多雷達/聲吶場景下的去相關無偏量測轉換模型
2020-03-03 13:20:44毛艷慧汪躍龍程為彬
現代電子技術 2020年1期
毛艷慧 汪躍龍 程為彬


摘 ?要: 多雷達/聲吶跟蹤場景中,笛卡爾坐標系由于測量轉換過程中依賴相同的估計狀態,不同雷達/聲吶量測轉換的誤差常是相關的。文中充分考慮這一相關性,給出了兩維及三維笛卡爾坐標系下的去相關無偏量測轉換模型,及計算互相關性的解析形式,并采用相對的估計性能評估準則來驗證所提算法的性能。仿真示例表明,考慮互相關后濾波性能明顯優于經典無偏量測轉換方法。
關鍵詞: 目標跟蹤; 非線性量測; 無偏轉換; 雷達/聲吶跟蹤; 去相關; 性能評估
中圖分類號: TN98?34 ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)01?0114?05
Decorrelated unbiased measurement conversion model
for situation of multiple radars or sonars
MAO Yanhui 1, 2, WANG Yuelong1, CHENG Weibin1
Abstract: When tracking with multiple radars or sonars in Cartesian coordinates, the errors of converted measurements are correlated across radar or sonar stations due to their dependency on the same estimation state. In this paper, this cross?correlation is fully considered, a closed form of the cross?covariance across radars or sonars is presented for both 2D and 3D Cartesian coordinates, and the analytical form of cross?correlation is calculated. Two relative estimation performance evaluation metrics are then adopted to illustrate the performance of the algorithm. The simulation results show that the filtering performance of this method considering cross?correlation is obviously superior to the original unbiased conversion in most cases.
Keywords: target tracking; nonlinear measurement; unbiased conversion; radar/sonar tracking; de?correlation; performance assessment
0 ?引 ?言
在跟蹤問題中,傳感器常提供目標在傳感器坐標下的量測(三維中為球坐標,二維中為極坐標),而目標的運動常在笛卡爾坐標中進行[1]。一個自然且常用的方法是把量測模型從傳感器坐標系轉換到笛卡爾坐標系中,進而可以在笛卡爾坐標系中應用卡爾曼濾波器進行跟蹤[2?6]。
量測模型轉換方法很多。現有的經典方法[7]是在一定徑向距離?角度測量誤差范圍內,進行量測轉換,但給出的是有偏且不一致的估計[8]。文獻[7]通過對轉換后的量測加上一個偏差補償,提出一種去偏差的量測轉換方法。文獻[9]利用經典量測轉換方法中偏差的乘性本質,通過給轉換后的量測乘上一個因子,提出乘法形式的無偏轉換方法(Unbiased Conversion of Measurement Model,UCM)。文獻[10]指出文獻[9]中轉換后量測噪聲的均值和協方差存在相容性問題,并給出了修正。
通常在傳感器坐標下(即三維球坐標和二維極坐標),傳感器間的量測噪聲是獨立不相關的。但由于轉換后的量測依賴于狀態,各傳感器間轉換后的量測誤差將彼此相關[11?12]。這一相關性對提高多傳感器跟蹤性能有很大幫助。在多傳感器場景下,針對如何計算這一相關性并提高跟蹤性能的問題,本文首先分析了原始無偏量測轉換算法在多傳感器情況下的缺陷;接著,基于此分析,給出了二維和三維笛卡爾坐標下考慮互相關性的解析形式。
