一種步進式壓電陶瓷驅動器負載模型研究
2020-03-04 02:48:41王學亮彭吉徐立松李朋志陳雪鄭楠李佩玥
現代電子技術 2020年2期
關鍵詞:數據分析
王學亮 彭吉 徐立松 李朋志 陳雪 鄭楠 李佩玥


摘 ?要: 為了能夠準確高效地以步進式壓電陶瓷驅動器進行定位控制,文中對其在不同負載力條件下的位移性能進行了研究。首先,設計和實施了測定驅動器位移?負載力曲線的實驗;然后,通過高階多項式擬合的方法對實驗結果進行擬合,分析得到可用的擬合結果,將其作為被測驅動器的位移?負載力關系;最后,隨機選取了其他的負載力條件,將實測位移量與通過擬合曲線進行計算的結果進行對比,驗證該位移?負載力模型的準確性。實驗結果表明,使用該方法獲得的步進式壓電陶瓷驅動器的位移?負載力模型可用2階多項式關系進行描述,與實測值的誤差約為1%,可為后續針對該驅動器進行定位控制算法設計提供支撐。
關鍵詞: 壓電陶瓷; 步進式驅動器; 定位控制; 負載實驗; 多項式擬合; 數據分析
中圖分類號: TN305.7?34 ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)02?0014?03
Study on a load model for stepping piezoceramic actuator
WANG Xueliang1,2,3, PENG Ji1,2,3, XU Lisong1,2,3, LI Pengzhi1,2,3, CHEN Xue1,2,3, ZHENG Nan2,3, LI Peiyue2,3
Abstract: The displacement performance of the stepping piezoceramic actuator under different load force conditions isstudied to accurately and efficiently perform the positioning control with it. The experiment of measuring the displacement?load force curve of the actuator was designed and implemented. The experimental results are fitted by means of the high?order polynomial fitting method, and the available fitting results are obtained by analyzing, which are taken as the displacement?load force relationship of the actuator under test. Other load force conditions are selected randomly, and the measured displacement values are compared with the results calculated by the fitted curve to verify the accuracy of the displacement?load force model. The experimental results show that the displacement?load force model of the stepping piezoceramic actuator obtained with this method can be described by the second?order polynomial relation, and the error of this method is about 1% in comparison with the measured value; which can provide a support for the subsequent design of positioning control algorithm for this actuator.
Keywords: piezoceramic; stepping actuator; positioning control; load experiment; polynomial fitting; data analysis
0 ?引 ?言
