電控空氣懸架車輛自適應前照燈控制策略研究
2020-03-13 20:58:00賈兆功滕利衛孫富權嚴天一
青島大學學報(工程技術版) 2020年1期
關鍵詞:控制策略
賈兆功 滕利衛 孫富權 嚴天一
摘要:?為有效提高前照燈夜間照明效果,本文在充分考慮國標GB7258《機動車運行安全技術條件》基礎上,根據車身高度、車速等信號變化,提出一種自適應前照燈系統(adaptive?frontlight?system,AFS)的新型前照燈垂向控制策略,以合理調節其夜間照射角度。同時,采用Matlab/Simulink和Stateflow軟件,建立前照燈垂向控制策略模型,并對車輛在加速工況和減速工況條件下進行仿真分析。仿真結果表明,在車輛高度變化及車輛加速情況下,所提出的控制策略模型可有效調節前照燈照射角度,提高駕乘安全性;在車輛高度變化及減速條件下,所提出的控制策略模型亦可實時有效地調節前照燈照射角度,改善駕乘人員夜間行駛安全性。該研究可有效提高電控空氣懸架系統車輛夜間行車安全性。
關鍵詞:?電控空氣懸架系統;?自適應前照燈系統;?夜間行車安全性;?照射角度;?控制策略
中圖分類號:?U463.65+1?文獻標識碼:?A
收稿日期:?2019-10-03;?修回日期:?2019-12-21
基金項目:?山東省自然科學基金資助項目(ZR2016EEM49);國家自然科學基金資助項目(50905090)
作者簡介:?賈兆功(1993-),男,碩士研究生,主要研究方向為汽車動態仿真與控制。
通信作者:?嚴天一(1970-),男,工學博士,教授,主要研究方向為車輛系統動力學及其控制策略。Email:?yan_7012@126.com
傳統汽車照明系統主要由前照燈系統、信號照明系統、車內照明系統三大部分組成。燈光作為夜間行車最有效的信息載體,能夠使駕乘人員清楚掌握交通狀況,據此判斷可能存在的各種危險,并及時采取相應規避措施。由于傳統前照燈系統僅具有兩種固定的遠光燈照明與近光燈照明模式,無法根據各種行駛工況自動調整前照燈照射角度,因此難以滿足現代高端車輛高速夜間行駛安全要求。AFS是一種智能控制系統,其能夠根據駕駛操作、行駛工況、路面狀況等信息,自動調節前照燈照射角度,以有效提升夜間行車安全性和駕乘舒適性[1-2]。S.?Grazioli等人[3]通過建立兩自由度車輛模型、前光軸水平偏轉模型及步進電機模型,提出了基于增量式比例積分微分(proportionalintegralderivative,PID)控制算法的自適應前照燈系統,并進行了相關仿真研究;M.?Giradkar等人[4]在建立車輛二自由度轉彎模型、橫向作用模型的基礎上,開發了彎道自適應前照燈控制算法;武漢等人[5]提出以數字微鏡元件為核心,采用第二導光管、可收集未利用光能的自適應前照燈光學方案,并利用專業光學軟件對整個系統進行仿真研究;戎輝等人[6]根據自適應前照燈系統的功能需求,建立了車輛參數與燈光軸沿水平和垂直兩個方向的偏轉角度之間的理論模型及自適應前照燈系統的運動學模型,并開展了相關試驗驗證;李禮夫等人[7]構建了自適應前照燈的夜間轉彎模式的數學模型,并仿真驗證了該模型的正確性。