一種新型自動化藍莓采摘機的設計*
2020-03-03 06:11:14
機械制造 2020年2期
淄博職業學院 國際學院 山東淄博 255314
1 設計背景
藍莓果樹是21世紀具有發展潛力的種植樹種,目前我國具有大面積的藍莓果樹種植基地。大小興安嶺地區藍莓果樹種植面積約1 633 km2,產量達270 000 t,占全國藍莓總產量的90%[1-2]。在藍莓果樹的種植產業鏈中,藍莓采摘是最耗時、最費力的環節。由于藍莓具有果實小、產量高、季節性強等特點,采摘屬于勞動密集型工作,需要投入大量的人力和物力。
發達國家對藍莓的采收作業基本實現機械化,收獲效率高,成本低。機械化采收效率比人工采收效率提高約60倍,并減少約85%的采收成本[3]。我國藍莓的采收主要為人工采收,勞動強度大,采收效率低,采收成本高,破損率高。由于藍莓等小漿果成熟期較短,人工采收的低效率會造成小漿果實浪費,經濟損失嚴重[4]。
國內關于藍莓采摘機械方面的研究相對較少,現有的藍莓采摘機分為牽引式藍莓采收機、氣吸式藍莓采收機[5]。牽引式采收的缺點是穩定性不高,容易出現果樹劃傷、果實破損現象,且對操作者的操作水平依賴性強[6]。氣吸式采收的缺點是采收效率低,對果實損傷較大[7]。因此,國內市場迫切需要一款高效快捷的藍莓采摘機械來滿足藍莓的現場采收作業要求。
對此,筆者研制了一種新型自動化藍莓采摘機,以旋轉、振動的塑膠棒作為采摘系統核心部件,由可編程序控制器(PLC)控制行走路線,以改善采摘系統工作性能,為藍莓采摘機械設計提供參考。
2 整機結構
自動化藍莓采摘機整機結構如圖1所示,主要由收攏板、框架、行走機構、控制系統、傳動機構、旋轉與振動塑膠棒、輸送裝置等部件組成。

▲圖1 自動化藍莓采摘機整機結構
3 工作原理
在藍莓采收作業時,自動化藍莓采摘機騎壟作業向前行駛,藍莓植株經過收攏板進入框架內。控制系統驅動行走機構、輸送裝置運行,根據采摘作業要求單獨驅動采摘機構的工作部件塑膠棒旋轉、振動,拍打經過的藍莓植株,從而實現藍莓果實的自動化采摘。自動化藍莓采摘機行走路徑如圖2所示,采摘原理如圖3所示。

▲圖2 自動化藍莓采摘機行走路徑▲圖3 自動化藍莓采摘機采摘原理
4 設計方案
為有效降低藍莓采摘成本,提高采摘率,減小對植株和果實的損傷,需要在設計時考慮以下因素。
(1) 在采摘時需要對采摘路徑進行規劃,需要考慮采摘機整體尺寸與藍莓植株尺寸、植株間距離、壟距間安全距離等因素,以免采摘機刮傷植株。
(2) 采摘機采摘機構的主要部件塑膠棒、收集板,盡量都選用彈性較好的材料,最大程度減小機械沖擊影響,以減小對果實和果樹的損傷。
綜合以上采摘因素,在保證采摘效率的同時,還要保證果實采摘質量,主要包括未成熟果實采摘率、果實采摘破損率和成熟果實未采摘率。對比國內外藍莓采摘機械,筆者設計的自動化藍莓采摘機主要采摘技術指標為采凈率不低于85%,損傷率不高于5%[8-10]。
PLC作為采摘機控制系統核心,控制電機分別驅動輸送裝置、行走機構、塑膠棒等。輸送裝置由皮帶、滾軸、電機組成。行走機構采用前驅設計,由橡膠輪、十字軸、電機等組成。塑膠棒采用直徑為3 mm的軟質尼龍棒制作,轉動由電機控制,采用間歇機構驅動塑膠棒上下振動,頻率范圍為1~4 Hz。為保證藍莓植株向采摘機行走的反方向傾斜,采用風力加載。應用Unigraphics軟件進行數字化樣機制作,如圖4所示。

