基于 LabVIEW 疲勞試驗(yàn)機(jī)模糊 PID控制系統(tǒng)研究
2020-03-24 04:57:16
礦山機(jī)械 2020年3期
關(guān)鍵詞:規(guī)則
河南科技大學(xué)機(jī)電工程學(xué)院 河南洛陽 471003
工 業(yè)生產(chǎn)中,測(cè)試零部件疲勞壽命對(duì)于保證機(jī)械設(shè)備的安全運(yùn)轉(zhuǎn)具有重要意義。疲勞試驗(yàn)機(jī)是精確測(cè)試材料疲勞壽命的常用設(shè)備[1]。目前,市面上的拉壓式疲勞試驗(yàn)機(jī)大多是以液壓缸作為動(dòng)力源,采用傳統(tǒng) PID 算法來實(shí)現(xiàn)閉環(huán)控制。采用上述方案的拉壓式疲勞試驗(yàn)機(jī)結(jié)構(gòu)復(fù)雜,并且控制系統(tǒng)超調(diào)極易引起機(jī)械結(jié)構(gòu)的過沖,導(dǎo)致試樣提前失效,進(jìn)而影響疲勞試驗(yàn)的精準(zhǔn)性[2]。
國內(nèi)外研究者對(duì)于疲勞試驗(yàn)機(jī)控制方案的研究從未間斷,國外先進(jìn)的試驗(yàn)機(jī)制造商如 Instron、島津、MTS,均推出了基于自適應(yīng)式控制策略的產(chǎn)品。但是由于試樣種類的多樣性,同一試驗(yàn)機(jī)對(duì)于不同的試驗(yàn)對(duì)象,在實(shí)際測(cè)試中存在非線性、參數(shù)時(shí)變性等問題,難以真正實(shí)現(xiàn)精準(zhǔn)控制,試驗(yàn)加載過程中的超調(diào)問題依然存在[3-4]。
為了解決傳統(tǒng) PID 系統(tǒng)超調(diào)的問題,筆者設(shè)計(jì)了采用模糊 PID 控制算法的疲勞試驗(yàn)機(jī)控制系統(tǒng)。該系統(tǒng)由交流伺服電缸提供動(dòng)力。模糊 PID 控制算法具有適應(yīng)性強(qiáng)、動(dòng)態(tài)響應(yīng)快、控制精度高等優(yōu)勢(shì)[5],而伺服電缸的傳動(dòng)效率高,位置精度可以達(dá)到 0.01 mm[6]。筆者將二者優(yōu)勢(shì)結(jié)合起來,基于 LabVIEW 平臺(tái)對(duì)試驗(yàn)機(jī)的控制系統(tǒng)進(jìn)行了開發(fā)。試驗(yàn)結(jié)果表明,模糊 PID控制算法對(duì)于疲勞試驗(yàn)機(jī)具有良好的控制效果,能夠有效地降低系統(tǒng)超調(diào)量,且動(dòng)態(tài)響應(yīng)速度也有所提高。
1 硬件方案