對估計算法的性能評估,廣泛應用的均方根誤差度量(Root Mean Square Error,RMSE)有一定缺陷,最為明顯的是它受大的誤差主導[11]。因為幾何均值既不受大的誤差值主導也不受小的誤差值主導,文獻[12]中推薦使用幾何均值,以得到一個較為公正的評估結果。但由于均方根誤差和幾何均值沒有相對的參考量,只是絕對度量誤差各自意義上的平均值,所以對場景敏感[13]。如,估計誤差[x=1]對估計量[x=100]是1%,而對估計量[x=2]是50%,若僅僅用絕對誤差度量是不公平的。基于幾何均值的相對度量,貝葉斯估計誤差商(Bayesian Estimation Error Quotient,BEEQ)更適合比較帶有不同先驗信息或數據的估計器,可給出更好的評估結果[14?15]。
本文采用BEEQ和EMER來評估考慮互相關后相對于先驗信息和量測數據的改進,仿真結果表明考慮互相關性后的無偏量測轉換方法在大多數情況下明顯優于原始的無偏量測轉換方法,清楚地揭示了考慮這一互相關的重要性。
1 ?問題描述
在多雷達/聲吶場景下,二維極坐標時,其量測信息包括目標的徑向距離和方位角。傳感器坐標中的徑向距離和方位角分別為:
[rlm=r+vlrβlm=β+vlβ, ? ? l=i,j] (1)
式中:[r,β]分別為目標真實的徑向距離和方位角;上標[l]代表第[l]個傳感器;[vlr,vlβ]分別為第[l]個傳感器的量測噪聲,且彼此獨立,均值為零,方差分別為[σ2r,σ2β]。
三維球坐標時,量測的徑向距離、方位角和俯仰角分別為:
[rlm=r+vlrβlm=β+vlβ, ? ? l=i,jεlm=ε+vlε] (2)
式中:[r,β,ε]分別為目標真實的徑向距離、方位角和俯仰角;[vlr,vlβ,vlε]分別為第[l]個傳感器的量測噪聲,且彼此獨立,均值為零,方差分別為[σ2r,σ2β,σ2ε]。
基于上述方程,要解決的問題是如何在笛卡爾坐標中充分利用傳感器坐標轉換過來的量測信息,精確估計目標的真實位置。
2 ?考慮互相關時的無偏量測轉換
2.1 ?經典的無偏量測轉換方法
以二維情況為例,通過極坐標到笛卡爾坐標的轉換,第[l]個雷達的轉換量測為:
[xlmylm=rlmcos βlmrlmsin βlm] (3)
若方位角噪聲[vlβ]概率密度函數關于[y]軸對稱,對式(3)取期望得到:
[Εxlmylm=λβrcos βλβrsin β] (4)
式中[λβ=Εcos vlβ]。假定[λβ≠0],UCM提出的無偏轉換為:
[xu,lmyu,lm=λ-1βrlmcos βlmλ-1βrlmsin βlm] (5)
量測模型可重寫為:
[xu,lm=x+xu,lm-xyu,lm=y+yu,lm-y] (6)
轉換后的量測誤差為:
[xu,lm=xu,lm-xyu,lm=yu,lm-y] (7)
測量噪聲協方差為:
[Rlp=covxu,lmyu,lmrlm,βlm=R11,lpR12,lpR21,lpR22,lp] ? (8)
經典的無偏轉換方法給出:
[R11,lp=varxu,lmrlm,βlm=(λ-2β-2)(rlm)2cos2βlm+12[(rlm)2+(σlr)2](1+λ′βcos 2βlm)R22,lp=varyu,lmrlm,βlm=(λ-2β-2)(rlm)2sin2βlm+12[(rlm)2+(σlr)2](1-λ′βcos 2βlm)R12,lp=covxu,lm,yu,lmrlm,βlm=(λ-2β-2)(rlm)2sin βlmcos βlm+12[(rlm)2+(σlr)2]λ′βsin 2βlm] (9)
式中:[λβ=Ecos vlβ;λ′β=Ecos 2vlβ]。
經典的UCM方法因為只考慮單部雷達的量測轉換后的協方差,忽略了雷達之間的互相關性,因此應用于多雷達系統時,無法保證估計的無偏性和精確性,僅僅適用于單個雷達的場景。
2.2 ?多傳感器時UCM的性能分析
用多個傳感器進行跟蹤時,轉換后的量測誤差不同傳感器間是互相關的。在多傳感器時,如果忽略了這種相關性,濾波器性能很有可能發散。一個可行的方法是把所有來自多傳感器轉換后的量測疊起來形成一個向量,然后考慮轉換量測誤差間的互相關性,使用中心式融合進行濾波。
