摩擦提升機天輪狀態的測試分析
2020-03-24 04:57:16郭鋒,馬馳
礦山機械 2020年3期
郭 鋒,馬 馳
1山東省天安礦業集團有限公司 山東濟寧 273100 2中國礦業大學機電學院 江蘇徐州 221008
天 輪是多繩摩擦提升系統的重要組成部件,直接關系到提升系統的安全[1],在當前開采深度日益加大的形勢下尤為重要。以天輪偏擺為例,嚴重的天輪偏擺會導致鋼絲繩弦振動異常,危及提升安全。
1 天輪故障分析
繩弦的強迫振動示意如圖 1 所示。在天輪周期性偏擺的激勵下,繩弦在不同位置、不同時間的位移響應可表示為
式中:y(x,t)為繩弦在位置x、時間t的位移響應;ω i為鋼絲繩的固有頻率;A為激勵的位移幅值;ω為激勵頻率;L為繩弦的長度。

圖1 繩弦的強迫振動示意
當繩弦的振幅過大時,可能造成相鄰兩根鋼絲繩之間出現碰擦[2]。此外,長期工作在交變重載下的軸承若出現外環、內環、滾動體等故障,也會對提升系統的安全運行構成嚴重威脅。因此天輪的運行狀態檢測和健康狀態評價是非常必要的。
2 天輪狀態測試系統構建
筆者以某煤礦 2 號主井落地式多繩摩擦提升系統為例。該系統在過去一段時間曾出現過繩弦振動和天輪繩槽磨損加劇的情況,天輪更換頻率亦高于往常,在很大程度上已經威脅到提升作業的安全性。該天輪相關的技術參數如表 1 所列。為準確掌握和分析天輪狀態,筆者構建了如圖 2 所示的天輪狀態測試系統[3]。采用激光式位移傳感器采集天輪的偏擺信號;采用振動加速度傳感器采集軸承座振動信號。偏擺信號和振動信號經由基于 USB 總線的采集卡獲取并傳輸至計算機,由計算機完成信號的后續處理和分析。
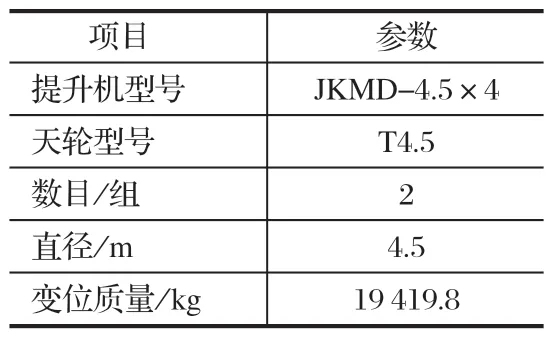
表1 天輪技術參數

圖2 天輪狀態測試系統硬件構架
偏擺激光位移傳感器的安裝如圖 3 所示,采用可調節式儀器表安裝激光位移傳感器。儀器表座通過磁性吸座固定于天輪平臺,通過加長桿和連接桿的適當調節使激光位移傳感器的工作面平行并靠近天輪輪邊。振動傳感器的安裝也采用磁吸方式,其動態特性可以滿足本測試任務的要求。

