六自由度液壓換刀機械臂的設計與分析
2020-03-27 02:25:44孫顏明徐莉萍任德志
礦山機械 2020年1期
關鍵詞:機械
孫顏明,徐莉萍,任德志
1河南科技大學機電工程學院 河南洛陽 471003
2鄭州科技學院機械工程學院 河南鄭州 450064
在 盾構機施工過程中,刀具的磨損不可避免。當?shù)毒吣p到一定程度時,便需要對刀具進行更換,否則會損壞盾構機的刀盤,影響盾構機的正常掘進,甚至會縮短盾構機的壽命。根據(jù)調(diào)查發(fā)現(xiàn),目前盾構機換刀采用的人工更換方案,不僅耗資大、耗時長,且嚴重危害作業(yè)人員的健康[1]。國外通過對KUKA 機械臂進行改造,用于盾構機刀具的拆卸與安裝[2],但由于該機械臂本體結構的局限性,導致其不能很好地適應盾構機內(nèi)部環(huán)境。
筆者根據(jù)盾構機內(nèi)部結構,以及液壓技術的發(fā)展,設計了一款盾構機專用的液壓驅(qū)動換刀機械臂,以降低盾構機換刀的成本,提高換刀效率與總體施工效率,保證整個隧道施工過程的順利進行。通過對換刀機械臂進行運動學分析和軌跡規(guī)劃研究,為其運動規(guī)劃、智能控制等研究提供依據(jù)。
1 換刀機械臂本體設計
1.1 技術難點分析
通過對現(xiàn)有人工進倉換刀方案進行分析,結合盾構機的結構環(huán)境,確定換刀機械臂的作業(yè)流程:盾構機停機,確定需要更換刀具的具體位置;機械臂帶動末端手爪抓取需要更換的磨損刀具;將抓取的刀具帶回艙體內(nèi);攜帶新的刀具運動到刀盤相應位置并進行安裝;繼續(xù)下一刀具的更換任務;完成換刀任務后,機械臂縮回艙體內(nèi),關閉艙門,刀盤旋轉,盾構機繼續(xù)工作。
通過分析以上工作流程,總結出機械臂換刀主要面臨以下困難:對換刀機械臂的負載能力有較高要求;盾構機內(nèi)部空間有限,換刀機械臂應當具有較高的靈活性;工作環(huán)境惡劣。
1.2 總體設計
通過綜合考慮換刀機械臂的作業(yè)要求和環(huán)境限制,確定換刀機械臂為 6 自由度關節(jié)構型,即 J1 基座回轉、J2 大臂俯仰、J3 小臂俯仰、J4 腕關節(jié)俯仰、J5 腕關節(jié)擺動和 J6 腕關節(jié)回轉,此外,手爪的開合自由度能實現(xiàn)對刀具抓取。針對盾構機對換刀機械臂的結構緊湊、末端負載較大的需求,機械臂各關節(jié)均采用液壓驅(qū)動,即通過直線液壓缸、液壓馬達與擺動液壓缸來實現(xiàn)關節(jié)的俯仰和擺動。換刀機械臂整體結構如圖 1 所示。