給定來自傳感器[i,j]的量測[zim,zjm],轉換后的量測誤差記為[eu,im=xu,imyu,im′],[eu,jm=xu,jmyu,jm′]。將兩個誤差疊起來得到[eu,im′,eu,jm′′],然后記[R]為增廣的協方差矩陣:
[R=RipRi,jRi,jTRjp] (10)
其對角塊可以通過式(9)計算得到。非對角塊在下節進行推導。
2.3 ?互相關性的推導
由于單傳感器情況下真實的協方差依賴于目標真實的徑向距離和真實的俯仰角,這在現實中常常是得不到的。在式(9)中,UCM是直接基于觀測給出的[Rlp],為了與對角塊[Rip,Rjp]一致,本文非對角塊[Ri,j]推導仍然基于觀測。
2.3.1 ?二維情況下互相關性的推導
給定來自傳感器[i,j]的兩個無偏轉換量測[zu,im,zu,jm],記[R]非對角塊為[Ri,j=r11r12r21r22],于是有:
[r11=cov(xu,im,xu,jmrim,βim,rjm,βjm)=Eλ-1βrimcos βim-(rim-vir)cos(βim-viβ)[λ-1βrjmcos βjm-(rjm-vjr)cos(βjm-vjβ)]rim,βim,rjm,βjm=λ-2βrimrjmcos βimcos βjm-rimrjmcos βimcos βjm-rimrjmcos βjmcos βim+λ2βrimrjmcos βimcos βjm=(λ-1β-λβ)2rimrjmcos βimcos βjm ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (11)]
類似的,可得:
[r12=cov(xu,im,yu,jmrim,βim,rjm,βjm)=(λ-1β-λβ)2rimrjmcos βimsin βjmr21r21=cov(yu,im,xu,jmrim,βim,rjm,βjm)=(λ-1β-λβ)2rimrjmsin βimcos βjmr22=cov(yu,im,yu,jmrim,βim,rjm,βjm)=(λ-1β-λβ)2rimrjmsin βimsin βjm] ? ? ? ?(12)
簡單起見,這里假設量測噪聲[vlr,vlβ],[l=i,j]有相同的統計量,即[E[vir]=E[vjr]=0],[var(vir)=var(vjr)=σ2r],但可直接推廣到非同分布的情況。
明顯地,若[λβ≠0],擴展后協方差陣的非對角塊明顯非零。條件[λβ≠0]對單峰和[[-a,a](a<π)]上均勻分布的情況是合理的[4]。
多雷達/聲吶傳感器場景下進行跟蹤時,濾波中同時用到式(10)~式(12)。直觀上,考慮互相關性后,應用了更多有效信息,相較經典的無偏轉換方法跟蹤性能的改進,將在仿真部分進行驗證。
2.3.2 ?三維情況下互相關性的推導
三維情況下的無偏轉換為:
[xu,lm=λ-1βλ-1εrlmcos εlmcos βlmyu,lm=λ-1βλ-1εrlmcos εlmsin βlmzu,lm=λ-1εrlmsin εlm] (13)
三維情況下的[Ri,j]可以類似得到:
[r11=(λ-1βλ-1ε-λβλε)2rimrjmcos εimcos βimcos εjmcos βjmr12=(λ-1βλ-1ε-λβλε)2rimrjmcos εimcos βimcos εjmsin βjmr13=(λ-1βλ-2ε-λβ-λ-1β+λβλ2ε)rimrjmcos εimcos βimsin εjmr21=(λ-1βλ-1ε-λβλε)2rimrjmcos εimsin βimcos εjmcos βjmr22=(λ-1βλ-1ε-λβλε)2rimrjmcos εimsin βimcos εjmsin βjmr23=(λ-1βλ-2ε-λβ-λ-1β+λβλ2ε)rimrjmcos εimsin βimsin εjmr31=(λ-1βλ-2ε-λβ-λ-1β+λβλ2ε)rimrjmsin εimcos βjmcos εjmr32=(λ-1βλ-2ε-λβ-λ-1β+λβλ2ε)rimrjmsin εimsin βjmcos εjmr33=(λ-1ε-λε)2rjmrjmsin εimsin εjm] (14)
式中:[λβ=E(cos vlβ)];[λε=E(cos vlε)]。
三維情況下擴展后的協方差矩陣,明顯地,若[λβ≠0],擴展后協方差陣的非對角塊明顯非零。亟需考慮多雷達/聲吶間互相關信息。
