一種可伸縮單果采摘器的設計
2020-03-08 12:53:00王麗娟劉志剛喜冠南彭超華
江蘇農業科學 2020年21期
王麗娟 劉志剛 喜冠南 彭超華
摘要:設計一種新型可伸縮的單果采摘器及具備柔性防護的水果收集裝置,用于輔助果農進行果實采摘與收集,旨在降低果農的勞作強度、提高果園生產率、提高水果品質,推動我國水果采摘的機械化發展。該水果采摘器主要用于:(1)蘋果類水果生長過高以及分布不均勻導致不易采摘的情形;(2)桃子類多汁且脆硬水果在采摘過程中容易碰傷導致水果不易存儲的情形。采摘器主要包括伸縮管、牽拉機構、剪切刀、柔性網筒及可移動收果小車等5個部分。該裝置操作簡單、價格低廉、實用性強,適用于不同高度、多種類水果的采摘作業。
關鍵詞:可伸縮采摘桿;單果采摘器;牽拉機構;剪切刀;單果收集
中圖分類號:S225.93?文獻標志碼:A?文章編號:1002-1302(2020)21-0245-04
隨著我國社會經濟的快速發展以及人民消費水平的迅速提高,使得人們對水果的需求和品質都提出了更高的要求,這種現象也在我國近年來的水果市場不斷擴大的趨勢上有所體現。但受制于傳統的果園管理水平和水果采摘技術,我國果農仍以人工采摘為主,在生產過程中損失的水果數量也是不計其數。在水果實際采摘過程中,農業生產者往往會遇到諸多問題,其中最突出的大致有以下3個方面:(1)蘋果類水果生長過高以及分布不均勻導致不易采摘;(2)桃子類多汁且脆硬水果在采摘過程中容易碰傷導致水果不易存儲;(3)因為水果的成熟期不一致,導致果農在采摘時容易造成誤判進而導致果農造成誤采。據相關數據顯示,我國水果采摘的平均損耗率高達20%,而水果采摘過程中造成的經濟損失超過1 000億元/年。發達國家的水果損耗率卻普遍低于5%,甚至有些國家的損耗率僅有1%~2%。
因此,針對在水果的采摘和收集過程中所存在的問題,本研究開發了一套能輔助果農進行單果采摘的可伸縮采摘桿及柔性防護收集裝置,旨在降低果農的勞作強度、降低過程成本、提高果園生產率、提高水果品質,促進我國的果園種植業的進步,追蹤世界前沿農業技術,推動我國水果采摘的機械化發展。
1 國內外摘果器的研究現狀分析
1.1 機械式采摘方式分類與對比
目前,水果機械式采摘方式主要有以下3類:切割式、撞擊式和振搖式。切割式又可分為動力切割式與機械切割式,主要是通過刀具將果柄與果枝切斷,進而分離。撞擊式則是利用裝機部件撞擊果樹枝干或者果枝的棚架,通過振動使果實與果枝分離墜落。振搖式則是通過外力使果樹或部分果枝發生搖晃或振動,使得果實與果枝在連接脆弱處斷裂,從而實現分離。對比3種機械式采摘法,撞擊式與振搖式采摘損傷率高,不適用于采摘桃子類易損傷并對果實表面完好率要求較高的水果的采摘與存儲。
1.2 國外水果采摘器的發展現狀與方向
為了解決水果采摘這一難題,法國人于20世紀40年代初率先提出了簡易采摘器以輔助人工采摘。從20世紀40年代中期開始,以美國為代表的歐美國家開始研究開發振搖式采摘機械[1],但受制于當時的技術條件,采摘效率較低,且損傷率較高。
目前,國外主要以采摘機械手為核心來進行水果采摘器的研究。最早提出借助自動化設備在水果采摘領域進行輔助工作的是美國學者[2],他們提出了利用水果采摘機器人來輔助采摘柑橘類的果實;此后,各國都興起了對果園輔助采摘設備的研究,1985年法國科學家對蘋果類的水果開發了一套具有2支機械臂的樣機;而日本崗山大學的學者在智能化的程度上更進一步,通過設計移動機械手智能控制系統來進行目標識別而后進行輔助采摘。