圖1 盾構機換刀機械臂的整體結構Fig.1 Overall structure of tool-changing manipulator for shield machine
2 運動學分析
2.1 換刀機械臂正運動學分析
換刀機械臂為六自由度開鏈機構,采用標準D-H 參數(shù)法將連桿固定形成坐標系,則機械臂的連桿坐標系如圖 2 所示,其具體 D-H 參數(shù)如表 1 所列。
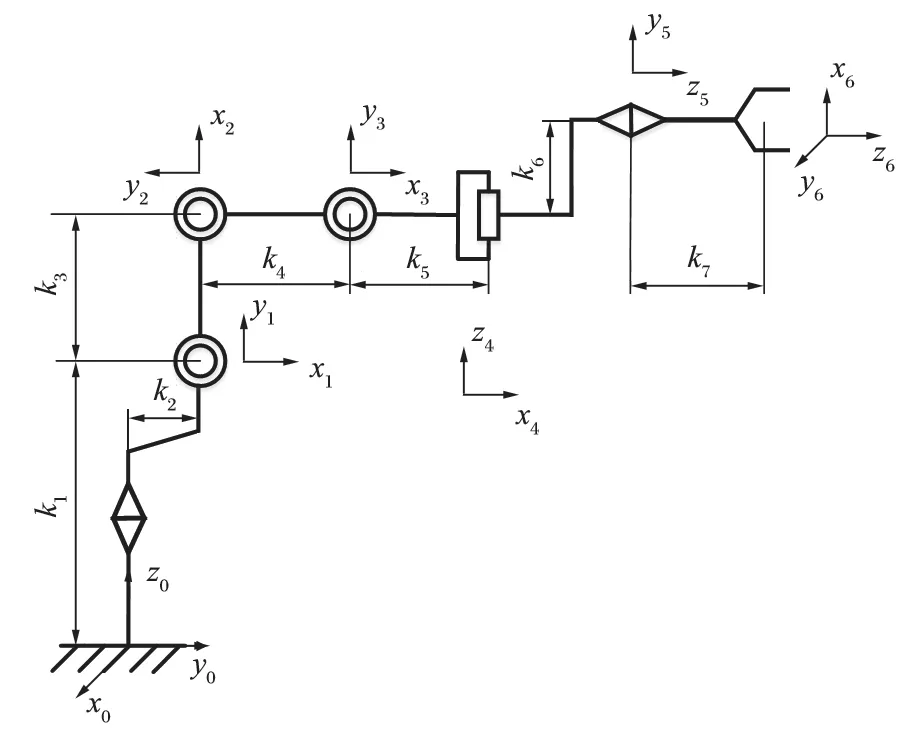
圖2 換刀機械臂連桿坐標系Fig.2 Linkage coordinate system of tool-changing manipulator

表1 機械臂的 D-H 參數(shù)Tab.1 D-H parameters of manipulator
表1 中,k1=200,k2=140,k3=880,k4=560,k5=175,k6=40,k7=552。
連桿坐標系間的變換為
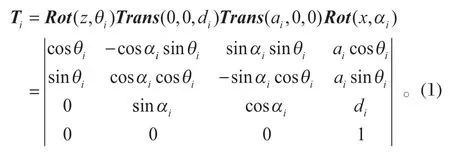
將表 1 中的參數(shù)代入式 (1),獲得相鄰連桿坐標系之間的齊次變換矩陣T1、T2、T3、T4、T5、T6,則換刀機械臂末端手爪在基坐標系下的位姿可表示為
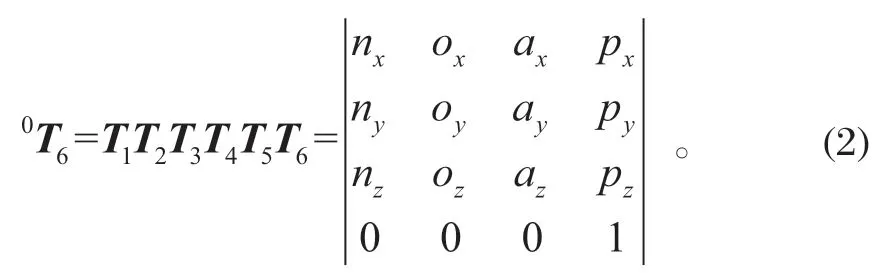
式中:[nx ny nz]T、[ox oy oz]T、[ax ay az]T為機械臂末端相對于基座坐標系的姿態(tài)向量;[px py pz]T為機械臂末端在基坐標系的位置向量。
2.2 換刀機械臂逆運動學分析
根據(jù)機械臂在基坐標下的末端位姿,進行關節(jié)角的求解就是機械臂的逆問題。由于所研究的機械臂滿足 Pieper 法則,即第 2、3、4 關節(jié)的軸線相互平行,因此通過解析法進行機械臂的逆運動學求解。
(1)首先,已知機械臂末端在基坐標下的位姿如式 (2)所示,將式 (2)左乘T1的逆矩陣、右乘T6的逆矩陣,得

根據(jù)式 (3)左、右兩邊矩陣對應的元素相等,由第 3 行第 4 列元素相等,得:
①當k7ay-py=0 時,若k7ax-py>0,θ1=0;若k7ax-py<0,θ1=180°。
② 當k7ax-px=0 時,θ1=90°。
③其他情況下,

(2)由式 (3)兩邊矩陣第 3 行第 3 列元素相等得

(3)由式 (3)兩邊第 3 行第 2 列元素相等得:
①當oycosθ1-oxsinθ1=0 時,若nycosθ1-nxsinθ1>0,θ6=0;若nycosθ1-nxsinθ1<0,θ6=180°。
② 當nycosθ1-nxsinθ1=0 時,θ6=90°。
③其他情況下,