3 ?性能評估準則
3.1 ?貝葉斯估計誤差商
BEEQ是用來評估貝葉斯估計的一種相對度量[7]。對于動態的估計器,它刻畫了估計精度相對于預測估計的改進,對參數估計器可以理解為估計[x]相對于先驗[x]的改進。其定義為:
[r*(x)=AEE(x)AEE(x)=i=1Mxi-xii=1Mxi-xi] ?(15)
式中:[M]為總的蒙特卡洛次數;[xi,xi]為第[i]次蒙特卡洛實驗的待估量和估計量;[xi]為第[i]次蒙特卡洛實驗的先驗均值或者預測值。
3.2 ?均方根誤差度量
目前工程中廣泛應用的性能評估指標為均方根誤差(RMSE),其具體定義為:
[RMSE(x)=1Mi=1Mxi212] ? ? (16)
式中:[M]為蒙特卡洛實驗次數;[i]表示第[i]次蒙特卡洛實驗;記[x,x]為待估量和估計量;估計誤差[x=x-x];[xi=x′ixi12]。
4 ?仿真示例及結果分析
RMSE和GAE因為沒有任何的參考量,所以都是絕對的度量,即使是對同一場景,它們對先驗信息和數據精確度都表現敏感。而相對的誤差度量比絕對的度量更能揭示內在的誤差性能。采取BEEQ和EMER分別來評估不同的先驗信息和數據,[x]相對于[x]和[x]的精度提高。針對不同的應用場景來比較考慮互相關性后的量測轉換算法對估計性能的提高。仿真部分用UCM?C表示本文提出的考慮互相關后的無偏量測轉換算法,用UCM表示原始的無偏量測轉換算法。
傳感器坐標中量測為:
[rmβm=h(x)+v=x2+y2arctanyx+vrvβ] (17)
式中[x=[x,y]]表示目標在笛卡爾坐標系中的真實位置。假設[vr,vβ]為零均值的高斯噪聲,彼此獨立,方差分別為[σ2r,σ2β],[x,y=[-5 000,20 000],σr=100] m。
4.1 ?場景一:方位角測量誤差[σβ=0.1]
在這一場景中,方位角測量誤差[σβ=0.1]。如圖1所示,UCM?C的性能顯著優于UCM。在傳感器坐標中角度測量誤差變大的情況下,帶有噪聲的角度測量將導致轉換量測誤差間的強相關,因為因子[(λ-1β-λβ)2]進一步變大。UCM完全無視這種相關性,本文提出的UCM?C考慮了這種相關性。在此場景下,即使[α]增大到了10,二者性能之間的差別仍然存在。
UCM?C的BEEQ曲線從1變到了0.4,這表明此場景中,隨著傳感器量測精度的變差,數據的貢獻變小了。盡管如此,UCM的BEEQ曲線在[α]大于5之前,其值都大于1。而UCM?C的BEEQ曲線一直低于1。與場景一相比,兩種算法的RMSE曲線顯著增大到了300。
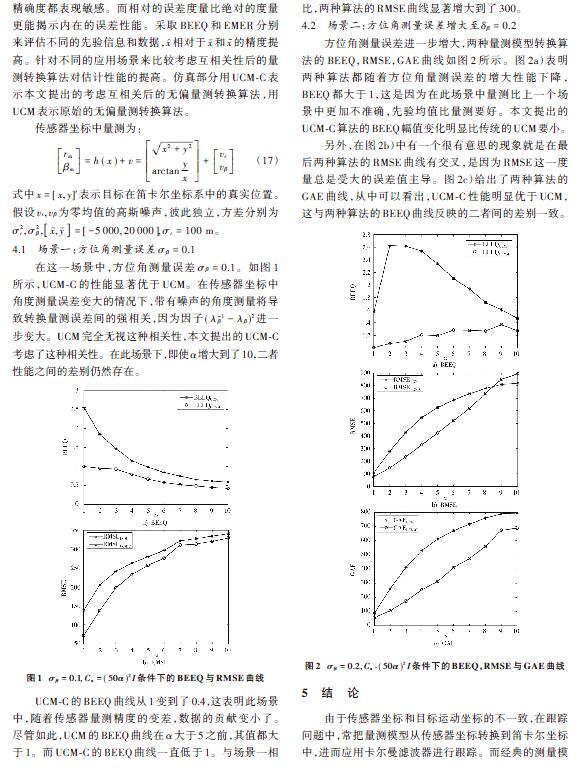
4.2 ?場景二:方位角測量誤差增大至[δβ=0.2]
方位角測量誤差進一步增大,兩種量測模型轉換算法的BEEQ,RMSE,GAE曲線如圖2所示。圖2a)表明兩種算法都隨著方位角量測誤差的增大性能下降,BEEQ都大于1,這是因為在此場景中量測比上一個場景中更加不準確,先驗均值比量測要好。本文提出的UCM?C算法的BEEQ幅值變化明顯比傳統的UCM要小。
另外,在圖2b)中有一個很有意思的現象就是在最后兩種算法的RMSE曲線有交叉,是因為RMSE這一度量總是受大的誤差值主導。圖2c)給出了兩種算法的GAE曲線,從中可以看出,UCM?C性能明顯優于UCM,這與兩種算法的BEEQ曲線反映的二者間的差別一致。
5 ?結 ?論
由于傳感器坐標和目標運動坐標的不一致,在跟蹤問題中,常把量測模型從傳感器坐標轉換到笛卡爾坐標中,進而應用卡爾曼濾波器進行跟蹤。而經典的測量模型轉換方法忽視了轉換后量測誤差之間的相關性,本文在分析經典的模型轉換量測方法在多傳感器場景中的局限性后,給出了二維和三維笛卡爾坐標下考慮互相關性的解析形式。仿真結果表明,考慮互相關性后的無偏量測轉換方法在大多數情況下明顯優于經典的無偏量測轉換方法。
參考文獻
[1] LI X R, JILKOV V P. A survey of maneuvering target tracking—part III: measurement models [C]// Proceedings of SPIE Confe?rence on Signal and Data Processing of Small Targets. San Diego, CA, USA: [s.n.], 2001: 423?446.