電控空氣懸架系統是由電子控制單元、高度傳感器、壓力傳感器、車速傳感器、電動氣泵、組合電磁閥、空氣彈簧、儲氣筒等部件組成,可有效提高平順性、燃油經濟性及通過性等[8]。電控空氣懸架系統可根據車速等信號對各空氣彈簧進行充氣和放氣,從而調節車身高度,但也造成夜間行車時前照燈照射角度發生明顯變化,若不對其照射角度進行合理調整,必將降低夜間行車安全性。目前,國內在電控空氣懸架車輛的AFS系統控制策略研究尚處于起步階段,亟待深入研究。基于此,本文主要對電控空氣懸架車輛自適應前照燈控制策略進行研究,分析電控空氣懸架系統對前照燈照射角度的影響,提出并仿真驗證一種新型AFS控制策略,可使夜間前照燈照射角度調節實現最優狀態。該研究為駕乘人員夜間駕駛車輛提供了最佳的照明效果及行車安全性。
1?AFS系統組成及其工作原理
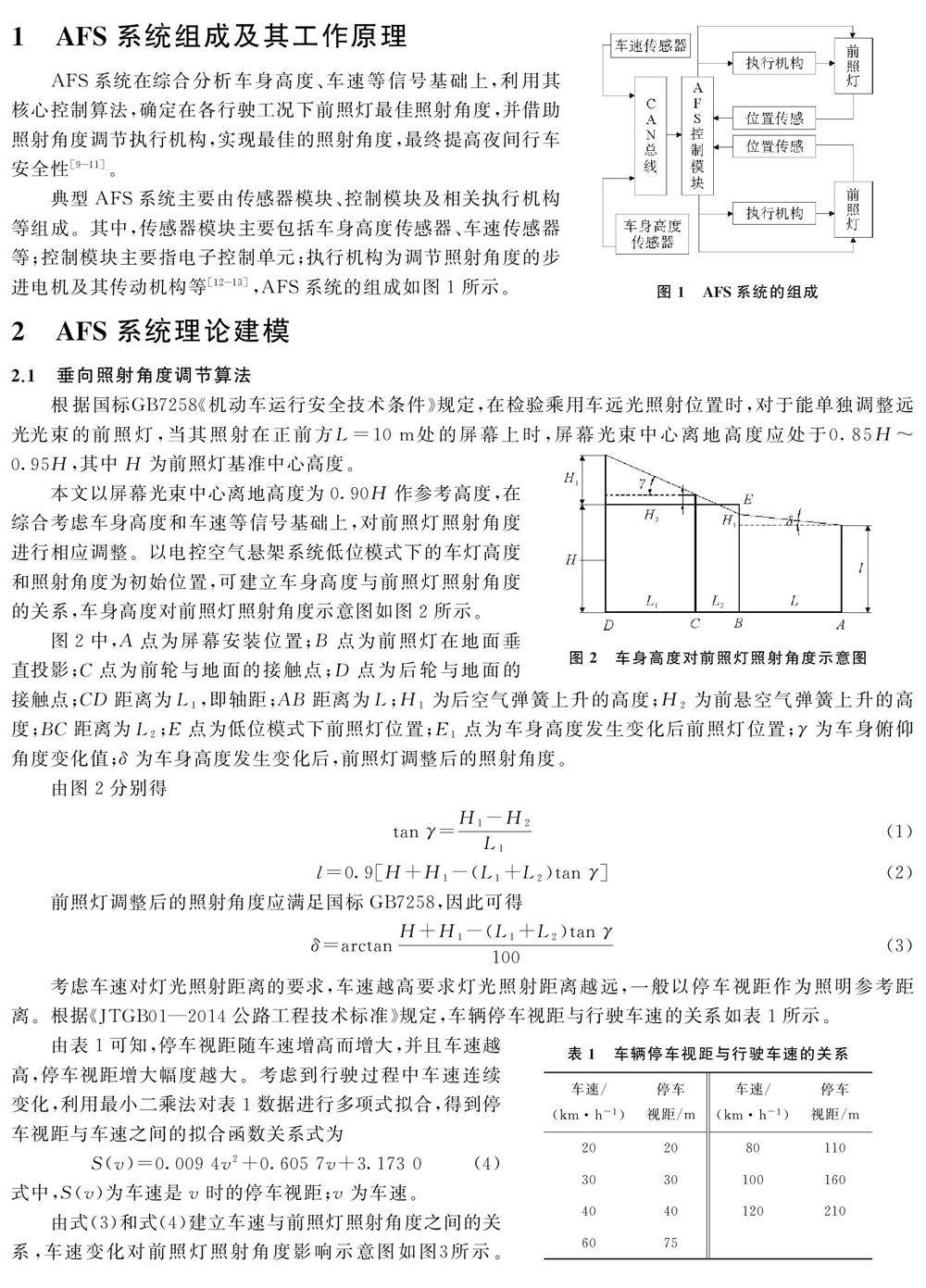
AFS系統在綜合分析車身高度、車速等信號基礎上,利用其核心控制算法,確定在各行駛工況下前照燈最佳照射角度,并借助照射角度調節執行機構,實現最佳的照射角度,最終提高夜間行車安全性[9-11]。
典型AFS系統主要由傳感器模塊、控制模塊及相關執行機構等組成。其中,傳感器模塊主要包括車身高度傳感器、車速傳感器等;控制模塊主要指電子控制單元;執行機構為調節照射角度的步進電機及其傳動機構等[12-13],AFS系統的組成如圖1所示。
2?AFS系統理論建模
2.1?垂向照射角度調節算法
根據國標GB7258《機動車運行安全技術條件》規定,在檢驗乘用車遠光照射位置時,對于能單獨調整遠光光束的前照燈,當其照射在正前方L=10?m處的屏幕上時,屏幕光束中心離地高度應處于0.85H~
0.95H,其中H為前照燈基準中心高度。
本文以屏幕光束中心離地高度為0.90H作參考高度,在綜合考慮車身高度和車速等信號基礎上,對前照燈照射角度進行相應調整。以電控空氣懸架系統低位模式下的車燈高度和照射角度為初始位置,可建立車身高度與前照燈照射角度的關系,車身高度對前照燈照射角度示意圖如圖2所示。
圖2中,A點為屏幕安裝位置;B點為前照燈在地面垂直投影;C點為前輪與地面的接觸點;D點為后輪與地面的接觸點;CD距離為L1,即軸距;AB距離為L;H1為后空氣彈簧上升的高度;H2為前懸空氣彈簧上升的高度;BC距離為L2;E點為低位模式下前照燈位置;E1點為車身高度發生變化后前照燈位置;γ為車身俯仰角度變化值;δ為車身高度發生變化后,前照燈調整后的照射角度。
由圖2分別得
tan?γ=H1-H2L1(1)
l=0.9[H+H1-(L1+L2)tan?γ](2)
前照燈調整后的照射角度應滿足國標GB7258,因此可得