(4)由于機械臂的第 2、3、4 關節(jié)軸線平行,因此構成圖 3 所示的平面 2R 機械臂,此時第 2 關節(jié)的坐標原點o1為該 2R 機械臂的基座,第 4 關節(jié)的坐標原點o3為機械臂的末端。機械臂末端o3在基坐標系o1下的位姿為


圖3 第 2、3、4 關節(jié)構成的平面 2R 機械臂Fig.3 2R plane manipulator consisting of joint 2,3,4
由于式 (4)右端矩陣第 1 行第 4 個元素r(1,4)、第2 行第 4 個元素r(2,4)分別表示o3在o1下的笛卡爾坐標,因此

在△o1o2o3中,由余弦定理得

根據(jù)式 (5)、(6)得

(5)由于
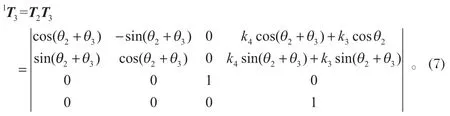
式 (7)與式 (4)第 3 行第 1 列元素相等,且其本體結構的限制θ4∈[20°,65°],因此θ4有唯一解,
θ4=-arctan (cosθ5(sinθ6(oycosθ1-oxcosθ1)-cosθ6(nycosθ1-nxsinθ1))-sinθ5(aycosθ1-axsinθ1))/(sinθ6(nycosθ1-nxsinθ1)+cosθ6(oycosθ1-oxsinθ1))。
(6)由式 (7)與式 (4)第 2 行第 2 列元素相等,得θ2=arccos (sinθ4(azsinθ5+cosθ5(nzcosθ6-ozsinθ6))+cosθ4(ozcosθ6+nzsinθ1))-θ3。
3 MATLAB 仿真驗證
3.1 運動學仿真
為進行運動學分析驗證,隨意給定機械臂 1 組關節(jié)向量θ=[π/2,π/6,-π/3,π/3,π/2,0]T,將其代入機械臂式 (2),則末端相的位姿矩陣
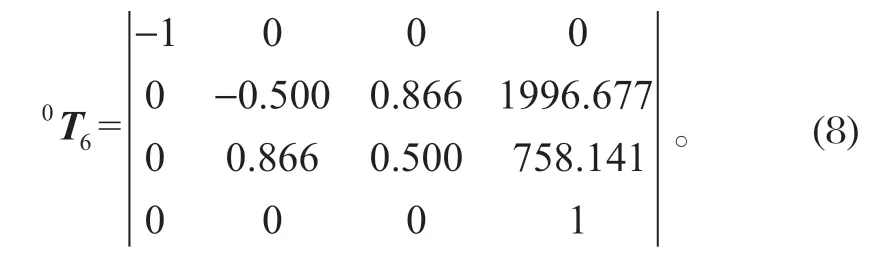
為進行驗證,通過 Robotics Toolbox 進行機械臂的建模,并給定機械臂的關節(jié)變量θ=[π/2,π/6,-π/3,π/3,π/2,0]T,機械臂的位姿如圖 4 所示,仿真結果的位姿與式 (8)理論計算結果一致,表明運動學計算的正確性。

圖4 給定關節(jié)變量換刀機械臂的位姿仿真Fig.4 Posture simulation of tool-changing manipulator at given joint parameters
3.2 可達工作空間分析
工作空間表示機械臂末端執(zhí)行器所能到達的空間幾何,是機械臂的重要指標之一[3-4]。
借助 MATLAB 軟件,基于蒙特卡羅法,采用隨機取樣的方法隨機生成機械臂的關節(jié)變量值,然后將其代入式 (2),生成隨機的機械臂末端參考點。大量隨機的末端參考點構成如圖 5 所示的工作空間云圖。由于機械臂的主要工作面為盾構機的軸截面,即基坐標系下的y0o0z0平面,因此,令θ1=90°,其他關節(jié)為隨機值,可獲得圖 6 所示的機械臂活動范圍。

