2018版C-NCAP及對汽車電子系統的新要求
2020-03-14 08:45:18陳天殷
汽車電器 2020年1期
關鍵詞:系統
陳 康,陳天殷
(美國亞派克機電 (杭州)有限公司,浙江 杭州 310031)
1 2018版新車評價規程C-NCAP概述
自2015版碰撞管理規則實施3年來,中國汽車技術研究中心共測試了上百款車型的乘用車 (即M1類車輛),通過安全測試,促進了中國汽車生產企業不斷提高車輛的安全性。2018年7月中汽中心宣布,未來對新車安全碰撞測試將啟用2018版《中國新車評價規程》——C-NCAP(China New Car Assessment Program)。2015版的碰撞管理規則涵蓋有正面、側面、尾部碰撞試驗的測試規范,而這次新的2018版碰撞管理規則加嚴了側面碰撞嚴苛性的要求,也就是加重了臺車撞擊車輛的質量。同時,還增加了兩項重要的考核指標,主要是在行人保護和AEB緊急制動系統兩方面,并將其列入了主要的考核指標。且明確將裝備車身電子穩定系統ESC列為加分項目。2018版是中國汽車安全標準與國際接軌大跨度的升級。各車企參照新版規則進行車輛的優化調整,自然就推動了中國汽車行業自主品牌挺進先進水平的進程。2018版CNCAP比中國現有強制性標準更嚴格和更全面地要求進行碰撞安全性能測試,評價結果按星級劃分并公開發布。
2018版規則評價體系發生了較大提升,由以前的車輛乘員被動安全保護性能評價,拓展到對車外行人兒童的保護性能和車輛主動預防安全性能,全面覆蓋車內外和主、被動安全要求;首次提出加強側面碰撞、側碰移動壁障的變更測試;還新增了對純電動及混合動力車型的評價,可以說是中國對新車評價史上最嚴格的評價規程。兒童保護主要是指兒童安全座椅的滑車試驗。C-NCAP作為汽車行業安全性要求的督促者,在持續提高行業標準、持續促進企業在提升汽車安全性方面做著不懈的努力。見圖1。

圖1 2018版C-NCAP新規程較原要求有極大提升
圖1、圖2分別表明了側面碰撞時移動碰撞壁障的測試工作狀態。
從圖1的縱覽圖中可以看到AEB是必備項目,而ESC是加分項目。新規程增重側面碰撞壁障至1350kg,見圖2。

圖2 新規程增重側面碰撞壁障至1350kg
圖2 實景中藍色部分即為側面碰撞壁障的頭部——碰撞體。圖3繪出了側面碰撞測試的俯視圖,移動壁障的速度為50km/h。
在1350kg的移動壁障撞擊下,車輛側面碰撞的安全性需仰賴車門的高強度防撞鋼梁迅速吸能,使車輛整體車身結構幾乎保持完整,雖受撞一側的車門嚴重變形,但仍能很好地保證車內乘員的生存空間;立柱在撞擊后變形不明顯,同時車門仍能正常開啟。撞擊過程中,所配備的側氣簾會及時彈出,模擬的假駕駛員頭部觸碰到側氣簾,因而假人的身體各部位沒有受到傷害;同時后排模擬乘員假人同樣保持良好狀態,在安全帶的約束下,其頭部、胸部和腿部沒有受到傷害。
不同的國家,其人口、市場情況以及道路交通狀況各異,各國需根據自身情況選擇合適的試驗規范。C-NCAP正是提升安全性要求,又立足于中國現狀適合中國國情推出的評價體系。中國2018年新版的C-NCAP參照美國國家NHTSA,相比舊版增加了側撞測試,把車身電子穩定系統ESP和自動緊急制動AEB列入新車的標準配置,這也是歐共體、日本等先進工業國家在21世紀10年代初先后都加入了相應規程的。
2018版C-NCAP中新增加的主動安全措施項為AEB(自動緊急制動系統)和ESC(電子穩定控制系統)測試,AEB系統由前視雷達、攝像頭以及光學傳感器等組成,這些信息可以用來啟動制動器,并提供高達1g的制動力,以避免或減輕碰撞。AEB有助于持續監控前方道路,駕駛員沒有對即將產生的碰撞做出反應,車輛將自動制動。AEB在追尾方面可以起到非常重要的作用,包括低速和高速,30~50km/h的速度進行預警,從而實現半制動和緊急情況下的全制動。

