壁面機器人吸附機構吸附力的仿真與試驗*
2020-03-04 03:45:20
機械制造 2020年1期
南京工業大學 機械與動力工程學院 南京 211800
1 研究背景
近年來,各地高樓拔地而起,成為城市化進程的標志。與此同時,高層建筑物壁面的裝飾、清洗等也成為改善城市面貌的重要工作。目前,大部分高樓壁面作業都由人工來完成,工作強度大,安全性低。國內外已有專家研究出用于高層建筑物外表面清洗等工作的壁面工作機器人,給壁面作業帶來了極大方便。
對于壁面機器人吸附問題,目前已有磁吸附、真空吸附、推力吸附等吸附方式發展成熟,適合應用于不同場合。吳善強等[1]基于磁吸附方式設計了應用于金屬壁面上的機器人,機器人能夠實現直角壁面的轉換,發揮了磁吸附方式下吸附力切換方便、機器人移動靈活的特點。張聯盟等[2]研究了采用吸盤吸附的壁面機器人吸附模塊姿態的控制,實現了吸附模塊與墻面相對姿態的自主檢測,滿足自主攀爬的使用需求。騰迪[3]選用離心葉輪加密封腔的負壓吸附方式設計了爬壁機器人的吸附機構,通過試驗分別分析了空氣流量、密封腔材質、密封機構安裝高度對吸附力的影響。
筆者研究了推力吸附方式下影響吸附力大小的因素,應用計算流體動力學軟件進行仿真,首先驗證仿真方法的正確性,然后采用三因素三水平正交試驗方法,確認影響吸附裝置推力大小的最顯著因素,提出最佳試驗組合,提高吸附機構的效率。
2 壁面機器人的設計
壁面機器人的主要功能包括作業、吸附、移動等。壁面機器人作業機構貼近壁面,實現作業功能。壁面機器人通過建筑物頂部的提升電機加線纜的方式,實現移動功能。吸附裝置用于推動壁面機器人吸附在墻面上,以便于工作[4-5],是壁面機器人的核心裝置。