δ=arctanH+H1-(L1+L2)tan?γ100(3)
考慮車速對燈光照射距離的要求,車速越高要求燈光照射距離越遠,一般以停車視距作為照明參考距離。根據《JTGB01—2014公路工程技術標準》規定,車輛停車視距與行駛車速的關系如表1所示。
由表1可知,停車視距隨車速增高而增大,并且車速越高,停車視距增大幅度越大。考慮到行駛過程中車速連續變化,利用最小二乘法對表1數據進行多項式擬合,得到停車視距與車速之間的擬合函數關系式為
S(v)=0.009?4v2+0.605?7v+3.173?0(4)
式中,S(v)為車速是v時的停車視距;v為車速。
由式(3)和式(4)建立車速與前照燈照射角度之間的關系,車速變化對前照燈照射角度影響示意圖如圖3所示。
由于車身高度變化,適當調節后,前照燈照射到路面上的位置為F點;如果車速也發生變化,經再調節后,前照燈照射到路面上的位置為G點;車身高度變化后,車速再發生變化,導致前照燈附加調節的照射角度為ζ;綜合考慮車身高度變化與車速對停車視距的要求,θ為前照燈調節后的照射角度。
根據圖3,空氣彈簧調節后停車視距BF=100?m,取車身高度變化所引起前照燈照射距離與停車視距相等時,由式(4)可得v≈75?km/h。故當v<75?km/h時,S(v)<100?m,停車視距小于車身高度變化后前照燈照射的距離,此時無須再因車速變化調整前照燈的照射角度;當v>75?km/h時,S(v)>100?m,此時停車視距大于車身高度變化后的前照燈照射的距離,因此前照燈照射角需要再調整ζ,以滿足停車視距的要求。需要向上調整的角度大小為ζ,結合圖3可得
ζ=δ-arctanH+H1-(L1+L2)tan?γS(v)(5)
將式(4)代入式(5)可得
ζ=δ-arctanH+H1-(L1+L2)tan?γ0.009?4v2+0.605?7v+3.173?0(6)
綜合考慮車身高度以及車速對前照燈照射角度的影響,則
θ=δ-ζ=arctanH+H1-(L1+L2)tan?γ0.009?4v2+0.605?7v+3.173?0(7)
2.2?執行機構建模
本文所研究的AFS執行機構以兩相混合式步進電機驅動,該步進電機具有運行穩定、可實現高精度定位控制的特點,廣泛用于高精度控制領域[14]。其數學模型主要包括電壓方程、電磁轉矩方程和機械運動方程[15-16]。
兩相電壓方程分別為
uA=RiA+LdiAdt+eA(8)
uB=RiB+LdiBdt+eB(9)
式中,uA與uB分別為A相繞組與B相繞組的電壓;R為定子繞組阻值;iA與iB分別為A相和B相繞組的電流;L為定子繞組自感系數;eA與eB分別表示A相和B相定子線圈反電動勢,其表達式分別為
eA=-PΨmsin(Pθm)dθmdt(10)
eB=-PΨmsinPθm-π2dθmdt(11)
式中,P為磁極對數;Ψm為最大磁鏈;θm為轉子角位移。
電磁轉矩方程為