▲圖4 自動化藍莓采摘機數字化樣機
5 控制方案
采摘機的控制系統包括PLC、繼電器、按鈕開關、固定控制器、電位器、變壓器、毛刷調速器、開關電源等,可以實現控制行走、轉向、輸送等驅動電機的正反轉。為方便控制采摘機,設計電機調速電路,通過外部旋鈕開關調節驅動電機的轉矩,實現行走、輸送,以及塑膠棒旋轉速度和力度的調節。轉矩調節電路如圖5所示,控制系統線路如圖6所示。
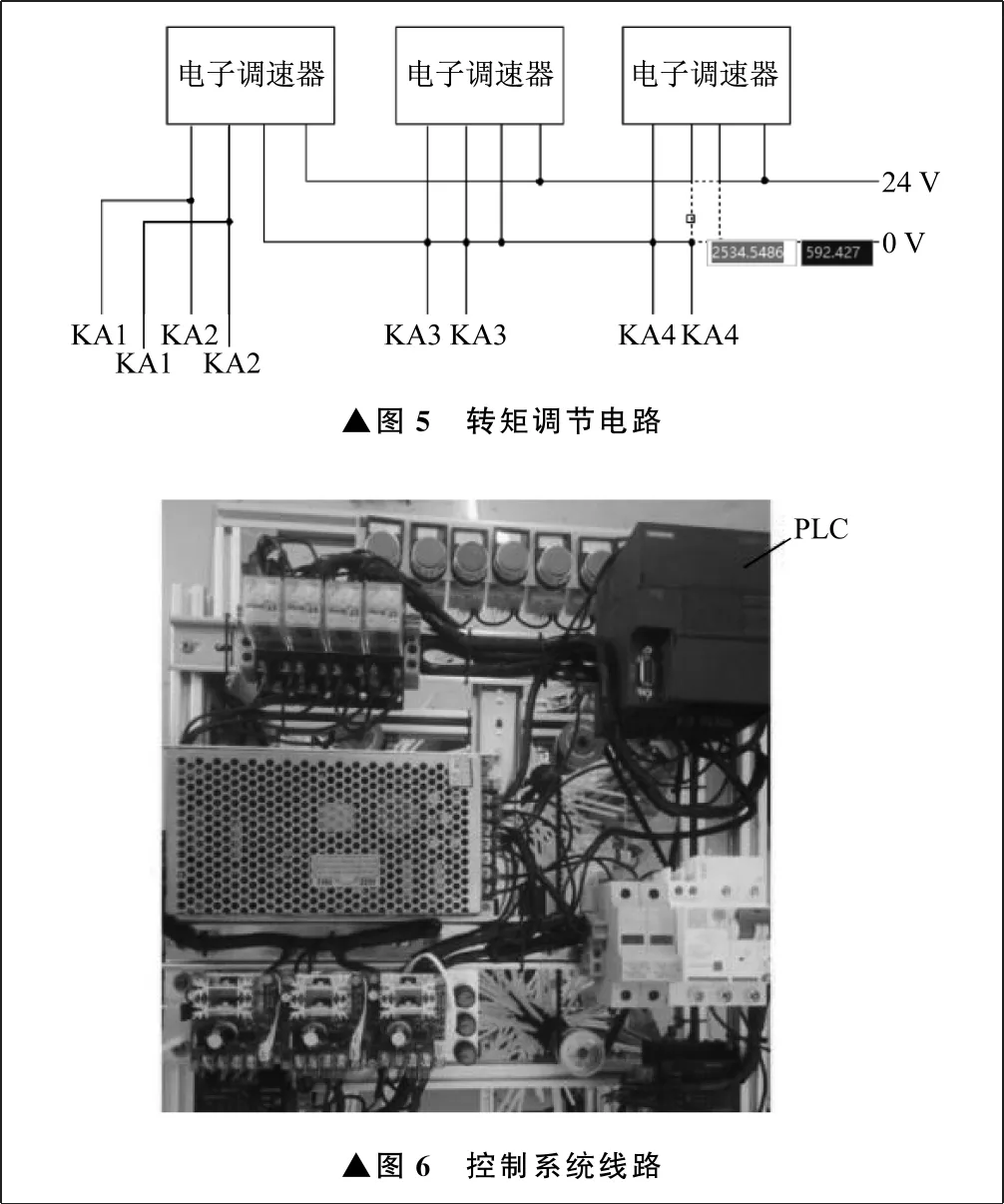
▲圖5 轉矩調節電路▲圖6 控制系統線路
6 樣機制作
筆者在研究分析藍莓植株形態結構、振動能耗的基礎上,根據國內引進種植藍莓植株生長形態和種植規范,設計了新型自動化藍莓采摘機。對采摘裝置控制系統進行設計、調試,對旋轉與振動塑膠棒、采摘機行走機構和框架等進行結構設計,并對動力元件、調速器等進行選型,制作藍莓采摘機樣機。 圖7所示為自行研制開發的新型自動化藍莓采摘樣機。

▲圖7 自動化藍莓采摘機樣機
通過彈性塑膠棒的旋轉、整體上下振動,使藍莓脫落,并由收集板收集到輸送裝置,如圖8所示。風力加載裝置將輸送帶上的藍莓與樹葉分離,并將藍莓輸送到收集器中。動力采用綠色能源鋰電池供電,并裝有多組備用電池來保證續航能力。

