礦井提升機變頻調速控制系統的優化設計
2020-03-03 03:21:04楊騰飛
江西煤炭科技 2020年1期
楊騰飛
(山煤集團煤業管理有限公司,山西 太原,030006)
1 概述
伴隨著礦井井型的增大和產能的提高,對礦井提升機的可靠性也提出了更高的要求[1]。礦井提升機若出現超速、過卷、過放等問題,會嚴重影響礦井正常的安全生產,甚至人員的人身安全[2]。對礦井提升機的控制系統進行研究設計,從而保證礦井提升機運行的穩定性和可靠性,對于礦井安全高效生產的實現具有積極的現實意義。
2 礦井提升機變頻調速控制系統硬件設計
2.1 控制系統總體設計
對于礦井提升機而言,其最為重要的控制功能是通過主控制單元來實現的。通過主控制單元可以對礦井提升機的傳動、信號、上位機等設備的工況系統實時監控,并對其發出的各種數據信號進行分析處理,以此來保證礦井提升機的正常運轉。嵌入式處理器具備設備可靠、易于編程、調試簡便等優點,特別是ARM嵌入式處理器因具有優異的產品性能、較低的使用能耗、簡易的編程開發以及高度的運行可靠,而被廣泛地應用于工業控制領域[3]。因此,本次設計將LPC2131型ARM嵌入式處理器應用于礦井提升機控制系統當中。
LPC2131型ARM嵌入式處理器,是由世界著名的飛利浦公司開發生產的一款由ARM公司授權的32 位嵌入式處理器。該型處理器是以John von Neumann結構的ARM7TDMI-S內核為基礎的,通過三級流水線進行運算處理,并且采用16位指令長度的Thumb結構化策略,對于有限的儲存容積、復雜的數據密度等情況十分適用。
2.2 變頻調速控制方案
本次礦井提升機變頻調速控制方案,是通過改變輸入電路的頻率,進而改變電機的轉速快慢,從而達到礦井提升機變頻調速的目的。整個變頻調速電路將運用交—直—交的轉換電路來實現電機的變頻調,整個電路系統包括整流、中間直流以及逆變三部分電路。其中輸入電路系統的是三相工頻交流電,而后通過不可控整流、PWM逆變可以得到具有不同頻率的交流電,針對電能處理主要由交—直、直—分轉換兩個部分組成。礦井提升機變頻調速主回路控制電路見圖1。
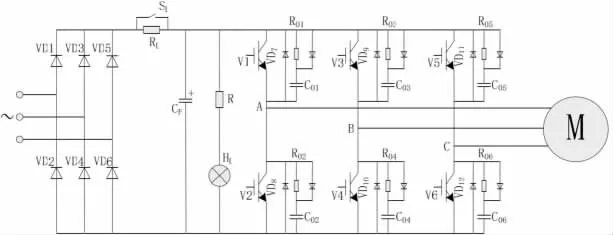
圖1 變頻調速主回路控制電路
2.3 變頻控制系統設計
鑒于礦井提升機實際變頻控制系統使用需求,根據相關硬件設計規則,對礦井提升機變頻控制系統進行硬件設計。礦井提升機變頻控制系統硬件設計見圖2。
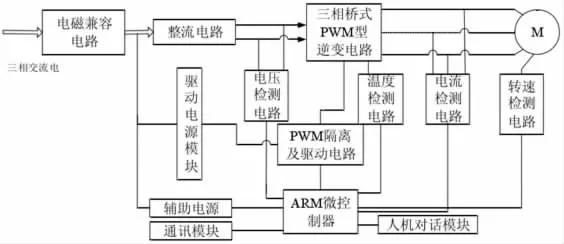
圖2 變頻控制系統硬件設計
礦井提升機變頻控制系統硬件設計是由主回路(上半圖)和控制回路(下半圖)所組成,見圖1。其中,控制回路圍繞LPC2131型ARM嵌入式處理器進行矢量運算、處理信號等來實現控制功能的。
2.4 變頻控制系統驅動電路
由于IGBT(即絕緣柵雙極型晶體管)必須配備具有正方向電壓的供電系統、能夠及時開關、具有保證整個電路正常運行的電壓電流幅值以及良好的抗干擾性能。據此本次設計選用了IR2233型驅動芯片,該型芯片能夠滿足三相電動機的驅動使用需求,在電路故障或者欠壓等異常情況下,能夠及時將6個輸出端口關閉避免造成事故。礦井提升機變頻控制系統驅動電路見圖3。
2.5 變頻控制系統監測電路
(1)變頻控制系統電流監測電路
通過定子電流監測設備可以對整個控制系統的矢量精度進行實時監測控制,即對流經驅動電機的三相定子的電流信號進行監測,并通過處理器AD將電流信號轉變為數字信號,進而運用后續處理程序對數字信號進行分析處理。本次設計采用了TBCDS-06型傳感器,通過OP07放大器電路對電流信號進行放大收集。礦井提升機變頻控制系統電流監測電路設計見圖4。
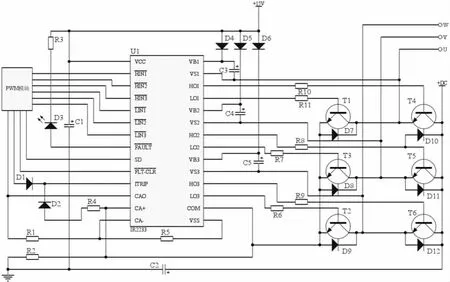
圖3 變頻控制系統驅動電路