[2] WANG W, LI D, JIANG L. Best linear unbiased estimation algorithm with Doppler measurements in spherical coordinates [J]. Journal of systems engineering and electronics, 2016, 27(1): 128?139.
[3] ZHOU G J, GUO Z K, CHEN X, et al. Statically fused converted measurement Kalman filters for phased?array radars [J]. IEEE transactions on aerospace and electronic systems, 2018, 54(2): 554?568.
[4] BORDONARO S, WILLETT P, BAR?SHALOM Y. Consistent linear tracker with converted range, bearing and range rate measurements [J]. IEEE transactions on aerospace and electronic systems, 2017, 53(6): 3135?3149.
[5] 林海濤,鐘海俊,王斌,等.基于相關濾波的目標快速跟蹤算法研究[J].現代電子技術,2018,41(2):21?25.
[6] 陳士超,劉明,盧福剛,等.基于稀疏描述的SAR目標方位角估計算法[J].現代電子技術,2017,40(12):132?135.
[7] LERRO D, BAR?SHALOM Y. Tracking with debiased consistent converted measures vs. EKF [J]. IEEE transactions on aerospace and electronic systems, 1993, 29(3): 1015?1022.
[8] MO L B, SONG X Q, ZHOU Y Y, et al. Unbiased converted measurements for tracking [J]. IEEE transactions on aerospace and electronic systems, 1998, 34(3): 1023?1027.
[9] DUAN Z S, HAN C Z, LI X R. Comments on unbiased converted measurements for tracking [J]. IEEE transactions on aerospace and electronic systems, 2004, 40(4): 1374?1377.
[10] LI X R, ZHI X R, ZHANG Y M. Multiple?model estimation with variable structure—Part III: model?group switching algorithm [J]. IEEE transactions on aerospace and electronic systems, 1999, 35(1): 225?241.
[11] BLACKMAN S S. Multiple target tracking with radar applications [M]. [S. l.]: Artech House, 1986.
[12] LI X R, ZHAO Z L. Evaluation of estimation algorithms part I: incomprehensive measures of performance [J]. IEEE transactions on aerospace and electronic systems, 2006, 42(4): ?1340?1358.
[13] ZHAO Z L, LI X R, ZHU Y M. Interaction between estimators and estimation criteria [C]// 2005 7th International Conference on Information Fusion. Philadelphia, PA, USA: IEEE, 2005: 6.
[14] LI X R, ZHAO Z L, DUAN Z S. Error spectrum and desira?bility level for estimation performance evauation [C]// Procee?dings of Workshop on Estimation, Tracking and Fusion: A Trbute to Fred Daum. CA, USA: [s.n.], 2007: 556?563.
[15] ZHAO Z L, LI X R. Two classes of relative measures of estimation performance [C]// 2007 10th International Conference on Information Fusion. Quebec, Que., Canada : IEEE, 2007: 1?7.
作者簡介:毛艷慧(1982—),女,博士后,講師,主要研究方向為狀態估計、目標跟蹤。
汪躍龍(1965—),男,教授,主要研究方向為智能控制、導向鉆井井下控制技術。
程為彬(1970—),男,教授,主要從事載體姿態測量方向研究。