▲圖8 采集示意圖
7 試驗結果分析
采摘機主要應用機械系統產生的振動與風力將果實與枝條分離,對其進行現場采摘試驗。在試驗過程中,收集箱中可見非成熟果實、成熟果實和樹葉。按照采摘的技術指標,對比不同采摘方式,效果如圖9所示。由圖9可知,人工采摘單人效率為3.5 kg/h,新型采摘機效率為40 kg/h;人工每采摘40 kg需要12 h,新型采摘機只需要1 h;傳統采摘機采摘的破損率為50%,新型采摘機采摘的破損率僅為5%。
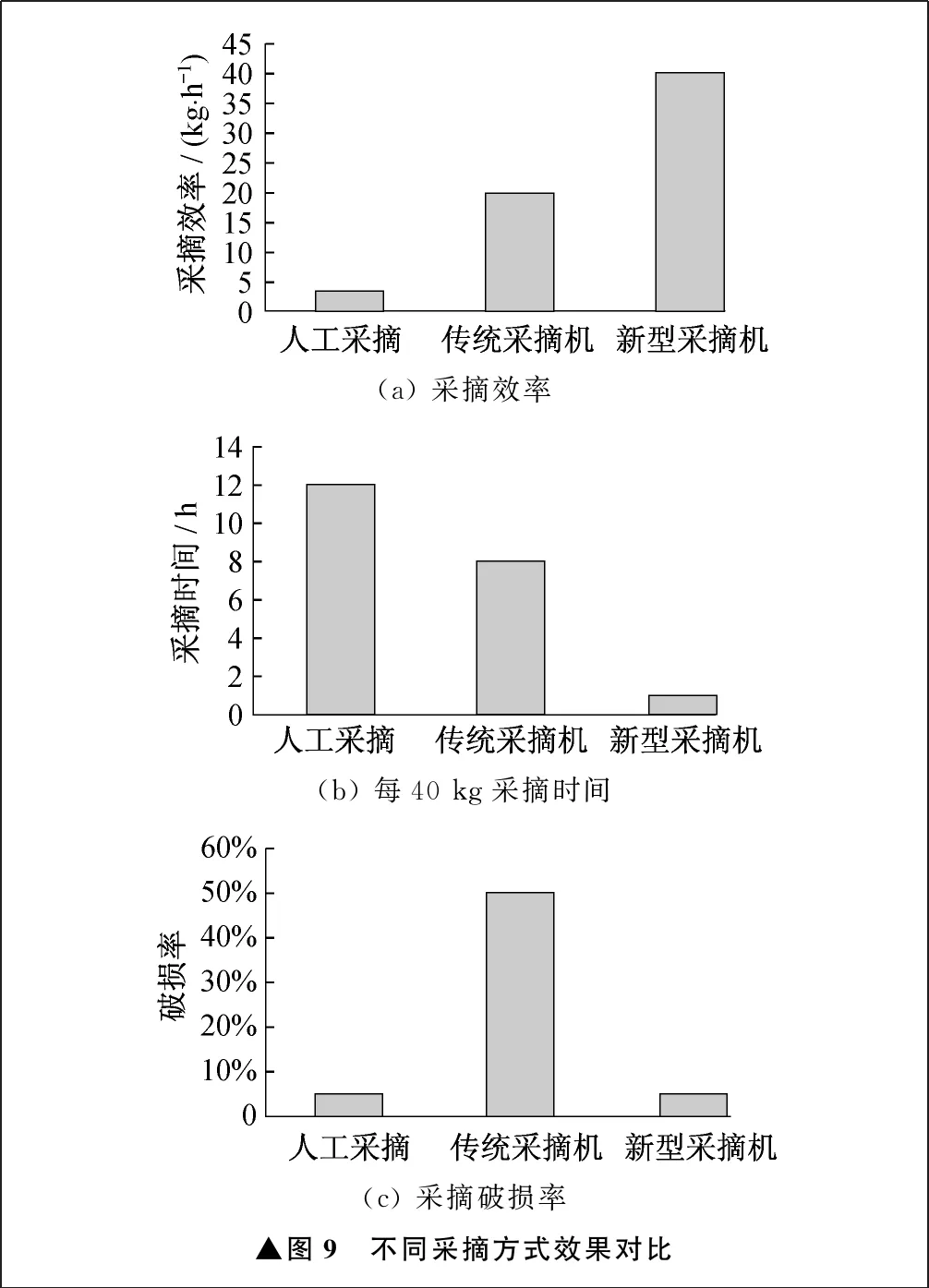
(a) 采摘效率(b) 每40 kg采摘時間(c) 采摘破損率▲圖9 不同采摘方式效果對比
8 結束語
根據自動化藍莓采摘機自身特點和試驗結果分析,所設計的新型自動化藍莓采摘機有效降低了藍莓采摘成本,提高了采摘率,并減小了對植株的劃傷和對果實的損傷。
在進行藍莓采摘作業時,采摘機的行走路線以直線為主,大角度轉向情況較少,可以應用電動助力轉向系統。
采摘機的工作部件塑膠棒、框架、收攏板等盡量選用彈性較好的材料,最大程度減小機械沖擊影響,以減小對果實和果樹的損傷。
盡量減小果實跌落高度或改善收集板、輸送裝置的表面材料,避免對藍莓果實造成損傷。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
甘肅教育(2020年14期)2020-09-11 07:57:42
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