圖3 激光位移傳感器的安裝
3 測試結果與分析
測試系統構建完畢后,現場采集信號。由于在不同工況下天輪的運行狀態會有所不同,因此在偏擺和振動信號的采集過程中應以運行速度、載荷、上提和下放等工況加以區分。圖 4、5 所示為所采集到的 1 號天輪偏擺的時域和頻域信號,對應工況為上提重載,運行速度為 9 m/s。時域中信號的起始段和結尾部分對應提升機運行的加速和減速階段,中間區域為等速運行階段。選取該勻速段進行信號的處理與分析。在時域中對天輪偏擺進行計算,得到其偏擺為 4 mm。再觀察頻域信號,發現其主要頻率成分為 0.64、1.28、1.92 Hz,對應幅值大小分別為 0.65、0.67 和 0.44 mm。
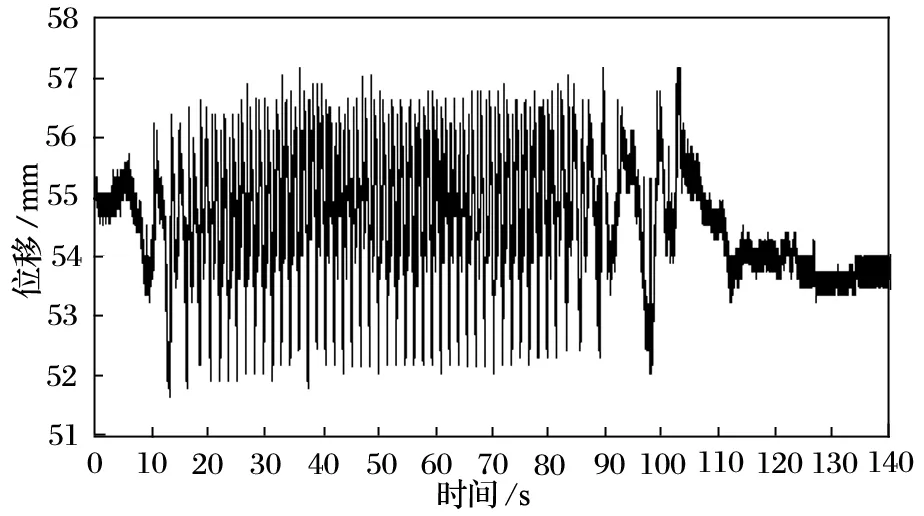
圖4 1 號天輪偏擺時域信號
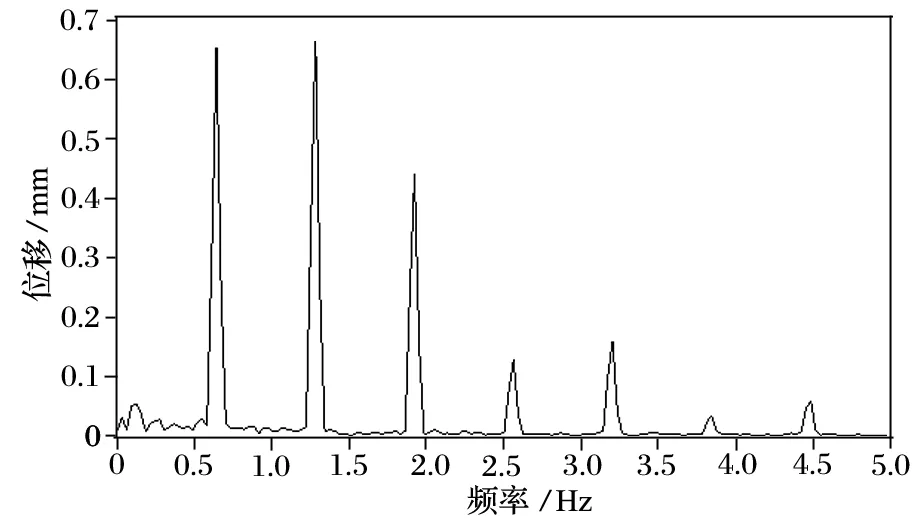
圖5 1 號天輪偏擺頻域信號

圖6 左軸承座軸向振動加速度時域信號

圖7 左軸承座軸向振動加速度頻域信號
測取的左側軸承座軸向振動信號如圖 6、7 所示,分別為其時域和頻域的波形。圖 6 振動時域信號中包含了加速、等速、減速等階段。圖 7 為等速階段頻譜分析的情況,可見該處的振動加速度幅值較小,主要頻率成分為 1.77、3.84、5.12、6.37 和 18.57 Hz 等。
根據上述方法完成對全部天輪的偏擺和軸承座的振動信號測試。依據 《煤礦礦井機電設備完好標準》,多繩摩擦提升天輪直徑為 4 m 時,要求軸向端面跳動小于 4 mm。結合本次測試結果可知,上天輪的偏擺量均處于正常范圍,而下天輪中的 2 和 4 號偏擺量高達 7.5 和 15.5 mm,嚴重超出允許的范圍。從其頻譜中也不難發現,其 2 倍頻 1.28 Hz 已躍居為主要頻率成分,3 倍頻 1.92 Hz 處的幅值也已經接近基頻 0.64 Hz。這些情況表明,下天輪已經發生了較為嚴重的變形,而這也正是近段時間以來繩弦振動顯著異常的根源,須進行針對性的維修甚至更換,以消除其對提升安全構成的威脅。因滾動體在軸承內部高速旋轉,軸承座處振動信號的頻域成分 (見圖 7)比天輪 (見圖 5)更豐富,但其中尚未見突出的故障頻率成分。
4 結語
構建了天輪狀態測試系統,獲取了天輪偏擺和軸承座振動的時頻域信號。其中,通過對偏擺信號時頻域的分析發現下天輪的偏擺已經嚴重超標,變形明顯。正是在其激勵下,該提升系統的繩弦出現了異常振動。可見,基于天輪狀態測試可以及時有效地發現故障,為提升系統的維修和維護提供數據支持,有利于保障提升作業的安全性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