疲勞試驗(yàn)機(jī)是一個(gè)單軸運(yùn)動(dòng)控制試驗(yàn)平臺(tái),主要功能是能夠?qū)崿F(xiàn)對(duì)試樣進(jìn)行精準(zhǔn)地循環(huán)拉壓或單向拉壓。試驗(yàn)機(jī)結(jié)構(gòu)如圖 1 所示。試驗(yàn)機(jī)主要由拉壓傳感器、上下夾具、引伸計(jì)、機(jī)械主體、伺服電缸、計(jì)算機(jī)運(yùn)動(dòng)控制卡、伺服驅(qū)動(dòng)器及數(shù)據(jù)采集卡等部件組成。拉壓傳感器型號(hào)為 HSTL-BLY,位于試驗(yàn)機(jī)底部,通過特殊聯(lián)結(jié)器與下夾具聯(lián)接;試樣裝夾在上下夾具之間;引伸計(jì)型號(hào)為 CBY1 25 -±2.5,加持在試樣上;伺服電缸位于機(jī)械結(jié)構(gòu)頂端,由交流伺服電動(dòng)機(jī)提供動(dòng)力,通過法蘭與上夾具聯(lián)接;運(yùn)動(dòng)控制卡為雷賽 DMC2410C 控制器,通過 PIC 端口安裝于計(jì)算機(jī)內(nèi)部;伺服驅(qū)動(dòng)器和數(shù)據(jù)采集卡固定在外圍電路的板材上。
2 控制原理
傳統(tǒng)疲勞試驗(yàn)機(jī)大多采用傳統(tǒng) PID 控制器。因試驗(yàn)機(jī)本身的諸多特性,如時(shí)變性、非線性,加之在試驗(yàn)加載中存在的負(fù)載干擾,導(dǎo)致試驗(yàn)機(jī)很難設(shè)置最佳的 PID 參數(shù)。因此,傳統(tǒng) PID 對(duì)試驗(yàn)加載的整個(gè)過程難以做到精準(zhǔn)控制,系統(tǒng)超調(diào)問題也屢見不鮮[7]。
模糊 PID 控制器是一種新型的控制器。該控制器是在傳統(tǒng) PID 控制器前端加入了模糊邏輯,故其集合了模糊控制的靈活性和 PID 控制器的強(qiáng)適應(yīng)性[8]。

圖1 試驗(yàn)機(jī)結(jié)構(gòu)Fig.1 Structure of testing machine
該控制器為二維模糊自適應(yīng) PID 控制器,模糊控制原理如圖 2 所示。計(jì)算機(jī)程序調(diào)用 DLL 文件 (動(dòng)態(tài)鏈接庫)把應(yīng)變量 (轉(zhuǎn)化為位移量)等參數(shù)信息和控制指令生成運(yùn)動(dòng)代碼發(fā)送給運(yùn)動(dòng)控制卡,運(yùn)動(dòng)控制卡規(guī)劃運(yùn)行路線,并把速度指令發(fā)送給伺服驅(qū)動(dòng)器,驅(qū)動(dòng)器一方面把脈沖信號(hào)輸送至伺服電缸,另一方面讀取編碼器信號(hào)反饋給運(yùn)動(dòng)控制卡,形成內(nèi)環(huán) (速度環(huán))控制,如圖 2 中虛線框所示;伺服電缸帶動(dòng)夾具向試樣施加載荷,其產(chǎn)生的位移和載荷分別由引伸計(jì)和拉壓傳感器測(cè)量,并把實(shí)時(shí)數(shù)據(jù)傳送給計(jì)算機(jī);計(jì)算機(jī)通過運(yùn)算將設(shè)定位移與實(shí)際位移作比較,并以偏差e和偏差變化率ec作為模糊邏輯的輸入量,經(jīng)模糊化、模糊推理、去模糊化計(jì)算出輸出量 Δkp、Δki、Δkb,并發(fā)送給 PID 控制器,PID 將修正后的位置信息發(fā)送給運(yùn)動(dòng)控制卡,實(shí)現(xiàn)外部位置環(huán)控制。
