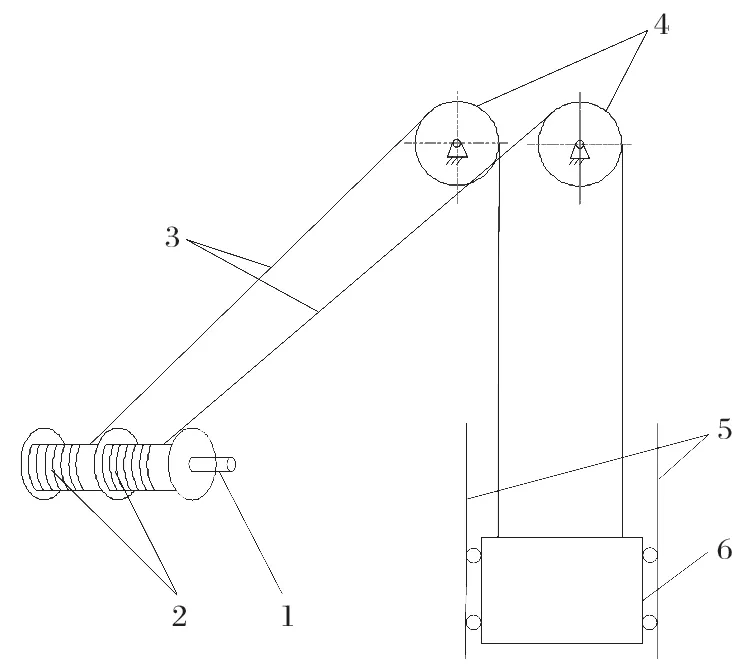
圖1 雙繩纏繞提升機結構示意Fig.1 Structural sketch of double-rope winding hoist
為了明確提升機各部件之間的連接關系,建立了雙繩纏繞式提升機的拓撲結構,如圖 2 所示。拓撲圖中各部件名稱如表 1 所列,拓撲圖中各約束名稱如表2 所列。
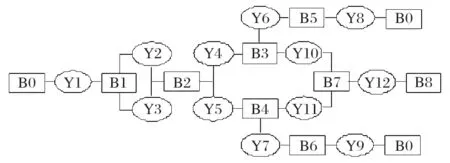
圖2 提升機拓撲圖Fig.2 Topological diagram of hoist
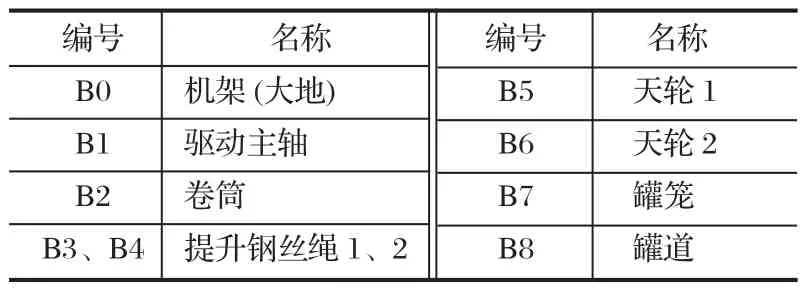
表1 部件名稱Tab.1 Name of components
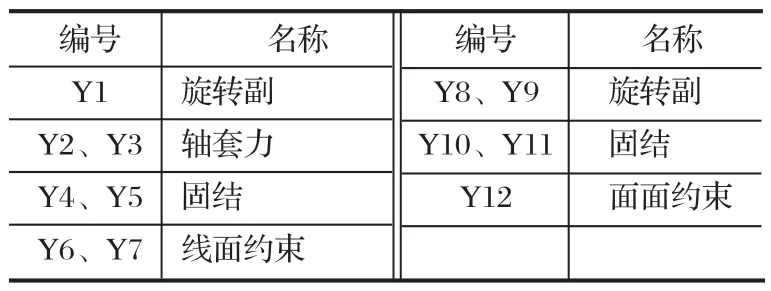
表2 約束名稱Tab.2 Name of constraint
2 虛擬樣機模型
2.1 建模流程
首先做如下假設:①2 個提升卷筒同軸且直徑相等,2 根驅動軸連接,同步同速驅動;② 不考慮各零部件之間的運動副間隙;③忽略提升容器所受的空氣阻力;④ 所有無相對位置變化的部件假設為一個整體。
將鋼絲繩視為柔性體,主軸、卷筒、罐道、罐籠及配重視為剛性體進行建模。利用 CATIA 的三維建模功能聯合多體動力學仿真軟件 RecurDyn,通過三維實體建模、柔性體建模、添加約束、設置邊界條件等步驟,最終完成對雙繩纏繞式提升機虛擬樣機的建模,建模流程如圖 3 所示。
2.2 實體建模
2.2.1 剛性體建模
在 CATIA 軟件中建立主軸、卷筒、天輪、罐籠及罐道的三維模型并完成裝配;導出為 step 格式文件,導入 RecurDyn 軟件中;將罐道建立在 Ground 環境中。添加各部件間約束如下:
(1)主軸與大地間定義旋轉副,添加驅動函數實現提升機的驅動工作;
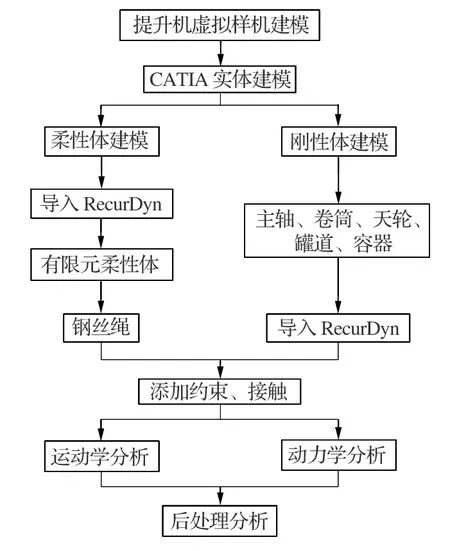
圖3 虛擬樣機建模流程Fig.3 Modeling process of virtual prototype
(2)主軸與卷筒間用軸套力連接;
(3)天輪與大地間定義旋轉副;
(4)罐耳與罐籠間定義旋轉副;
(5)罐耳與罐道間定義為面面接觸;
(6)在罐籠下方建立一個矩形體,與大地間定義固定副,矩形體與罐籠間定義為面面接觸;
(7)通過改變罐籠質量來模擬多種負載工況。
2.2.2 柔性體建模
在 RecurDyn 柔性體模塊中,梁單元的每個節點都有 6 個自由度,利用截面面積和 2 個面的慣性矩以及扭轉常數來描述單元的拉伸、壓縮、扭轉和彎曲等行為。在 CATIA 中建立鋼絲繩線體模型,并將其導入 RecurDyn 中,利用 Beam 梁單元模擬鋼絲繩。設置鋼絲繩材料屬性,根據式 (1)設置單元橫截面積、扭轉慣量及面極慣性矩等參數。鋼絲繩與卷筒間添加球鉸副,定義為柔性體與剛性體的面面接觸;鋼絲繩與天輪間定義為柔性體與剛性體的面面接觸;垂繩段鋼絲繩繩端與罐籠間添加固定副。

最終得到的雙繩纏繞式提升機虛擬樣機模型如圖 4 所示。
2.2.3 鋼絲繩接觸參數計算
提升機運行過程中,各部件之間存在大量的接觸,其中主要接觸參數有接觸剛度系數和接觸阻尼系數。
根據 M.Talia 等人[12]提出的基于 Hertz 理論和非線性彈簧阻尼模型,可以得到接觸剛度系數

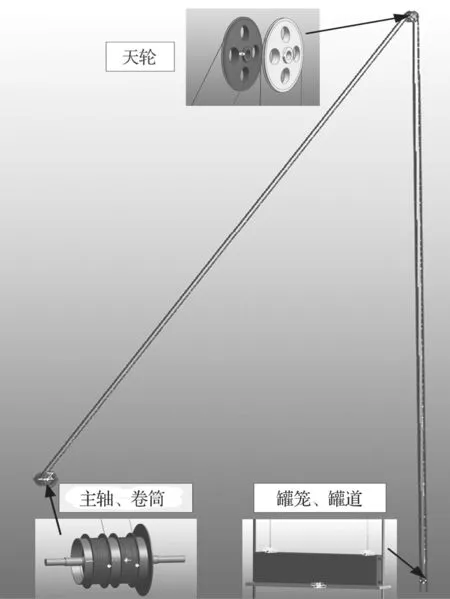
圖4 虛擬樣機模型Fig.4 Virtual prototype model
其中

式中:R1、R2為接觸構件在接觸點的曲率半徑;E1、E2為接觸構件等效彈性模量;u1、u2為接觸構件的泊松比。