圖5 機械臂工作空間云圖Fig.5 Contours of manipulator workspace
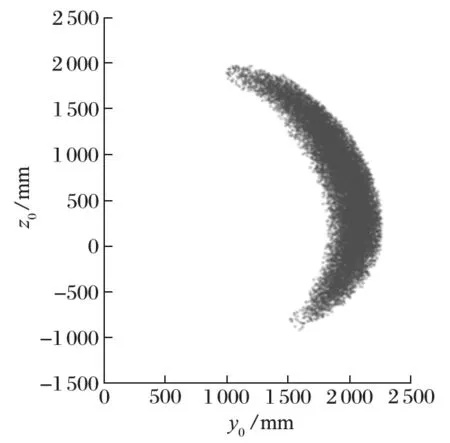
圖6 工作空間在 o0y0z0平面的截面Fig.6 Section of workspace on plane o0y0z0
從圖 5、6 中可以獲得換刀機械臂的主要作業(yè)范圍:最大作業(yè)半徑為 2 270 mm;最大作業(yè)高度為 2 000 mm;最大作業(yè)深度為 920 mm。即機械臂的作業(yè)空間較大,可滿足盾構機對作業(yè)空間的需求。
3.3 軌跡規(guī)劃研究
由于關節(jié)空間下的路徑規(guī)劃[5]能直接反映出機械臂各關節(jié)的運動情況,因此筆者采用五次多項式插值在關節(jié)空間下進行軌跡規(guī)劃。設規(guī)劃時間tf=30 s,機械臂的初始位姿對應的關節(jié)量θ(0)=[π/4,π/3,-π/4,π/3,5π/4,0]T,目標點位姿對應的關節(jié)量θ(30)=[π/2,π/6,-π/3,π/4,π/2,π/4]T,通過五次多項式插值,獲得各關節(jié)角位移曲線、角速度曲線、角加速度曲線分別如圖 7~9 所示。

圖7 各關節(jié)角位移曲線Fig.7 Angular displacement curves of various joints
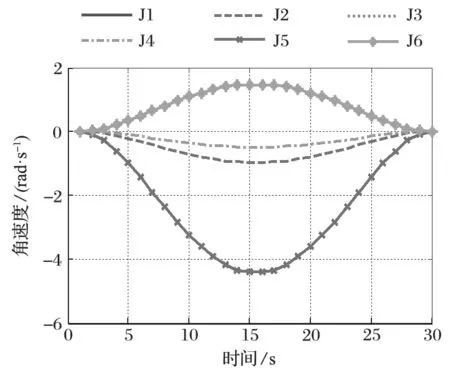
圖8 各關節(jié)角速度曲線Fig.8 Velocity curves of various joints
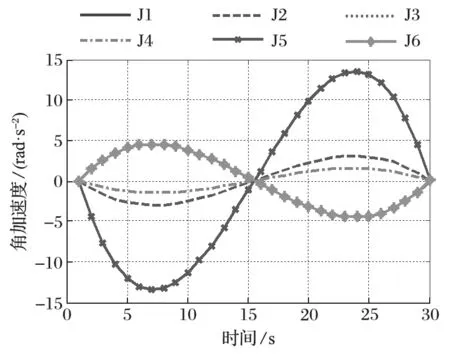
圖9 各關節(jié)角加速度曲線Fig.9 Angular acceleration curves of various joints
通過軌跡規(guī)劃仿真發(fā)現(xiàn),采用五次多項式插值后,各關節(jié)的角位移、角速度、角加速度曲線都較為光滑,能夠用于實現(xiàn)機械臂的動作。由圖 7 可知,各關節(jié)角速度在 15 s 時最大,并且在 30 s 時,各關節(jié)速度為零,停止動作;由圖 8 可知,各關節(jié)角加速度服從正 S 曲線,先為正,后為負,并且在 30 s 時速度都為零 (J1 與 J6 關節(jié)角速度曲線重合、J3 與 J4 關節(jié)角速度曲線重合);由圖 9 可知,第 5 關節(jié)在動作過程中角加速度較大 (J1 與 J6 關節(jié)角加速度曲線重合、J3 與 J4 關節(jié)角加速度曲線重合),因此其驅(qū)動力矩也應最大,在進行液壓系統(tǒng)設計與控制時,應加以注意。
4 結論
通過對盾構機換刀任務進行分析,設計了一種針對盾構機換刀的液壓換刀機械臂。針對機械臂的構型特點,建立各連桿坐標系,對其進行運動學建模,獲得末端手爪相對于基座的位置坐標和關節(jié)空間與笛卡爾空間的映射關系。借助 MATLAB 軟件,基于蒙特卡羅法,得到機械臂的工作空間云圖,獲得其工作范圍。采用 MATLAB 軟件進行機械臂關節(jié)空間下的五次多項式軌跡規(guī)劃,仿真結果表明,機械臂動作平穩(wěn),為機械臂的設計開發(fā)和后續(xù)的研究提供參考。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