Te=-PΨmsin(Pθm)-PΨmsinPθm-π2-Tdmsin(2Pθm)(12)
式中,Te為電磁轉矩;Tdm為定位力矩。
機械運動方程為
Te=Jdωdt+Bω+Ti(13)
ω=dθmdt(14)
式中,J為轉子轉動慣量;ω為轉子角速度;Β為粘滯阻尼系數;Ti為負載轉矩。
3?控制策略模型
利用Simulink與Stateflow搭建控制策略模型,前照燈照射角度控制策略模型如圖4所示,該模型包含電控空氣懸架系統控制策略模塊、角度計算模塊與步進電機控制模塊。
電控空氣懸架系統控制策略模塊包括空氣懸架高度控制策略、組合閥與氣泵模型。電控空氣懸架高度控制策略模型利用Stateflow中提供的狀態、轉移、節點組件構建空氣懸架高度、車速實時監測的自動控制模塊,根據當前車速通過組合閥與氣泵對空氣懸架進行充、放氣,調節懸架高度。本文所提出的控制策略模型分為3種模式:當車速30?km/h
根據所建立的車身高度及車速對前照燈照射角度影響的數學方程,搭建Simulink模型,前照燈照射角度計算模型如圖6所示。在空氣懸架模式變換過程中,將圖4輸出的空氣懸架高度值以及車速值作為輸入信號,可計算得出前照燈照射角度期望值。其中,位置反饋模型簡化了步進電機減速器及相關執行機構,由步進電機角位移等效計算出前照燈照射角度變化值,進而得到前照燈實際位置,并由前照燈實際角度與期望角度產生使步進電機動作的前照燈照射角度調整信號。
根據所建立的相關步進電機的理論方程,搭建步進電機仿真模型及其驅動器模型,步進電機控制模型如圖7所示。將圖6輸出的前照燈照射角度調整信號輸入至圖7所示的步進電機控制模型中,并將前照燈照射角度調整到期望值。
4?仿真與分析
假設車輛在平直的B級路面上行駛,僅考慮懸架高度和車速變化對前照燈照射角度的影響,對前照燈照射角度進行垂向調整。其中,該車輛主要整車參數為:L1=2.900?m,L2=1.124?m,L=10.000?m,H=0.800?m。
電控空氣懸架高度控制模式包括高位、中位和低位等模式,以低位模式為參考位置,中位模式車身高度距參考位置為60?mm;高位模式車身高度距參考位置為120?mm。各模式的調節誤差為±5?mm。
利用Simulink?Design?Verifier自動生成測試用例,檢查模型的邏輯設計及分支結構,開展結構型測試,并生成覆蓋度分析報告,測試用例的覆蓋度分析如圖8所示,由圖8可以看出,所建立的控制策略模型在靜態驗證中不存在模塊冗余、設計錯誤等缺陷,模型穩健性較好[17-18]。為進一步驗證控制策略的正確性及模型動態仿真性能,須對模型進行基于功能的測試[19-20]。
4.1?車輛加速工況時仿真
控制策略模型的測試用例如表2所示,由表2可知,執行條件為Mode=1時,控制策略模型處于使能狀態,在0~20?s內,車輛處于高位模式,為Highmode狀態,車身高度距參考位置的距離為120?mm;在20~70?s內,空氣彈簧經過放氣后,車輛由高位模式進入中位模式,并以Mediummode表示,車身高度降低至60?mm;在70~100?s內,空氣彈簧再進一步放氣后,車輛由中位模式進入低位模式,表示為Lowmode狀態,車身高度降低至參考位置。