與基于傳統(tǒng) PID 控制器的疲勞試驗(yàn)機(jī)相比,該系統(tǒng)的區(qū)別在于加入了模糊控制,且每一次疲勞試驗(yàn)均由系統(tǒng)計(jì)算出最佳 PID 參數(shù),規(guī)避了由于對(duì)不同試樣和試驗(yàn)參數(shù)使用相同 PID 參數(shù)而導(dǎo)致超調(diào)量。
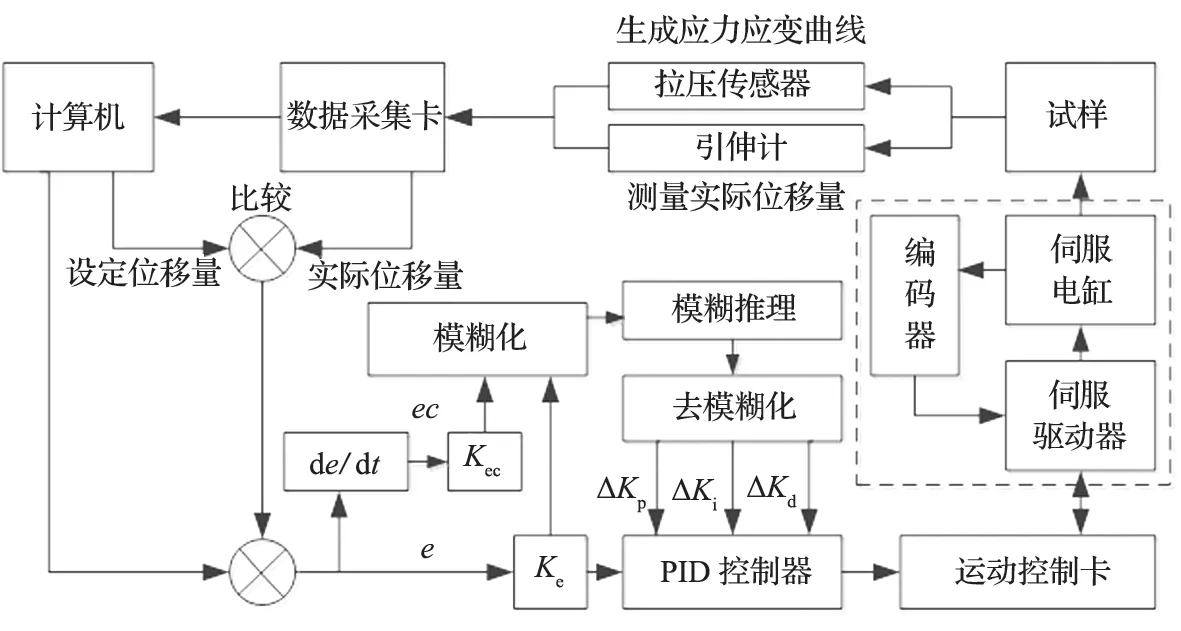
圖2 模糊控制原理Fig.2 Principle of fuzzy control
3 控制系統(tǒng)程序設(shè)計(jì)
3.1 模糊 PID 控制器開發(fā)
要在控制系統(tǒng)中實(shí)現(xiàn)模糊 PID 算法,需要遵從以下步驟[9]:①根據(jù)實(shí)際情況計(jì)算論域;② 確定控制器模糊子集和隸屬度函數(shù)類型;③ 確定模糊控制規(guī)則并制作規(guī)則表。利用論域、模糊子集、隸屬度函數(shù)和模糊控制規(guī)則表,即可依托 LabVIEW 的模糊邏輯和PID 控制器編寫程序,開發(fā)出疲勞試驗(yàn)機(jī)的模糊 PID控制器。
3.2 模糊邏輯的建立
LabVIEW 內(nèi)置了建立模糊控制的工具包,通過模糊系統(tǒng)設(shè)計(jì)器寫入輸入量e、ec和輸出量Δkp、Δki、Δkb,由 if-then 語句編寫模糊規(guī)則庫,模糊控制器編輯完成之后會(huì)生成一個(gè) fs 文件,模糊控制規(guī)則是以文件的形式供模糊邏輯相關(guān)函數(shù)調(diào)用[10]。
根據(jù)輸入輸出變量的論域和隸屬度函數(shù),將其寫入模糊系統(tǒng)設(shè)計(jì)器。如圖 3 所示建立模糊邏輯 fs 文件。模糊子集為:{NB,NM,NS,ZO,PS,PM,PB},其中 NB、PB 隸屬度函數(shù)采用高斯形,其余參數(shù)采用三角形。根據(jù)模糊控制規(guī)則表編寫模糊規(guī)則庫,建立完整的 fs 文件。為方便建立模糊邏輯,變量e、ec、Δkp、Δki、Δkb均采用論域 [-6,6],實(shí)際上變量的基本論域到論域的轉(zhuǎn)換均有不同的放大系數(shù),在模糊化與去模糊化時(shí)已經(jīng)做了相應(yīng)處理。
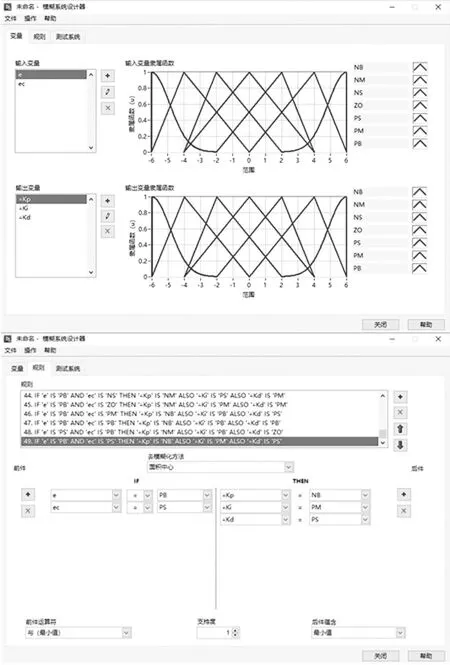
圖3 建立模糊邏輯 fs 文件Fig.3 Establishment of fuzzy logic fs file
3.3 模糊 PID 控制器的實(shí)現(xiàn)
由于疲勞試驗(yàn)是往復(fù)運(yùn)動(dòng)試驗(yàn),對(duì)于試樣的拉伸和壓縮具有對(duì)稱性。控制策略主要討論 1 個(gè)循環(huán)周期里的前半個(gè)周期,模糊 PID 控制流程如圖 4 所示。

圖4 模糊 PID 控制流程Fig.4 Process flow of fuzzy PID control