對于阻尼系數的設定,系數在 1~10 N·s/mm比較符合實際運行過程中鋼絲繩的屬性[13]。根據經驗分別設置鋼絲繩、卷筒及天輪之間的阻尼系數為 1 N·s/mm,罐籠與罐道之間的阻尼系數為 10 N·s/mm。
2.3 仿真算例
2.3.1 仿真參數
以中信重工的雙繩纏繞式提升機試驗臺參數為例進行虛擬樣機模型的仿真計算。該試驗臺的鋼絲繩型號為 4V*39S+5FC,鋼絲繩彈性模量Er與鋼的彈性模量E的關系為

選取Er=0.5E=105 000 MPa,泊松比為 0.25。鋼絲繩參數如表 3 所列,雙繩纏繞提升機試驗臺主要參數如表 4 所列,虛擬樣機模型的邊界條件設置參數如表 5 所列。
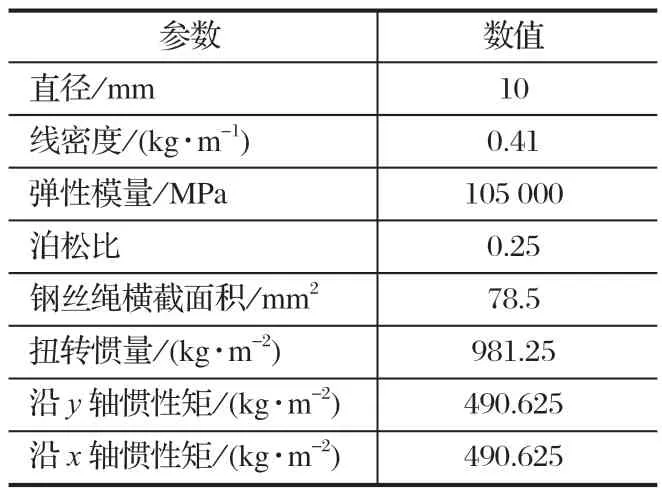
表3 鋼絲繩參數Tab.3 Parameters of wire rope
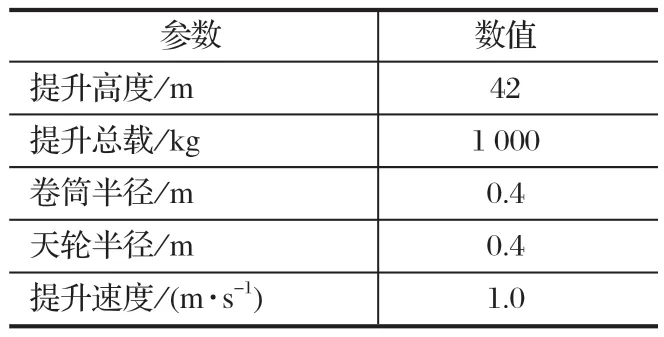
表4 試驗臺主要參數Tab.4 Main parameters of test bench
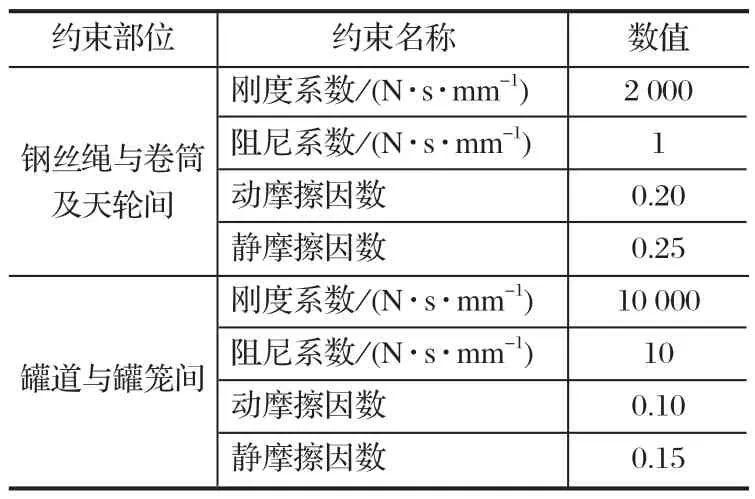
表5 系統主要接觸參數Tab.5 Main contact parameters of system
2.3.2 仿真結果
雙繩纏繞式提升機試驗臺采用了梯形速度曲線,速度變化規律如圖 5 所示。
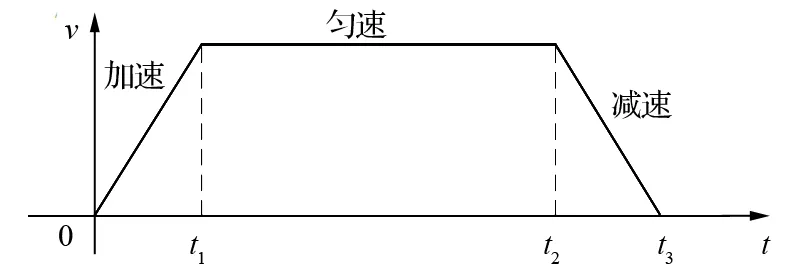
圖5 提升速度變化規律Fig.5 Variation laws of hoisting speed
在虛擬樣機主軸機構上添加 step 函數來編寫提升機的運行速度曲線。為避免初始時段由鋼絲繩自重引起的劇烈振動,先將罐籠緩慢提升至離開地面,靜止到鋼絲繩振動趨于平穩后再進行提升。驅動函數如表6 所列。