圖3 側面碰撞
2 AEB系統的基本原理
2.1 AEB的構建
AEB系統由傳感系統、控制裝置和執行系統3部分組成。如圖4所示。傳感器組成的感知系統由毫米波雷達、激光雷達、單目攝像頭或雙目攝像頭中的一種或幾種的組合。AEB控制裝置可以是一個獨立的ECU,亦可集成在制動系統控制單元中。AEB系統的核心在執行系統的主動制動功能,當前主流的主動制動系統,一類是博世 (Bosch)的iBooster,另一類則是由電子穩定控制 ESC系統升級而來。AEB的功能在于當電子控制單元ECU判斷前方有碰撞危險時,系統控制發動機和制動系統降低車速甚至停車以避免碰撞,減輕傷害。AEB作為一個自主自動的道路車輛安全系統,能夠一直處于隨時待命的警覺狀態,檢測前方道路狀況以及車輛與障礙物的相對速度,不同于人類會感到疲勞或被分心,可針對駕駛者的操作失誤進行有效彌補。

圖4 AEB系統的構建
AEB的研發進展與自動駕駛技術的發展相互促進,其意義是里程碑性質的,因為它標志著AV(自動駕駛車輛)所依托的制動執行系統在硬件上得以充分實現。自動駕駛對執行系統的要求是能夠通過電信號精準、快速地控制車輛各類的運動。
以Volvo為例,AEB幾乎是它全系列的標配。其安全制動用途的傳感器包括位于前擋風玻璃后的攝像頭和激光雷達、位于格柵后的毫米波雷達。毫米波雷達用于探測中長距離的障礙物,激光雷達探測前方10m以內的汽車和其他物體;而攝像頭則是用來判斷物體的類型。它能實現的功能有:與前車防追尾碰撞、前方身高80cm以上行人的防碰撞、防止同向行駛自行車的碰撞。其AEB系統性能:車速小于等于50km/h時啟用,車速在15~30km/h能減輕碰撞;車速相對差值在4~15km/h及以下可完全避免碰撞。
AEB正常工作需要的硬件配置有:服從ECU指令的制動系統,電子制動系統EBS、車身穩定系統ESP、機械制動器和自動變速器都是必不可少的。電子制動系統EBS是AEB能發揮應用的一項重要硬件基礎。EBS是電控制動系統,踩制動踏板也只是給EBS控制單元一個信號而已,再由EBS模塊控制通過油路油壓給制動分泵推動制動系統。正是因為電控的原理,AEB在需要緊急制動的時候才能調用制動系統。若是傳統的機械式制動系統,AEB發出要制動的指令,制動卻不受指令控制,那緊急制動的功能也就無濟于事了。整車電控化是車輛邁向自動駕駛必走的路。
圖5為AEB系統結構原理圖,圖6為AEB系統各部件組成。
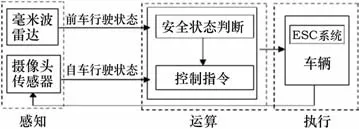
圖5 AEB系統結構原理圖

圖6 AEB系統各部件組成
AEB是分段工作的,由攝像頭或雷達檢測和識別前方車輛,一旦有碰撞可能的風險情況,先用聲音和警示燈提醒駕駛者進行制動操作以回避碰撞。若駕駛者仍無制動操作,系統判斷已無法避免追尾碰撞,就會采取自動制動措施來減輕或避免碰撞。同時,AEB系統還包括動態制動支持,當駕駛者踩下制動踏板的力量不足以避免即將到來的碰撞時,就能為其瞬間補充足夠的制動力。圖7為雷達傳感器和攝像頭雙重工作的示意圖。

圖7 雷達傳感器和攝像頭雙重工作的示意圖
2.2 AEB的核心技術與運作
圖8 顯示行進中的車輛為規避碰撞風險,時刻有傳感器、雷達探測周圍與障礙物的間距和相對速率。