LabVIEW 中實(shí)現(xiàn)模糊 PID 控制的原理如下:程序開始,進(jìn)入初始化,系統(tǒng)通過預(yù)設(shè)路徑加載模糊規(guī)則,變量的隸屬度函數(shù)和模糊規(guī)則寄存于“FL 加載模糊系統(tǒng) (MIMO)”函數(shù)中,由“FL 獲取規(guī)則文本”函數(shù)讀取規(guī)則表;系統(tǒng)加載用戶輸入的應(yīng)變量,經(jīng)計(jì)算轉(zhuǎn)化為位移,電缸開始運(yùn)動(dòng),試樣發(fā)生位移,即產(chǎn)生偏差e,通過運(yùn)算,計(jì)算出偏差變化率ec;e和ec實(shí)時(shí)輸送給“FL 模糊控制器”,控制器通過規(guī)則找出此時(shí)e和ec對(duì)應(yīng) PID 的 3 個(gè)參數(shù)值,經(jīng)過去模糊化,把 Δkp、Δki、Δkb輸送給 PID 控制器;PID 控制器對(duì)比目標(biāo)位移和實(shí)際位移,并把運(yùn)算出相對(duì)位移,經(jīng)脈沖轉(zhuǎn)化傳送給伺服電動(dòng)機(jī)在線變位模塊;伺服電動(dòng)機(jī)隨即按照新的目標(biāo)位置運(yùn)動(dòng),產(chǎn)生新的e和ec,并送給模糊控制器,經(jīng)過不斷地實(shí)時(shí)檢測(cè)調(diào)整,直到精準(zhǔn)地到達(dá)設(shè)定值。模糊 PID 控制程序如圖 5 所示。
程序中,伺服電缸的控制模塊為 DLL 生成的子程序,在線變位模塊與運(yùn)動(dòng)控制卡通信由內(nèi)環(huán) (速度環(huán))保證其精準(zhǔn)性。數(shù)據(jù)采集卡測(cè)得的拉壓傳感器信號(hào)用作生成應(yīng)力應(yīng)變曲線,測(cè)得引伸計(jì)的實(shí)際位移保存到電子表格文件中,供對(duì)比試驗(yàn)分析研究。
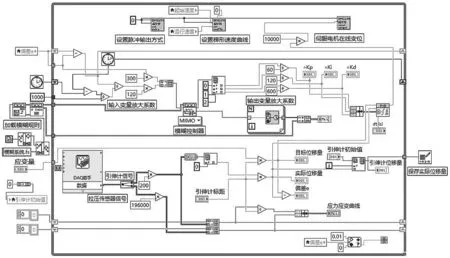
圖5 模糊 PID 控制程序Fig.5 Program of fuzzy PID control
4 試驗(yàn)結(jié)果與分析
按照系統(tǒng)設(shè)計(jì)方案,將機(jī)械結(jié)構(gòu)、運(yùn)動(dòng)控制模塊、數(shù)據(jù)采集模塊和外圍電路等各項(xiàng)硬件進(jìn)行實(shí)物連接。對(duì)伺服驅(qū)動(dòng)器進(jìn)行設(shè)置,控制模式選“位置控制”,指令脈沖輸入模式為“脈沖+方向”,每轉(zhuǎn)脈沖數(shù)為 10 000。測(cè)試伺服電缸、數(shù)據(jù)采集卡、引伸計(jì)、拉壓傳感器等各項(xiàng)硬件設(shè)施功能是否運(yùn)行正常。
試樣選用直徑為 8 mm Q235 碳素鋼,將待測(cè)試樣裝夾到上下夾具中,使伺服電缸推桿主軸與試樣保持良好的同軸度,在試樣中心部位裝夾上引伸計(jì);引伸計(jì)標(biāo)距L=25 mm,應(yīng)變量ε設(shè)定為 0.04,設(shè)置伺服電動(dòng)機(jī)運(yùn)動(dòng)位移ΔL=ε×L=1 mm;設(shè)置數(shù)據(jù)采集卡的采樣率為 1 000。