吸附裝置采用螺旋槳旋轉產生的氣流,使壁面機器人本體吸附在壁面上。這種吸附裝置對壁面要求比較低,不存在泄漏問題,所以適用于大部分壁面機器人。筆者選用在壁面機器人框架外側的四個角對稱安裝螺旋槳的吸附裝置,螺旋槳對稱安裝能較好地控制壁面機器人工作和移動時的穩定姿態[6]。由于壁面機器人移動機構含有線纜,將螺旋槳暴露在外部有可能產生安全問題,因此設計安裝螺旋槳保護外殼,一方面可以提高吸附機構的安全性,另一方面對螺旋槳的噪聲也可以起到抑制作用。
3 軟件仿真
在仿真計算過程中,控制方程采用雷諾時均納維-斯托克斯方程,湍流模型采用剪切壓力傳輸k-ω模型[7]。將計算域分為兩部分,一部分為包含螺旋槳的旋轉域,另一部分為外部的靜止域[8]。采用四面體非結構網格進行網格劃分,對旋轉域、旋轉域與靜止域的交界面、螺旋槳壁面進行網格加密。入口邊界條件選擇速度入口,入口速度為零,出口邊界條件選擇壓力出口,壁面邊界條件為無滑移的光滑壁面。
筆者選用文獻[9]研究的一款用于無人機的多旋翼螺旋槳來驗證計算流體動力學軟件仿真方法的正確性。通過試驗獲得螺旋槳在不同轉速下的拉力,同時應用逆向建模的方法獲取螺旋槳的基準翼型、弦長分布、安裝角分布等結構參數。基于三維參數,應用CATIA軟件進行三維建模,螺旋槳三維模型如圖1所示。螺旋槳建模完成后,進行仿真,推力仿真結果與試驗結果對比如圖2所示。由圖2可知,螺旋槳推力仿真結果稍小于試驗結果,這是由于仿真環境與現實環境存在差異。推力誤差小于5%,仿真結果較好,驗證了計算流體動力學軟件仿真方法的正確性。
▲圖1 螺旋槳三維模型
4 正交試驗
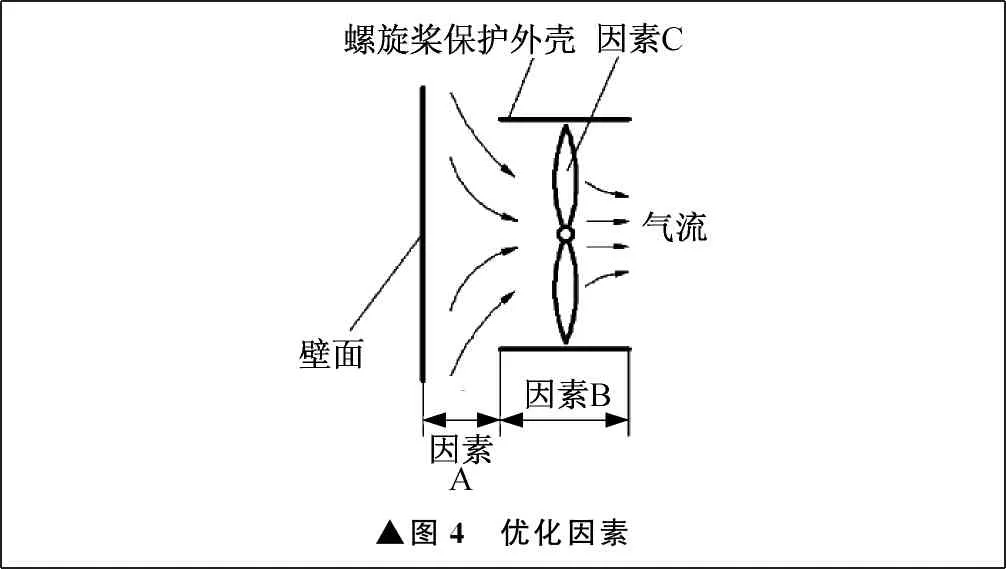