圖8 車輛四周皆有測距測速的傳感器在工作著
AEB的工作,由數據線傳遞至中央處理器。CPU對數據分析處理,根據車輛當前位置、目標位置及周圍環境參數能作出自主制動策略,并轉換成電信號;車輛策略控制執行系統在接受電信號后,指示車輛緊急制動或轉向規避行駛 (方向、角度及動力支援)等諸方面的操控,并有充分體現駕駛員操作特點的汽車主動避撞魯棒控制器。
AEB主動規避碰撞系統的重點在于安全距離模型的設計。各大廠商皆有自己的模型,漏報率、誤報率各有差異,現有模型算法都有改進空間。其中的原因在于只有當模型算法充分符合駕駛員避撞的操作特性,方可提高系統的接受度。安全距離模型不僅依賴于實時的相對運動關系,還須準確獲知當前自身車輛參數與外界環境信息,關鍵在于雷達目標檢測算法的實時性和魯棒性,而且還得充分考慮到路況條件以及車輛制動特性對系統性能的影響。
所謂“魯棒性” (Robustness)指控制系統在一定 (結構,大小)的參數擾動下,維持其它某些性能穩定的特性,也就是系統的健壯性,表征在異常和危險情況下系統生存能力的關鍵。魯棒控制方法適用于穩定性和可靠性作為首要目標的應用,同時過程的動態特性已知,且不確定因素的變化范圍可以預估。魯棒性表征控制系統對特性及參數擾動的不敏感性。魯棒性強,系統在異常、危險和誤操作情況下穩定性好。AEB的動態檢測系統和模糊補償系統使可靠地運行得以保障。
避免碰撞而采取緊急制動,不同駕駛員從判斷到做出對策有著差異性。駕駛員行為仿真這一類非線性控制函數模糊控制系統能給出一種非模型化的估計。方案對傳感器與執行器的工作精度要求甚高,較難補償系統運行的動態誤差,于是也會轉為借助于依托熟練駕駛員經驗構筑的模糊控制技術。
對于有碰撞風險的車輛實施AEB,引入碰撞時間TTC(Time To Collision)這一參數,或者用碰撞時間倒數TTC-1作為評價指標,建立分級警示與主動制動的安全距離模型。
當自車與前車的速度分別為VC和VP,兩車間距離為R,則有:

依據NHTSA (Nation Highway Traffic Safety Administration美國國家公路交通安全管理局)的統計學數據,認為98%駕駛員制動減速度a不會超過-2.17m/s2,減速度達到-3~-4m/s2時會引起人體不適。加速度a=-2.17m/s2時對應的TTC-1為0.11;而a=-3~-4m/s2時,對應的TTC-1為0.7~1.2。為防止過早警示分散駕者注意力甚至產生慌亂,也需避免過晚介入貽誤時機,不能給駕者足夠反應時間,故將危險情況依次分為安全、較危險、很危險和極端危險4個級別來區別對待,見表1。
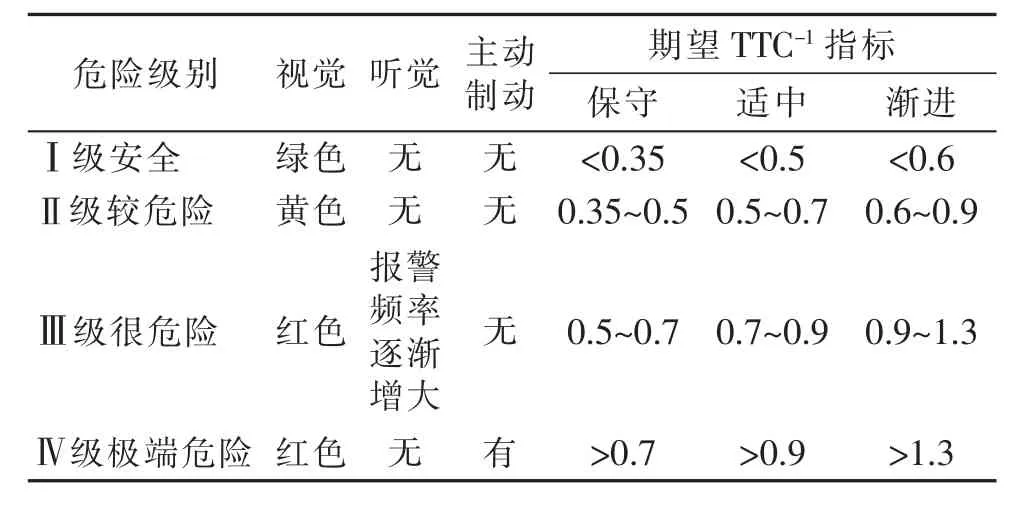
表1 4級制的分級聲光警示與主動制動
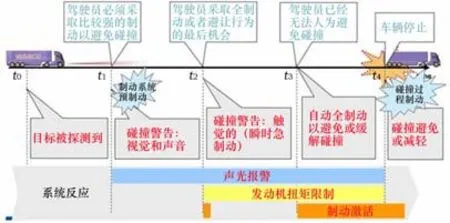
圖10 從t0~t4時間段AEB的工作過程
規避碰撞緊急制動系統的雷達處理算法,即AEB的檢測控制流程,如圖11所示。
表1中Ⅱ級以后為警示安全距離,而Ⅳ級以后為制動安全距離。制動安全距離由兩車在系統延時時間內經過的相關距離和兩車以相同最大減速度制動的距離差兩者所組成。系統延時t1由雷達算法延時與執行機構滯后兩部分組成。t1若取值過大,系統會頻繁制動導致車身不斷俯仰;反之則無法及時實現有效制動。
基于規避碰撞自動緊急制動系統的軟硬件平臺采用目標檢測算法,既具備碰撞時間規劃的精確性,又兼容了經驗知識模糊控制的魯棒性,是當前業界深入探研的方案。碰撞時間的計算見圖9。
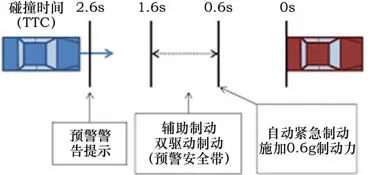
圖9 某型奔馳的碰撞時間的計算
當偵測到有碰撞風險后ECU會指令自動緊急制動。目前AEB還沒有一個業界統一標準,各品牌的命名也各不相同,如沃爾沃名為城市安全系統、奔馳名為Pre-safe。但現階段這些自動緊急制動系統的工作時速范圍普遍在30km/h以下。圖10為AEB對一個動態的工作目標的工作過程。即前方車輛在減速,但沒有停下來,還在以某一速度前行。AEB檢測到該種情況,其判斷依據是跟車距離。先用聲音提醒駕駛員,發動機降低扭矩輸出,制動系統處于準備狀態,若駕駛員沒有干預行為,根據距離還在繼續變近,此刻系統就會預制動,施加一部分制動力減速,距離還在變近,碰撞風險加大的時候才會使出最大制動力緊急制動。車距變大之后就會松開制動。故這種狀態就存在剎停和不剎停兩種情況,主要取決于前車的運動速度。
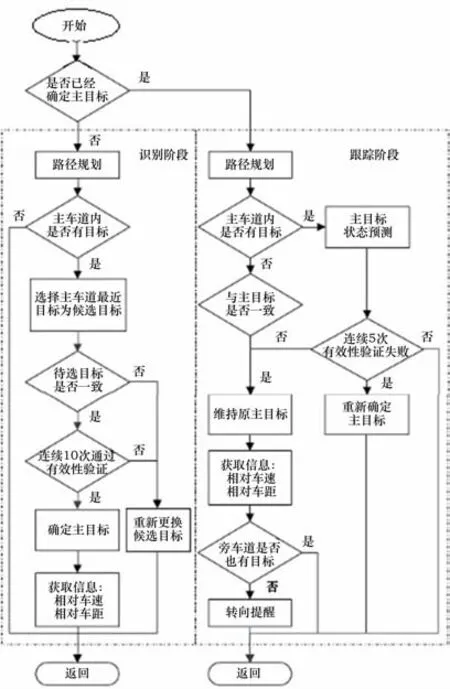
圖11 AEB系統障礙檢測控制流程圖
ESC系統能實現主動制動,因而ESC可作為自動緊急制動系統的執行器。即當險情出現時,即使駕駛員沒有踩踏制動踏板,ESC中的馬達工作帶動泵體工作,促使制動回路油壓增高,車輛制動系開始工作。
有實驗表明,當不踩油門踏板,節氣門開度為0,擋位為D,軟件向CAN發減速度指令,設置車輛的目標減速度由0m/s2到-3m/s2,減速度的變化率為-3m/s2。而該ESC最大能提供-15m/s2的減速度變化率,目標減速度和實際的減速度延時時間為160ms,此即為車輛制動系間隙協調時間t2。車輛的減速度從0m/s2到-3m/s2經過時間為1s。車輛制動力增長時間t3和減速度變化率及減速度值大小有關。制動力增長時間最短只需530ms。
實際上該過程利用各種傳感器傳輸來的數據信息,運用路徑規劃、行駛距離和行駛速度的融合算法,逐一控制車輛制動程序到達預定的關鍵點。
經驗告訴我們,常常是當道路情況良好,車輛不算特別多的時候,人容易懈怠駕駛,分心走神不集中精神操控車輛,危險就容易出現。這時AEB緊急制動系統就能發揮避免碰撞減輕傷害作用,甚至救人一命。
當然不同的車型隨款式的差異有不同的設定,當前AEB工作速度的范圍大致在30~50km/h。必須注意,因AEB僅在車輛遇到突發危險情況時能自主產生制動效果,讓車輛減速,但具備該功能,并非能實現將車輛在接觸到前車、前人或前物的瞬間完全剎停。它是提高行車安全性的一項防撞技術,預防減輕車禍的措施,但并不是保證不再會發生碰撞事故、可以過度依賴、任何車況下都萬無一失的“安全全保障”。如前面2.1章節介紹Volvo時已指出,只有當車速差在4~15km/h以下,才可完全避免碰撞。奔馳Pre-Safe預防安全系統有較卓越的表現,碰撞前2.6s開始提示,碰撞前1.6s時開始輔助制動,碰撞前0.6s開始用最大的力度制動,見圖12。系統性能:時速50km/h以內完全避免追尾碰撞;時速50~72km/h降低碰撞程度。
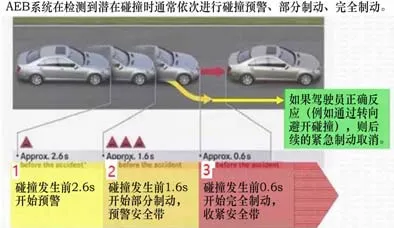
圖12 奔馳Pre-Safe預防安全系統典型應用場景
2.3 鞭打測試
圖13 為鞭打測試的實況。鞭打測試實際是汽車碰撞引起對人頸部傷害的測試。
鞭打測試是將試驗車輛駕駛員側座椅及約束系統仿照原車結構,固定安裝在可移動滑車之上,滑車以速度變化模擬后碰撞過程。座椅上放置著一系著安全帶的模擬假人,通過測量后碰撞過程中模擬假人頸部受到的傷害情況,用以評價車輛座椅的頭枕對乘員頸部保護效果環節。此外,2015版的鞭打速度為16km/h,新版速度增加至20km/h。