對于全自動的采摘機械手而言,果實成熟度識別與精準定位是研究的重點與難點,是決定采摘效率與采摘質量的主要因素,目前研究方向也主要聚焦于這2個重點與難點。主要待解決的問題有以下幾個方面:(1)更高精度的定位技術;(2)更準確的成熟度識別技術;(3)更加靈活的機械手與執行末端;(4)易于果農操作的實用性與多功能作業。
1.3 國內水果采摘器的發展現狀與發展方向
從20世紀90年代起,我國相關科研院所也逐漸開始對智能化水果采摘機器人及設備進行研究。楊文亮等根據蘋果的幾何參數,參考機械手的結構,設計了腰部可實現升降的末端執行機構[3-4];顧寶興等在低矮密植型果園的研究基礎上,設計了一種多動作智能協調控制的水果采摘機器人[5]。
我國南方的果園大多處于丘陵山區,屬于坡地,因此合適的采摘機械很少,在危險性方面的問題也更加突出。由于工作環境的復雜性,采摘機器人的發展仍未達到農業生產的要求,尤其是視覺識別與行走裝置,距離實用化和商品化還有一定的距離[6-7]。
通過對國內外的水果機械采摘技術進行比較分析可知,國內外科研人員在該領域做了許多研究工作,但水果采摘是極其復雜的系統工程,目前仍有不少難題沒有解決,(1)針對水果采摘的前端執行系統研究較多,但對末端存儲系統研究不足;(2)前端執行系統以精密機械采摘手臂、采摘機器人為主,對于我國以自主分散經營為主的果農而言,實用性不盡如人意。
因此,本研究擬開發一套既操作簡單、實用性強,又可伸縮的單果采摘桿,以滿足不同高度水果的采摘作業。
2 單果可伸縮采摘器設計
2.1 采摘器的組成與作用過程
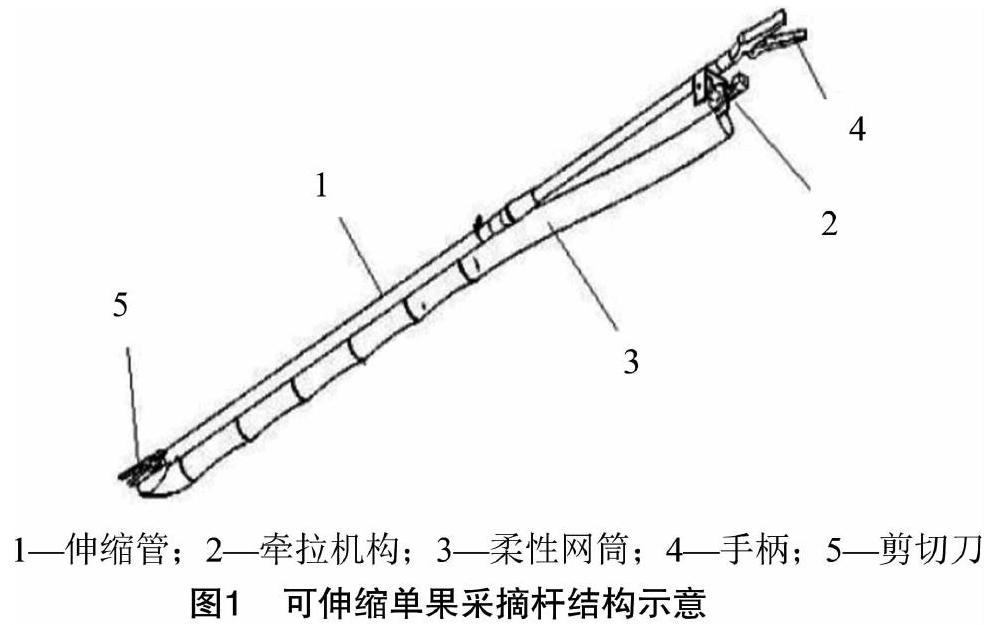
本研究提供的輔助采摘器主要包括伸縮管、牽拉機構、剪切刀、柔性網筒及可移動收果小車等5個部分。伸縮管的一端鉸接有手柄,伸縮管的另一端插接有剪切刀,牽拉機構連接于伸縮管的管身,手柄經由牽拉機構與剪切刀連接;網筒連接于伸縮管的下側,并且網筒的一端開口與剪切刀相對,另一端開口沿伸縮管的管身延伸至手柄下方;按壓手柄使得牽拉機構驅動剪切刀作業將切落水果墜于柔性網筒內,并且水果經由網筒滾落而下,落入收集小車內。整體結構示意圖見圖1。
2.2 剪切式采摘方案設計
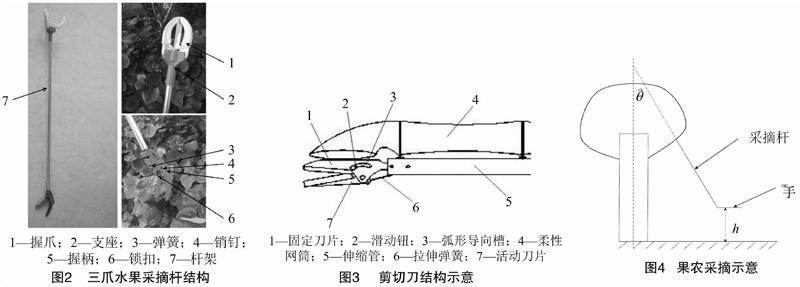
圖2即為目前市面上常見的三爪水果采摘桿,這種桿子具有水果保護好、使用方便以及結構可靠的特點,但受制于原始結構設計,采摘后三爪緊扣住果實,不利于果實自動掉落,其在采摘效率尤其是水果的收集問題上存在較大的缺陷。其次,固定長度的管子無法滿足不同高度的水果采摘作業要求。
因此針對上述缺點,考慮到在果園日常生產中,利用剪刀進行采摘更符合實際使用,有利于后續收集掉落的水果,因此以剪刀頭為主要工作方式,確定剪切式采摘和可伸縮管的設計方案。
剪切刀包括連接刀柄的固定刀片和活動刀片,活動刀片鉸接于固定刀片之上,刀柄插接于所述伸縮管的相應端部,并且固定刀片的刀身具有弧形導向槽,活動刀片的刀身具有滑動于上述弧形導向槽的滑動鈕,滑動鈕滑動于弧形導向槽內時活動刀片配合固定刀片完成剪切作業。剪切刀的結構如圖3所示。且剪切刀插接在伸縮管的端部,可以根據使用需求更換開口度不同的各式剪切刀。
剪切刀的活動刀片與伸縮管之間連接有拉伸彈簧,第2牽拉繩的端部與活動刀片的滑動鈕連接,第2牽拉繩被拉拽時,剪刀克服彈簧的拉力咬合進行剪切作業,第二牽拉繩被松開時,剪刀在彈簧的拉力作用下張開。