壓電陶瓷材料具有分辨率高、頻率特性好、輸出力大、無磁干擾和發熱小等優點,被廣泛作為納米級定位系統的執行機構使用[1?4]。疊堆式壓電陶瓷的伸長量通常為陶瓷自身長度的0.1%,因此很難使用疊堆式壓電陶瓷實現mm量級的定位行程[5?7]。為了實現mm量級的定位行程,同時保證nm量級的定位精度,人們利用多個疊堆式壓電陶瓷構建了步進式壓電陶瓷驅動器,具有體積小、行程大和精度高等優點。國內外的學者對步進式壓電陶瓷驅動器開展了廣泛的研究:黃衛清等人針對光波導封裝應用場景,研究了一種非共振式壓電電機驅動的旋轉定位平臺,通過連續作動和步進作動兩種工作模式實現大行程和高精度[8];HO和JAN提出一種具有交流?直流復合驅動模式的步進式壓電電機,通過交流驅動模式和支流驅動模式的切換,既可以實現高速運動又可以實現nm量級分辨率[9];曹小濤等人為實現大行程和高精度的位移控制,利用非共振式尺蠖型壓電直線電機,基于高壓功率運算放大器,設計了非共振式壓電直線電機的精密復合放大驅動電路和具有遲滯前饋的復合控制算法[10];DENG和XU等人提出一種基于壓電材料的二維彎曲特性制成壓電步進驅動器[11],針對該類驅動器,通過施加雙相支流驅動電壓,提出了八步運動規劃[12];程光明等人針對壓電慣性驅動器,研究了壓電雙晶片振子在方波激勵下的沖擊響應,使用加速度傳感器測試慣性沖擊力,完成實驗驗證[13]。
以上的研究多針對步進式壓電陶瓷驅動器的構建和驅動等問題展開,而針對其定位性能受外部負載力影響,即位移?負載力模型的研究較少。而在實際使用步進式壓電陶瓷驅動器構建定位系統時,為了保證nm量級的定位精度,通常使用柔性結構作為壓電陶瓷驅動器的導向,當輸出位移量時,隨著壓電陶瓷驅動器的推動,柔性結構發生形變,對驅動器施加的外部負載力隨之變化,這將導致驅動器的控制模型發生改變。雖然這種影響可以通過外部加入位移傳感器構成位置閉環系統最終加以消除,但將不可避免地增加算法的迭代次數,進而影響定位系統的快速性。為了準確高效地使用步進式壓電陶瓷驅動器進行高精度的快速的定位控制,本文對步進式壓電陶瓷驅動器的位移?負載力模型進行研究。
1 ?研究對象及其工作原理
本文的研究對象為Physik Instrumente(PI)公司N?111.20型壓電陶瓷驅動器,該驅動器采用一種稱為NEXLINE的步進技術實現:驅動器內部由運動軸和壓電疊堆組成。其中壓電疊堆分為兩組,每組由剪切(shear)疊堆組件和夾持(clamp)疊堆組件構成,共計4種壓電疊堆組件,分別為clamp1組件、shear1組件、clamp2組件和shear2組件。當N?111.20型壓電陶瓷驅動器工作時,4種壓電疊堆組件按特定時序運動如圖1所示。clamp組件交替夾緊運動軸,期間shear組件交替產生位移,如此往復。利用這種多個壓電疊堆的時序運動,N?111.20型驅動器可以實現大行程下的高精度定位。
當外部負載力發生變化時,由于壓電陶瓷材料本身的特性所限,在相同的驅動電壓下壓電疊堆產生的位移也將隨之改變。圖2示意了一種標稱位移30 μm@1 000 V,剛度為200 N/μm的壓電疊堆的位移?負載力曲線,可以看到隨著負載力逐漸變大,在相同驅動電壓下壓電疊堆所產生的位移量逐漸減小。步進式壓電陶瓷驅動器是由壓電疊堆組件所構成,因此不可避免地其輸出位移也受到外部負載力影響,但同時由于其內部復雜的工作原理,其位移?負載力的關系也更加復雜。
2 ?設計實驗
為了獲得N?111.20型步進式壓電陶瓷驅動器的位移?負載力關系,本文設計了如圖3所示的實驗裝置。驅動器被夾緊工裝固定于底部隔震平臺,并由夾緊工裝保證其運動軸垂直于隔震平臺,運動軸上固定托架工裝,通過向托架工裝上增減砝碼來調整驅動器所受外部負載力。另有一Z形支撐工裝,其上固定電容傳感器,并以托架工裝下表面為被測面,以此檢測驅動器的位移量。
實驗過程如圖4所示。首先保持驅動器空載,對驅動器施加步進信號,同時通過電容傳感器測量和記錄其位移增量。然后控制驅動器返回原工作起點,重復兩次上述過程,以三次位移測量值的平均值作為當前負載力條件下的位移測量結果。以500 g為增量逐步向托架工裝上安裝砝碼,并重復上述過程,獲得不同負載力條件下的位移值。
通過上述實驗方法,對N?111.20型步進式壓電陶瓷驅動器的位移?負載力曲線進行測量,并且對位移數據進行歸一化處理,得到位移?負載力數據點如圖5所示。可以看到該驅動器隨著外部負載力的增加,其輸出位移量逐漸減小,且曲線具有非線性特征。
3 ?數據分析
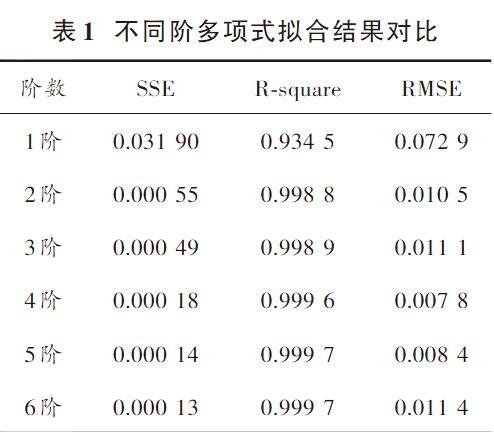
本文對以上實驗數據進行了多階多項式擬合,擬合結果如表1所示。可以看到,除了采用1階多項式擬合以外獲得結果都具有較小的和方差(SSE)與標準差(RMSE),同時其確定系數(R?square)>99%,都是可用的擬合結果。同時,綜合考慮驅動器使用過程中其控制算法的復雜性和實時性,最終選定2階多項式擬合的結果,并獲得N?111.20型壓電陶瓷驅動的位移?負載力的關系為:
[df=-0.000 55f2-0.001 7f+0.999 2]
式中:d是歸一化處理后的位移;f是單位為牛頓的負載力。