圖13 鞭打測試的實況
近年,從國內外媒體針對各大整車企業AEB系統的測試結果可以看出,AEB的技術水平和實際反應速度皆有顯著改進和提升。當前,AEB重要研發方向是低速 (30km/h)狀態下,AEB系統對前方車輛 (尤其是行人)的識別能力以及車輛制動能力的提升,考驗車輛是否能在障礙物前自動剎停。受中國安全產業協會委托,中國起草的《汽車自動防撞技術標準》即將出臺,據透露該標準部分要求將高于歐盟。
3 新版規則EV/HEV評價方案與檢測綱要
新版規則增加的純電動汽車/混合動力汽車 (EV/HEV)的測試項目包括觸電保護性能、電壓安全、電能安全、物理防護、電力系統負載端絕緣電阻、電解液泄漏、REESS安全評價 (REESS的位置、REESS起火、爆炸)、高壓自動斷開裝置。
目前已有多個先進國家出臺了禁售燃油車的時間表,發展新能源車是大勢所趨。中國已躍居世界第一大的汽車消費國,2017年汽車銷售達2887.89萬輛,但該行業中國技術先進的領域卻乏善可陳。
新版規程增設EV/HEV安全項目,雖內含眾多電子系統控制內容,但皆與該兩系列汽車相應的強制性標準相對應。如圖14、圖15所示。

圖14 EV/HEV安全評價方案
4 結語
考核車輛行駛安全性的新車測評體系不僅是對車輛產品的考核,更是引導行業技術發展的有效手段。AEB、ESC已在2018版的新車評價規范中成為標準配置,未來對AEB、ESC系統的要求也會與時俱進,要求探測范圍更廣,識別更精確,干預更靈活,這就需要更高性能的傳感器、算法和制動系統。

圖15 EV/HEV安全評價檢測綱要
隨著人類社會的進步,AEB、ESC系統商品化推廣市場、普及應用是必然的方向,對汽車制造商和零部件供應商都是機遇,也將會產生極佳的經濟效益和社會效益。低成本高性能的AEB、ESC系統擁有十分廣闊的市場前景。
相比E-NCAP以及IIHS的翻滾和25%小重疊碰撞等項目,是C-NCAP未來需要向其學習和改善之處。主動安全裝備中的車道偏離系統LDW、盲點探測系統BSD也都是需要繼續加強研究的。安全無止境,希望看到下一版C-NCAP能處于全球安全的領先地位,讓自主品牌在安全方面具有強大的優勢。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