空氣彈簧高度變化如圖9所示。由圖9可以看出,當t=20?s時,空氣懸架系統進入模式切換狀態,至t=25?s時,空氣彈簧高度下降60?mm,空氣懸架系統由高位模式切換為中位模式;在t=70?s時,空氣懸架系統再次進入模式切換狀態,至t=75?s時,空氣彈簧高度再次降低60?mm,空氣懸架系統由中位模式切換為低位模式,仿真結果符合預期要求。
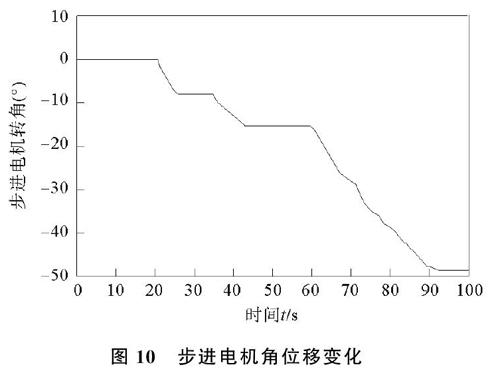
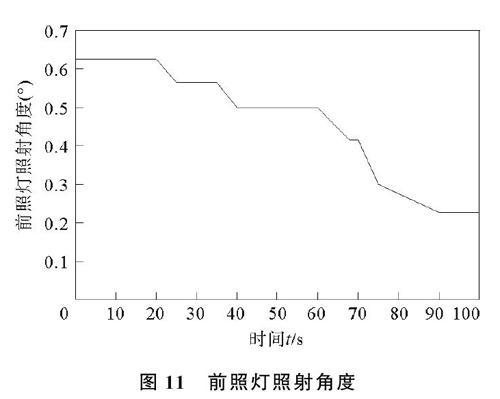
因為上述空氣懸架高度變化,在前照燈照射角度計算模型中,產生步進電機轉向控制信號與脈沖信號,將這兩種信號輸入到步進電機控制器模型中,控制步進電機執行相應動作,步進電機角位移變化如圖10所示。經減速器及其他執行機構,最終使前照燈的照射角度得到合理調整,前照燈照射角度圖如圖11所示。
由表2、圖9和圖11可知,在0~20?s內,車身高度不變,車速較低不會對前照燈照射角度產生影響;在20~25?s,車身高度降低,故前照燈照射角度適當變小,但車速較低暫未對前照燈的角度產生影響;在25~35?s內,車身高度不變,車速仍未對前照燈照射角度產生影響;在35~40?s內,車速對前照燈照射角度開始產生影響,為使照射距離達到停車視距要求,前照燈照射角度適當變小,停車視距增大;在40~100?s內,角度的調整由車速和車身高度共同引起。因此,在表2所示的測試條件下,步進電機角位移變化(圖10)與前照燈照射角度的變化(圖11)符合預期要求,在車輛高度變化及車輛加速情況下,所提出的控制策略模型可有效調節前照燈照射角度,提高駕乘安全性。
4.2?車輛減速工況時仿真
控制策略模型的測試用例如表3所示。由表3可以看出,在0~30?s內,車輛處于低位模式;在30~80?s內,由低位模式轉換至中位模式,空氣彈簧經過充氣后,車身高度上升60?mm;在80~100?s內,空氣彈簧再次經過充氣后,車身高度再次提升60?mm,由中位模式進入高位模式。
空氣彈簧高度變化圖如圖12所示,由圖12可以看出,仿真結果符合預期要求。
在表3所示測試條件下,前照燈照射角度計算模型可產生步進電機控制信號,并輸入到步進電機控制器模型中,步進電機在脈沖信號及轉向控制信號控制下執行相應動作,步進電機角位移圖如圖13所示,前照燈照射角度得到有效調整,前照燈照射角度圖如圖14所示。