圖4 變頻控制系統電流監測電路
(2)變頻控制系統電壓監測電路
通過并聯電阻方法可以實現對礦井提升機變頻控制系統的電壓進行監測,再綜合采用分壓電阻方法對礦井提升機變頻控制系統的輸出電壓進行監測,礦井提升機變頻控制系統電流監測電壓電路見圖5。

圖5 變頻控制系統電壓監測電路
(3)變頻控制系統速度監測電路
通過變頻控制系統速度監測電路可以實現對速度閉環和轉子磁鏈進行實時監測,其中將旋轉編碼器布置于電機轉軸上,作為速度監測電路的監測元件,對電機運行當中轉軸的角位置和轉速進行脈沖編碼。本次設計采用了歐姆龍自動化公司生產的E6B2型編碼器,對礦井提升機驅動電機的速度進行監測控制,以符合保證礦井提升機安全正常使用的要求。礦井提升機變頻控制系統速度監測電路見圖6。

圖6 變頻控制系統速度監測電路
(4)變頻控制系統溫度監測電路
通過變頻控制系統速度監測電路,可以實現對電路中逆變模塊、驅動電機運行時溫度的實時監測。本次設計采用了4組LM75型溫度傳感器,該型溫度傳感器能夠對-55℃~125℃范圍內的溫度進行實時監測,可以通過通過3.3V的直流電源直接為其進行供電。礦井提升機變頻控制系統溫度監測電壓電路見圖7。

圖7 變頻控制系統溫度監測電路
(5)變頻控制系統過流保護電路
將電流霍爾傳感器應用到整個電路設計當中,該傳感器兼具線性度、完全隔離采集端以及非接觸測試等優勢。在發生過流現象中,OCURR端則會發生低電平現象,ARM處理器將會相應地發出中斷處理信號,進而達到對電路保護的目的。礦井提升機變頻控制系統過流保護電路見圖8。

圖8 變頻控制系統過流保護電路
3 礦井提升機變頻調速控制系統軟件設計
以礦井提升機控制系統的相關硬件選型和電路設計為基礎,還需要進一步對其軟件進行設計以更好地實現礦井提升機安全可靠地運行。本次軟件設計以礦井提升機實際運行信號采集、參數設置、運行速度、提升行程等各項運行數據,進而對上述運行參數之間的關系進行分析,并通過控制系統對礦井提升機的實際運行速度進行調整。本次礦井提升機軟件設計將嵌入式的μC-OS-Ⅱ操作系統應用于LPC2131型ARM嵌入式處理器當中,采用C語言進行編程,將礦井提升機控制系統中實現不同功能的各個模塊通過定義成不同任務的方法,且根據所執行任務的重要性將其設置為不同執行順序。
3.1 軟件系統層次劃分
礦井提升機變頻控制系統軟件層次劃分為硬件層、操作層和應用層。硬件層為前文所述以LPC2131型ARM嵌入式處理器為平臺而搭建的整體硬件,而操作層為μC-OS-Ⅱ操作系統。針對應用層,主要是由信號采集、控制執行以及保護等三個程序實現主要功能的。其中,信號采集程序,主要是完成電流、電壓、速度、溫度等參數的檢測任務。控制執行程序,主要是通過矢量控制和PID等算法完成發送軟件系統控制指令的任務。保護程序主要是完成對過流、欠過壓、過熱等異常運行現象進行報警甚至設備運行急停的任務。上述各個任務之間的參數數據等采用郵箱的方式進行傳遞。
礦井提升機變頻控制系統軟件應用層任務劃分見圖9。

圖9 變頻控制系統軟件應用層任務劃分
3.2 軟件任務的劃分及建立
通過圖8可以知,信號采集、控制執行以及保護等三個程序的九項任務,通過μC-OS-Ⅱ操作系統由可以細化成見表1。

表1 μC-OS-Ⅱ操作系統具體九項任務程序
3.3 過速過卷錯向控制
過速過卷錯向控制主要是通過矢量控制來實現的,對速度檢測任務的模擬量進行矢量控制,以達到對礦井提升機故障進行報警并啟動相應安全回路的目的。礦井提升機控制系統矢量控制程序框圖見圖10。
4 結語

圖10 控制系統矢量控制程序框
通過將上述礦井提升機變頻調速控制系統應用于東古城煤礦生產實踐當中,礦井提升機采用2JK-3.5/20單繩纏繞式提升機,卷筒直徑3.5 m,卷筒寬度1.7 m,兩個卷筒中心距1840 m,最大靜張力112.7 kN,提升速度6.78 m/s;電動機采用Yr800-8/1180型6 kV高壓三相交流異步電動機,額定功率800 kW,轉速740 r/min;鋼絲繩采用Ф=40 mm,6×19右捻鍍鋅鋼絲繩,抗拉強度170.0 kN/m2。現場實際運行狀況表明,該套設備能夠實現遠程實時監測,保證礦井提升機運行的穩定性和可靠性,對于礦井安全高效生產的實現具有積極的現實意義。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
