基于PLC控制的采棉機采棉頭提升液壓系統設計
2020-03-08 12:53:00傅依新木合塔爾·克力木
江蘇農業科學 2020年21期
關鍵詞:液壓系統
傅依新 木合塔爾·克力木


摘要:為解決采棉機遇到路面障礙物時采棉頭升降液壓缸不同步問題,對整個液壓系統進行設計。采用AMESim仿真的方法,首先對采棉機采棉頭升降液壓系統進行了AMESim液壓系統建模,施加變化的負載,分析整個液壓系統液壓缸的運動情況;其次,對整個采棉機采棉頭升降液壓系統施加PID控制,使3個液壓缸升降同步效果更好;最后對整個液壓系統進行可編程邏輯控制器(programmable logic controller,PLC)設計,實現PID控制。結果表明,通過PID控制,可以實現3個液壓缸的同步效果;對采棉機采棉頭升降系統進行PLC設計,實現PID控制。
關鍵詞:液壓系統;不同步;PID控制;PLC設計
中圖分類號:TH137.7;S225.91+1?文獻標志碼:A?文章編號:1002-1302(2020)21-0233-05
我國是世界上棉花單產量最高的國家,新疆地區由于自然條件的優勢,非常適合種植棉花,所以采棉機的研究對于新疆地區來說具有非常重要的意義[1-2]。目前國內外采棉機分為2種形式,包括垂直摘錠式和水平摘錠式,垂直摘錠式采棉機采棉部件結構簡單、制造容易、成本較低,但是需要考慮采棉頭升降問題。本研究是在垂直摘錠式的基礎上進行的。本垂直摘錠式三行采棉機采棉頭共3組,每組采棉頭分別由2個采棉滾筒組成,當遇到障礙物時,每組采棉頭由一個液壓缸控制升降。但是實際過程中,3組采棉頭的升降過程中出現運動不同步現象。本研究采用常見的閥后補償控制系統[3-4],進行液壓系統設計,并且對整個液壓系統施加PID控制,以達到同步的效果,最后進行PLC設計,以實現PID控制功能。
1 采棉頭升降液壓系統設計及基本方程
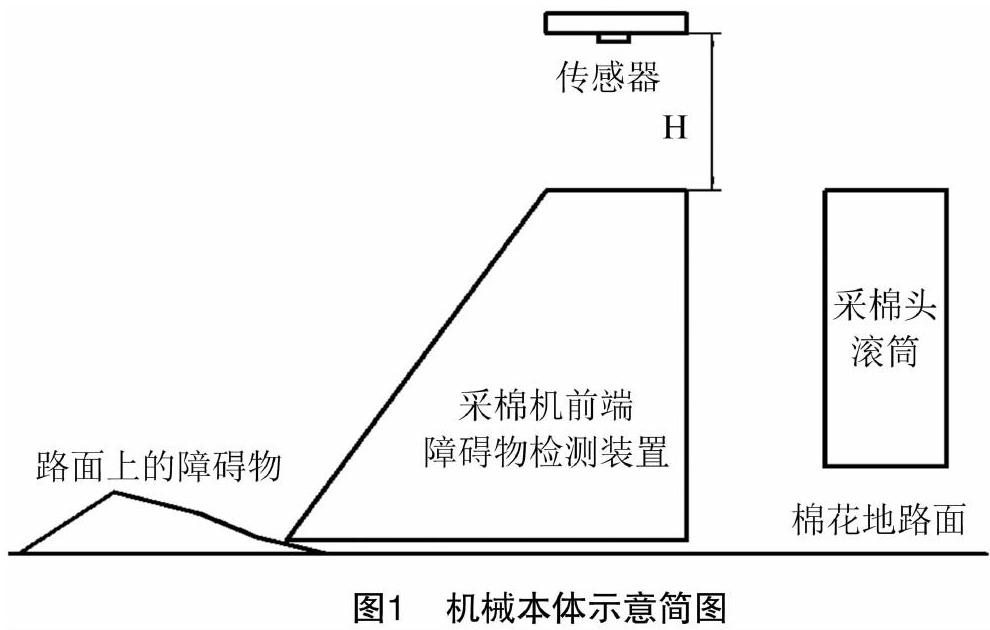
1.1 機械本體介紹
圖1為1組采棉頭的示意簡圖,當采棉機前端障礙物檢測裝置被路面上的障礙物頂起時,傳感器前端障礙物檢測裝置與傳感器的距離為H,傳感器把信號傳輸到PLC中,從而用PLC控制采棉頭的升降,以避免觸碰到障礙物。本研究使用1個傳感器控制3個采棉頭的升降,以達到同步的效果。
1.2 液壓系統設計
本液壓系統采用1個負載敏感泵控制3個液壓缸,其中1個液壓缸控制1個采棉頭的升降。采用負載敏感泵,使整個液壓系統的節能效果更好;液壓油從負載敏感泵1流經單向閥3,通過換向閥4控制液壓缸的伸出與縮回;梭閥6將高壓油引向補償器5和負載敏感泵1,從而控制液壓缸的同步和整個系統的流量壓力。
1.3 必要參數
通過ADAMS軟件仿真,液壓缸的出力約6 000 N,經計算選液壓缸桿徑(d)為50 mm,缸徑(D)為 80 mm,系統的壓力為5 MPa,流量100 L/min。3個換向閥選擇原上海立新直動式比例換向閥4WRA10E60-L2X/G24-15-N9-Z4,由于此負載敏感泵同時控制采棉機的采棉頭提升、發棉頭防卡、棉花壓實和棉箱側翻系統,所以此處暫時不選擇型號。
1.4 基本方程
變量泵排量為
式中:wp為變量泵的轉速(r/min);Cip為泵內泄漏系數;Cep為泵外泄漏系數;pr為低壓管道的補油壓力(MPa);p1為高壓管道的壓力(MPa)。
滑閥的壓力-流量特性方程為
式中:Ap為缸有效面積(m2);xp為活塞位移(m);Ctp為缸總泄漏系數;V1為缸進、回油腔容積(m3);βe為體積彈性模量;t表示時間(min)。
2 系統仿真分析
2.1 不施加控制的液壓系統仿真