由表3、圖12及圖14可知,在0~60?s內,車身高度和車速變化共同引起前照燈角度調整;在60~65?s內,雖然車身高度未發生變化,但車速降低,導致停車視距亦隨之減小,故前照燈照射角度適當增加;在65~80?s內,車身高度保持穩定,車速變化已無法對前照燈照射角度產生影響,故前照燈照射角度不變;在80~85?s內,隨著車身高度進一步變化,前照燈照射角度又適當的增加;在85~100?s內,車身高度保持不變,但車速較低,前照燈照射角度不變。因此,在表3所示的測試條件下,步進電機角位移變化(圖13)與前照燈照射角度變化(圖14)符合預期要求,在車輛高度變化及減速條件下,所提出的控制策略模型可實時有效地調節前照燈照射角度,改善駕乘人員夜間行駛安全性。
5?結束語
本文基于Simulink和Stateflow軟件,建立了帶有電控空氣懸架系統的車輛自適應前照燈垂向控制策略模型,仿真驗證了在耦合條件及各自獨立條件下車身高度與車速的變化,所提出的控制策略對改善前照燈垂向照射角度是有效的。通過空氣彈簧高度變化圖、步進電機角位移圖及對應的前照燈照射角度圖可以看出,所提出的控制策略實時性及跟隨性較好,可為改善空氣懸架系統車輛自適應前照燈系統控制策略提供一定的參考依據。由于本文所提出的控制策略尚未涉及空氣懸架車輛前照燈水平照射角度自適應調節的相關研究,因此前照燈水平照射角度調節控制策略及水平照射角度調節與垂向照射角度調節耦合條件下的控制策略研究是接下來的研究方向。
參考文獻:
[1]?PenaGarcia?A,?Pena?P,?Espin?A,?et?al.?Impact?of?adaptive?frontlighting?systems?(AFS)?on?road?safety:?Evidences?and?open?points[J].?Safety?Science,?2012,?50(4):?945-949.
[2]?杜小芳,?趙永浩,?徐文婷,?等.?汽車自適應前照燈系統AFS的控制策略研究[J].?武漢理工大學學報:?交通科學與工程版,?2016,?40(4):?646-650.
[3]?Grazioli?S,?Minisini?R,?Franzosi?L,?et?al.?Modeling?and?simulation?on?auto?adaptive?frontlight?system[J].?Computer?Simulation,?2011,?28(10):?349-353.
[4]?Giradkar?M,?Khanapurkar?M.?Design?and?implementation?of?adaptive?front?light?system?of?vehicle?using?FPGA?based?LIN?controller[C]∥International?Conference?on?Emerging?Trends?in?Engineering?and?Technology.?Port?Louis:?IEEE,?2011:?258-261.
[5]?武漢,?朱向冰,?朱騫,?等.?數字微鏡元件式自適應前照燈光學設計[J].?紅外與激光工程,?2013,?42(4):?955-959.