表6 驅動函數Tab.6 Drive function
以提升鋼絲繩 1 與罐籠連接節點處的仿真結果為例,得出該節點處張力、速度、加速度、位移隨時間的變化,如圖 6 所示。
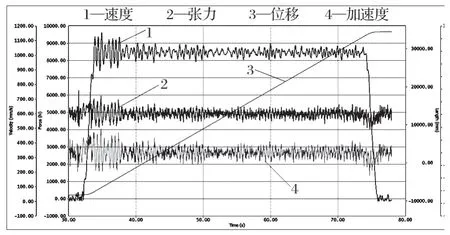
圖6 虛擬樣機仿真結果Fig.6 Simulation results of virtual prototype
3 試驗驗證
3.1 雙繩纏繞式提升機試驗臺
多繩纏繞式提升機試驗臺實物圖及主要工作組件如圖 7 所示。
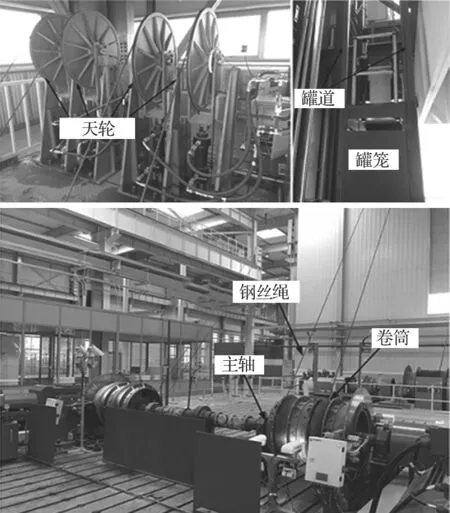
圖7 雙繩纏繞式提升機試驗臺Fig.7 Test bench for double-rope winding hoist
測量鋼絲繩張力的 4 個拉壓力傳感器安裝在鋼絲繩與罐籠連接處,其他電器裝置均安裝在加固型機箱中。機箱通過減震裝置安裝于提升容器內,隨提升容器上下移動,其安裝位置如圖 8 所示。該裝置可通過無線通信模塊遠程控制數據采集和試驗結果的數據傳輸,供電方式為蓄電池供電。
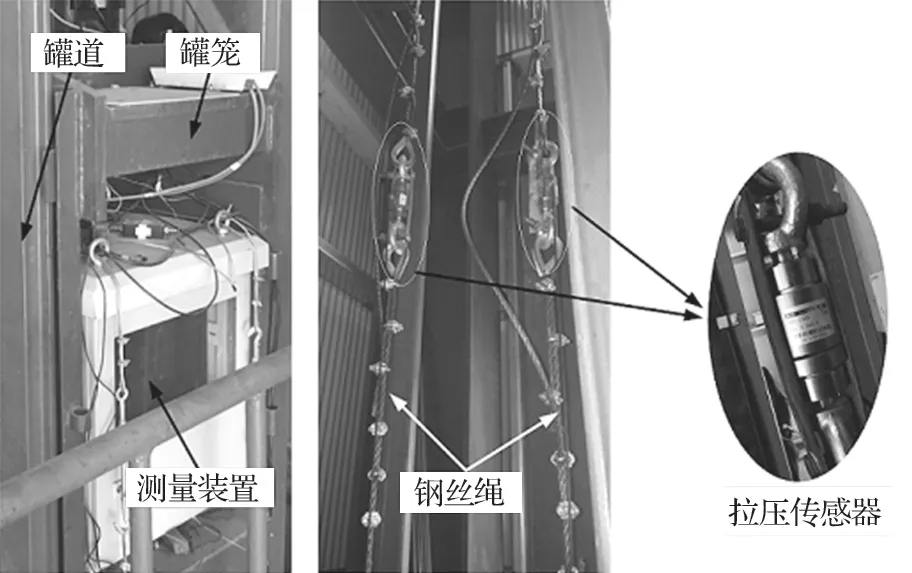
圖8 鋼絲繩張力測量裝置Fig.8 Wire rope tension measuring device
3.2 仿真與試驗結果分析
由于試驗臺存在制造誤差,2 根提升鋼絲繩存在張力差,故針對 2 根提升鋼絲繩張力進行研究,仿真與試驗數據如圖 9 所示。仿真與試驗得出的張力曲線隨時間變化的趨勢基本吻合,由于數據結果中包含了多個頻率成分,將部分高頻成分剔除,只保留張力曲線的基本變化趨勢。采用低通濾波的方法對仿真和試驗數據進行處理,結果如圖 10 所示。
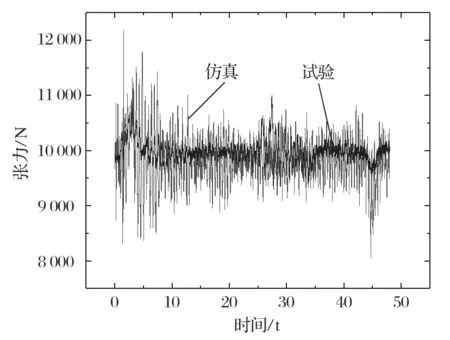