原液壓系統采用1個定量泵控制3個液壓缸,每個液壓缸各通過1個節流閥控制流量,仿真模型如圖3所示。
對液壓缸施加不同的負載力(圖4)。
根據牛頓第二定律知:
式中:F為采棉頭液壓缸負載力(N);m為采棉頭總質量(kg);g為重力加速度(9.8 m2/s);a為采棉頭加速度(m2/s)。
加速度公式:
式中:vmax為采棉頭上升的最大速度(m/s);x為采棉頭升降位移(m)。
根據實際測量,采棉頭的總質量為600 kg,升降位移為0.7 m,采棉頭上升的最大速度為0.5 m/s。所以當采棉頭靜止時,采棉頭液壓缸所承受的負載力為5 880 N,當取最大速度時,負載力為6 180 N。為確保實際工作中更加穩定可靠,仿真過程中將負載力的范圍擴大到4 000~8 000 N之間?對3個采棉頭施加不斷變化的負載力,為確保在不同時刻3個液壓缸的負載力大小不同,對3個的液壓缸的負載力分別施加了0.2、0.1、0.3 Hz的頻率(圖4)。
設置采棉機在3 s時開始遇到路面上的障礙物,5 s時采棉機到達障礙物的最高點,之后開始下降直至到達路面。仿真結果如圖5所示,可以看出,在不施加任何控制時,液壓缸的伸出是不同步的,導致在遇到障礙物時3個采棉頭的升降不同步,5 s時3個液壓缸的活塞位移明顯不同。
2.2 施加PID控制液壓系統仿真
2.2.1 液壓缸同步控制策略 同步控制[6]方式分為同等控制方式、主從控制方式、交叉耦合控制方式。同等控制是指多個需要同步控制的對象跟蹤設定的輸出分別受到控制,通過各自的控制器調節并跟隨目標值,從而達到所要求的理想同步動作;主從方式,是指在系統中存在多個需要同步運動的對象,其中一個對象的輸出作為其他對象的輸入,從而達到同步控制的目的。本次仿真采用同等控制和主從控制2種控制結合的方式,已達到同步的效果(圖6)。
2.2.2 仿真模型建立 圖7為在AMESim中創建的液壓系統仿真模型。部分關鍵參數設置:壓力補償閥HCD模型參數從左到右依次為D31=10 mm、d31=0 mm、f31=1 N、f32=12 N/mm、S3=6 mm、m3=0.01 kg、μ3=30 N/(m·s)、l3=-5-5 mm、D=10 mm、D32=8 mm、d32=0 mm。
式中:D31、d31、f31、f32、S3、m3、μ3、l3、D、D32、d32分別為活塞筒直徑、活塞桿直徑、零壓縮作用下彈簧作用力、活塞彈簧剛度、在零位移下的彈簧壓縮量、質量塊質量、質量塊黏性摩擦系數、位移限制、柱塞彈弓直徑、柱塞筒直徑及柱塞桿直徑;電磁換向閥的流量為45 L/min;液壓缸的黏性摩擦系數為 1 000 (N·s)/m,液壓缸活塞桿的最大位移為 0.7 m。對液壓系統施加PID控制[7-9],共設置了3個PID控制器,PID參數從左到右依次為P1=300、I1=10、D1=-2;P2=20、I2=10、D2=-1;P3=300、I3=10、D3=-2。
2.2.3 仿真結果分析 仿真時設置采棉機在地3 s時開始遇到路面上的障礙物,6 s時采棉機到達障礙物的最高點,之后開始下降直至到達路面(圖8)。由圖8可知,3 s時傳感器檢測到障礙物,3個液壓缸開始升起,到達6 s時,液壓缸上升到最高點,之后開始下降到最低點。可以看出,施加PID控制之后要比沒有施加控制時3個采棉機升降液壓缸同步效果更好。
3 PLC設計
3.1 PLC選型
本次PLC控制[10]設計只考慮了采棉機采棉頭提升系統,忽略了側翻、壓實和風機系統。選擇西門子CPU ST20晶體管PLC。12點輸入,8點輸出,擴展了EMAM06和EMAQ02模塊,共4個模擬量輸入點和4個模擬量輸出點。
3.2 PLC輸入、輸出