[6]?戎輝,?龔進峰,?曹健.?自適應前照燈運動學建模及系統開發[J].?汽車工程,?2008,?30(12):?1079-1082.
[7]?李禮夫,?鄧前.?汽車自適應前照燈轉彎模式的數學模型研究[J].?汽車技術,?2010(10):?43-46.
[8]?嚴天一,?劉欣強,?張魯鄒,?等.?基于代碼生成的電控空氣懸架系統電子控制單元[J].?農業機械學報,?2014,?45(9):?14-19.
[9]?楊明俊.?面向動態配光光型的汽車AFS前照燈轉角控制方法研究[D].?廣州:?華南理工大學,?2015.
[10]?王洪佩,?高松,?宋炳雨,?等.?汽車自適應前照燈系統建模與仿真[J].?計算機仿真,?2011,?28(10):?349-353.
[11]?李祥兵.?汽車自適應前大燈系統仿真實驗平臺研究[D].?武漢:?武漢理工大學,?2010.
[12]?錢向明.?車用自適應前照燈系統設計與研究[J].?機電工程,?2010,?27(7):?104-107.
[13]?張曉鳴.?汽車自適應前照燈系統的設計與實現[D].?哈爾濱:?哈爾濱工程大學,?2014.
[14]?鄧前.?基于主動安全的汽車自適應前照燈控制方法研究[D].?廣州:?華南理工大學,?2011.
[15]?周一飛.?基于Simulink的步進電機控制系統仿真[D].?成都:?西南交通大學,?2014.
[16]?余馳,?李健仁,?張剛峰.?兩相混合式步進電機建模與仿真[J].?兵工自動化,?2016,?35(2):?48-51.
[17]?趙鶴,?高婉玲.?基于模型的軟件測試用例生成方法比較研究[J].?現代計算機(專業版),?2017,?4(5):?20-26.
[18]?謝曉東.?基于模型比較的軟件測試用例生成方法研究[D].?武漢:?華中科技大學,?2007.
[19]?蔡峰,?周毅,?陳陽.?基于MBD模型自動生成測試用例的軟件測試方法[J].?實驗與測試,?2018,?37(9):?77-80.
[20]?李哲帥.?基于ISO_26262標準的高壓共軌ECU控制模型設計及測試研究[D].?杭州:?浙江大學,?2018.
Research?on?Control?Strategy?of?an?Adaptive?FrontLight?System?of?Vehicles?with?ElectronicallyControlled?Air?Suspensions
JIA?Zhaogong,?TENG?Liwei,?SUN?Fuquan,?YAN?Tianyi
(School?of?Electromechanic?Engineering,?Qingdao?University,?Qingdao?266071,?China)
Abstract:??In?order?to?improve?ride?comfort,?fuel?economy?and?trafficability,?the?electronic?controlled?air?suspension?vehicle?must?charge?and?deflate?the?air?spring,?but?this?will?cause?a?significant?change?in?the?headlamp?irradiation?angle.?If?the?irradiation?angle?is?not?adjusted?reasonably,?it?will?inevitably?reduce?the?night?driving?safety.?In?order?to?improve?the?night?lighting?effect?of?headlamp,?a?vertical?adjustment?control?strategy?of?headlamp?illumination?angle?of?adaptive?headlamp?system?(AFS)?is?proposed?based?on?the?technical?requirements?of?the?national?standard?GB7258?"Technical?Conditions?for?Safety?of?Motor?Vehicle?Operation",?and?the?signal?changes?of?body?height?and?speed,?to?reasonably?adjust?the?illumination?angle?of?headlamp.?The?control?strategy?model?is?established?by?using?MATLAB/Simulink?and?Stateflow,?and?simulation?is?taken.?The?simulation?results?show?that?the?proposed?control?strategy?can?improve?the?night?driving?safety?of?the?vehicle?with?electronic?air?suspension?system.
Key?words:??electronically?controlled?air?suspension?system;?adaptive?frontlight?system;?night?driving?safety;?headlamp?angle?adjustment;?control?strategy
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36