為了驗(yàn)證模糊 PID 控制算法的控制效果,采用傳統(tǒng) PID 控制算法做對(duì)比試驗(yàn)。控制精度為 0.01 mm,采樣周期T=3 ms,依據(jù)經(jīng)驗(yàn)輸入 PID 控制器的參數(shù)值kp=30,ki=6,kd=3×10-2,試驗(yàn)樣本及加載頻率與模糊 PID 控制算法試驗(yàn)保持一致,加載頻率均設(shè)置為 1。
試驗(yàn)測(cè)量在 4 個(gè)循環(huán)之內(nèi) 2 組試驗(yàn)引伸計(jì)的位移。伺服電缸位移曲線如圖 6 所示。從圖 6 可以看出,傳統(tǒng) PID 控制器在達(dá)到設(shè)定值之后,會(huì)有一定的超調(diào)量;而模糊 PID 控制器的動(dòng)態(tài)響應(yīng)要比傳統(tǒng) PID控制器更加迅速。

圖6 伺服電缸位移曲線Fig.6 Displacement curve of servo cylinder
根據(jù)測(cè)試數(shù)據(jù)針對(duì)伺服電缸的超調(diào)量和動(dòng)態(tài)響應(yīng)時(shí)間進(jìn)行數(shù)據(jù)分析,把數(shù)據(jù)分為拉伸階段和壓縮階段 2 部分,取 4 個(gè)循環(huán)內(nèi)超調(diào)量和動(dòng)態(tài)響應(yīng)時(shí)間的數(shù)據(jù)平均值制作表格。2 種控制方法數(shù)據(jù)對(duì)比如表 1 所列。
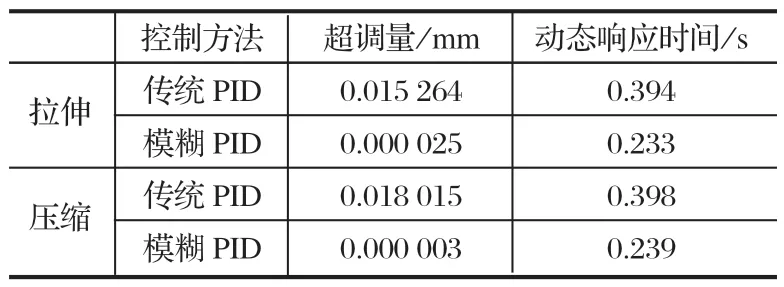
表1 2 種控制方法數(shù)據(jù)對(duì)比Tab.1 Comparison of two control methods in data
由表 1 可知,無論在拉伸階段還是壓縮階段,模糊 PID 控制器的超調(diào)量都要比傳統(tǒng) PID 控制器小很多,且動(dòng)態(tài)響應(yīng)速度相比傳統(tǒng) PID 控制器提升了約16%。
5 結(jié)語
模糊 PID 控制算法具有參數(shù)自整定的功能,通過參數(shù)模糊化、模糊規(guī)則推理、去模糊化等幾個(gè)運(yùn)算環(huán)節(jié),可以依靠計(jì)算得出較為準(zhǔn)確的 PID 參數(shù),避免了傳統(tǒng) PID 控制需要依靠人工經(jīng)驗(yàn)整定 PID 參數(shù)的情況。通過傳統(tǒng) PID 和模糊 PID 的對(duì)比試驗(yàn)可知,模糊PID 控制算法對(duì)于超調(diào)量的抑制效果更佳,且動(dòng)態(tài)響應(yīng)時(shí)間更短。
猜你喜歡
作文周刊·小學(xué)一年級(jí)版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環(huán)球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
運(yùn)動(dòng)(2016年6期)2016-12-01 06:33:42