螺旋槳保護外殼提高了壁面機器人的安全性,但是保護外殼同時改變了空氣流域,對螺旋槳的推力產生影響[10]。對于壁面機器人吸附裝置的最佳工作方式,需要考慮螺旋槳保護外殼的結構參數、安裝等因素的影響。筆者在試驗獲取螺旋槳參數的基礎上,將螺旋槳直徑改為431.8 mm,將基準翼型改為更適合懸停狀態的Clark Y翼型[11],其余參數與上述試驗螺旋槳參數相同。螺旋槳保護外殼為壁厚5 mm的豎直圓形通道,內徑為440 mm。吸附機構如圖3所示。
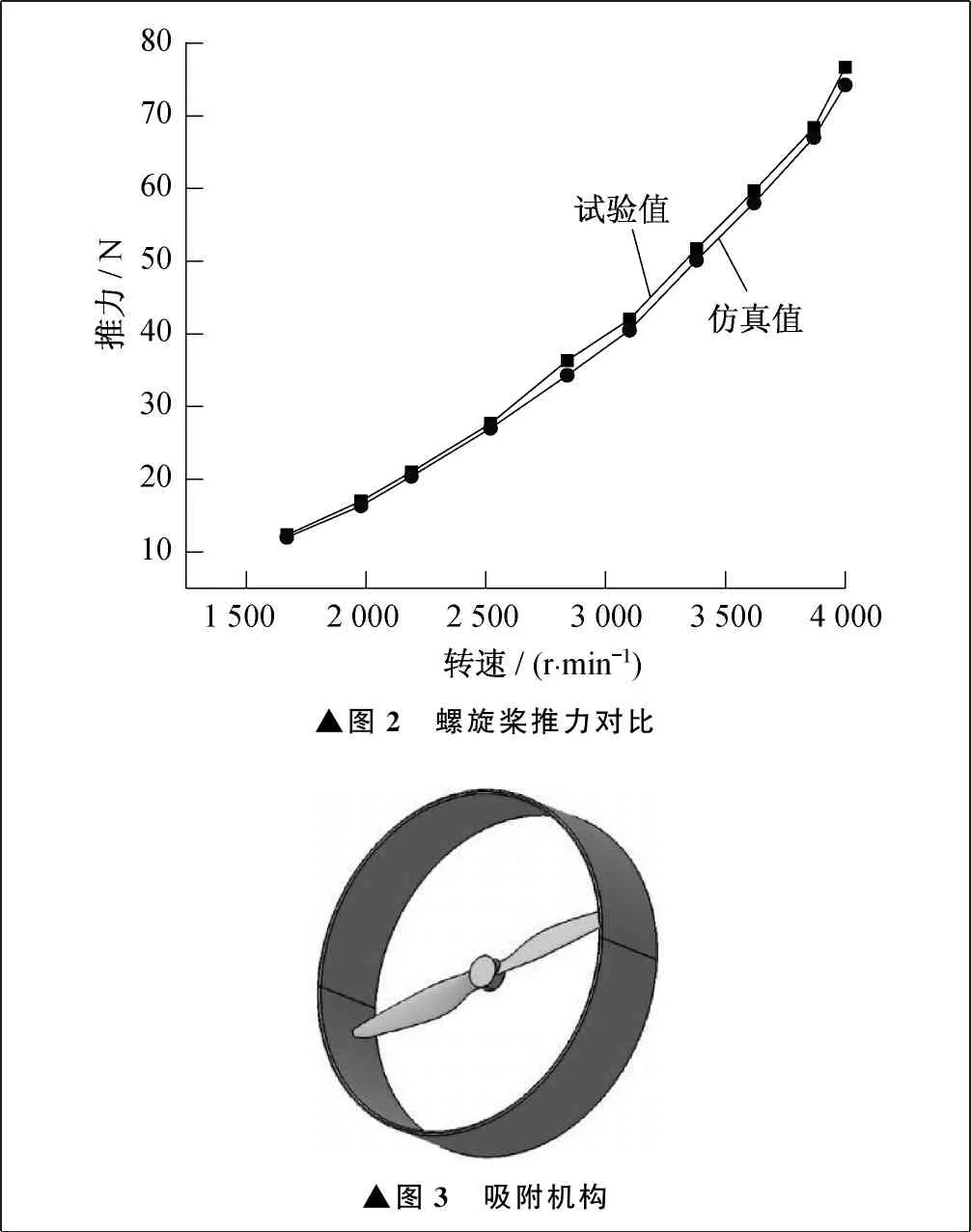
▲圖2 螺旋槳推力對比▲圖3 吸附機構
為了進一步分析多變量多水平對吸附力的影響,考慮壁面機器人的結構參數和工作狀態,筆者應用正交試驗方法進行研究[12]。螺旋槳保護外殼與壁面間隙記為A,螺旋槳保護外殼寬度記為B,螺旋槳轉速記為C。其中,A因素選取110 mm、130 mm、150 mm,B因素選取120 mm、140 mm、160 mm,C因素選取4 000 r/min、4 500 r/min、5 000 r/min。優化因素如圖4所示,選擇L9(34)正交試驗表安排試驗組合,試驗方案及結果見表1[13]。
▲圖4 優化因素
計算流體動力學軟件仿真過程中,在螺旋槳保護外殼內部設置旋轉域,螺旋槳保護外殼被包含在靜止域中。采用布爾運算,將螺旋槳保護外殼表面設置為無滑移的壁面,在吸附裝置入口前部根據試驗安排設置壁面。仿真結果速度矢量如圖5所示。
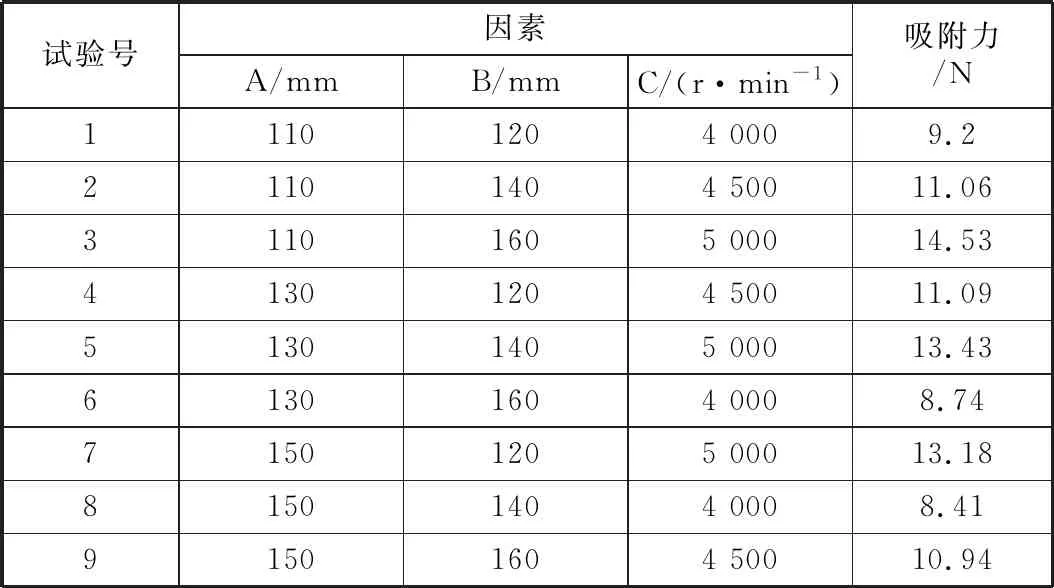
表1 試驗方案及結果
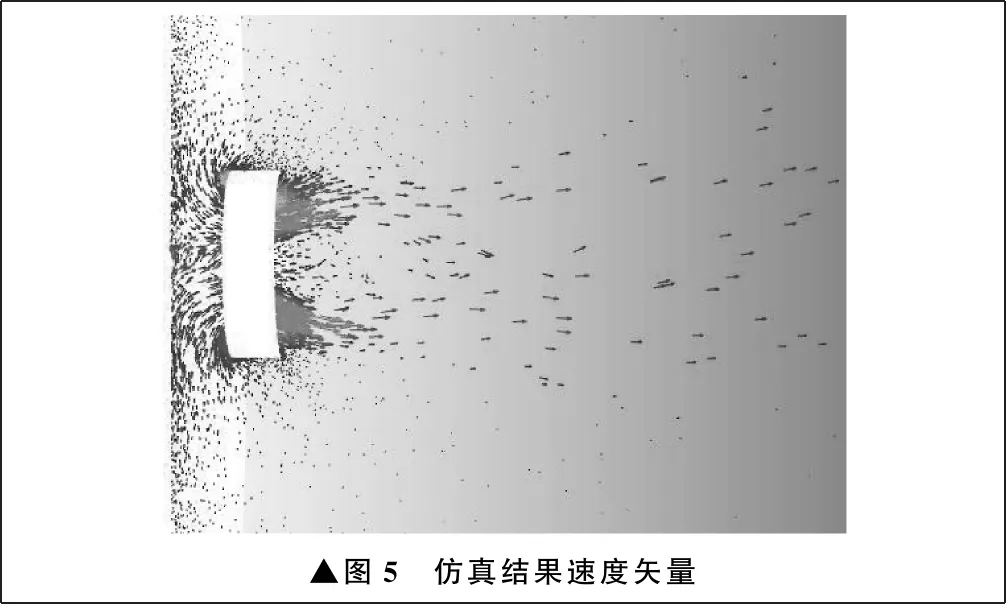