2.3 水果采摘桿長度分析
常見的果樹屬于灌木或喬木,其高度通常在 2~6 m,在果園的生長環境中通常經過修剪,因此其果實生長較為緊密,在設計過程中須注意結構緊湊,同時考慮到設計的采摘桿為手持工作式,因此有必要對其內部結構進行精簡,便于果農的攜帶與攜持。綜上所述需求,針對桿子的長度進行預估,假設樹高為3.0 m處有一果子待采摘,一般果農平均身高為1.7 m,其臂的高度應為1.3 m,工作示意圖如圖4所示。
假設桿子與果樹的垂線夾角為θ,通過基礎幾何知識可知,桿長(l)為l=3.0-1.3cosθ。
通常情況下夾角在30°~60°之間較為合適,所以桿的長度在2.0~3.4 m較為合適。
2.4 可伸縮采摘桿方案設計
2.4.1 伸縮桿設計 為滿足長度為2.0~3.4 m的伸縮桿,采用伸縮管結構,該伸縮管由管徑不同的第1支管、第2支管經由伸縮節連接而成,結構示意圖見圖5。通過在桿子連接處以1個螺母進行壓緊固定,以此便可通過調整螺母的松緊程度以實現桿子的伸縮,由于桿子的伸縮調整是帶動內部鋼絲線的長度一起調整的,在調整長度的時候,須要將內部的鋼絲線一起進行調整,以保證整個采摘桿可以正常工作。伸縮管的側壁間隔插接有若干網筒環,柔性網筒套在網筒環內并固定在伸縮桿上(圖6)。
2.4.2 杠桿機構設計 牽拉機構是一個杠桿機構,伸縮管的側壁開設有通孔,杠桿機構置于通孔處。該杠桿機構包括固定架、固定環、轉軸、杠桿以及換向輪,固定架連接于固定環一側,固定環套接于通孔一側的伸縮管管身上并且使得固定架位于通孔處,杠桿經由轉軸可翻轉地連接于固定架,并且杠桿的一端位于伸縮管的外部,而另一端位于伸縮管的內部;換向輪可轉動地設置于伸縮管內;杠桿位于伸縮管外側的一端連接有第1牽拉繩,連接到按壓手柄上;杠桿的另一端連接有第2牽拉繩,并且第2牽拉繩經由換向輪換向后與活動刀片相連接。作用原理為當按壓手柄時,手柄帶動第1牽拉繩拉拽杠桿的一端,杠桿翻轉使得第2牽拉繩牽拉活動刀片使得其朝向固定刀片咬合完成剪切動作。其結構示意見圖7。
2.4.3 收線機構設計 為了有效控制不同伸縮管長度下的有效剪切,伸縮管靠近手柄的一側設置有收線架(圖8),收線架的一側可轉動地設置有卷筒,收線架靠近手柄的一側設置有與卷筒相對的收線塊,收線塊朝向卷筒的一側固定連接有收線頭,結合圖9收線塊以及收線頭上同軸設置牽拉孔,收線頭與收線塊連接的一側呈柱狀,其位于導向孔外側的端部徑向延伸形成卡線臺階,收線頭的收線臺階的邊緣設置有若干卡線槽;第1牽拉繩的一端纏繞于收線頭外部,并且第1牽拉繩穿過并卡持于卡線槽內;手柄連接有第3牽拉繩,第3牽拉繩另一端穿過牽拉孔并且在牽拉孔外部連接有牽拉環,第1牽拉繩穿過牽拉環,壓動手柄使得第3牽拉繩拉動牽拉環,牽拉環牽拉第1牽拉繩,第1牽拉繩經卷筒換向后拉動杠桿翻轉繼而使得第2牽拉繩拉動活動刀片。利用收線頭可以將調節伸縮管縮短時產生的第1牽拉繩冗余部分纏繞在收線頭上,或調節伸縮管伸長時將收線頭上的牽拉繩釋放,彌補第1牽拉繩欠缺部分,確保手柄能夠有效地控制剪切刀。收線頭結構如圖9所示。
2.5 收集裝置方案設計