為了驗證擬合結果的準確性,隨機選取了3組負載力,測試了驅動器對應條件下的位移,并對比擬合曲線的計算結果,如表2所示。可以看到,通過擬合曲線計算的結果與實際測量的結果相差不大,誤差約為1%,因此,擬合曲線的結果是基本準確的。
4 ?結 ?論
本文針對步進式壓電陶瓷驅動器在不同負載力條件的位移性能進行了研究,提出一種位移?負載力曲線的測量方法,并使用該方法對N?111.20型步進式壓電陶瓷驅動器進行測試。對實驗結果進行擬合分析得到N?111.20型壓電陶瓷驅動的位移?負載力之間的2階多項式關系。驗證結果表明,通過該擬合曲線計算的結果和實際測量的結果誤差約為1%,能夠為后續針對該驅動器進行定位控制算法設計提供有效支撐。
參考文獻
[1] 郭嘉亮,李朋志,李佩玥.壓電陶瓷定位系統電容傳感器容錯控制[J].現代電子技術,2014,37(21):152?155.
[2] PAN Qiaosheng, ZHANG Qi, WANG Hongbo, et al. Piezoelectric linear motor using resonant?type clamping based on harmonic vibration synthesis [J]. Mechatronics, 2014, 24: 1112?1119.
[3] 王學亮,李佩玥,鄭楠,等.運放對壓電陶瓷驅動電路系統精度影響的研究[J].電子測量技術,2014,37(10):33?36.
[4] 安凱.壓電驅動器電壓及其頻率對驅動速度的影響[J].現代電子技術,2014,37(13):113?115.
[5] SUN Xiantao, CHEN Weihai, ZHANG Jianbin, et al. A novel piezo?driven linear?rotary inchworm actuator [J]. Sensors and actuators A: physical, 2015, 224: 78?86.
[6] 于月民,冷勁松.新型壓電旋轉驅動器的設計與性能測試[J].機械工程學報,2015,51(8):185?190.
[7] 韓麗玲,潘成亮,魯思穎,等.新穎微型壓電旋轉關節的建模與仿真[J].納米技術與精密工程,2016,14(3):229?236.
[8] 黃衛清,陶杰,孫夢馨,等.非共振型壓電電機驅動的大行程精密定位旋轉平臺的建模和實驗[J].光學精密工程,2016,24(11):2712?2720.
[9] HO Shinetzong, JAN Shanjay. A piezoelectric motor for precision positioning applications [J]. Precision engineering, 2016, 43: 285?293.
[10] 曹小濤,李德全,李洪文,等.非共振式壓電直線電機精密驅動及定位控制[J].光學精密工程,2017,25(8):2139?2148.
[11] DENG Jie, LIU Yingxiang, CHEN Weishan, et al. Development and experiment evaluation of an inertial piezoelectric actuator using bending?bending hybrid modes [J]. Sensors and actuators A: physical, 2018, 275: 11?18.
[12] XU Dongmei, LIU Yingxiang, LIU Junkao, et al. Motion planning of a stepping?wriggle type piezoelectric actuator operating in bending modes [J]. IEEE access, 2016, 4: 2371?2378.
[13] 程光明,李曉旭,溫建明,等.壓電慣性驅動器慣性沖擊力的分析與檢測[J].光學精密工程,2015,23(6):1681?1687.
作者簡介:王學亮(1984—),男,遼寧鐵嶺人,碩士,主要研究方向為精密位移控制系統設計。
猜你喜歡
職工法律天地·下半月(2016年10期)2016-11-30 11:52:57
商情(2016年40期)2016-11-28 11:28:07
商(2016年32期)2016-11-24 17:39:41
科技資訊(2016年18期)2016-11-15 18:05:53
考試周刊(2016年84期)2016-11-11 23:57:34
科技視界(2016年18期)2016-11-03 22:51:40
體育時空(2016年8期)2016-10-25 18:02:39
現代經濟信息(2016年19期)2016-10-20 17:46:29
中國科技博覽(2016年18期)2016-10-19 10:30:11
中國市場(2016年36期)2016-10-19 04:31:23