▲圖5 仿真結果速度矢量
根據試驗結果,采用極差分析法對三種因素影響的主次順序和趨勢進行分析[14]。吸附力極差分析結果見表2,其中ki值為對應因素水平的吸附力試驗結果平均值,R為極差值。
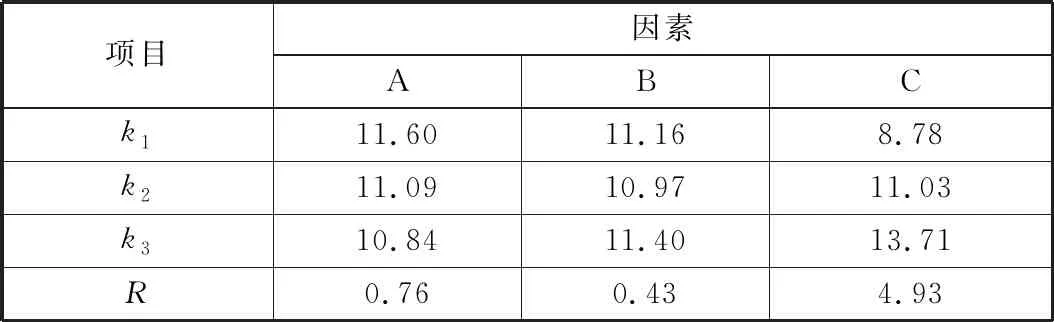
表2 吸附力極差分析 N
由表2可知,影響吸附力大小的各個因素主次順序為螺旋槳轉速、螺旋槳保護外殼與壁面距離、螺旋槳保護外殼寬度。螺旋槳保護外殼與壁面間隙增大,吸附力減小。仿真結果可知,當與壁面距離較小時,螺旋槳保護外殼上產生垂直于壁面的負壓吸附力,且距離越小,負壓吸附力越大,從而使吸附機構產生更大的吸附力。隨著螺旋槳轉速加快,吸附力呈直線增大,表明螺旋槳轉速對吸附力的影響最大。在實際應用中,通過改變螺旋槳轉速調節吸附力是最便捷有效的方法。螺旋槳保護外殼寬度增大,吸附力呈淺V形變化,吸附力增大效果不明顯。考慮螺旋槳保護外殼寬度增大會增大機器人整體的質量,當寬度對吸附力的影響較小時,應盡量減小螺旋槳保護外殼的寬度。基于以上分析,最佳參數組合為螺旋槳保護外殼與壁面距離110 mm、螺旋槳保護外殼寬度120 mm、螺旋槳轉速5 000 r/min。
5 結束語
筆者研究了螺旋槳保護外殼對壁面機器人吸附機構推力的影響,采用計算流體動力學軟件對某款多旋翼螺旋槳進行仿真分析,仿真結果與試驗結果擬合良好,驗證了計算流體動力學軟件仿真方法的正確性。通過正交試驗,分析螺旋槳保護外殼與壁面距離、螺旋槳保護外殼寬度、螺旋槳轉速對壁面機器人吸附機構吸附力的影響。通過試驗結果極差分析,確認試驗因素的重要性次序。兼顧效率和吸附力,得到最佳參數組合,具有參考價值。