設計了水果輔助采摘桿,在流程上,水果被采摘桿上的剪刀剪下繼而掉落。接下來的問題便可簡化成如何針對高空掉落的水果進行快速并持續的收集以及收集后進行后處理。針對上述問題,本研究提出的解決方案是設計1輛輔助收集小車,在水果收集過程中水果存在碰傷的問題,其根源在于水果掉落的速度過大,賦予其過大的動能,若在水果掉落的過程中不對其進行合理的減速,便會使得其因為過大的動能而造成水果表面的碰傷。本研究設計的輔助收集小車將配合采摘桿的滑落軌道進行組合工作。輔助收集小車示意見圖10。
3 試驗驗證
本研究所設計的水果采摘器由可伸縮采摘桿及可移動收集小車組成。為驗證所設計的采摘器的使用效果,在蘋果園內選取果實密度與樹干高度相近的2顆果樹進行采摘,展開試驗,將本研究所設計的采摘器采摘與傳統徒手采摘的效果進行對比與分析,將徒手采摘定義為對照組,將采摘器采摘定義為試驗組。
試驗人員為果園內的工作人員,對照組2人1組,試驗組1人單獨操作,對照組與試驗組的采摘人員為同一人。對照組的采摘方法為一人徒手或借助剪刀進行采摘,另一人進行果實收集與裝箱,對于高處的蘋果可借助梯子類工具進行采摘。試驗組的采摘方法為無需借助梯子類工具,單人獨立操作完成采摘與果實收集。采摘時間均為10 min,采摘員自下而上進行采摘,每2 min記錄1次數據,統計結果見表1。將采摘器采摘與傳統徒手采摘相比,使用采摘器在節省1個人力的情況下,采摘效率是對照的1.96倍。對于果實生長高度較高的果實,無需借助梯子等工具,可伸縮采摘桿的優勢得到了充分發揮,可移動收集小車則節省了果實傳遞與裝箱的時間,采摘更加便捷輕松。由此可知,本研究設計的采摘器具有一定的合理性與可行性。
4 結論
本研究所設計的可伸縮單果采摘器體積小,結構輕巧;質量輕,便于攜帶;操作簡單,實用性強;價格低廉,易于推廣;適用于不同高度、多種類水果的采摘作業。它不僅能夠降低果農的勞作強度、降低采摘過程成本、提高果園生產率、提高水果品質,還能促進我國的果園種植業的進步,追蹤世界前沿農業技術,推動我國水果采摘的機械化發展。
采摘者只需將伸縮桿長度調至果實的果柄部位,按鈕手柄控制剪切刀頭,操作簡單,無需冗余動作。另外,由于設計結構簡單,對所采摘單果的大小基本沒有限制,因此,適用范圍很廣,使用便利,是我國以自主分散經營為主的果農的首選,經濟效益及社會效益顯著。
參考文獻:
[1]段潔利,陸華忠,王慰祖,等. 水果采收機械的現狀與發展[J]. 廣東農業科學,2012,39(16):189-192.
[2]Finney E E. Dynamic elastic properties of some fruits during growth and development[J]. Journal of Agricultural Engineering Research,1967,12(4):249-256.
[3]楊文亮. 蘋果采摘機器人機械手結構設計與分析[D]. 鎮江:江蘇大學,2009.
[4]王鳳云,劉繼展,李萍萍. 采摘機器人末端執行器研究現狀與展望[J]. 農機化研究,2011,33(11):10-14.
[5]顧寶興,姬長英,王海青,等. 智能移動水果采摘機器人設計與實驗[J]. 農業機械學報,2012,43(6):153-160.
[6]馬質璞,張 抗,譚 驥,等. 一種新型單果采摘器的設計[J]. 機械設計與制造,2017(5):252-255.
[7]雷旺雄,盧 軍. 葡萄采摘機器人采摘點的視覺定位[J]. 江蘇農業學報,2020,36(4):1015-1021.羅皓峰,楊啟良. 松針覆蓋層厚度和風速對水分蒸發量的影響機制[J]. 江蘇農業科學,2020,48(21):249-254.