圖9為PLC輸入輸出分配表。其中利用了EMAM06和EMAQ02模塊中的3個模擬量輸入接口和3個模擬量輸出接口。
3.3 PLC程序設計(實現PID控制)
圖10為控制負載敏感泵(電機)的開啟與關閉程序,1個負載敏感泵控制3個采棉頭的升降。
圖11為對一個采棉頭升降液壓缸施加的PID控制[11],PID控制模塊采用的是模擬量輸出模塊,其中模擬量標定和過程變量標定全為雙極性,控制電壓為±10 V。施加的P、I和D的數值與前面仿真時相同。
4 結論
本研究對采棉機采棉頭升降液壓系統進行了設計,得出結論:(1)為解決采棉機遇到路面障礙物時采棉頭升降液壓缸不同步問題,采用閥后補償原理對液壓系統進行設計,通過AMESim仿真,分析未施加控制和施加PID控制時液壓缸運動情況,得出結論:施加PID控制之后3個采棉機升降液壓缸的同步效果要比沒有施加控制時更好。(2)對系統進行PLC控制設計,編寫PID控制模塊調用程序,利用PLC實現PID控制,以解決采棉機遇到路面障礙物時采棉頭升降液壓缸不同步問題。
參考文獻:
[1]王俊鐸,李雪源,梁亞軍,等. 新疆植棉區2017年棉花種業報告[J]. 棉花科學,2018,40(5):5-11.
[2]王建潭,木合塔爾·克力木. 采棉頭可拼裝式采棉機液壓系統的設計[J]. 農機化研究,2018,40(10):57-62.
[3]馬春峰,隋冬枝. 閥前補償和閥后補償的特點及應用[J]. 煤礦機械,2014,35(8):208-210.
[4]喬彥華. 閥前和閥后補償調速在使用中需注意的問題[J]. 煤礦機械,2019,40(7):137-139.
[5]聞德生,商旭東,潘為圓,等. 雙定子多輸出泵控差動缸回路的研究[J]. 液壓與氣動,2017(11):23-28.
[6]屈盛官,肖傳偉,方 波,等. 基于AMESim的負載敏感泵壓力-流量特性影響因素探究[J]. 液壓與氣動,2019(5):64-71.
[7]何少佳,閆奧博,祝新軍,等. 液壓振動臺位移補償的PID控制方式的研究[J]. 制造技術與機床,2019(5):72-75.
[8]寇發榮,李 冬,許家楠,等. 車輛電動靜液壓主動懸架內模PID控制研究[J]. 液壓與氣動,2018(6):1-7.
[9]羅娜娜,李 廣. 基于非線性PID控制的挖掘機液壓系統穩定性研究[J]. 中國工程機械學報,2019,17(4):367-370.
[10]劉 洋. 西門子工業控制的PLC應用與技術分析[J]. 南方農機,2019,50(11):198.
[11]夏正龍,鄧 斌. 專家規則PID控制算法在西門子PLC中實現編程設計[J]. 機電工程技術,2019,48(5):30-32,73.尤寬山,宋 力,沈 靜,等. 新型濕地型多功能工作機切割器設計[J]. 江蘇農業科學,2020,48(21):238-241.
猜你喜歡
商情(2016年42期)2016-12-23 16:53:09
東方教育(2016年3期)2016-12-14 20:51:31
中國教育技術裝備(2016年20期)2016-12-12 10:03:08
企業技術開發·中旬刊(2016年10期)2016-11-12 16:11:54
大學教育(2016年9期)2016-10-09 08:45:14
科技視界(2016年20期)2016-09-29 11:42:34
科技視界(2016年14期)2016-06-08 19:01:12
科技視界(2016年11期)2016-05-23 00:34:58
科技視界(2016年9期)2016-04-26 09:59:35
科技視界(2016年10期)2016-04-26 00:49:08