圖9 提升鋼絲繩張力仿真與試驗結果Fig.9 Simulation and test results of tension of hoisting wire rope
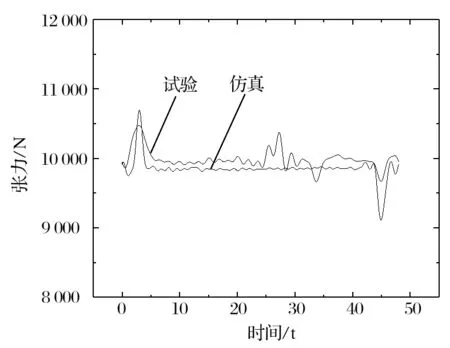
圖10 仿真與試驗對比Fig.10 Comparison between simulation and test
由圖 10 可知,提升鋼絲繩張力的仿真值與試驗值變化曲線具有相同的趨勢,均為三段式,依次為加速、勻速和減速 3 個階段。勻速段仿真與試驗值均在9 800~10 000 N 左右,與實際提升容器質量為 1 t 的重力基本對應。該結果能在一定程度上有效反映鋼絲繩張力的變化歷程和范圍。
由于試驗環境為非理想狀態,鋼絲繩張力試驗結果大于仿真結果。試驗結果在勻速段中間部位 (提升高度為 25 m 左右)出現張力較大波動,是由于試驗臺罐道安裝存在不平穩點 (焊接點)而受到沖擊產生的波動。以上結果分析驗證了仿真模型的合理性與準確性。
4 結論
(1)基于虛擬樣機技術,利用多體動力學仿真軟件 RecurDyn 建立雙繩纏繞式提升機虛擬樣機模型。建立了連續體鋼絲繩模型,利用柔性體上節點的相對變形來描述柔性體的連續變形。
(2)以提升鋼絲繩為研究對象,對提升鋼絲繩張力進行仿真研究,得到了提升鋼絲繩在加速、勻速及減速過程中的張力變化。
(3)仿真結果與試驗結果的對比分析表明,張力值隨時間的變化趨勢基本一致,勻速段鋼絲繩張力變化在合理范圍內,驗證了模型的可靠性與準確性。
該模型可用于對雙繩纏繞式提升機鋼絲繩張力變化及傳遞特性進行仿真分析,為進一步研究超深井提升機提供了虛擬樣機模型,能夠減少試驗費用,縮短研發周期,具有較好的實用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
